S2MDF: A Plug-And-Play Layer for Intersection-Free Multi-Object Signed Distance Fields
Pith reviewed 2026-06-29 08:23 UTC · model grok-4.3
The pith
S2MDF introduces a plug-and-play module that enforces hard constraints on multi-object signed distance fields to eliminate interpenetrations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central discovery is a hard constraint on vector-valued SDFs that can be enforced by the S2MDF module on any compositional SDF representation. This module prevents interpenetration to numerical precision without requiring architectural modifications to the base model, introduces negligible overhead, and remains compatible with linearly-interpolated meshing like Marching Cubes. It outperforms soft penalty methods in experiments on state-of-the-art compositional approaches.
What carries the argument
S2MDF, a lightweight plug-and-play module enforcing a hard constraint on vector-valued SDFs to prevent object interpenetration.
If this is right
- Compositional SDF methods produce intersection-free geometries.
- Intersections are reduced to numerical precision.
- Reconstruction quality is preserved.
- The module adds negligible computational cost.
- It works with standard meshing algorithms.
Where Pith is reading between the lines
- This constraint could be adapted to other implicit representations for consistent multi-object modeling.
- Applying it post-training might allow quick fixes to existing reconstructions.
- It may facilitate integration with physics engines by ensuring non-intersecting meshes from the start.
Load-bearing premise
The method assumes that the hard constraint can be applied as a plug-and-play module without needing changes to the underlying SDF representation and while staying compatible with standard meshing.
What would settle it
Observing persistent interpenetrations above numerical precision or a drop in reconstruction quality after applying S2MDF to a state-of-the-art compositional SDF would falsify the claim.
Figures


read the original abstract
Compositional implicit surface representations model scenes as collections of objects, each encoded by a Signed Distance Field (SDF). A fundamental limitation of this approach is that multiple SDFs can produce geometries that interpenetrate, violating physical plausibility. Existing mitigation strategies rely on soft penalty terms that reduce but do not eliminate intersections, and require careful loss weighting. To truly prevent interpenetration, we propose a hard constraint on vector-valued SDFs and introduce S2MDF, a lightweight plug-and-play module that enforces the constraint on any object-compositional SDF representation without architectural modifications. It introduces negligible computational overhead and is compatible with linearly-interpolated standard meshing algorithms such as Marching Cubes. It can be applied during training or as a post-processing step. Experiments on multiple state-of-the-art compositional methods show that S2MDF reduces intersections to numerical precision while preserving reconstruction quality, outperforming existing mitigation strategies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that compositional SDF representations suffer from interpenetrations that soft penalties only mitigate, and introduces S2MDF as a lightweight plug-and-play module enforcing a hard constraint on vector-valued SDFs. This module can be added to any existing object-compositional SDF method without architectural changes, applied during training or post-processing, introduces negligible overhead, remains compatible with standard Marching Cubes meshing, and reduces intersections to numerical precision while preserving reconstruction quality, outperforming prior mitigation strategies.
Significance. If the central claim holds, the result would be significant because it replaces soft, tunable penalties with a hard, parameter-free constraint that guarantees intersection-free output for any compositional SDF pipeline. The plug-and-play nature and Marching Cubes compatibility would make the technique immediately usable across existing reconstruction methods without retraining or custom meshing.
major comments (2)
- [Abstract] Abstract and method description: the claim that S2MDF enforces a pointwise hard constraint (no overlapping negative regions) everywhere while remaining compatible with linearly interpolated Marching Cubes is load-bearing for the central contribution, yet no functional form of the enforcement operation (e.g., component-wise max, conditional projection, or other non-linear map) is shown to guarantee that satisfaction at grid vertices implies satisfaction after linear interpolation inside cells. If the operation is non-linear, interpolated values can violate the constraint or shift zero crossings, creating new intersections.
- [Experiments] Experiments section: the abstract asserts that intersections are reduced 'to numerical precision' across multiple state-of-the-art methods, but the provided description supplies neither the quantitative metric used to measure residual intersections nor the grid resolution and tolerance values at which this precision is achieved, making it impossible to verify whether the hard-constraint property survives meshing.
minor comments (1)
- [Method] Notation for the vector-valued SDF and the precise definition of the hard constraint (e.g., the mathematical statement that min_i f_i(x) > 0 or equivalent) should be stated explicitly in the method section before describing the module.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review. The comments highlight important aspects of our contribution that require clarification. We provide point-by-point responses below and will update the manuscript to address these issues.
read point-by-point responses
-
Referee: [Abstract] Abstract and method description: the claim that S2MDF enforces a pointwise hard constraint (no overlapping negative regions) everywhere while remaining compatible with linearly interpolated Marching Cubes is load-bearing for the central contribution, yet no functional form of the enforcement operation (e.g., component-wise max, conditional projection, or other non-linear map) is shown to guarantee that satisfaction at grid vertices implies satisfaction after linear interpolation inside cells. If the operation is non-linear, interpolated values can violate the constraint or shift zero crossings, creating new intersections.
Authors: We agree that the functional form and the guarantee for linear interpolation are crucial for the claim. In the revised manuscript, we will explicitly describe the enforcement operation used in S2MDF and provide a detailed explanation or proof demonstrating that the hard constraint is preserved under linear interpolation within grid cells, ensuring compatibility with standard Marching Cubes. This will strengthen the presentation of the method. revision: yes
-
Referee: [Experiments] Experiments section: the abstract asserts that intersections are reduced 'to numerical precision' across multiple state-of-the-art methods, but the provided description supplies neither the quantitative metric used to measure residual intersections nor the grid resolution and tolerance values at which this precision is achieved, making it impossible to verify whether the hard-constraint property survives meshing.
Authors: We will revise the experiments section to include the specific quantitative metric for measuring residual intersections, as well as the grid resolutions and tolerance values employed in our evaluations. This will enable readers to verify the reduction to numerical precision and the survival of the hard-constraint property after meshing. revision: yes
Circularity Check
No circularity: S2MDF introduced as independent module without self-referential derivations or fitted predictions.
full rationale
The paper describes S2MDF as a plug-and-play module enforcing a hard constraint on vector-valued SDFs, applicable during training or post-processing, with compatibility to Marching Cubes. No equations, derivations, or self-citations are shown that reduce the intersection-free outcome to fitted parameters, self-definitions, or prior author work by construction. The central claim rests on the module's design as an additive constraint rather than any renaming or load-bearing self-reference, rendering the derivation self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Compositional implicit surface representations model scenes as collections of objects each encoded by an SDF
Reference graph
Works this paper leans on
-
[1]
Achlioptas, O
P. Achlioptas, O. Diamanti, I. Mitliagkas, and L. Guibas. Learning Representations and Generative Models for 3D Point Clouds. pages 40–49, 2018
2018
-
[2]
Optnet: Differentiable optimization as a layer in neural networks
Brandon Amos and J Zico Kolter. Optnet: Differentiable optimization as a layer in neural networks. InInternational conference on machine learning, pages 136–145. PMLR, 2017
2017
-
[3]
Leveraging augmented-lagrangian techniques for differentiating over infeasible quadratic programs in machine learning
Antoine Bambade, Fabian Schramm, Adrien Taylor, and Justin Carpentier. Leveraging augmented-lagrangian techniques for differentiating over infeasible quadratic programs in machine learning. InThe Twelfth International Conference on Learning Representations, 2024
2024
-
[4]
Boyd and L
S. Boyd and L. Vandenberghe.Convex Optimization. Cambridge University Press, 2004
2004
-
[5]
Chan and E.O
S.L. Chan and E.O. Purisima. A new tetrahedral tesselation scheme for isosurface generation. Computers & Graphics, 22(1):83–90, 1998
1998
-
[6]
Dora: Sampling and benchmarking for 3d shape variational auto-encoders
Rui Chen, Jianfeng Zhang, Yixun Liang, Guan Luo, Weiyu Li, Jiarui Liu, Xiu Li, Xiaoxiao Long, Jiashi Feng, and Ping Tan. Dora: Sampling and benchmarking for 3d shape variational auto-encoders. 2025
2025
-
[7]
Y . Chen, J. Yang, D. S. Mercadier, H. Le, and P. Fua. Medtet: An Online Motion Model for 4D Heart Reconstruction. 2024
2024
-
[8]
Chen and H
Z. Chen and H. Zhang. Learning Implicit Fields for Generative Shape Modeling. 2019
2019
-
[9]
Chibane, A
J. Chibane, A. Mir, and G. Pons-Moll. Neural Unsigned Distance Fields for Implicit Function Learning. 2020
2020
-
[10]
C. Choy, D. Xu, J. Gwak, K. Chen, and S. Savarese. 3D-R2n2: A Unified Approach for Single and Multi-View 3D Object Reconstruction. pages 628–644, 2016
2016
-
[11]
A. Dai, C. Qi, and M. Nießner. Shape Completion Using 3D-Encoder-Predictor CNNs and Shape Synthesis. 2017
2017
-
[12]
B. Deng, S. Kulal, Z. Deng, C. Deng, Y . Tian, and J. Wu. Unsupervised Learning of Shape Programs with Repeatable Implicit Parts. 2022
2022
-
[13]
Doi and A
A. Doi and A. Koide. An Efficient Method of Triangulating Equivalued Surfaces by Using Tetrahedral Cells.Transactopms on Information and Systems, 74(1):214–224, 1991
1991
-
[14]
Dumery, A
C. Dumery, A. Fan, R. Li, N. Talabot, and P. Fua. Enforcing View-Consistency in Class-Agnostic 3D Segmentation Fields. June 2025
2025
-
[15]
H. Fan, H. Su, and L. Guibas. A Point Set Generation Network for 3D Object Reconstruction from a Single Image. 2017
2017
-
[16]
Ref-neus: Ambiguity- reduced neural implicit surface learning for multi-view reconstruction with reflection
Wenhang Ge, Tao Hu, Haoyu Zhao, Shu Liu, and Ying-Cong Chen. Ref-neus: Ambiguity- reduced neural implicit surface learning for multi-view reconstruction with reflection. 2023
2023
-
[17]
Groueix, M
T. Groueix, M. Fisher, V . Kim, B. Russell, and M. Aubry. Atlasnet: A Papier-Mâché Approach to Learning 3D Surface Generation. 2018
2018
-
[18]
Guillard, E
B. Guillard, E. Remelli, A. Lukoianov, S. Richter, T. Bagautdinov, P. Baque, and P. Fua. Deepmesh: Differentiable Iso-Surface Extraction. 46(11):7072–7087, 2024
2024
-
[19]
Guillard, F
B. Guillard, F. Stella, and P. Fua. Meshudf: Fast and Differentiable Meshing of Unsigned Distance Field Networks. pages 576–592, 2022
2022
-
[20]
Z. Hao, H. Averbuch-Elor, N. Snavely, and S. Belongie. Dualsdf: Semantic Shape Manipulation Using a Two-Level Representation. pages 7631–7641, 2020
2020
-
[21]
Jiang, D
Y . Jiang, D. Ji, Z. Han, and M. Zwicker. Sdfdiff: Differentiable Rendering of Signed Distance Fields for 3D Shape Optimization. 2020
2020
-
[22]
T. Ju, F. Losasso, S. Schaefer, and J. Warren. Dual Contouring of Hermite Data. 2002. 11
2002
-
[23]
Kanazawa, S
A. Kanazawa, S. Tulsiani, A. Efros, and J. Malik. Learning Category-Specific Mesh Recon- struction from Image Collections. 2018
2018
-
[24]
Karunratanakul, J
K. Karunratanakul, J. Yang, Y . Zhang, M. Black, K. Muandet, and S. Tang. Grasping Field: Learning Implicit Representations for Human Grasps. 2020
2020
-
[25]
vmap: Vectorised object mapping for neural field slam
Xin Kong, Shikun Liu, Marwan Taher, and Andrew J Davison. vmap: Vectorised object mapping for neural field slam. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 952–961, 2023
2023
-
[26]
Hunyuan3d 2.5: Towards high-fidelity 3d assets generation with ultimate details
Zeqiang Lai, Yunfei Zhao, Haolin Liu, Zibo Zhao, Qingxiang Lin, Huiwen Shi, Xianghui Yang, Mingxin Yang, Shuhui Yang, Yifei Feng, et al. Hunyuan3d 2.5: Towards high-fidelity 3d assets generation with ultimate details. 2025
2025
-
[27]
H. Le, J. Xu, N. Talabot, J. Yang, and P. Fua. Pairwise-Constrained Implicit Functions for 3D Human Heart Modeling. 2025
2025
-
[28]
Lewiner, H
T. Lewiner, H. Lopes, A. W. Vieira, and G. Tavares. Efficient Implementation of Marching Cubes’ Cases with Topological Guarantees. InJournal of Graphics Tools, 2003
2003
-
[29]
Y .-T. Liu, L. Wang, J. Yang, W. Chen, X. Meng, B. Yang, and L. Gao. NeUDF: Leaning Neural Unsigned Distance Fields with V olume Rendering. 2023
2023
-
[30]
Implicit modeling of non-rigid objects with cross-category signals, 2023
Yuchun Liu, Benjamin Planche, Meng Zheng, Zhongpai Gao, Pierre Sibut-Bourde, Fan Yang, Terrence Chen, and Ziyan Wu. Implicit modeling of non-rigid objects with cross-category signals, 2023
2023
-
[31]
X. Long, C. Lin, L. Liu, Y . Liu, P. Wang, C. Theobalt, T. Komura, and W. Wang. Neuraludf: Learning Unsigned Distance Fields for Multi-View Reconstruction of Surfaces with Arbitrary Topologies. 2022
2022
-
[32]
Lorensen and H.E
W.E. Lorensen and H.E. Cline. Marching Cubes: A High Resolution 3D Surface Construction Algorithm. pages 163–169, 1987
1987
-
[33]
Mescheder, M
L. Mescheder, M. Oechsle, M. Niemeyer, S. Nowozin, and A. Geiger. Occupancy Networks: Learning 3D Reconstruction in Function Space. pages 4460–4470, 2019
2019
-
[34]
Ben Mildenhall, S. P. P., M. Tancik, J. T. Barron, R. Ramamoorthi, and R. Ng. NeRF: Repre- senting Scenes as Neural Radiance Fields for View Synthesis. 2020
2020
-
[35]
Mittal, Y .-C
P. Mittal, Y .-C. Cheng, M. Singh, and S. Tulsiani. AutoSDF: Shape Priors for 3D Completion, Reconstruction and Generation. 2022
2022
-
[36]
K. Mo, S. Zhu A. X., Chang, L. Yi, S. Tripathi, L. J. Guibas, and H. Su. PartNet: A Large-Scale Benchmark for Fine-Grained and Hierarchical Part-Level 3D Object Understanding. 2019
2019
-
[37]
Niemeyer and A
M. Niemeyer and A. Geiger. GIRAFFE: Representing Scenes As Compositional Generative Neural Feature Fields. 2021
2021
-
[38]
Pan and K
J. Pan and K. Jia. Deep Mesh Reconstruction from Single RGB Images via Topology Modifica- tion Networks. 2019
2019
-
[39]
J. J. Park, P. Florence, J. Straub, R. A. Newcombe, and S. Lovegrove. Deepsdf: Learning Continuous Signed Distance Functions for Shape Representation. 2019
2019
-
[40]
S. Peng, C. Jiang, Y . Liao, M. Niemeyer, M. Pollefeys, and A. Geiger. Shape as Points: A Differentiable Poisson Solver. 2021
2021
-
[41]
Petrov, M
D. Petrov, M. Gadelha, R. Mˇech, and E. Kalogerakis. ANISE: Assembly-Based Neural Implicit Surface Reconstruction. InIEEE Transactions on Visualization and Computer Graphics, 2023
2023
-
[42]
Atlas-based shared-boundary deformable multi-surface models through multi-material and two-manifold dual contouring.Information, 14(4), 2023
Tanweer Rashid, Sharmin Sultana, Mallar Chakravarty, and Michel Albert Audette. Atlas-based shared-boundary deformable multi-surface models through multi-material and two-manifold dual contouring.Information, 14(4), 2023. 12
2023
-
[43]
Remelli, A
E. Remelli, A. Lukoianov, S. Richter, B. Guillard, T. Bagautdinov, P. Baque, and P. Fua. Meshsdf: Differentiable Iso-Surface Extraction. 2020
2020
-
[44]
D. Ren, H. Shi, J. Zheng, and J. Cai.Mcgrids: Monte Carlo-Driven Adaptive Grids For iso- Surface Extraction, page 127144. Springer Nature Switzerland, September 2024
2024
-
[45]
T. Shen, J. Gao, K. Yin, M.-Y . Liu, and S. Fidler. Deep Marching Tetrahedra: A Hybrid Representation for High-Resolution 3D Shape Synthesis. 2021
2021
-
[46]
Stella, N
F. Stella, N. Talabot, H. Le, and P. Fua. High Resolution UDF Meshing via Iterative Networks. 2025
2025
-
[47]
Julian Straub, Thomas Whelan, Lingni Ma, Yufan Chen, Erik Wijmans, Simon Green, Jakob J. Engel, Raul Mur-Artal, Carl Ren, Shobhit Verma, Anton Clarkson, Mingfei Yan, Brian Budge, Yajie Yan, Xiaqing Pan, June Yon, Yuyang Zou, Kimberly Leon, Nigel Carter, Jesus Briales, Tyler Gillingham, Elias Mueggler, Luis Pesqueira, Manolis Savva, Dhruv Batra, Hauke M. S...
work page internal anchor Pith review Pith/arXiv arXiv 1906
-
[48]
Takikawa, J
T. Takikawa, J. Litalien, K. Yin, K. Kreis, C. Loop, D. Nowrouzezahrai, A. Jacobson, M. McGuire, and S. Fidler. Neural Geometric Level of Detail: Real-Time Rendering with Implicit 3D Shapes. 2021
2021
-
[49]
PartSDF: Part-Based Implicit Neural Representation for Composite 3D Shape Parametrization and Optimization
Nicolas Talabot, Olivier Clerc, Arda Cinar Demirtas, Alexis Goujon, Hieu Le, Doruk Oner, and Pascal Fua. PartSDF: Part-Based Implicit Neural Representation for Composite 3D Shape Parametrization and Optimization. October 2025
2025
-
[50]
Tancik, E
M. Tancik, E. Weber, E. Ng, R. Li, B. Yi, J. Kerr, T. Wang, A. Kristoffersen, J. Austin, K. Salahi, A. Ahuja, D. McAllister, and A. Kanazawa. Nerfstudio: A Modular Framework for Neural Radiance Field Development. 2023
2023
-
[51]
Tertikas, D
K. Tertikas, D. Paschalidou, B. Pan J. J.and Park, M. A. Uy, I. Emiris, Y . Avrithis L., and Guibas. Generating Part-Aware Editable 3D Shapes Without 3D Supervision. 2023
2023
-
[52]
Regularised marching tetrahedra: improved iso-surface extraction.Computers & Graphics, 23(4):583–598, 1999
Graham M Treece, Richard W Prager, and Andrew H Gee. Regularised marching tetrahedra: improved iso-surface extraction.Computers & Graphics, 23(4):583–598, 1999
1999
-
[53]
Lung image segmentation with improved u-net, v-net and seg-net techniques.PeerJ Computer Science, 11:e2700, 2025
Fuat Turk and Mahmut Kılıçaslan. Lung image segmentation with improved u-net, v-net and seg-net techniques.PeerJ Computer Science, 11:e2700, 2025
2025
-
[54]
S. Vasu, N. Talabot, A. Lukoianov, P. Baque, J. Donier, and P. Fua. Hybridsdf: Combining Free Form Shapes and Geometric Primitives for Effective Shape Manipulation. 2022
2022
-
[55]
B. Wang, C. Lu, and Y . Bo. DM-NeRF: 3D Scene Geometry Decomposition and Manipulation from 2D Images. 2023
2023
-
[56]
N. Wang, Y . Zhang, Z. Li, Y . Fu, W. Liu, and Y . Jiang. Pixel2mesh: Generating 3D Mesh Models from Single RGB Images. 2018
2018
-
[57]
P. Wang, L. Liu, Y . Liu, C. Theobalt, T. Komura, and W. Wang. Neus: Learning Neural Implicit Surfaces by V olume Rendering for Multi-View Reconstruction. 2021
2021
-
[58]
Totalsegmen- tator: Robust Segmentation of 104 Anatomic Structures in CT Images.Radiology: Artificial Intelligence, 2023
Jakob Wasserthal, Hanns-Christian Breit, Manfred T Meyer, Maurice Pradella, Daniel Hinck, Alexander W Sauter, Tobias Heye, Daniel T Boll, Joshy Cyriac, Shan Yang, et al. Totalsegmen- tator: Robust Segmentation of 104 Anatomic Structures in CT Images.Radiology: Artificial Intelligence, 2023
2023
-
[59]
J. Wu, C. Zhang, T. Xue, B. Freeman, and J. Tenenbaum. Learning a Probabilistic Latent Space of Object Shapes via 3D Generative-Adversarial Modeling. pages 82–90, 2016
2016
-
[60]
Object-compositional neural implicit surfaces
Qianyi Wu, Xian Liu, Yuedong Chen, Kejie Li, Chuanxia Zheng, Jianfei Cai, and Jianmin Zheng. Object-compositional neural implicit surfaces. InEuropean Conference on Computer Vision, 2022. 13
2022
-
[61]
Objectsdf++: Improved object-compositional neural implicit surfaces
Qianyi Wu, Kaisiyuan Wang, Kejie Li, Jianmin Zheng, and Jianfei Cai. Objectsdf++: Improved object-compositional neural implicit surfaces. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 21764–21774, 2023
2023
-
[62]
R. Wu, Y . Zhuang, K. Xu, H. Zhang, and B. Chen. PQ-NET: A Generative Part Seq2seq Network for 3D Shapes. 2020
2020
-
[63]
Z. Wu, S. Song, A. Khosla, F. Yu, L. Zhang, X. Tang, and J. Xiao. 3D Shapenets: A Deep Representation for V olumetric Shapes. pages 1912–1920, 2015
1912
-
[64]
C. Xie, K. Park, R. Martin-Brualla, and M. Brown. FiG-NeRF: Figure-Ground Neural Radiance Fields for 3D Object Category Modelling, 2021
2021
-
[65]
Y . Yang, C. Feng, Y . Shen, and D. Tian. Foldingnet: Point Cloud Auto-Encoder via Deep Grid Deformation. June 2018
2018
-
[66]
Monosdf: Exploring monocular geometric cues for neural implicit surface reconstruction.Advances in Neural Information Processing Systems (NeurIPS), 2022
Zehao Yu, Songyou Peng, Michael Niemeyer, Torsten Sattler, and Andreas Geiger. Monosdf: Exploring monocular geometric cues for neural implicit surface reconstruction.Advances in Neural Information Processing Systems (NeurIPS), 2022
2022
-
[67]
X. Zeng, A. Vahdat, F. Williams, Z. Gojcic, O. Litany, S. Fidler, and K. Kreis. LION: Latent Point Diffusion Models for 3D Shape Generation. 2022
2022
-
[68]
Zhang, M
B. Zhang, M. Nießner, and P. Wonka. 3DILG: Irregular Latent Grids for 3D Generative Modeling. 2022
2022
-
[69]
Zhang, J
B. Zhang, J. Tang, M. Nießner, and P. Wonka. 3DShape2VecSet: A 3D Shape Representation for Neural Fields and Generative Diffusion Models. 2023
2023
-
[70]
Zhang, G
C. Zhang, G. Lin, L. Yang, X. Li, T. Komura, S. Schaefer, J. Keyser, and W. Wang. Surface Extraction from Neural Unsigned Distance Fields. pages 0000–0000, October 2023
2023
-
[71]
An implicit parametric morphable dental model.ACM Trans
Congyi Zhang, Mohamed Elgharib, Gereon Fox, Min Gu, Christian Theobalt, and Wenping Wang. An implicit parametric morphable dental model.ACM Trans. Graph., 41(6), nov 2022
2022
-
[72]
Clay: A controllable large-scale generative model for creating high-quality 3d assets.ACM Transactions on Graphics, 2024
Longwen Zhang, Ziyu Wang, Qixuan Zhang, Qiwei Qiu, Anqi Pang, Haoran Jiang, Wei Yang, Lan Xu, and Jingyi Yu. Clay: A controllable large-scale generative model for creating high-quality 3d assets.ACM Transactions on Graphics, 2024
2024
-
[73]
S. Zhi, T. Laidlow, S. Leutenegger, and A. Davison. In-Place Scene Labelling and Understanding with Implicit Scene Representation. 2021
2021
-
[74]
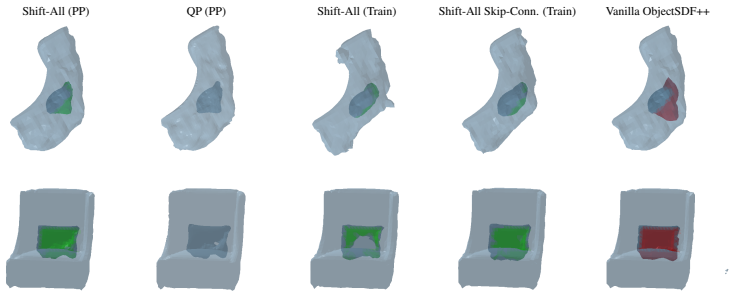
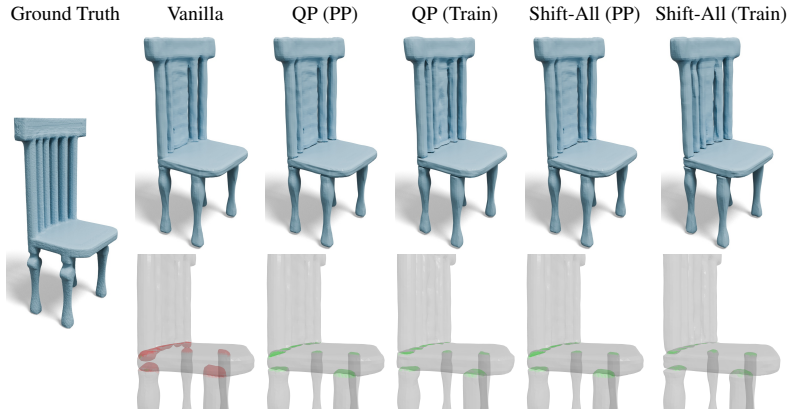
X. Zhuang. Multivariate Mixture Model for Myocardial Segmentation Combining Multi-Source Images. 41(12):2933–2946, 2018. 14 Ground Truth Vanilla QP (PP) QP (Train) Shift-All (PP) Shift-All (Train) Figure A.1: PartSDF [ 49]: visualization of intersections. Intersecting surfaces are in red, while touching surfaces are in green. A.1 Additional Results We sho...
2018
-
[75]
= 0 =⇒d ∗ 2 =−d ∗ 1 (27) By stationarity,∇f(d ∗) +λ∇g(d ∗) = 0, and substituting the aboved ∗ 2 =−d ∗ 1: 2 d∗ 1 −u 1 −d∗ 1 −u 2 −λ 1 1 = 0 0 =⇒ d∗ 1 −u 1 =λ/2 −d∗ 1 −u 2 =λ/2 (28) Summing the two equations, we get λ=−(u 1 +u 2). We can plug this result back into the equations to derived ∗: d∗ 1 =u 1 + λ 2 =u 1 − u1 +u 2 2 (29) d∗ 2 =u 2 + λ 2 =u 2 − u1 +u...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.