Closed-Form and Constant-Time New-Source Selection for Fault-Tolerant Broadcasting in Dense Eisenstein--Jacobi Networks
Pith reviewed 2026-06-26 19:35 UTC · model grok-4.3
The pith
Closed-form constant-time algorithm selects valid new broadcast source for any two faults in dense Eisenstein-Jacobi networks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
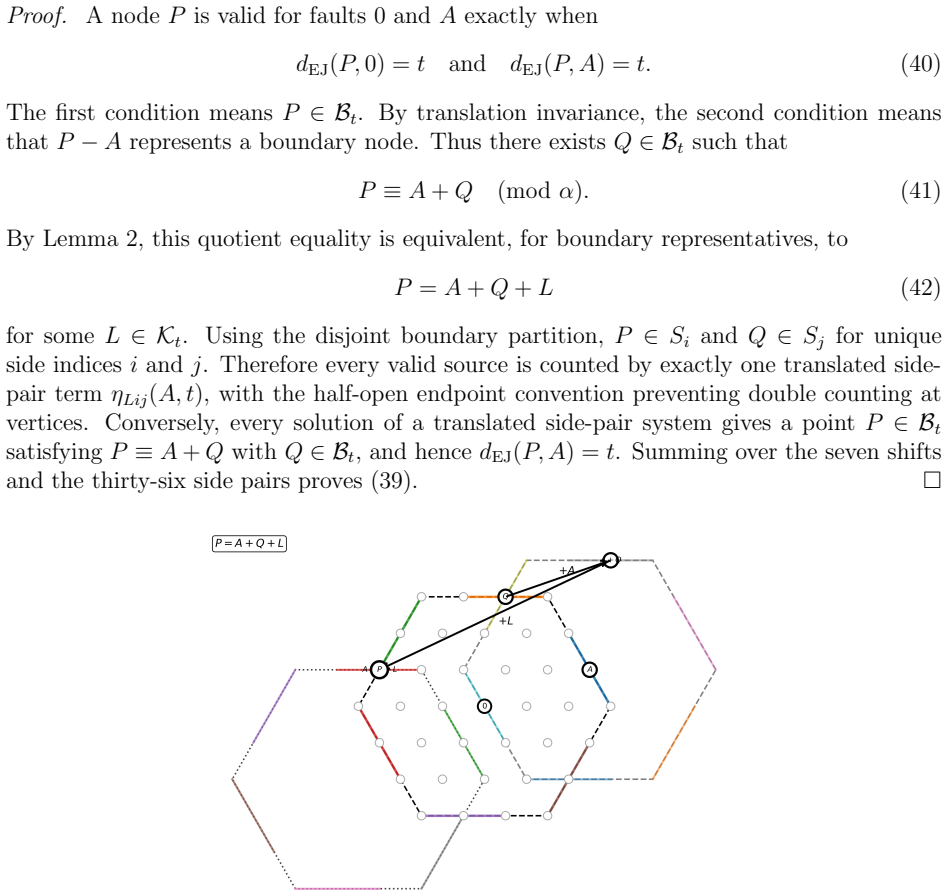
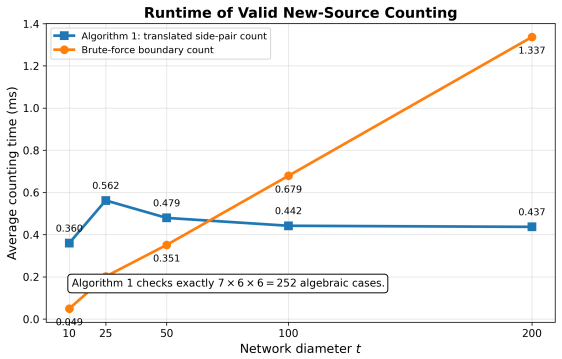
The two-fault problem reduces to a boundary-intersection problem involving the origin and a difference node. The distance-t boundary is partitioned into six directed sides of the Eisenstein-Jacobi hexagon. Since the network is a quotient structure, intersection equations are solved modulo the defining lattice by evaluating seven quotient-lattice shifts across all 6x6 side pairs, for at most 252 algebraic systems. One algorithm counts valid new sources for faults at 0 and A; the second selects one for arbitrary pairs by solving translated systems, verifying each candidate, and shifting back. Each system is either a non-parallel 2x2 linear system with at most one candidate or a parallel system
What carries the argument
Boundary-intersection equations on the six directed sides of the distance-t Eisenstein-Jacobi hexagon, solved via seven quotient-lattice shifts.
If this is right
- The selector always returns a valid new source for arbitrary fault pairs.
- The recovered broadcast reaches all non-faulty nodes.
- Both counting and selection run in O(1) time under fixed-word arithmetic.
- Validation over 500,000 sampled fault pairs and 40,000 re-rooting trials confirms the selector succeeds.
Where Pith is reading between the lines
- The same side-pair enumeration might extend to counting or selecting sources under three faults if the number of systems remains small.
- The algebraic reduction could apply to other quotient lattice networks whose diameter boundary admits a similar six-side partition.
- Constant-time selection removes a practical barrier to deploying re-rooting in large-scale distributed systems with transient faults.
Load-bearing premise
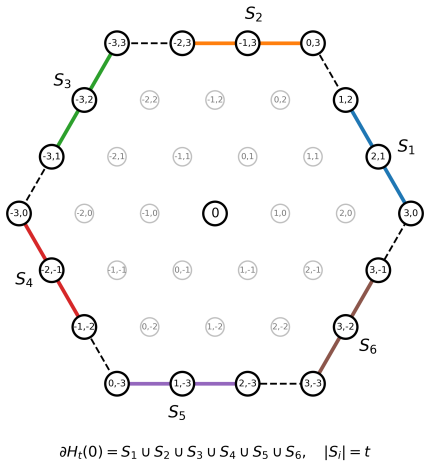
The distance-t boundary can be partitioned into six directed sides and the network is a quotient structure so that intersection equations can be solved exactly modulo the defining lattice.
What would settle it
A pair of faults for which the selector outputs a node that is not at maximum distance from both faults or from which the re-rooted broadcast fails to reach all non-faulty nodes.
Figures







read the original abstract
Fault-tolerant broadcasting in dense Eisenstein--Jacobi networks requires efficient recovery when faulty nodes disrupt the original broadcast structure. A re-rooting-based method guarantees that, for any two faulty nodes, a valid new source exists at maximum graph distance from both faults. However, identifying such a source without scanning the network or testing all boundary candidates remains an open practical problem. This paper presents a closed-form, constant-time algorithm for counting and selecting a valid new source in dense Eisenstein--Jacobi networks under two node faults. The two-fault problem is reduced to a boundary-intersection problem involving the origin and a difference node. The distance-$t$ boundary, where $t$ is the network diameter, is partitioned into six directed sides of the Eisenstein--Jacobi hexagon. Since the network is a quotient structure, intersection equations are solved modulo the defining lattice, requiring evaluation of seven quotient-lattice shifts across all $6\times 6$ side pairs, yielding at most $252$ algebraic systems. The first algorithm counts all valid new sources for faults at $0$ and $A$. The second algorithm selects one valid new source for arbitrary fault pairs by solving translated side-pair systems, verifying each candidate, and shifting back. Each system is either a non-parallel $2\times 2$ linear system with at most one candidate, or a parallel system whose feasible candidates form an integer interval. Both algorithms run in $O(1)$ time under the fixed-word arithmetic model. Computational validation over $500{,}000$ sampled fault pairs and $40{,}000$ re-rooting trials confirms correctness: the selector always returns a valid new source, and the recovered broadcast reaches all non-faulty nodes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to provide closed-form, constant-time algorithms for counting valid new sources and selecting one for re-rooting in fault-tolerant broadcasting on dense Eisenstein-Jacobi networks with two faults. The approach reduces the problem to boundary intersections on the hexagonal distance-t boundary using 6x6 side pairs and 7 lattice shifts, solving up to 252 algebraic systems, with O(1) time in fixed-word model and validation on 500,000 fault pairs.
Significance. Should the constant-time guarantee hold, the result would offer a practical, efficient solution for source selection in these networks, enhancing fault tolerance without network scanning. The explicit reduction to linear systems and extensive sampling validation strengthen the contribution if the time complexity is rigorously established.
major comments (2)
- [Abstract] Abstract (description of the second algorithm): the selector is described as 'solving translated side-pair systems, verifying each candidate, and shifting back' when parallel systems produce integer intervals of feasible points. No non-enumerative rule (e.g., closed-form endpoint formulas or analytical validity test) is supplied; if any interval length scales with t, per-candidate verification costs Ω(t) time and falsifies the O(1) claim under the fixed-word model.
- [Abstract] Abstract (description of the first algorithm): the counting procedure must aggregate valid sources across all 252 systems, including those whose solutions are intervals. Without an explicit O(1) summation formula over each interval, the reported constant-time bound for counting is unsupported.
minor comments (1)
- [Abstract] The abstract writes '500{,}000'; adopt conventional notation such as 500000 or 5\times10^5.
Simulated Author's Rebuttal
We thank the referee for the insightful comments on the constant-time claims. We clarify below that the algorithms rely on closed-form computations for both singleton and interval cases, ensuring O(1) time with a fixed number of systems. We will revise the manuscript to make the non-enumerative rules explicit in the abstract and relevant sections.
read point-by-point responses
-
Referee: [Abstract] Abstract (description of the second algorithm): the selector is described as 'solving translated side-pair systems, verifying each candidate, and shifting back' when parallel systems produce integer intervals of feasible points. No non-enumerative rule (e.g., closed-form endpoint formulas or analytical validity test) is supplied; if any interval length scales with t, per-candidate verification costs Ω(t) time and falsifies the O(1) claim under the fixed-word model.
Authors: The abstract provides a high-level overview. The full paper derives that for parallel side-pair systems, the feasible set is an interval on the boundary side whose endpoints are computed via closed-form solutions to the linear equations (involving the fault difference and lattice shifts). A valid candidate is selected using a fixed analytical rule, such as the endpoint that maximizes distance to the faults or satisfies a simple inequality check, all in constant time without iterating over the interval. The phrase 'verifying each candidate' is imprecise in the abstract; it refers to confirming the selected endpoint. We agree the abstract should be updated for clarity and will do so in revision. revision: yes
-
Referee: [Abstract] Abstract (description of the first algorithm): the counting procedure must aggregate valid sources across all 252 systems, including those whose solutions are intervals. Without an explicit O(1) summation formula over each interval, the reported constant-time bound for counting is unsupported.
Authors: The counting aggregates over the fixed 252 systems using direct formulas: for non-parallel systems, add 0 or 1 based on the unique solution's validity; for parallel systems, the count is the number of lattice points in the interval, given by a closed-form expression such as floor((end - start)/gcd) + 1 adjusted for the quotient, requiring only a constant number of arithmetic operations. These formulas are detailed in the manuscript's algorithmic description. To address the concern, we will add a brief statement in the abstract highlighting the O(1) aggregation formulas. revision: yes
Circularity Check
No circularity; derivation proceeds from lattice geometry and algebraic reduction without self-referential inputs.
full rationale
The paper reduces the fault-tolerant source selection to a boundary-intersection problem on the Eisenstein-Jacobi hexagon, partitions the distance-t boundary into six directed sides, and solves the resulting 6x6 side-pair systems modulo the defining lattice across seven shifts. Both the counting and selection algorithms are built directly by case analysis on these fixed algebraic systems (non-parallel 2x2 yielding at most one solution, parallel yielding an interval), with all steps stated as consequences of the quotient structure. No parameter is fitted to data and then re-used as a prediction, no uniqueness theorem is imported from prior self-work, and no ansatz is smuggled via citation. The O(1) claim under fixed-word arithmetic follows from the constant number of systems (252) rather than from any redefinition of the target quantity. The derivation is therefore self-contained against the stated lattice assumptions.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The distance-t boundary of the dense Eisenstein-Jacobi network partitions into six directed sides of the hexagon.
- domain assumption Intersection equations can be solved modulo the defining lattice using seven quotient-lattice shifts.
Reference graph
Works this paper leans on
-
[1]
The topology of Gaussian and Eisenstein–Jacobi interconnec- tion networks,
M. Flahive and B. Bose, “The topology of Gaussian and Eisenstein–Jacobi interconnec- tion networks,”IEEE Transactions on Parallel and Distributed Systems, vol. 21, no. 8, pp. 1132–1142, 2010. 26
2010
-
[2]
Dense Gaussian networks: Suitable topologies for on-chip multiprocessors,
C. Mart´ ınez, E. Vallejo, R. Beivide, C. Izu, and M. Moret´ o, “Dense Gaussian networks: Suitable topologies for on-chip multiprocessors,”International Journal of Parallel Pro- gramming, vol. 34, no. 3, pp. 193–211, 2006
2006
-
[3]
Gaussian interconnection networks,
R. Beivide, C. Mart´ ınez, and E. Vallejo, “Gaussian interconnection networks,” inProc. Spanish Parallelism Conference, 2005
2005
-
[4]
Hierarchical topologies for large-scale two-level networks,
E. Vallejo, C. Mart´ ınez, and R. Beivide, “Hierarchical topologies for large-scale two-level networks,”Journal of Parallel and Distributed Computing, vol. 68, no. 4, pp. 461–476, 2008
2008
-
[5]
Grama, A
A. Grama, A. Gupta, G. Karypis, and V. Kumar,Introduction to Parallel Computing, 2nd ed. Pearson, 2003
2003
-
[6]
Duato, S
J. Duato, S. Yalamanchili, and L. Ni,Interconnection Networks: An Engineering Ap- proach. Morgan Kaufmann, 2002
2002
-
[7]
W. J. Dally and B. Towles,Principles and Practices of Interconnection Networks. Mor- gan Kaufmann, 2004
2004
-
[8]
A survey on fault-tolerant communication in network-on-chip architectures,
D. Kliazovich, F. Granelli, and D. Miorandi, “A survey on fault-tolerant communication in network-on-chip architectures,”Computer Networks, vol. 54, no. 14, pp. 2434–2452, 2010
2010
-
[9]
Pasricha and N
S. Pasricha and N. Dutt,On-Chip Communication Architectures: System-on-Chip In- terconnect. Morgan Kaufmann, 2008
2008
-
[10]
Flich and D
J. Flich and D. Bertozzi,Designing Network-on-Chip Architectures in the Nanoscale Era. CRC Press, 2010
2010
-
[11]
A distributed algorithm for constructing independent spanning trees in parallel systems,
J. Wu and H. Huang, “A distributed algorithm for constructing independent spanning trees in parallel systems,”IEEE Transactions on Parallel and Distributed Systems, vol. 10, no. 4, pp. 377–381, 1999
1999
-
[12]
Topological properties of hypercubes,
Y. Saad and M. H. Schultz, “Topological properties of hypercubes,”IEEE Transactions on Computers, vol. 37, no. 7, pp. 867–872, 1988
1988
-
[13]
Re-rooting-based fault-tolerant broadcasting in dense Eisenstein–Jacobi networks,
B. Albader, “Re-rooting-based fault-tolerant broadcasting in dense Eisenstein–Jacobi networks,”IEEE Access, 2026
2026
-
[14]
A survey on In- dustrial Internet of Things: A cyber-physical systems perspective,
O. G. Monakhov, E. A. Monakhova, A. Y. Romanov, A. M. Sukhov, and E. V. Lezh- nev, “Adaptive dynamic shortest path search algorithm in networks-on-chip based on circulant topologies,”IEEE Access, vol. 9, pp. 160836–160846, 2021, doi: 10.1109/AC- CESS.2021.3131635
work page doi:10.1109/ac- 2021
-
[15]
A. Y. Romanov, E. V. Lezhnev, A. Y. Glukhikh, and A. A. Amerikanov, “De- velopment of routing algorithms in networks-on-chip based on two-dimensional op- timal circulant topologies,”Heliyon, vol. 6, no. 1, Art. no. e03172, 2020, doi: 10.1016/j.heliyon.2020.e03172. 27
-
[16]
Ring-Split: Deadlock-free routing algorithm for circulant networks-on-chip,
A. Y. Romanov, N. O. Myachin, E. V. Lezhnev, D. A. Ivannikov, and A. El-Mesady, “Ring-Split: Deadlock-free routing algorithm for circulant networks-on-chip,”Micro- machines, vol. 14, no. 1, Art. no. 141, 2023, doi: 10.3390/mi14010141
-
[17]
E. A. Monakhova, O. G. Monakhov, and A. Y. Romanov, “Routing algorithms in opti- mal degree four circulant networks based on relative addressing: Comparative analysis for networks-on-chip,”IEEE Transactions on Network Science and Engineering, vol. 10, no. 1, pp. 413–425, 2023, doi: 10.1109/TNSE.2022.3211985
-
[18]
Virtual coordinate system based on a circulant topology for routing in networks-on-chip,
A. M. Sukhov, A. Y. Romanov, and M. P. Selin, “Virtual coordinate system based on a circulant topology for routing in networks-on-chip,”Symmetry, vol. 16, no. 1, Art. no. 127, 2024, doi: 10.3390/sym16010127
-
[19]
Fault-tolerant network-on-chip router archi- tecture design for heterogeneous many-core systems,
M. Rashid, H. K. Singh, and M. H. Anisi, “Fault-tolerant network-on-chip router archi- tecture design for heterogeneous many-core systems,”Sensors, vol. 20, no. 18, Art. no. 5355, 2020, doi: 10.3390/s20185355
-
[20]
J. Samala, B. B. Mekala, and S. Joshi, “Enhancing fault-tolerant application mapping in network-on-chip through transformer network based reinforcement learning approach,” Discover Computing, vol. 28, Art. no. 16, 2025, doi: 10.1007/s10791-025-09704-0
-
[21]
X. Yu, L. Tang, J. Mi, J. Liu, and L. Long, “Fault tolerant and quality of service aware routing algorithm based on priority technique for scalable network on chip architec- tures,”Scientific Reports, vol. 15, Art. no. 36578, 2025, doi: 10.1038/s41598-025-20381- 3. 28
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.