Real-World Deployment of Massively Parallel Sampling-Based MPC for Contact-Rich Manipulation
Pith reviewed 2026-06-27 01:02 UTC · model grok-4.3
The pith
Sampling-based MPC with structured global sampling outperforms standard methods on real contact-rich robot manipulation tasks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
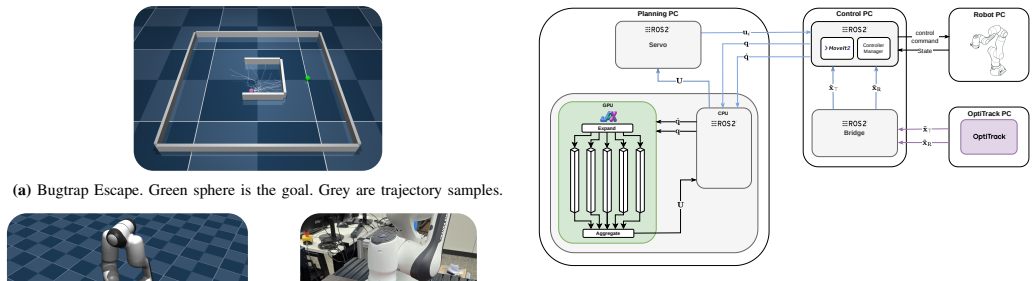
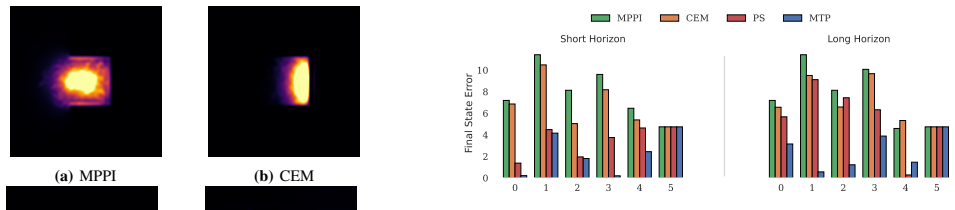
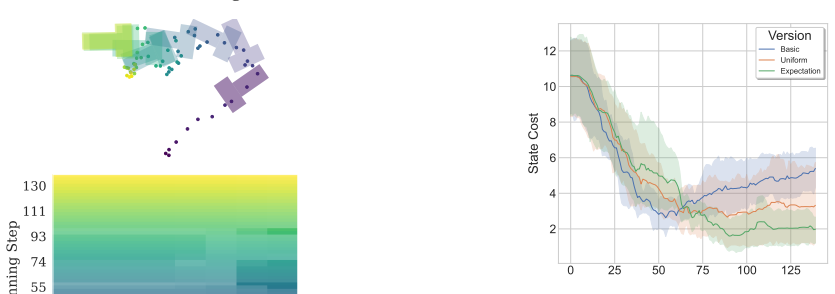
The MTP variant with structured global sampling outperforms unimodal baselines such as CEM, MPPI, and PS across tasks that require mode switching, both in simulation and on hardware. The framework is built with JAX for large-scale parallelization and the high-fidelity MuJoCo MJX simulator, deployed on a Franka Research 3 for the Push-T manipulation task through a real-to-sim-to-real pipeline. Online domain randomization within the MPC sample budget shows that contact-initiation parameters yield interpretable adaptation signals, while global physics parameters provide feedback that is too weak for reliable exploitation at typical replanning frequencies.
What carries the argument
MTP variant with structured global sampling inside a JAX-parallelized MuJoCo MJX sampling-based MPC loop, which evaluates large batches of diverse trajectories to manage multimodal contact behavior.
If this is right
- Structured global sampling enables better handling of contact mode switches than unimodal sampling in both simulation and real hardware.
- The JAX-MuJoCo pipeline supports real-time deployment of massively parallel MPC on a standard robot arm for pushing tasks.
- Contact-initiation parameters can be randomized online inside the MPC budget to produce usable adaptation signals.
- Global physics parameters do not supply strong enough feedback to be exploited reliably at standard MPC replanning rates.
Where Pith is reading between the lines
- Targeted randomization focused only on contact-related parameters may be necessary to make online adaptation practical within tight time limits.
- The same parallel sampling approach could be tested on multi-step assembly or regrasping tasks to check how well it scales when more modes must be considered.
- Tighter integration of real-time perception with the sampling process might reduce reliance on simulator fidelity for contact events.
- Hybrid methods that use structured global sampling for mode discovery and then refine locally could further improve sample efficiency.
Load-bearing premise
The high-fidelity MuJoCo MJX simulator together with the described online domain randomization captures real-world contact dynamics closely enough to support effective sim-to-real transfer and useful adaptation signals at typical MPC replanning frequencies.
What would settle it
A direct comparison showing that the MTP controller does not produce higher success rates than CEM, MPPI, or PS on the physical robot during mode-switching contact tasks, or that contact-initiation randomization signals do not improve performance over a fixed-parameter baseline, would falsify the central claim.
Figures


read the original abstract
Sampling-based Model Predictive Control (SMPC) is a promising strategy for contact-rich robotic manipulation, combining gradient-free optimization with massively parallel GPU simulation. Yet, most prior work relies on simplified dynamics or remains confined to simulation. We present an MPC framework that leverages JAX for large-scale parallelization and efficient computation, coupled with the high-fidelity MuJoCo MJX simulator, and deploy it on a Franka Research 3 executing the Push-T manipulation task through a complete real-to-sim-to-real pipeline. The MTP variant with structured global sampling outperforms unimodal baselines such as CEM, MPPI, and PS across tasks that require mode switching, both in simulation and on hardware. Furthermore, we evaluate online domain randomization within the MPC sample budget, showing that contact-initiation parameters yield interpretable adaptation signals, whereas global physics parameters provide feedback that is too weak for reliable exploitation at typical replanning frequencies. These findings highlight key challenges for sampling-based MPC in contact-rich manipulation-contact sensitivity, tight compute budgets, and the difficulty of obtaining informative domain-randomization signals in real time.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a JAX-based massively parallel sampling-based MPC framework paired with the high-fidelity MuJoCo MJX simulator. It describes a complete real-to-sim-to-real pipeline and deploys the controller on a Franka Research 3 robot for the Push-T contact-rich manipulation task. The central claim is that the MTP variant employing structured global sampling outperforms unimodal baselines (CEM, MPPI, PS) on mode-switching tasks in both simulation and hardware experiments. The work further evaluates online domain randomization within the MPC sample budget and reports that contact-initiation parameters produce interpretable adaptation signals while global physics parameters yield signals too weak for reliable use at typical replanning frequencies.
Significance. If the reported hardware results hold, the paper supplies concrete evidence that large-scale parallel SMPC can be deployed on real hardware for contact-rich manipulation without simplified dynamics. The quantitative comparisons on the Franka Push-T task together with the adaptation-signal analysis constitute a useful empirical contribution to the robotics community. The explicit discussion of compute-budget and contact-sensitivity limitations provides practical guidance that is often missing from simulation-only studies.
minor comments (3)
- [Abstract] Abstract: the statement that MTP 'outperforms' the baselines would be strengthened by a one-sentence summary of the key quantitative metrics (e.g., success rate or cost reduction) obtained on hardware.
- [Method / Experiments] The description of the online domain-randomization procedure would benefit from an explicit statement of the parameter ranges and the exact number of samples allocated to randomization versus task optimization within each replanning cycle.
- [Experiments] Figure captions for the hardware results should include the number of independent trials and any statistical test used to support the reported performance differences.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our work, the recognition of its empirical contribution to real-world deployment of massively parallel SMPC, and the recommendation for minor revision. No major comments were raised in the report.
Circularity Check
No significant circularity; purely empirical claims
full rationale
The paper presents an empirical MPC deployment study with performance comparisons between sampling variants (MTP vs. CEM/MPPI/PS) on simulation and hardware tasks. No derivation chain, equations, fitted parameters, or self-citation load-bearing premises are described in the abstract or reader summary. Claims rest on direct experimental results rather than any reduction of outputs to inputs by construction. This matches the default expectation for non-circular empirical work.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption MuJoCo MJX provides high-fidelity simulation of contact dynamics sufficient for sim-to-real transfer in the Push-T task.
Reference graph
Works this paper leans on
-
[1]
Bradbury, R
J. Bradbury, R. Frostig, P. Hawkins, M. J. Johnson, C. Leary, D. Maclaurin, G. Necula, A. Paszke, J. VanderPlas, S. Wanderman- Milne, and Q. Zhang. (2018) Jax: Composable transformations of python+numpy programs. Software repository. [Online]. Available: https://github.com/jax-ml/jax
2018
-
[2]
(2025) Mujoco documentation: Computation
DeepMind. (2025) Mujoco documentation: Computation. [Online]. Available: https://mujoco.readthedocs.io/en/stable/computation/index. html#geintegration
2025
-
[3]
Full-Order Sampling- Based MPC for Torque-Level Locomotion Control via Diffusion-Style Annealing,
H. Xue, C. Pan, Z. Yi, G. Qu, and G. Shi, “Full-Order Sampling- Based MPC for Torque-Level Locomotion Control via Diffusion-Style Annealing,” Sep. 2024
2024
-
[4]
Real-time whole-body control of legged robots with model- predictive path integral control,
J. Alvarez-Padilla, J. Z. Zhang, S. Kwok, J. M. Dolan, and Z. Manch- ester, “Real-time whole-body control of legged robots with model- predictive path integral control,” in2025 IEEE International Conference on Robotics and Automation (ICRA), 2025, pp. 14 721–14 727
2025
-
[5]
Feedback- mppi: Fast sampling-based mpc via rollout differentiation – adios low- level controllers,
T. Belvedere, M. Ziegltrum, G. Turrisi, and V . Modugno, “Feedback- mppi: Fast sampling-based mpc via rollout differentiation – adios low- level controllers,”IEEE Robotics and Automation Letters, vol. 11, no. 1, pp. 1–8, 2026
2026
-
[6]
Sampling-based Model Predictive Control Leveraging Parallelizable Physics Simulations,
C. Pezzato, C. Salmi, E. Trevisan, M. Spahn, J. Alonso-Mora, and C. H. Corbato, “Sampling-based Model Predictive Control Leveraging Parallelizable Physics Simulations,” Jan. 2025
2025
-
[7]
Model Predictive Path Integral Control: From Theory to Parallel Computation,
G. Williams, A. Aldrich, and E. A. Theodorou, “Model Predictive Path Integral Control: From Theory to Parallel Computation,”Journal of Guidance, Control, and Dynamics, vol. 40, no. 2, pp. 344–357, Feb. 2017
2017
-
[8]
Sample-efficient Cross-Entropy Method for Real-time Planning,
C. Pinneri, S. Sawant, S. Blaes, J. Achterhold, J. Stueckler, M. Rolinek, and G. Martius, “Sample-efficient Cross-Entropy Method for Real-time Planning,” Aug. 2020
2020
-
[9]
Model Tensor Planning,
A. T. Le, K. Nguyen, M. N. Vu, J. Carvalho, and J. Peters, “Model Tensor Planning,” May 2025
2025
-
[10]
Predictive Sampling: Real-time Behaviour Synthesis with MuJoCo,
T. Howell, N. Gileadi, S. Tunyasuvunakool, K. Zakka, T. Erez, and Y . Tassa, “Predictive Sampling: Real-time Behaviour Synthesis with MuJoCo,” Dec. 2022
2022
-
[11]
Information theoretic MPC for model-based reinforcement learning,
G. Williams, N. Wagener, B. Goldfain, P. Drews, J. M. Rehg, B. Boots, and E. A. Theodorou, “Information theoretic MPC for model-based reinforcement learning,” in2017 IEEE International Conference on Robotics and Automation (ICRA). Singapore: IEEE, May 2017, pp. 1714–1721
2017
-
[12]
Model-Based Generalization Under Parameter Uncertainty Using Path Integral Control,
I. Abraham, A. Handa, N. Ratliff, K. Lowrey, T. D. Murphey, and D. Fox, “Model-Based Generalization Under Parameter Uncertainty Using Path Integral Control,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2864–2871, Apr. 2020
2020
-
[13]
V . Kurtz. (2024) Hydrax. Software repository. [Online]. Available: https://github.com/vincekurtz/hydrax
2024
-
[14]
Robot Operating System 2: Design, architecture, and uses in the wild,
S. Macenski, T. Foote, B. Gerkey, C. Lalancette, and W. Woodall, “Robot operating system 2: Design, architecture, and uses in the wild,” vol. 7, no. 66, p. eabm6074, 2022. [Online]. Available: https://www.science.org/doi/abs/10.1126/scirobotics.abm6074
-
[15]
Moveit! task construc- tor for task-level motion planning,
M. G ¨orner, R. Haschke, H. Ritter, and J. Zhang, “Moveit! task construc- tor for task-level motion planning,” in2019 International Conference on Robotics and Automation (ICRA), 2019, pp. 190–196
2019
-
[16]
A new technique for fully autonomous and effi- cient 3d robotics hand/eye calibration,
R. Tsai and R. Lenz, “A new technique for fully autonomous and effi- cient 3d robotics hand/eye calibration,”IEEE Transactions on Robotics and Automation, vol. 5, no. 3, pp. 345–358, 1989
1989
-
[17]
Domain randomization for transferring deep neural networks from simulation to the real world,
J. Tobin, R. Fong, A. Ray, J. Schneider, W. Zaremba, and P. Abbeel, “Domain randomization for transferring deep neural networks from simulation to the real world,” in2017 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2017, pp. 23–30
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.