Re-Rooting-Assisted Edge-Minimum Runtime Repair for Node and Link Failures in Dense Gaussian Broadcast Networks
Pith reviewed 2026-06-26 13:30 UTC · model grok-4.3
The pith
Re-rooting a broadcast tree in dense Gaussian networks requires exactly c-1 repair edges when the healthy component graph stays connected.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
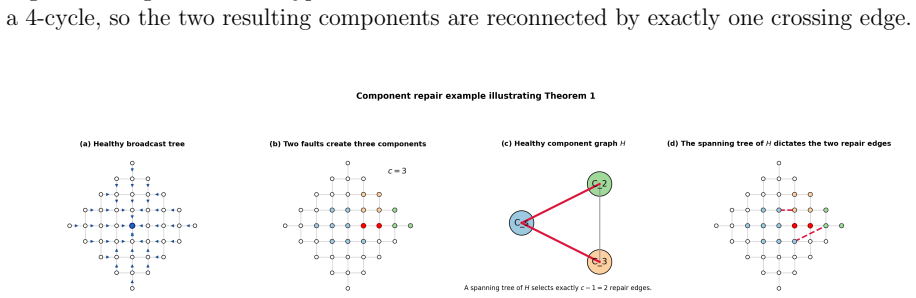
For a selected root with connected healthy component graph, exactly c-1 external repair edges are necessary and sufficient to repair the pruned broadcast tree under static node and link faults, mixed faults, and live single-link faults. The same framework yields deterministic single-link repair, a constant-size boundary-intersection primitive, a link-avoidance exclusion test, and a local-obstruction bound showing that high-order cuts vanish with growing k.
What carries the argument
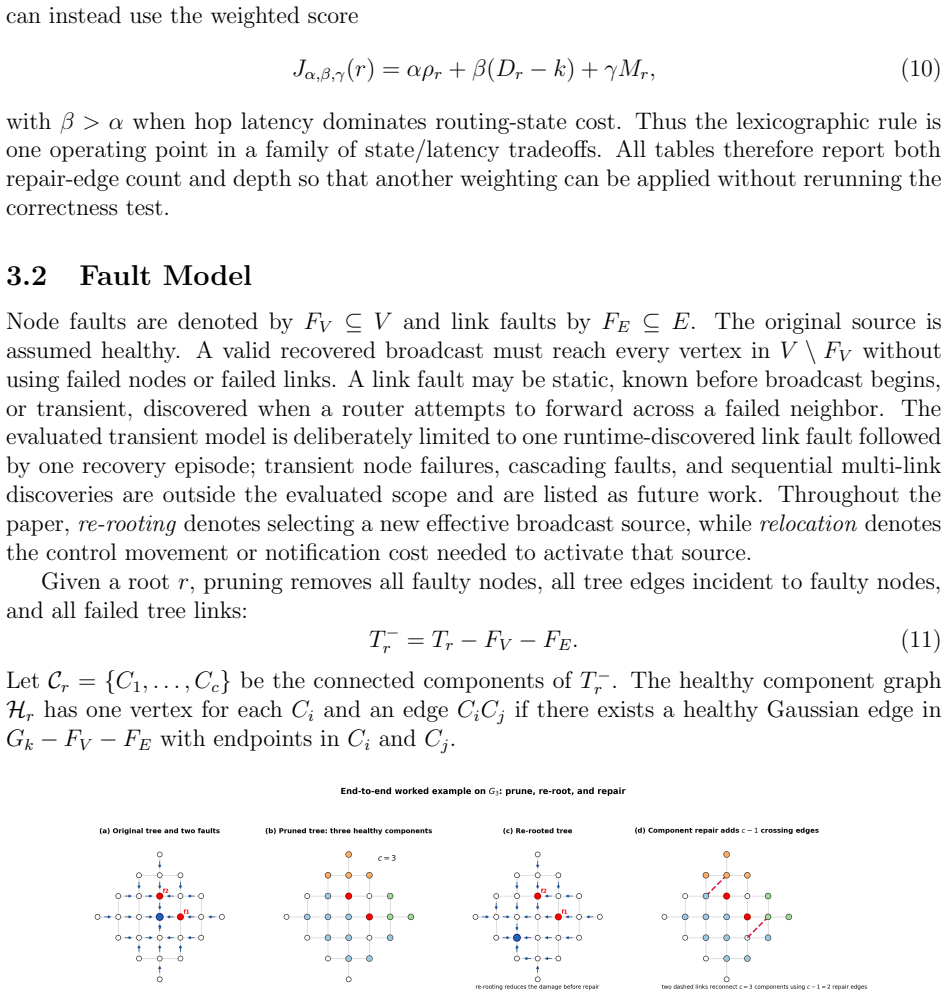
Re-rooting the source to convert known node faults into boundary leaves, followed by pruning failed links and adding the minimum set of edges that reconnect the healthy components of the resulting forest.
If this is right
- Deterministic single-link repair is always achievable.
- Re-rooting reduces the average number of repair edges by 80 to 100 percent compared with fixed-source repair.
- A constant-size boundary-intersection primitive suffices for source selection.
- Recovery reaches 100 percent in deterministic regimes and exceeds 99.96 percent in heuristic and multi-link regimes on networks up to 80k nodes.
- Completion time depends on relocation cost, scheduling, delivery tail, and selector objective rather than solely on the number of repair edges.
Where Pith is reading between the lines
- The same re-rooting plus component-connection approach may apply directly to other degree-four algebraic networks that use coordinate routing.
- The local-obstruction bound offers a way to quantify how fault-tolerance improves with network size without enumerating all possible cuts.
- The separation of repair benefit from completion-cycle latency suggests that future work could optimize the selector objective independently of the repair-edge count.
Load-bearing premise
A root can always be selected so that the healthy component graph after pruning failed nodes and links remains connected.
What would settle it
A concrete network instance in which the healthy component graph is connected yet the minimum number of repair edges required exceeds c-1, or a case in which relocation succeeds but recovery still fails.
Figures


read the original abstract
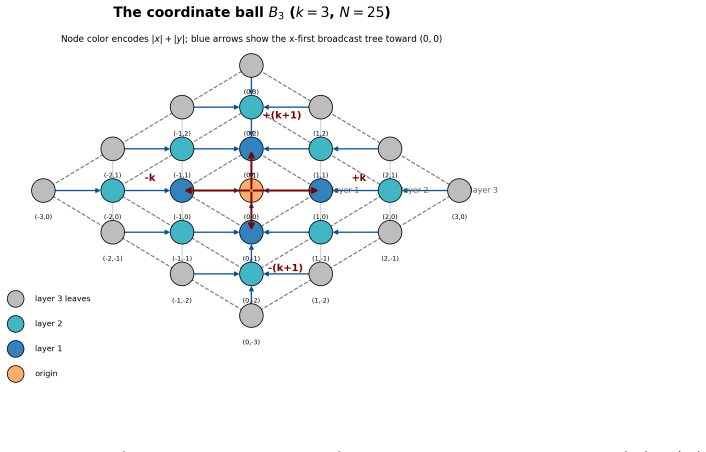
Dense Gaussian networks are degree-four algebraic networks with compact diameter and coordinate-based routing. Their diameter-level broadcast trees are efficient but fragile under node, link, and runtime-discovered faults. This paper develops a runtime recovery framework for dense Gaussian broadcast networks under static node/link faults and mixed faults, plus single-link faults discovered live. The method re-roots the source so known node faults become boundary leaves whenever possible, then filters failed links and repairs gaps by connecting healthy components of the pruned tree. For a selected root with connected healthy component graph, we prove exactly $c-1$ external repair edges are necessary and sufficient. We also prove deterministic single-link repair, give a constant-size boundary-intersection primitive for source selection, derive a link-avoidance exclusion test, and add a local-obstruction bound explaining why high-order cuts vanish as $k$ grows. Experiments over $k\in\{10,25,50,100,200\}$, up to $80{,}401$ nodes, $280{,}000$ static trials, and $15{,}000$ transient trials show 100\% recovery for deterministic and bounded regimes, $99.998\%$ for multi-link faults, and $99.963\%$ for heuristic regimes; non-recovered trials are explained by disconnected components or relocation failure. Re-rooting reduces average repair edges by 80--100\% versus fixed-source repair. Patched Gaussian-link Noxim replays confirm packet-complete execution and show re-rooting reduces repair edges, components, and depth. A completion-cycle audit separates repair benefit from latency: ablations confirm completion time depends on relocation, scheduling, delivery tail, and selector objective, so the paper claims edge-minimum repair rather than universal completion-cycle dominance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a re-rooting-assisted runtime repair framework for node, link, and mixed faults in dense Gaussian broadcast networks. It re-roots the broadcast source so that known faults become boundary leaves when possible, then connects healthy components of the pruned tree using external repair edges. For a root selected such that the healthy-component meta-graph remains connected, the paper proves that exactly c-1 repair edges are necessary and sufficient; it also supplies a constant-size boundary-intersection primitive for source selection, a link-avoidance exclusion test, a local-obstruction bound, and deterministic single-link repair. Experiments on networks up to 80,401 nodes report 100% recovery in deterministic regimes and 99.963–99.998% overall, with non-recovery cases attributed to disconnected components or relocation failure; re-rooting reduces repair edges by 80–100% versus fixed-source repair.
Significance. If the c-1 bound and the connectedness guarantee of the boundary-intersection primitive hold, the result supplies a clean, parameter-free repair bound for algebraic networks together with extensive experimental validation (280k static + 15k transient trials) and packet-level Noxim confirmation. The explicit separation of repair benefit from completion-cycle latency and the ablation of relocation, scheduling, and selector effects are also positive features.
major comments (2)
- [Abstract / c-1 theorem] Abstract and the c-1 theorem statement: the sufficiency direction ('exactly c-1 external repair edges are necessary and sufficient') is conditioned on the healthy-component meta-graph being connected after root selection. The boundary-intersection primitive is described as constant-size, yet no separate lemma establishes that it always produces a connected meta-graph for every admissible fault pattern. Experiments explicitly attribute a non-zero fraction of failures to disconnected components, confirming the premise is not universally satisfied.
- [Deterministic repair section] The deterministic single-link repair claim and the link-avoidance exclusion test are presented as unconditional, but their interaction with the root-selection primitive is not shown to preserve the connectedness premise required by the c-1 result; a counter-example or proof obligation for the combined procedure is missing.
minor comments (2)
- Notation for the healthy-component meta-graph and the parameter c should be introduced with a single forward reference rather than repeated inline definitions.
- Table captions for the recovery-rate tables should explicitly state the failure model (static node, static link, mixed, transient) and the precise definition of 'recovery' used in each row.
Simulated Author's Rebuttal
We thank the referee for the careful reading and for highlighting points where the conditional nature of our results and the interactions between primitives could be clarified. We respond to each major comment below.
read point-by-point responses
-
Referee: [Abstract / c-1 theorem] Abstract and the c-1 theorem statement: the sufficiency direction ('exactly c-1 external repair edges are necessary and sufficient') is conditioned on the healthy-component meta-graph being connected after root selection. The boundary-intersection primitive is described as constant-size, yet no separate lemma establishes that it always produces a connected meta-graph for every admissible fault pattern. Experiments explicitly attribute a non-zero fraction of failures to disconnected components, confirming the premise is not universally satisfied.
Authors: The c-1 theorem is explicitly stated as conditional on the healthy-component meta-graph remaining connected after root selection; this condition appears in both the theorem and the surrounding text. The boundary-intersection primitive is a constant-size source-selection method whose purpose is to turn known faults into boundary leaves when possible; the manuscript does not claim or prove that this primitive guarantees a connected meta-graph for every admissible fault pattern. The experimental section already attributes non-recovery cases to disconnected components, which is consistent with the conditional statement. We will revise the abstract and the theorem statement to foreground the connectedness premise more prominently. revision: yes
-
Referee: [Deterministic repair section] The deterministic single-link repair claim and the link-avoidance exclusion test are presented as unconditional, but their interaction with the root-selection primitive is not shown to preserve the connectedness premise required by the c-1 result; a counter-example or proof obligation for the combined procedure is missing.
Authors: The deterministic single-link repair is proven under the standing assumption that a root has already been chosen so that the healthy-component graph is connected. The link-avoidance exclusion test is a local filter applied during repair-edge selection. The manuscript does not contain an explicit combined proof that the boundary-intersection primitive plus the exclusion test always preserves the connectedness premise. We will add a clarifying paragraph in the deterministic-repair section that restates the assumption and either supplies a short proof sketch for the single-link case or notes the open interaction obligation. revision: partial
Circularity Check
No significant circularity detected in derivation chain
full rationale
The paper explicitly conditions its central c-1 repair-edge theorem on the premise that a root can be selected such that the healthy component graph remains connected. This is presented as an assumption in the theorem statement, with a separate constant-size boundary-intersection primitive supplied for source selection. No quoted text shows the connectedness guarantee reducing to the theorem by construction, nor any fitted parameter renamed as prediction, self-citation load-bearing the core claim, or ansatz smuggled via prior work. The result is framed as a graph-theoretic necessity/sufficiency argument under the stated condition, with experiments separately reporting non-recovery cases due to disconnected components. This is a standard conditional proof structure that remains self-contained against external graph benchmarks and does not reduce the claimed derivation to its inputs.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Dense Gaussian networks are degree-four algebraic networks with compact diameter and coordinate-based routing.
- domain assumption A root exists such that the healthy component graph is connected after removing known faults.
Reference graph
Works this paper leans on
-
[1]
A group-theoretic model for symmetric intercon- nection networks,
S. B. Akers and B. Krishnamurthy, “A group-theoretic model for symmetric intercon- nection networks,”IEEE Transactions on Computers, vol. 38, no. 4, pp. 555–566, 1989. 30
1989
-
[2]
F. T. Leighton,Introduction to Parallel Algorithms and Architectures: Arrays, Trees, Hypercubes. Morgan Kaufmann, 1992
1992
-
[3]
W. J. Dally and B. Towles,Principles and Practices of Interconnection Networks. Mor- gan Kaufmann, 2004
2004
-
[4]
Duato, S
J. Duato, S. Yalamanchili, and L. Ni,Interconnection Networks: An Engineering Ap- proach. Morgan Kaufmann, 2003
2003
-
[5]
Grama, A
A. Grama, A. Gupta, G. Karypis, and V. Kumar,Introduction to Parallel Computing, 2nd ed. Addison-Wesley, 2003
2003
-
[6]
Dense Gaussian networks: Suitable topologies for on-chip multiprocessors,
C. Martinez, E. Vallejo, R. Beivide, C. Izu, and M. Moreto, “Dense Gaussian networks: Suitable topologies for on-chip multiprocessors,”International Journal of Parallel Pro- gramming, vol. 34, no. 3, pp. 193–211, 2006
2006
-
[7]
Modeling toroidal networks with the Gaussian integers,
C. Martinez, R. Beivide, E. Stafford, M. Moreto, and E. M. Gabidulin, “Modeling toroidal networks with the Gaussian integers,”IEEE Transactions on Computers, vol. 57, no. 8, pp. 1046–1056, 2008
2008
-
[8]
The topology of Gaussian and Eisenstein–Jacobi interconnec- tion networks,
M. Flahive and B. Bose, “The topology of Gaussian and Eisenstein–Jacobi interconnec- tion networks,”IEEE Transactions on Parallel and Distributed Systems, vol. 21, no. 8, pp. 1132–1142, 2010
2010
-
[9]
One-to-many node-disjoint paths routing in dense Gaussian networks,
O. Alsaleh, B. Bose, and B. Hamdaoui, “One-to-many node-disjoint paths routing in dense Gaussian networks,”The Computer Journal, 2013
2013
-
[10]
Routing algorithms in opti- mal degree-four circulant networks based on relative addressing: Comparative analysis for networks-on-chip,
E. A. Monakhova, O. G. Monakhov, and A. Y. Romanov, “Routing algorithms in opti- mal degree-four circulant networks based on relative addressing: Comparative analysis for networks-on-chip,”IEEE Transactions on Network Science and Engineering, vol. 10, no. 1, pp. 413–425, 2023
2023
-
[11]
Development of routing algorithms in networks-on-chip based on two-dimensional optimal circulant topologies,
A. Y. Romanov, E. V. Lezhnev, A. Y. Glukhikh, and A. A. Amerikanov, “Development of routing algorithms in networks-on-chip based on two-dimensional optimal circulant topologies,”Heliyon, vol. 6, no. 1, 2020
2020
-
[12]
Edge-disjoint Hamiltonian cycles in Gaussian networks,
B. A. Albader and B. Bose, “Edge-disjoint Hamiltonian cycles in Gaussian networks,” IEEE Transactions on Computers, vol. 65, no. 1, pp. 315–321, 2016
2016
-
[13]
The multi-tree approach to reliability in distributed networks,
A. Itai and M. Rodeh, “The multi-tree approach to reliability in distributed networks,” Information and Computation, vol. 79, no. 1, pp. 43–59, 1988
1988
-
[14]
Completely independent spanning trees in the underlying graph of a line digraph,
T. Hasunuma, “Completely independent spanning trees in the underlying graph of a line digraph,”Discrete Mathematics, vol. 234, no. 1–3, pp. 149–157, 2001
2001
-
[15]
Independent spanning trees in networks: A survey,
B. Cheng, J. Fan, X. Jia, and S. Zhang, “Independent spanning trees in networks: A survey,”The Computer Journal, vol. 64, no. 7, pp. 1003–1018, 2021. 31
2021
-
[16]
A survey of fault-tolerant network-on- chip architectures,
D. Kliazovich, F. Granelli, and D. Miorandi, “A survey of fault-tolerant network-on- chip architectures,”IEEE Communications Surveys & Tutorials, vol. 15, no. 4, pp. 1676–1690, 2013
2013
-
[17]
Pasricha and N
S. Pasricha and N. Dutt,On-Chip Communication Architectures: System on Chip In- terconnect. Morgan Kaufmann, 2008
2008
-
[18]
Flich and D
J. Flich and D. Bertozzi,Designing Network-on-Chip Architectures in the Nanoscale Era. CRC Press, 2010
2010
-
[19]
Fault-tolerant routing algorithm for 3D networks-on-chip,
M. Ebrahimi, M. Daneshtalab, P. Liljeberg, and H. Tenhunen, “Fault-tolerant routing algorithm for 3D networks-on-chip,” inProc. Design, Automation and Test in Europe, 2013
2013
-
[20]
Re-rooting-based fault-tolerant broad- casting in dense Gaussian networks,
B. A. Albader, M. R. Al-Mulla, and G. Hassan, “Re-rooting-based fault-tolerant broad- casting in dense Gaussian networks,” submitted manuscript, 2026
2026
-
[21]
Multi-orientation edge-minimum repair for non-redundant fault-tolerant broadcasting in dense Gaussian networks,
B. A. Albader, “Multi-orientation edge-minimum repair for non-redundant fault-tolerant broadcasting in dense Gaussian networks,” submitted manuscript, 2026. 32
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.