Any-ttach: Quick End-effector Swapping Enables Manipulation Dexterity with Simplicity
Pith reviewed 2026-06-29 06:40 UTC · model grok-4.3
The pith
Robots gain manipulation dexterity by rapidly swapping end-effectors through a shared interface instead of relying on complex high-DoF hands.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
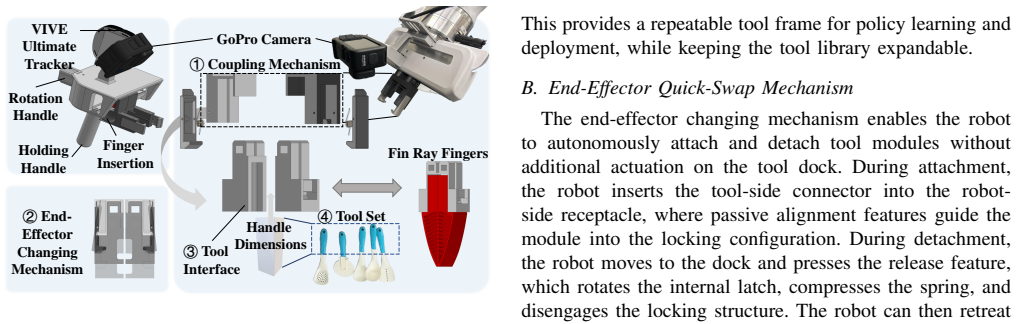
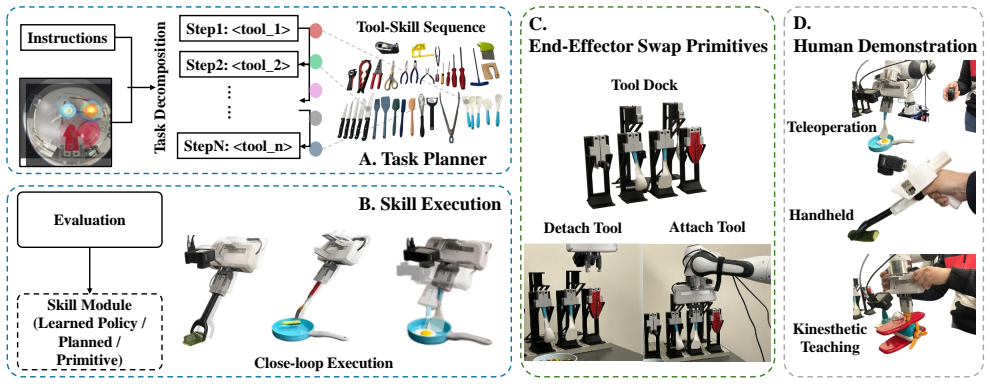
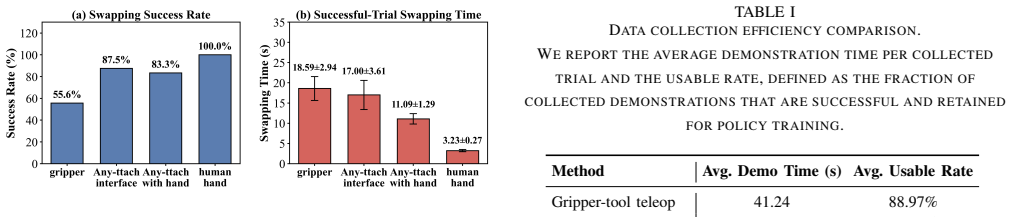
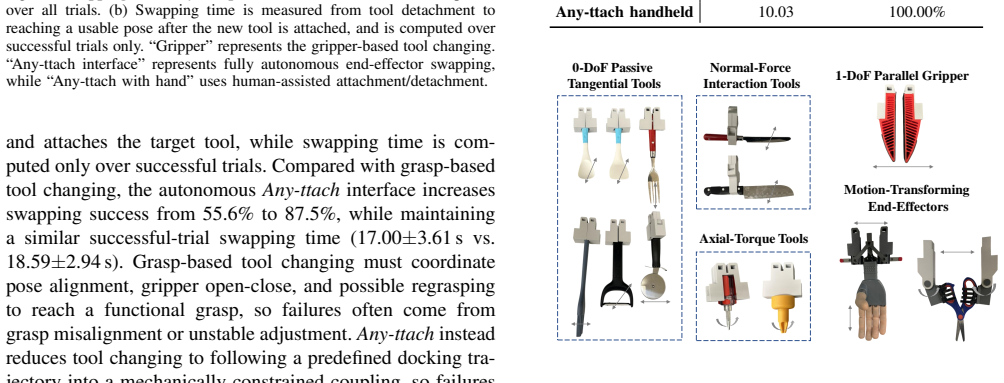
Any-ttach demonstrates that treating quick end-effector swapping as a core mechanism allows a single robot to perform diverse tool-use skills in long-horizon tasks by switching between modules such as daily tools, scissors, Fin Ray fingers, and a low-cost anthropomorphic hand via a shared open-close interface, with improved reliability, demonstration efficiency, and reduced pose variability compared to fixed setups.
What carries the argument
The low-cost automatic swapping mechanism for an open-close robot interface, which enables rapid attachment and detachment of diverse end-effectors while supporting learned, parameterized, and planned skills.
If this is right
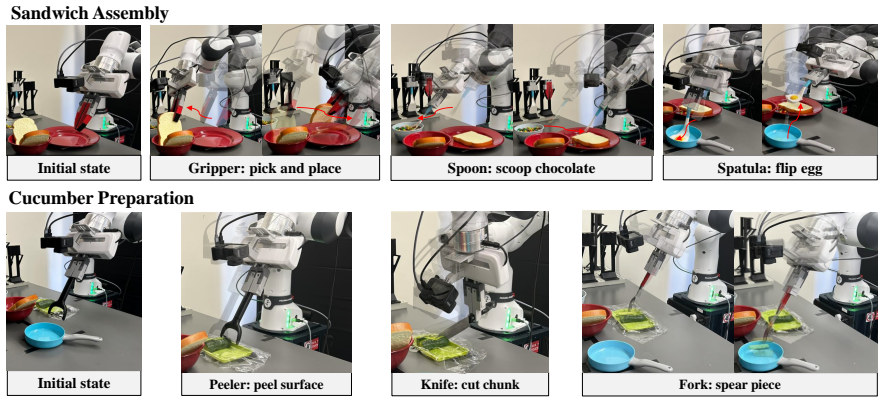
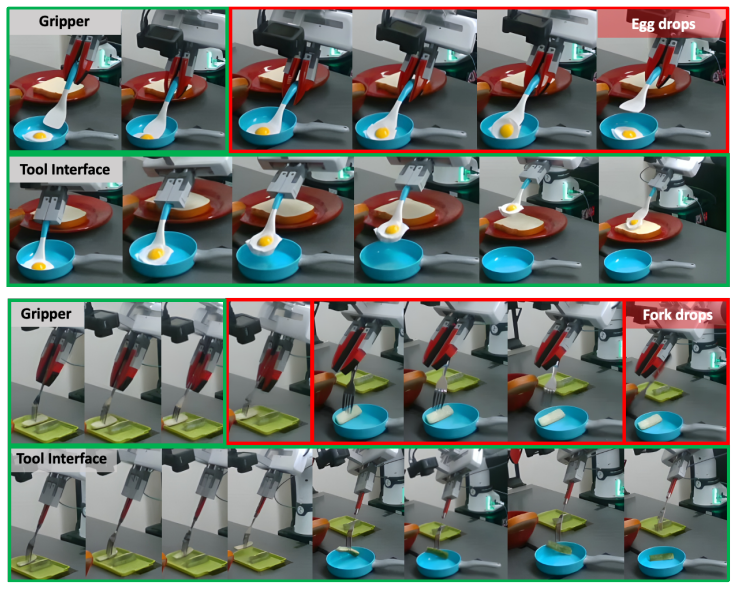
- One robot arm can execute multiple tool-use subskills in tasks like sandwich making and cucumber preparation without hardware redesign.
- Demonstration collection becomes faster and tool-pose variability decreases through the handheld device and shared interface.
- Diverse tools including articulated ones integrate without custom mounting for each.
- Manipulation capability expands by adding exchangeable modules rather than increasing end-effector complexity.
Where Pith is reading between the lines
- The same swapping approach could let robots adapt to new household objects by adding off-the-shelf tools on demand.
- Integration with existing motion planners might further reduce the need for task-specific end-effector design.
- Long-term reliability data from repeated swaps in varied environments would clarify scalability limits.
Load-bearing premise
The automatic swapping mechanism and execution monitoring stay reliable when the robot performs many tool changes during unstructured, extended tasks.
What would settle it
A sequence of more than six tool swaps in a single long-horizon task where misalignment or monitoring failure causes the robot to drop or mishandle a tool.
Figures


read the original abstract
Robotic manipulation dexterity is often pursued by building increasingly complex high-DoF multifingered hands. While many robotic hands are designed to replicate human morphology, the functional role of human hands suggests a different perspective: much of their complexity may exist to enable tool use and tool making. This observation motivates Any-ttach, a tool-centric manipulation framework that treats quick end-effector swapping as a mechanism for dexterity with simplicity. Any-ttach combines a low-cost automatic swapping mechanism for an open-close robot interface, a handheld device for collecting human demonstrations, and a task planning framework that composes learned, parameterized, and planned tool-use skills. The system supports diverse tools and end-effector modules, including daily tools, articulated tools such as scissors, Fin Ray fingers, and a low-cost anthropomorphic hand, through the same shared interface. Our experiments show that Any-ttach improves tool-swapping reliability, increases demonstration efficiency, reduces tool-pose variability, and supports diverse tool-use skills. In two long-horizon tasks, making a sandwich and preparing a cucumber, Any-ttach executes six tool-use subskills through end-effector switching and execution monitoring. These results suggest that robots can expand manipulation capability not only through more complex end-effectors, but also through rapidly exchangeable tools and end-effector modules. More details and videos are available at https://any-ttach.github.io/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents Any-ttach, a tool-centric robotic manipulation framework that achieves dexterity through rapid end-effector swapping rather than complex fixed hands. It combines a low-cost automatic swapping mechanism for an open-close interface, a handheld device for human demonstrations, and a planning framework that composes learned, parameterized, and planned tool-use skills. The system supports diverse tools (daily tools, scissors, Fin Ray fingers, anthropomorphic hand) via a shared interface. Experiments claim improved reliability, efficiency, and reduced pose variability, with the system executing six tool-use subskills via swapping and monitoring in long-horizon sandwich-making and cucumber-preparation tasks.
Significance. If the experimental claims hold with supporting data, the work offers a concrete alternative to high-DoF end-effector design by demonstrating that modular, quickly exchangeable tools can expand manipulation capability in unstructured tasks. This could simplify hardware while preserving versatility, with potential impact on practical deployment of tool-using robots.
major comments (2)
- [Abstract] Abstract: The claims of improved tool-swapping reliability, increased demonstration efficiency, reduced tool-pose variability, and successful execution of six subskills in long-horizon tasks are stated without any quantitative metrics (success rates, trial counts, error bars, baselines, or failure-mode statistics). This absence directly undermines evaluation of the central claim that the shared interface plus monitoring sustains repeated swaps reliably.
- [Abstract] Abstract (sandwich and cucumber experiments): The description states that Any-ttach 'executes six tool-use subskills through end-effector switching and execution monitoring' but supplies no per-swap success rates, number of episodes, or analysis of failure accumulation in unstructured settings. This is load-bearing for the reliability premise required by the dexterity-via-simplicity argument.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract. We agree that quantitative metrics are needed to substantiate the claims and will revise the abstract to include them.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claims of improved tool-swapping reliability, increased demonstration efficiency, reduced tool-pose variability, and successful execution of six subskills in long-horizon tasks are stated without any quantitative metrics (success rates, trial counts, error bars, baselines, or failure-mode statistics). This absence directly undermines evaluation of the central claim that the shared interface plus monitoring sustains repeated swaps reliably.
Authors: We agree that the abstract would be strengthened by including quantitative metrics. The experiments section of the manuscript reports these details (e.g., success rates across trials for swapping and subskills), but they were summarized qualitatively in the abstract. We will revise the abstract to incorporate key metrics such as success rates, trial counts, and variability reductions. revision: yes
-
Referee: [Abstract] Abstract (sandwich and cucumber experiments): The description states that Any-ttach 'executes six tool-use subskills through end-effector switching and execution monitoring' but supplies no per-swap success rates, number of episodes, or analysis of failure accumulation in unstructured settings. This is load-bearing for the reliability premise required by the dexterity-via-simplicity argument.
Authors: We acknowledge this point. The full experimental results include per-swap success rates, episode counts, and failure analysis for the long-horizon tasks. We will update the abstract to report these quantitative details (e.g., overall success rates and episode numbers) to directly support the reliability claims. revision: yes
Circularity Check
No significant circularity; claims rest on hardware experiments
full rationale
The paper describes a hardware system for rapid end-effector swapping, a demonstration collection device, and a task planning framework, then validates them through physical experiments on sandwich-making and cucumber-preparation tasks. No equations, fitted parameters, or mathematical derivations appear in the provided text; the central claims are supported by empirical results on tool-swapping reliability and skill composition rather than any self-definitional loop, fitted-input prediction, or self-citation chain that reduces the result to its own inputs by construction. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
In-hand object rotation via rapid motor adaptation,
H. Qi, A. Kumar, R. Calandra, Y . Ma, and J. Malik, “In-hand object rotation via rapid motor adaptation,” inConference on Robot Learning. PMLR, 2023, pp. 1722–1732
2023
-
[2]
Object-centric dexterous manipulation from human motion data,
Y . Chen, C. Wang, Y . Yang, and C. K. Liu, “Object-centric dexterous manipulation from human motion data,”arXiv preprint arXiv:2411.04005, 2024
-
[3]
Dexgraspnet: A large-scale robotic dexterous grasp dataset for general objects based on simulation,
R. Wang, J. Zhang, J. Chen, Y . Xu, P. Li, T. Liu, and H. Wang, “Dexgraspnet: A large-scale robotic dexterous grasp dataset for general objects based on simulation,”arXiv preprint arXiv:2210.02697, 2022
-
[4]
Leap hand: Low-cost, effi- cient, and anthropomorphic hand for robot learning,
K. Shaw, A. Agarwal, and D. Pathak, “Leap hand: Low-cost, effi- cient, and anthropomorphic hand for robot learning,”arXiv preprint arXiv:2309.06440, 2023
-
[5]
Tool making, hand morphology and fossil hominins,
M. W. Marzke, “Tool making, hand morphology and fossil hominins,” Philosophical Transactions of the Royal Society B: Biological Sci- ences, vol. 368, no. 1630, p. 20120414, 2013
2013
-
[6]
Precision grips, hand morphology, and tools,
M. M. W, “Precision grips, hand morphology, and tools,”American Journal of Physical Anthropology, vol. 102, no. 1, pp. 91–110, 1997
1997
-
[7]
Extrinsic dexterity: In-hand manipulation with external forces,
N. C. Dafle, A. Rodriguez, R. Paolini, B. Tang, S. S. Srinivasa, M. Erdmann, M. T. Mason, I. Lundberg, H. Staab, and T. Fuhlbrigge, “Extrinsic dexterity: In-hand manipulation with external forces,” in 2014 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2014, pp. 1578–1585
2014
-
[8]
Learning dexterous in-hand manipulation,
O. M. Andrychowicz, B. Baker, M. Chociej, R. Jozefowicz, B. Mc- Grew, J. Pachocki, A. Petron, M. Plappert, G. Powell, A. Ray,et al., “Learning dexterous in-hand manipulation,”The International Journal of Robotics Research, vol. 39, no. 1, pp. 3–20, 2020
2020
-
[9]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
V . Makoviychuk, L. Wawrzyniak, Y . Guo, M. Lu, K. Storey, M. Mack- lin, D. Hoeller, N. Rudin, A. Allshire, A. Handa,et al., “Isaac gym: High performance gpu-based physics simulation for robot learning,” arXiv preprint arXiv:2108.10470, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[10]
Mujoco: A physics engine for model-based control,
E. Todorov, T. Erez, and Y . Tassa, “Mujoco: A physics engine for model-based control,” in2012 IEEE/RSJ international conference on intelligent robots and systems. IEEE, 2012, pp. 5026–5033
2012
-
[11]
Dexterous functional grasping,
A. Agarwal, S. Uppal, K. Shaw, and D. Pathak, “Dexterous functional grasping,”arXiv preprint arXiv:2312.02975, 2023
-
[12]
Learning extrinsic dexterity with parameterized manipulation primitives,
S.-M. Yang, M. Magnusson, J. A. Stork, and T. Stoyanov, “Learning extrinsic dexterity with parameterized manipulation primitives,” in 2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 5404–5410
2024
-
[13]
Prehensile pushing: In-hand manipulation with push-primitives,
N. Chavan-Dafle and A. Rodriguez, “Prehensile pushing: In-hand manipulation with push-primitives,” in2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2015, pp. 6215–6222
2015
-
[14]
Tactile-driven non-prehensile object manipulation via extrinsic contact mode control
M. Oller, D. Berenson, and N. Fazeli, “Tactile-driven non-prehensile object manipulation via extrinsic contact mode control.” inRobotics: Science and Systems, 2024
2024
-
[15]
Learning to grasp the ungraspable with emergent extrinsic dexterity,
W. Zhou and D. Held, “Learning to grasp the ungraspable with emergent extrinsic dexterity,” 2022. [Online]. Available: https://arxiv.org/abs/2211.01500
-
[16]
Challenges for robot manipulation in human environments [grand challenges of robotics],
C. C. Kemp, A. Edsinger, and E. Torres-Jara, “Challenges for robot manipulation in human environments [grand challenges of robotics],” IEEE Robotics & Automation Magazine, vol. 14, no. 1, pp. 20–29, 2007
2007
-
[17]
Leveraging language for accelerated learning of tool manipulation,
A. Z. Ren, B. Govil, T.-Y . Yang, K. R. Narasimhan, and A. Majumdar, “Leveraging language for accelerated learning of tool manipulation,” inConference on Robot Learning. PMLR, 2023, pp. 1531–1541
2023
-
[18]
Robust grasping across diverse sensor qualities: The graspnet-1billion dataset,
H.-S. Fang, M. Gou, C. Wang, and C. Lu, “Robust grasping across diverse sensor qualities: The graspnet-1billion dataset,”The Interna- tional Journal of Robotics Research, vol. 42, no. 12, pp. 1094–1103, 2023
2023
-
[19]
Graspnet-1billion: A large- scale benchmark for general object grasping,
H.-S. Fang, C. Wang, M. Gou, and C. Lu, “Graspnet-1billion: A large- scale benchmark for general object grasping,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2020, pp. 11 444–11 453
2020
-
[20]
Tool-as-interface: Learning robot policies from human tool usage through imitation learning,
H. Chen, C. Zhu, Y . Li, and K. Driggs-Campbell, “Tool-as-interface: Learning robot policies from human tool usage through imitation learning,”arXiv e-prints, pp. arXiv–2504, 2025
2025
-
[21]
Robocook: Long-horizon elasto-plastic object manipulation with diverse tools,
H. Shi, H. Xu, S. Clarke, Y . Li, and J. Wu, “Robocook: Long-horizon elasto-plastic object manipulation with diverse tools,”arXiv preprint arXiv:2306.14447, 2023
-
[22]
Learning tool-aware adaptive compliant control for autonomous regolith exca- vation,
A. Orsula, M. Geist, M. Olivares-Mendez, and C. Martinez, “Learning tool-aware adaptive compliant control for autonomous regolith exca- vation,”arXiv preprint arXiv:2509.05475, 2025
-
[23]
Robustness-aware tool selection and manipulation planning with learned energy-informed guidance,
Y . Dong, Y . Zhang, S. Calinon, and F. T. Pokorny, “Robustness-aware tool selection and manipulation planning with learned energy-informed guidance,”arXiv preprint arXiv:2506.03362, 2025
-
[24]
Creative robot tool use with large language models,
M. Xu, P. Huang, W. Yu, S. Liu, X. Zhang, Y . Niu, T. Zhang, F. Xia, J. Tan, and D. Zhao, “Creative robot tool use with large language models,”arXiv preprint arXiv:2310.13065, 2023
-
[25]
Hands for dexterous manipulation and robust grasping: A difficult road toward simplicity,
A. Bicchi, “Hands for dexterous manipulation and robust grasping: A difficult road toward simplicity,”IEEE Transactions on robotics and automation, vol. 16, no. 6, pp. 652–662, 2000
2000
-
[26]
Robot tool use: A survey,
M. Qin, J. Brawer, and B. Scassellati, “Robot tool use: A survey,” Frontiers in Robotics and AI, vol. 9, p. 1009488, 2023
2023
-
[27]
Force-and-motion constrained planning for tool use,
R. Holladay, T. Lozano-P ´erez, and A. Rodriguez, “Force-and-motion constrained planning for tool use,” in2019 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2019, pp. 7409–7416
2019
-
[28]
Robotic tool changers,
ATI Industrial Automation, “Robotic tool changers,” https://www. ati-ia.com/products/toolchanger/robot tool changer.aspx
-
[29]
SWS quick change system,
SCHUNK, “SWS quick change system,” https://schunk.com/de/en/ automation-technology/tool-changer/sws/c/PGR 1135
-
[30]
Design of automatic tool changer for universal robots UR5,
B. Dhakal, “Design of automatic tool changer for universal robots UR5,” Master’s thesis, Tampere University of Applied Sciences, 2019
2019
-
[31]
Design and maneuver of a tool- changer using switchable magnet for a tool hung by a cable,
D. Cheong, H. Park, and N. Kim, “Design and maneuver of a tool- changer using switchable magnet for a tool hung by a cable,” inIEEE International Conference on Automation Science and Engineering (CASE), 2024, pp. 1252–1257
2024
-
[32]
Coaxial magnetic gear-based tool- changing system,
H. Song, J. Hur, and S. Jeong, “Coaxial magnetic gear-based tool- changing system,”IEEE Access, vol. 12, pp. 33 749–33 756, 2024
2024
-
[33]
Design for 3D printing of a robotic arm tool changer under the framework of Industry 5.0,
D. Mourtzis, J. Angelopoulos, M. Papadokostakis, and N. Panopoulos, “Design for 3D printing of a robotic arm tool changer under the framework of Industry 5.0,” inProcedia CIRP, vol. 115, 2022, pp. 178–183
2022
-
[34]
Toward robotic manipulation,
M. T. Mason, “Toward robotic manipulation,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 1, no. 1, pp. 1–28, 2018
2018
-
[35]
Ghallab, D
M. Ghallab, D. Nau, and P. Traverso,Automated Planning: theory and practice. Elsevier, 2004
2004
-
[36]
Integrated task and motion planning,
C. R. Garrett, R. Chitnis, R. Holladay, B. Kim, T. Silver, L. P. Kael- bling, and T. Lozano-P ´erez, “Integrated task and motion planning,” Annual review of control, robotics, and autonomous systems, vol. 4, no. 1, pp. 265–293, 2021
2021
-
[37]
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
M. Ahn, A. Brohan, N. Brown, Y . Chebotar, O. Cortes, B. David, C. Finn, C. Fu, K. Gopalakrishnan, K. Hausman,et al., “Do as i can, not as i say: Grounding language in robotic affordances,”arXiv preprint arXiv:2204.01691, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[38]
Inner Monologue: Embodied Reasoning through Planning with Language Models
W. Huang, F. Xia, T. Xiao, H. Chan, J. Liang, P. Florence, A. Zeng, J. Tompson, I. Mordatch, Y . Chebotar,et al., “Inner monologue: Embodied reasoning through planning with language models,”arXiv preprint arXiv:2207.05608, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[39]
LLM+P: Empowering Large Language Models with Optimal Planning Proficiency
B. Liu, Y . Jiang, X. Zhang, Q. Liu, S. Zhang, J. Biswas, and P. Stone, “Llm+ p: Empowering large language models with optimal planning proficiency,”arXiv preprint arXiv:2304.11477, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[40]
Code as policies: Language model programs for embodied control,
J. Liang, W. Huang, F. Xia, P. Xu, K. Hausman, B. Ichter, P. Florence, and A. Zeng, “Code as policies: Language model programs for embodied control,” in2023 IEEE International conference on robotics and automation (ICRA). IEEE, 2023, pp. 9493–9500
2023
-
[41]
VoxPoser: Composable 3D Value Maps for Robotic Manipulation with Language Models
W. Huang, C. Wang, R. Zhang, Y . Li, J. Wu, and L. Fei-Fei, “V oxposer: Composable 3d value maps for robotic manipulation with language models,”arXiv preprint arXiv:2307.05973, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[42]
Rt-2: Vision-language-action models transfer web knowledge to robotic control,
B. Zitkovich, T. Yu, S. Xu, P. Xu, T. Xiao, F. Xia, J. Wu, P. Wohlhart, S. Welker, A. Wahid,et al., “Rt-2: Vision-language-action models transfer web knowledge to robotic control,” inConference on Robot Learning. PMLR, 2023, pp. 2165–2183
2023
-
[43]
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn, “Learning fine-grained bimanual manipulation with low-cost hardware,”arXiv preprint arXiv:2304.13705, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[44]
Diffusion policy: Visuomotor policy learning via action diffusion,
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song, “Diffusion policy: Visuomotor policy learning via action diffusion,”The International Journal of Robotics Research, vol. 44, no. 10-11, pp. 1684–1704, 2025
2025
-
[45]
Universal manipulation interface: In- the-wild robot teaching without in-the-wild robot data,
C. Chi, Z. Xu, C. Pan,et al., “Universal manipulation interface: In- the-wild robot teaching without in-the-wild robot data,” inRobotics: Science and Systems (RSS), 2024
2024
-
[46]
J. Kulozik and N. Jarrass ´e, “Evaluating the precision of the htc vive ultimate tracker with robotic and human movements under varied environmental conditions,”arXiv preprint arXiv:2409.01947, 2024
-
[47]
Openai gpt-5 system card,
A. Singh, A. Fry, A. Perelman,et al., “Openai gpt-5 system card,”
-
[48]
[Online]. Available: https://arxiv.org/abs/2601.03267
work page internal anchor Pith review Pith/arXiv arXiv
-
[49]
Reducing the barrier to entry of complex robotic software: a MoveIt! case study,
D. Coleman, I. A. Sucan, S. Chitta, and N. Correll, “Reducing the barrier to entry of complex robotic software: a MoveIt! case study,” Journal of Software Engineering for Robotics, vol. 5, no. 1, pp. 3–16, 2014
2014
-
[50]
SAM 3: Segment Anything with Concepts
N. Carion, L. Gustafson, Y .-T. Hu, S. Debnath, R. Hu, D. Suris, C. Ryali, K. V . Alwala, H. Khedr, A. Huang,et al., “Sam 3: Segment anything with concepts,”arXiv preprint arXiv:2511.16719, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.