DexCompose: Reusing Dexterous Policies for Multi-Task Manipulation with a Single Hand
Pith reviewed 2026-06-29 03:47 UTC · model grok-4.3
The pith
DexCompose reuses pretrained dexterous policies for multi-task hand manipulation by determining finger ownership through release tests and training dual asymmetric residuals.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
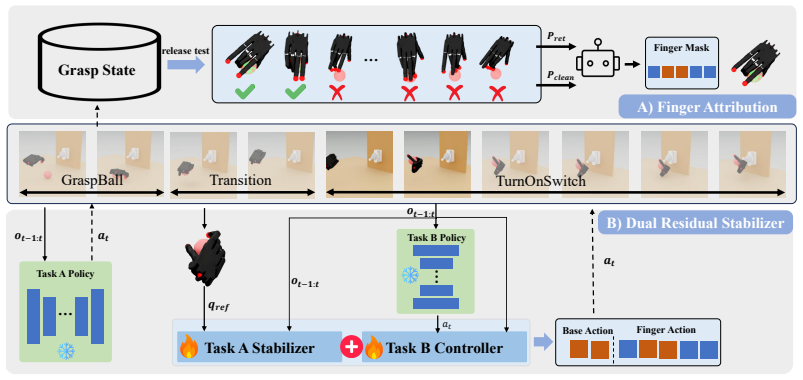
Given two pretrained full-hand policies, DexCompose collects successful post-task states from the first skill, runs release tests over candidate finger masks to identify fingers required for state preservation, and trains an asymmetric pair of residual modules: a bounded residual stabilizer that maintains the established skill and a context-aware residual that adapts the downstream policy only within its assigned action subspace. This finger-level ownership structure allows the composite policy to execute both tasks without the interference typical of direct chaining or joint fine-tuning.
What carries the argument
Role-aware residual composition that partitions the hand's action space via finger masks identified by release tests and applies one bounded preservation residual and one context-aware adaptation residual on frozen base policies.
If this is right
- Structural finger ownership combined with dual residuals enables reuse of existing dexterous policies for sequential multi-task execution.
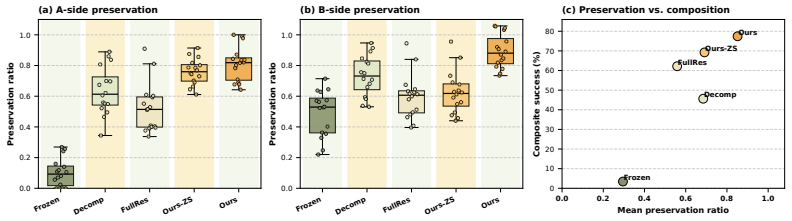
- The approach reaches 77.4 percent average success across 16 composite tasks spanning four object-retention skills and four downstream interactions.
- Explicit action ownership avoids the destructive interference that arises when overlapping fingers must satisfy both preservation and new-task demands simultaneously.
- Composition succeeds without retraining the full-hand policies from scratch.
Where Pith is reading between the lines
- The same ownership logic could be extended to longer task sequences if release tests are repeated after each new skill is added.
- If finger masks transfer from simulation to real hardware, the method would cut the data cost of learning each additional task.
- The dual-residual pattern may generalize to other high-dimensional control domains where subsystems must preserve prior constraints while accepting new commands.
- Dynamic re-assignment of fingers mid-execution would be a natural next test of whether the static masks identified here remain optimal once the second task begins.
Load-bearing premise
Release tests over candidate finger masks can reliably identify the fingers necessary for maintaining the first skill's state without missing interactions that matter for the second task.
What would settle it
An experiment in which the finger masks chosen by release tests produce composite success rates that fall below those of independently trained policies or of simple chaining baselines on the same 16 tasks.
Figures

read the original abstract
Dexterous manipulation policies can solve individual skills, but composing them to perform multiple tasks with a single hand remains challenging. Adding a new task on top of an existing manipulation skill often imposes conflicting demands on overlapping fingers and contact modes, causing destructive interference between preserving an existing manipulation outcome and executing a new one. We propose DexCompose, a role-aware residual composition framework that reuses pretrained dexterous policies for multi-task manipulation through explicit finger-level action ownership. Given two pretrained full-hand policies, DexCompose first collects successful post-task states from the first skill and performs release tests over candidate finger masks to identify which fingers are necessary for maintaining the established skill state. It then trains two asymmetric residual modules: a bounded residual stabilizer for task preservation, and a context-aware residual that adapts the frozen downstream policy only within the action subspace assigned to the new task. We evaluate the framework on 16 composite dexterous manipulation tasks spanning four object-retention skills and four downstream interactions. DexCompose achieves a 77.4% average composite success rate, demonstrating that structural action ownership with dual residuals offers a promising direction for composing dexterous skills beyond conventional policy chaining.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes DexCompose, a role-aware residual composition framework that reuses two pretrained full-hand dexterous policies for composite manipulation tasks. It collects successful post-task states from the first policy, uses release tests over candidate finger masks to assign explicit finger-level action ownership, and trains two asymmetric residual modules (a bounded stabilizer for task preservation and a context-aware residual for the new task) while keeping the original policies frozen. The framework is evaluated on 16 composite tasks (four object-retention skills plus four downstream interactions) and reports a 77.4% average composite success rate.
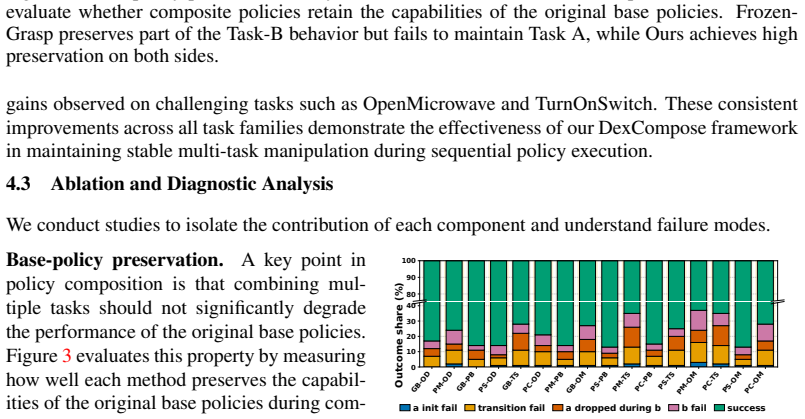
Significance. If the empirical results hold under rigorous controls, the work demonstrates a concrete mechanism for structural action ownership that mitigates destructive interference when composing dexterous skills, offering a reusable alternative to policy chaining or joint retraining.
major comments (2)
- [Method (release tests and finger ownership identification)] The central empirical claim of 77.4% average success rests on the release-test procedure for identifying finger ownership; the manuscript provides no details on how the post-task states are sampled, how many trials are run per mask, or how transient dynamics are ruled out as sources of false negatives, leaving the subspace assignment step unverified.
- [Experiments and Evaluation] The evaluation section reports the 77.4% figure on 16 tasks but supplies no baselines (e.g., policy chaining, joint fine-tuning), no per-task variance or confidence intervals, and no description of task-selection criteria or state-collection protocol, rendering the quantitative result difficult to interpret for robustness.
minor comments (2)
- [Abstract / Method] The abstract and method description would benefit from an explicit diagram or pseudocode showing the exact sequence of release-test masking, stabilizer training, and residual adaptation.
- [Method] Notation for the two residual modules (bounded stabilizer vs. context-aware residual) should be introduced with consistent symbols early in the method section to avoid later ambiguity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and will revise the manuscript to improve clarity and robustness where needed.
read point-by-point responses
-
Referee: [Method (release tests and finger ownership identification)] The central empirical claim of 77.4% average success rests on the release-test procedure for identifying finger ownership; the manuscript provides no details on how the post-task states are sampled, how many trials are run per mask, or how transient dynamics are ruled out as sources of false negatives, leaving the subspace assignment step unverified.
Authors: We agree that additional implementation details on the release-test procedure are necessary for full reproducibility and verification. In the revised manuscript, we will expand Section 3.2 to specify: post-task states are collected from 200 successful trajectories per retention skill (filtered by object stability criteria); 30 trials are executed per candidate finger mask; and transient dynamics are mitigated by requiring the object to remain within a velocity threshold for at least 5 consecutive timesteps before declaring a release. These additions will make the finger ownership assignment step verifiable. revision: yes
-
Referee: [Experiments and Evaluation] The evaluation section reports the 77.4% figure on 16 tasks but supplies no baselines (e.g., policy chaining, joint fine-tuning), no per-task variance or confidence intervals, and no description of task-selection criteria or state-collection protocol, rendering the quantitative result difficult to interpret for robustness.
Authors: We acknowledge these gaps in the evaluation. The revised version will include: (1) baselines for policy chaining (direct sequential execution) and joint fine-tuning of both policies on the composite tasks; (2) a table with per-task success rates and standard deviations computed over 5 random seeds; (3) explicit description of task-selection criteria (covering four retention skills and four interaction types drawn from standard dexterous manipulation benchmarks) and the state-collection protocol (running the first policy to completion and recording final states only on success). These changes will allow better assessment of robustness. revision: yes
Circularity Check
No circularity: empirical method with no self-referential derivations or fitted predictions
full rationale
The paper describes a procedural framework (collect post-task states, run release tests on finger masks, train two residual modules on frozen policies) evaluated empirically on 16 composite tasks yielding a 77.4% success rate. No equations, first-principles derivations, or predictions appear that reduce the reported outcome to a quantity defined by the method itself. No self-citations are invoked as load-bearing uniqueness theorems, and the central result is an external performance measurement rather than a tautological renaming or fit. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Y . Li, B. Liu, Y . Geng, P. Li, Y . Yang, Y . Zhu, T. Liu, and S. Huang. Grasp multiple objects with one hand.IEEE Robotics and Automation Letters, 9(5):4027–4034, 2024. doi:10.1109/ LRA.2024.3374190
arXiv 2024
-
[2]
Jiang, Y
H. Jiang, Y . Wu, Y . Wang, G. S. Sukhatme, and D. Seita. Concurrent prehensile and nonpre- hensile manipulation: A practical approach to multi-stage dexterous tasks, 2026
2026
-
[3]
Foong, Y
E. Foong, Y . Li, H. Jiang, G. S. Sukhatme, and D. Seita. HANDFUL: Sequential grasp- conditioned dexterous manipulation with resource awareness, 2026
2026
-
[4]
R. Wang, J. Zhang, J. Chen, Y . Xu, P. Li, T. Liu, and H. Wang. Dexgraspnet: A large-scale robotic dexterous grasp dataset for general objects based on simulation. In2023 IEEE Inter- national Conference on Robotics and Automation, pages 11359–11366, 2023
2023
-
[5]
Y . Xu, W. Wan, J. Zhang, H. Liu, Z. Shan, H. Shen, R. Wang, H. Geng, Y . Weng, J. Chen, T. Liu, L. Yi, and H. Wang. UniDexGrasp: Universal robotic dexterous grasping via learning diverse proposal generation and goal-conditioned policy. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 4737–4746, 2023
2023
-
[6]
W. Wan, H. Geng, Y . Liu, Z. Shan, Y . Yang, L. Yi, and H. Wang. UniDexGrasp++: Improving dexterous grasping policy learning via geometry-aware curriculum and iterative generalist- specialist learning. InProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pages 3891–3902, 2023
2023
-
[7]
Popov, N
I. Popov, N. Heess, T. Lillicrap, R. Hafner, G. Barth-Maron, M. Vecerik, T. Lampe, Y . Tassa, T. Erez, and M. Riedmiller. Data-efficient deep reinforcement learning for dexterous manipu- lation. InInternational Conference on Learning Representations, 2018
2018
-
[8]
Rajeswaran, V
A. Rajeswaran, V . Kumar, A. Gupta, G. Vezzani, J. Schulman, E. Todorov, and S. Levine. Learning complex dexterous manipulation with deep reinforcement learning and demonstra- tions. InProceedings of Robotics: Science and Systems (RSS), 2018
2018
-
[9]
OpenAI, M. Andrychowicz, B. Baker, M. Chociej, R. J ´ozefowicz, B. McGrew, J. Pachocki, A. Petron, M. Plappert, G. Powell, A. Ray, J. Schneider, S. Sidor, J. Tobin, P. Welinder, L. Weng, and W. Zaremba. Learning dexterous in-hand manipulation.The International Jour- nal of Robotics Research, 39(1):3–20, 2020. doi:10.1177/0278364919887447
-
[10]
I. Akkaya, M. Andrychowicz, M. Chociej, M. Litwin, B. McGrew, A. Petron, A. Paino, M. Plappert, G. Powell, R. Ribas, J. Schneider, N. Tezak, J. Tworek, P. Welinder, L. Weng, Q. Yuan, W. Zaremba, and L. Zhang. Solving rubik’s cube with a robot hand.arXiv preprint arXiv:1910.07113, 2019
Pith/arXiv arXiv 1910
-
[11]
Y . Qin, Y .-H. Wu, S. Liu, H. Jiang, R. Yang, Y . Fu, and X. Wang. Dexmv: Imitation learning for dexterous manipulation from human videos. InComputer Vision – ECCV 2022, pages 570–587. Springer, 2022. doi:10.1007/978-3-031-19842-7 33
-
[12]
Mandikal and K
P. Mandikal and K. Grauman. Dexvip: Learning dexterous grasping with human hand pose priors from video. InConference on Robot Learning, 2021
2021
-
[13]
S. P. Arunachalam, S. Silwal, B. Evans, and L. Pinto. Dexterous imitation made easy: A learning-based framework for efficient dexterous manipulation. In2023 IEEE International Conference on Robotics and Automation, 2023
2023
-
[14]
Jiang, Y
Z. Jiang, Y . Xie, K. Lin, Z. Xu, W. Wan, A. Mandlekar, L. Fan, and Y . Zhu. Dexmimicgen: Automated data generation for bimanual dexterous manipulation via imitation learning. In 2025 IEEE International Conference on Robotics and Automation, 2025. 15
2025
-
[15]
C. Chi, S. Feng, Y . Du, Z. Xu, E. Cousineau, B. Burchfiel, and S. Song. Diffusion policy: Visuomotor policy learning via action diffusion. InProceedings of Robotics: Science and Systems (RSS), 2023
2023
-
[16]
Y . Ze, G. Zhang, K. Zhang, C. Hu, M. Wang, and H. Xu. 3d diffusion policy: Generalizable visuomotor policy learning via simple 3d representations.arXiv preprint arXiv:2403.03954, 2024
Pith/arXiv arXiv 2024
-
[17]
Liang, Y
Z. Liang, Y . Mu, Y . Wang, T. Chen, W. Shao, W. Zhan, M. Tomizuka, P. Luo, and M. Ding. Dexhanddiff: Interaction-aware diffusion planning for adaptive dexterous manipulation. In Proceedings of the Computer Vision and Pattern Recognition Conference, pages 1745–1755, 2025
2025
-
[18]
C. Bao, H. Xu, Y . Qin, and X. Wang. DexArt: Benchmarking generalizable dexterous ma- nipulation with articulated objects. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 21190–21200, 2023
2023
-
[19]
Zhang, H
J. Zhang, H. Liu, D. Li, X. Yu, H. Geng, Y . Ding, J. Chen, and H. Wang. Dexgraspnet 2.0: Learning generative dexterous grasping in large-scale synthetic cluttered scenes. InProceed- ings of the 8th Conference on Robot Learning, volume 270 ofProceedings of Machine Learn- ing Research. PMLR, 2025
2025
-
[21]
Zhang, Q
G. Zhang, Q. Xu, H. Zhang, J. Ma, L. He, Y . Bao, Z. Ping, Z. Yuan, C. Lu, C. Yuan, et al. Unidex: A robot foundation suite for universal dexterous hand control from egocentric hu- man videos. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 1841–1852, 2026
2026
-
[22]
S. Zhao, X. Zhu, Y . Chen, C. Li, Y . Xie, X. Zhang, M. Ding, and M. Tomizuka. Dexh2r: Task-oriented dexterous manipulation from human to robots.IEEE/ASME Transactions on Mechatronics, 2025
2025
-
[23]
Y . Chen, C. Wang, L. Fei-Fei, and K. Liu. Sequential dexterity: Chaining dexterous policies for long-horizon manipulation. In J. Tan, M. Toussaint, and K. Darvish, editors,Proceedings of The 7th Conference on Robot Learning, volume 229 ofProceedings of Machine Learning Research, pages 3809–3829. PMLR, 2023
2023
-
[24]
S. Li, S. Li, Z. Wei, Y . Yao, C. Li, and M. Ding. Coordex: Coordinating body and hand pri- ors for continuous dexterous humanoid loco-manipulation.arXiv preprint arXiv:2602.16712, 2026
Pith/arXiv arXiv 2026
-
[25]
Pertsch, Y
K. Pertsch, Y . Lee, and J. J. Lim. Accelerating reinforcement learning with learned skill priors. InProceedings of the 2020 Conference on Robot Learning, volume 155 ofProceedings of Machine Learning Research, pages 188–204. PMLR, 2021
2020
-
[26]
Singh, H
A. Singh, H. Liu, G. Zhou, A. Yu, N. Rhinehart, and S. Levine. Parrot: Data-driven behavioral priors for reinforcement learning. InInternational Conference on Learning Representations, 2021
2021
-
[27]
Nasiriany, H
S. Nasiriany, H. Liu, and Y . Zhu. Augmenting reinforcement learning with behavior primi- tives for diverse manipulation tasks. In2022 IEEE International Conference on Robotics and Automation, pages 7477–7484, 2022
2022
-
[28]
Nasiriany, T
S. Nasiriany, T. Gao, A. Mandlekar, and Y . Zhu. Learning and retrieval from prior data for skill- based imitation learning. InProceedings of the 6th Conference on Robot Learning, volume 205 ofProceedings of Machine Learning Research, pages 2181–2204. PMLR, 2023. 16
2023
-
[29]
S. He, Z. Shangguan, K. Wang, Y . Gu, Y . Fu, Y . Fu, and D. Seita. Sequential multi-object grasping with one dexterous hand.arXiv preprint arXiv:2503.09078, 2025
arXiv 2025
-
[30]
H. Lu, Y . Dong, Z. Weng, F. T. Pokorny, J. Lundell, and D. Kragic. Grasping a handful: Sequential multi-object dexterous grasp generation.IEEE Robotics and Automation Letters, 10(11):11880–11887, 2025. doi:10.1109/LRA.2025.3614051
-
[31]
T. Silver, K. Allen, J. Tenenbaum, and L. Kaelbling. Residual policy learning.arXiv preprint arXiv:1812.06298, 2018
Pith/arXiv arXiv 2018
-
[32]
Ranjbar, N
A. Ranjbar, N. A. Vien, H. Ziesche, J. Boedecker, and G. Neumann. Residual feedback learning for contact-rich manipulation tasks with uncertainty. In2021 IEEE/RSJ International Confer- ence on Intelligent Robots and Systems, pages 2383–2390, 2021
2021
-
[33]
Y . Shi, Z. Chen, H. Liu, S. Riedel, C. Gao, Q. Feng, J. Deng, and J. Zhang. Proactive action visual residual reinforcement learning for contact-rich tasks using a torque-controlled robot. In2021 IEEE International Conference on Robotics and Automation, pages 765–771, 2021
2021
-
[34]
T. Johannink, S. Bahl, A. Nair, J. Luo, A. Kumar, M. Loskyll, J. A. Ojea, E. Solowjow, and S. Levine. Residual reinforcement learning for robot control. In2019 International Conference on Robotics and Automation (ICRA), pages 6023–6029. IEEE, 2019. doi:10.1109/ICRA.2019. 8794127
-
[35]
Schaff and M
C. Schaff and M. R. Walter. Residual policy learning for shared autonomy. InProceedings of Robotics: Science and Systems (RSS), 2020
2020
-
[36]
M. Alakuijala, G. Dulac-Arnold, J. Mairal, J. Ponce, and C. Schmid. Residual reinforcement learning from demonstrations.arXiv preprint arXiv:2106.08050, 2021
arXiv 2021
-
[37]
C. Chi, B. Burchfiel, E. Cousineau, S. Feng, and S. Song. Iterative residual policy for goal- conditioned dynamic manipulation of deformable objects. InProceedings of Robotics: Science and Systems (RSS), 2022
2022
-
[38]
K. Rana, M. Xu, B. Tidd, M. Milford, and N. S ¨underhauf. Residual skill policies: Learning an adaptable skill-based action space for reinforcement learning for robotics. InProceedings of the 6th Conference on Robot Learning, volume 205 ofProceedings of Machine Learning Research, pages 2095–2104. PMLR, 2023
2095
-
[39]
L. L. Ankile, A. Simeonov, I. Shenfeld, M. Torne, and P. Agrawal. From imitation to refine- ment: Residual rl for precise assembly. In2025 IEEE International Conference on Robotics and Automation, 2025
2025
-
[40]
K. Li, P. Li, T. Liu, Y . Li, and S. Huang. Maniptrans: Efficient dexterous bimanual manipula- tion transfer via residual learning.arXiv preprint arXiv:2503.21860, 2025
arXiv 2025
-
[41]
Isaac lab, 2024
NVIDIA. Isaac lab, 2024. URLhttps://github.com/isaac-sim/IsaacLab. Robotics reinforcement learning and simulation framework built on NVIDIA Isaac Sim
2024
-
[42]
Shadow dexterous hand, 2024
Shadow Robot Company. Shadow dexterous hand, 2024. URLhttps://www.shadowrobot. com/dexterous-hand-series/. 24-DoF anthropomorphic robotic hand platform
2024
-
[43]
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov. Proximal policy optimization algorithms.arXiv preprint arXiv:1707.06347, 2017. 17
Pith/arXiv arXiv 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.