Multi-Modal Multi-Agent Robotic Cognitive Alignment enabled by Non-Invasive Consumer Brain Computer Interfaces: A Proof of Concept Exploration
Pith reviewed 2026-06-27 06:55 UTC · model grok-4.3
The pith
Consumer EEG signals let robotic agents hold messages until human mental workload drops.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
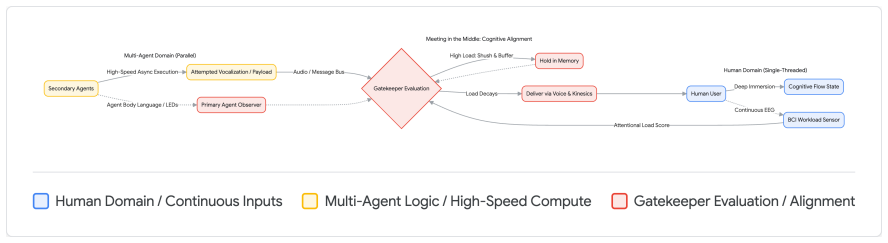
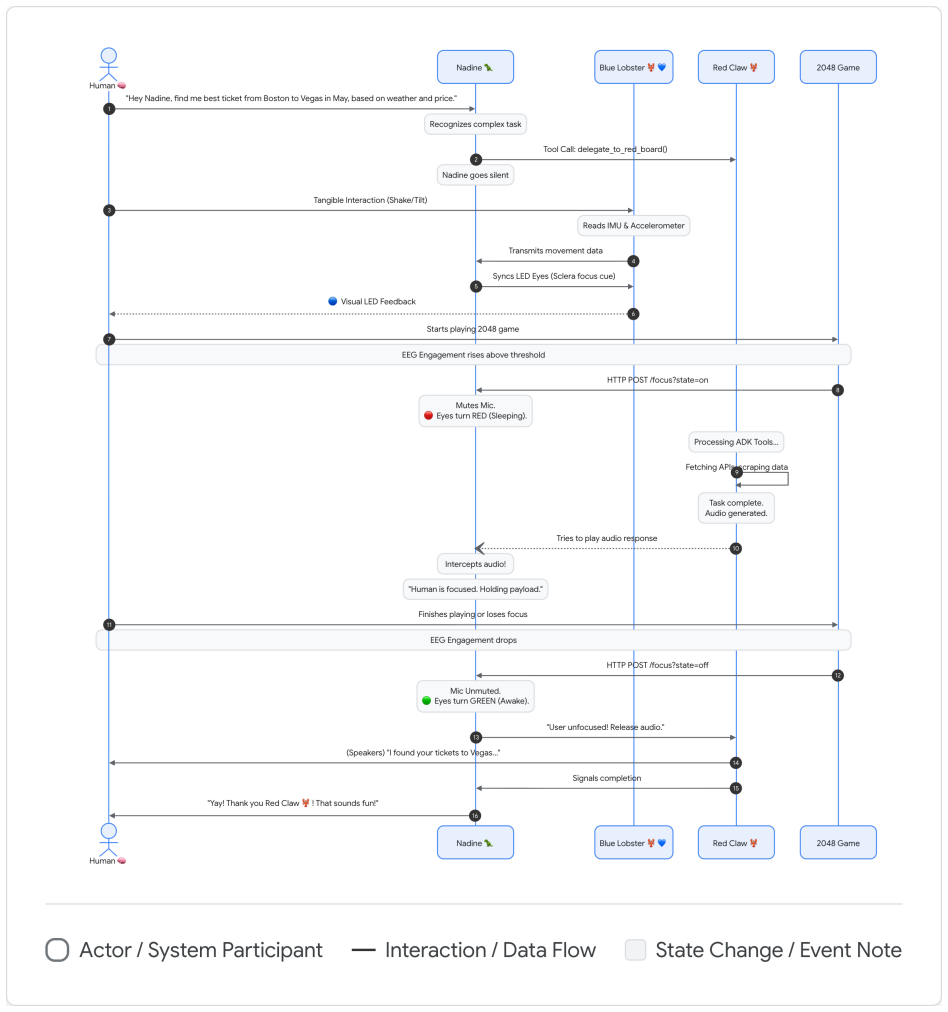
A closed-loop architecture that continuously monitors EEG spectral band powers from a consumer BCI can detect high human engagement, place a primary agent's sensory inputs and audio outputs into a holding state, allow secondary agents to process delegated tasks, and release the queued messages once cognitive load returns to baseline.
What carries the argument
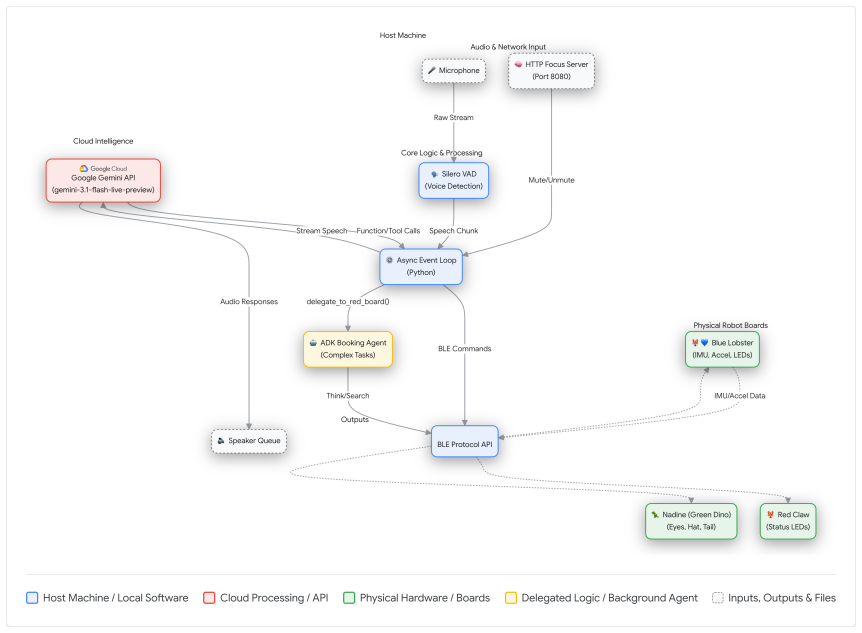
Engagement-driven pipeline with HTTP-based signaling that uses real-time EEG spectral band powers to control when robotic agents communicate with the human.
If this is right
- Multi-agent robotic systems can avoid interrupting a user during focused periods without requiring explicit user commands.
- Secondary agents can complete background tasks while the primary agent remains silent.
- The same signaling mechanism can be applied across different physical robot embodiments.
- Real-time signal processing combined with LLMs can produce contextually deferred agent outputs.
Where Pith is reading between the lines
- Extending the pipeline to additional sensors such as eye tracking or heart rate could reduce reliance on any single EEG feature.
- The same deferral logic might apply to non-robotic agents such as smartphone notifications or software assistants.
- Privacy considerations arise when EEG data continuously leaves the device to drive agent behavior.
Load-bearing premise
EEG spectral band powers from a consumer-grade BCI can reliably and continuously indicate moments of high mental workload and engagement during a real task.
What would settle it
A controlled test in which the consumer BCI signals show no reliable correlation with independent measures of workload such as task performance errors or self-reported engagement levels.
Figures






read the original abstract
While non-verbal behaviors and expressive movements are essential for natural human-robot interaction, existing methods often overlook a crucial element: the human's internal cognitive state. Frequently, proactive multi-agent systems can interrupt humans at inopportune moments, leading to cognitive overload and decreased task performance. This paper introduces a framework for generating "cognitively aligned" multi-agent interactions, enhancing the ability of robotic systems to contextually defer communications to the user of an agent system during moments of high human mental workload and engagement. We present the design and implementation of a closed-loop architecture that explores the interplay between autonomous task execution and real-time neurophysiological focus. Using a consumer-grade Brain-Computer Interface (BCI), our approach continuously monitors Electroencephalography (EEG) spectral band powers while a human performs an engagement-inducing task. We propose an engagement-driven pipeline where an HTTP-based signaling mechanism places a primary agent's sensory inputs and audio outputs into a holding state upon detecting high engagement. This allows secondary agents to seamlessly process complex, delegated tasks in the background. Once the human's cognitive state returns to a lower cognitive load baseline, the primary agent releases the queued agent message. Our preliminary results demonstrate the feasibility of leveraging real-time signal processing, Large Language Models (LLMs), and physical robotic embodiments to create cognitively-aware, non-intrusive multi-agent systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a closed-loop framework for cognitively aligned multi-agent robotic systems. A consumer-grade BCI continuously monitors EEG spectral band powers during an engagement-inducing task; upon detecting high mental workload, an HTTP signaling mechanism holds primary-agent sensory inputs and audio outputs, allowing secondary agents to process delegated tasks in the background. Once EEG indicators return to a lower-load baseline, the primary agent releases queued messages. The authors state that preliminary results demonstrate feasibility of combining real-time signal processing, LLMs, and physical robotic embodiments for non-intrusive, cognitively-aware interaction.
Significance. If the feasibility claim were supported by reported validation, the integration of consumer BCI signals with multi-agent robotics could address a practical gap in HRI by reducing interruptions during high cognitive load. The conceptual architecture linking neurophysiological monitoring to agent deferral is a reasonable direction, but the absence of any empirical results prevents evaluation of its contribution.
major comments (2)
- [Abstract] Abstract: the assertion that 'our preliminary results demonstrate the feasibility...' is unsupported; the manuscript supplies no experimental details, accuracy metrics, error analysis, or even basic description of how spectral band powers are mapped to workload states.
- [Abstract] Abstract (central claim): the closed-loop pipeline is described as continuously monitoring EEG to trigger holding states, yet no calibration procedure, feature extraction steps, classification thresholds, or correlation with any ground-truth workload measure is provided, leaving the detection reliability untested.
minor comments (1)
- [Abstract] Abstract: the phrase 'engagement-driven pipeline' is used without prior definition or differentiation from the workload-monitoring mechanism already described.
Simulated Author's Rebuttal
We thank the referee for their detailed review and constructive feedback. We address the major comments below and will revise the manuscript to better align the abstract with the proof-of-concept scope of the work.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion that 'our preliminary results demonstrate the feasibility...' is unsupported; the manuscript supplies no experimental details, accuracy metrics, error analysis, or even basic description of how spectral band powers are mapped to workload states.
Authors: We agree that the abstract's phrasing overstates the empirical content. The manuscript describes a conceptual closed-loop framework and its implementation as a proof-of-concept exploration, without a formal user study or quantitative validation. We will revise the abstract to remove the sentence claiming that preliminary results demonstrate feasibility and instead emphasize the system design and integration of consumer BCI with multi-agent robotics. revision: yes
-
Referee: [Abstract] Abstract (central claim): the closed-loop pipeline is described as continuously monitoring EEG to trigger holding states, yet no calibration procedure, feature extraction steps, classification thresholds, or correlation with any ground-truth workload measure is provided, leaving the detection reliability untested.
Authors: The referee correctly identifies that the manuscript does not include calibration details, specific thresholds, or ground-truth validation. As this is an exploratory proof-of-concept paper focused on the overall architecture rather than a validated BCI classifier, we will revise the abstract to qualify the EEG monitoring description as using standard spectral band power analysis for engagement detection, without implying tested reliability or providing unstated procedural details. revision: yes
Circularity Check
No circularity: experimental proof-of-concept without derivations or fitted predictions
full rationale
The paper frames its contribution as a design and implementation of a closed-loop architecture for a proof-of-concept exploration. No equations, parameter fitting, or mathematical derivations appear in the provided text. The central feasibility claim rests on real-time signal processing and preliminary experimental results rather than any reduction of a prediction to its own inputs by construction. No self-citation chains, uniqueness theorems, or ansatzes are invoked to justify a theoretical result. The work is therefore self-contained against external benchmarks as an engineering demonstration.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
NeuroSkill (tm): Proactive Real-Time Agentic System Capable of Modeling Human State of Mind
Kosmyna, Nataliya, and Eugene Hauptmann. "NeuroSkill (tm): Proactive Real-Time Agentic System Capable of Modeling Human State of Mind. " arXiv preprint arXiv:2603.03212(2026). β/(A+θ) β 17
arXiv 2026
-
[2]
OpenClaw AI. (n.d.). OpenClaw AI. Retrieved 2026 May 31, from hps://openclaw.ai/
2026
-
[3]
NeuroChat: A Neuroadaptive AI Chatbot for Customizing Learning Experiences
Baradari, Dünya, Nataliya Kosmyna, Oscar Petrov, Rebecah Kaplun, and Paie Maes. "NeuroChat: A Neuroadaptive AI Chatbot for Customizing Learning Experiences. " In Proceedings of the 7th ACM Conference on Conversational User Interfaces (CUI '25), Article 57, 1–21. New York, NY: ACM, 2025. hps://doi.org/10.1145/3719160.3736623
-
[4]
Kosmyna, Nataliya, and Paie Maes. “AentivU: An EEG-Based Closed-Loop Biofeedback System for Real-Time Monitoring and Improvement of Engagement for Personalized Learning. ” Sensors (Basel, Switzerland) vol. 19,23 5200. 27 Nov. 2019, doi:10.3390/s19235200
-
[5]
AentivU: Designing EEG and EOG Compatible Glasses for Physiological Sensing and Feedback in the Car
Kosmyna, Nataliya, Caitlin Morris, anh Nguyen, Sebastian Zepf, Javier Hernandez, and Paie Maes. "AentivU: Designing EEG and EOG Compatible Glasses for Physiological Sensing and Feedback in the Car. " In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI '19), 355–368. New ...
2019
-
[6]
A Brain-Controlled adruped Robot: A Proof-of-Concept Demonstration
Kosmyna, Nataliya, Eugene Hauptmann, and Yasmeen Hmaidan. 2024. "A Brain-Controlled adruped Robot: A Proof-of-Concept Demonstration" Sensors 24, no. 1: 80. https://doi.org/10.3390/s24010080
-
[7]
Kosmyna, Nataliya, Eugene Hauptmann, Ye Tong Yuan, Jessica Situ, Xian-Hao Liao, Ashly Vivian Beresnitzky, Iris Braunstein, and Paie Maes. "Your brain on ChatGPT: Accumulation of cognitive debt when using an AI assistant for essay writing task. " arXiv preprint arXiv:2506.08872 4 (2025)
Pith/arXiv arXiv 2025
-
[8]
Embodied ai agents: Modeling the world
Fung, Pascale, Yoram Bachrach, Asli Celikyilmaz, Kamalika Chaudhuri, Delong Chen, Willy Chung, Emmanuel Dupoux et al. "Embodied ai agents: Modeling the world. " arXiv preprint arXiv:2506.22355 (2025)
arXiv 2025
-
[9]
INTELLIGENT FAILURES: CLIPPY MEMES AND THE LIMITS OF DIGITAL ASSISTANTS
Gangopadhyay, Nivedita, and Alois Pichler. 2024. Embodiment and agency in a digital world. Frontiers in Psychology 15:1392949. doi: 10.3389/ fpsyg.2024.1392949 10.Baym, Nancy, Limor Shifman, Christopher Persaud, and Kelly Wagman. 2019. “INTELLIGENT FAILURES: CLIPPY MEMES AND THE LIMITS OF DIGITAL ASSISTANTS”. AoIR Selected Papers of Internet Research 2019...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.