HSDF-Lane: Height-Aligned Signed Distance Field with Semantic Lane Prior for 3D Lane Detection
Pith reviewed 2026-07-01 06:24 UTC · model grok-4.3
The pith
HSDF-Lane implicitly models road surfaces as height-aligned signed distance fields to recover accurate 3D lane geometry and height maps from monocular images.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
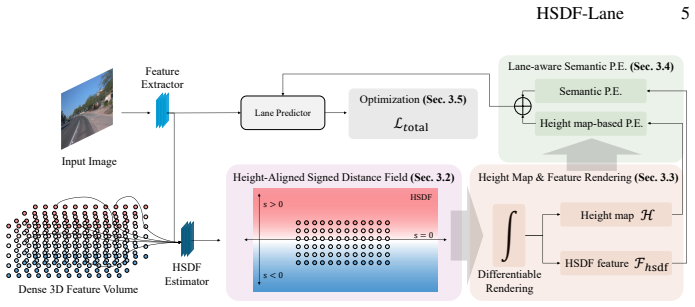
HSDF-Lane implicitly models the road surface as a Height-aligned Signed Distance Field over a densely sampled 3D feature volume. Through differentiable rendering, this produces an accurate height map and surface-aligned features. The Lane-aware Semantic Positional Encoding injects a lane-existence prior from these features into the transformer queries, coupling geometry with semantic guidance and achieving state-of-the-art performance in 3D lane detection and height map estimation on OpenLane.
What carries the argument
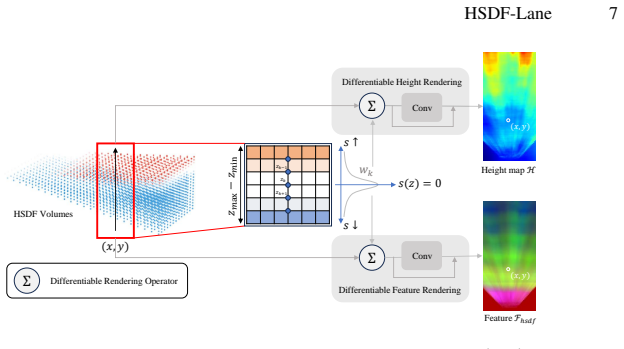
The Height-aligned Signed Distance Field (HSDF), an implicit representation of the road surface in a 3D volume that enables differentiable rendering for height maps and aligned features.
If this is right
- Produces both height maps and semantic features from the same implicit model without separate explicit regressions.
- Integrates geometric structure directly with lane semantic priors in the detection transformer.
- Avoids flat-ground assumptions that distort geometry on real roads.
- Delivers improved accuracy in both 3D lane detection and height estimation on standard benchmarks.
Where Pith is reading between the lines
- This modeling could extend to estimating other surface properties like curvature or friction in driving scenes.
- Replacing explicit height regression with implicit fields might simplify architectures for other monocular 3D tasks.
- Testing the approach on datasets with more varied road conditions would reveal robustness beyond OpenLane.
- The semantic prior injection might generalize to other query-based detectors in vision.
Load-bearing premise
Differentiable rendering of the HSDF over a densely sampled 3D volume produces accurate artifact-free height maps and useful surface-aligned features without needing extra regularization or post-processing.
What would settle it
If an ablation study or comparison on OpenLane shows that removing the HSDF or LSPE causes the 3D lane detection metrics to fall below those of prior explicit height map methods, or if the estimated height maps have higher errors than reported.
Figures



read the original abstract
Monocular 3D lane detection plays a critical role in autonomous driving, yet recovering reliable 3D geometry from a single image remains challenging due to inherent depth ambiguity. Prior methods project image features into Bird's-Eye-View (BEV) space under a flat-ground assumption, causing geometric distortion on real-world roads. Recent methods instead predict explicit height maps to capture non-planar surfaces, but still rely on sparse anchor-based regression and exploit the recovered geometry merely for spatial transformation rather than semantic understanding. To overcome these limitations, we propose HSDF-Lane, which implicitly models the road surface as a Height-aligned Signed Distance Field (HSDF) over a densely sampled 3D feature volume. Through differentiable rendering, the HSDF jointly produces an accurate height map and surface-aligned features. We further introduce Lane-aware Semantic Positional Encoding (LSPE), which injects a lane-existence prior derived from the surface-aligned features into the transformer queries, coupling geometric structure with semantic guidance. Extensive experiments on the OpenLane benchmark show that HSDF-Lane achieves state-of-the-art performance in both 3D lane detection and height map estimation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that monocular 3D lane detection can be improved by implicitly modeling the road surface as a Height-aligned Signed Distance Field (HSDF) over a densely sampled 3D feature volume. Differentiable rendering of this HSDF jointly yields an accurate height map and surface-aligned features, while a new Lane-aware Semantic Positional Encoding (LSPE) injects lane-existence priors derived from those features into transformer queries. Experiments on the OpenLane benchmark are reported to achieve state-of-the-art results in both 3D lane detection and height map estimation.
Significance. If the central claims hold, the work would advance monocular 3D lane detection by replacing flat-ground BEV projections and sparse anchor regression with an implicit field that couples geometry and semantics through differentiable rendering. The LSPE mechanism that feeds surface-aligned features back as semantic priors is a potentially useful idea for reducing depth ambiguity on non-planar roads.
major comments (1)
- [Abstract] Abstract: The central claim that differentiable rendering of the HSDF over a densely sampled 3D volume simultaneously produces accurate height maps and semantically useful surface-aligned features without artifacts rests on an unverified assumption. No equations, sampling strategy, or regularization terms for the rendering operator or height-map loss are provided, leaving open whether reported OpenLane height-map accuracy is an artifact of the method or of unstated implementation choices.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The concern regarding missing methodological details is valid and will be addressed through revisions that add the requested equations and descriptions.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that differentiable rendering of the HSDF over a densely sampled 3D volume simultaneously produces accurate height maps and semantically useful surface-aligned features without artifacts rests on an unverified assumption. No equations, sampling strategy, or regularization terms for the rendering operator or height-map loss are provided, leaving open whether reported OpenLane height-map accuracy is an artifact of the method or of unstated implementation choices.
Authors: We agree that the abstract's claims would benefit from explicit supporting details to avoid any ambiguity. The current manuscript describes the HSDF and differentiable rendering at a high level in Section 3 but does not include the full set of equations for the rendering operator, the precise 3D sampling strategy, or the regularization terms in the height-map loss. In the revised version we will insert these equations (including the SDF evaluation and volume rendering formulation), the sampling procedure, and the loss regularization terms directly into the method section, with a brief pointer added to the abstract. This will make the source of the reported height-map accuracy fully verifiable from the text. revision: yes
Circularity Check
No circularity: claims rest on benchmark results without self-referential definitions or fitted inputs renamed as predictions
full rationale
The provided abstract and description describe a method using implicit HSDF modeling and differentiable rendering to produce height maps and features, plus LSPE for semantic guidance, with performance evaluated on the OpenLane benchmark. No equations, derivations, or self-citations are shown that reduce any claimed result to a fitted parameter, self-definition, or prior author work by construction. The central claims are externally falsifiable via benchmark metrics rather than internally forced by the method's own inputs. This is the expected non-finding for a methods paper whose novelty is presented at the architectural level without load-bearing self-referential steps.
Axiom & Free-Parameter Ledger
invented entities (2)
-
Height-aligned Signed Distance Field (HSDF)
no independent evidence
-
Lane-aware Semantic Positional Encoding (LSPE)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
arXiv preprint arXiv:2209.07989 (2022)
Bai, Y ., Chen, Z., Fu, Z., Peng, L., Liang, P., Cheng, E.: Curveformer: 3d lane detection by curve propagation with curve queries and attention. arXiv preprint arXiv:2209.07989 (2022)
-
[2]
In: Proceedings of the Computer Vision and Pattern Recognition Conference
Chang, Y ., Huang, J., Wang, X., Ye, Y ., Liang, Z., Shan, Y ., Du, D., Wang, X.: Rethinking lanes and points in complex scenarios for monocular 3d lane detection. In: Proceedings of the Computer Vision and Pattern Recognition Conference. pp. 6802–6811 (2025)
2025
-
[3]
In: European Conference on Computer Vision
Chen, L., Sima, C., Li, Y ., Zheng, Z., Xu, J., Geng, X., Li, H., He, C., Shi, J., Qiao, Y ., et al.: Persformer: 3d lane detection via perspective transformer and the openlane benchmark. In: European Conference on Computer Vision. pp. 550–567. Springer (2022)
2022
-
[4]
Remote Sensing16(2), 295 (2024)
Chen, Z., Zhang, Y ., Qi, X., Mao, Y ., Zhou, X., Wang, L., Ge, Y .: Heightformer: A multi- level interaction and image-adaptive classification–regression network for monocular height estimation with aerial images. Remote Sensing16(2), 295 (2024)
2024
-
[5]
In: Proceedings of the IEEE/CVF international conference on computer vision
Duan, K., Bai, S., Xie, L., Qi, H., Huang, Q., Tian, Q.: Centernet: Keypoint triplets for object detection. In: Proceedings of the IEEE/CVF international conference on computer vision. pp. 6569–6578 (2019)
2019
-
[6]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Feng, Z., Guo, S., Tan, X., Xu, K., Wang, M., Ma, L.: Rethinking efficient lane detection via curve modeling. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 17062–17070 (2022)
2022
-
[7]
In: Proceedings of the IEEE/CVF International Conference on Computer Vision
Garnett, N., Cohen, R., Pe’er, T., Lahav, R., Levi, D.: 3d-lanenet: end-to-end 3d multiple lane detection. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. pp. 2921–2930 (2019)
2019
-
[8]
In: proceedings of the european conference on computer vision (ECCV) Workshops
Ghafoorian, M., Nugteren, C., Baka, N., Booij, O., Hofmann, M.: El-gan: Embedding loss driven generative adversarial networks for lane detection. In: proceedings of the european conference on computer vision (ECCV) Workshops. pp. 0–0 (2018)
2018
-
[9]
arXiv preprint arXiv:2002.10099 (2020)
Gropp, A., Yariv, L., Haim, N., Atzmon, M., Lipman, Y .: Implicit geometric regularization for learning shapes. arXiv preprint arXiv:2002.10099 (2020)
-
[10]
In: European Conference on Computer Vision
Guo, Y ., Chen, G., Zhao, P., Zhang, W., Miao, J., Wang, J., Choe, T.E.: Gen-lanenet: A gen- eralized and scalable approach for 3d lane detection. In: European Conference on Computer Vision. pp. 666–681. Springer (2020)
2020
-
[11]
In: Pro- ceedings of the IEEE conference on computer vision and pattern recognition
He, K., Zhang, X., Ren, S., Sun, J.: Deep residual learning for image recognition. In: Pro- ceedings of the IEEE conference on computer vision and pattern recognition. pp. 770–778 (2016)
2016
-
[12]
In: Proceedings of the IEEE/CVF international conference on computer vision
Hou, Y ., Ma, Z., Liu, C., Loy, C.C.: Learning lightweight lane detection cnns by self attention distillation. In: Proceedings of the IEEE/CVF international conference on computer vision. pp. 1013–1021 (2019)
2019
-
[13]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Huang, S., Shen, Z., Huang, Z., Ding, Z.h., Dai, J., Han, J., Wang, N., Liu, S.: Anchor3dlane: Learning to regress 3d anchors for monocular 3d lane detection. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 17451–17460 (2023)
2023
-
[14]
An Empirical Evaluation of Deep Learning on Highway Driving
Huval, B., Wang, T., Tandon, S., Kiske, J., Song, W., Pazhayampallil, J., Andriluka, M., Rajpurkar, P., Migimatsu, T., Cheng-Yue, R., et al.: An empirical evaluation of deep learning on highway driving. arXiv preprint arXiv:1504.01716 (2015) 16 Boo et al
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[15]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Jin, D., Park, W., Jeong, S.G., Kwon, H., Kim, C.S.: Eigenlanes: Data-driven lane descriptors for structurally diverse lanes. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 17163–17171 (2022)
2022
-
[16]
Kirillov, A., Mintun, E., Ravi, N., Mao, H., Rolland, C., Gustafson, L., Xiao, T., White- head, S., Berg, A.C., Lo, W.Y ., Dollár, P., Girshick, R.: Segment anything. arXiv:2304.02643 (2023)
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[17]
IEEE Transactions on Intelligent Transportation Systems23(7), 8949–8958 (2021)
Ko, Y ., Lee, Y ., Azam, S., Munir, F., Jeon, M., Pedrycz, W.: Key points estimation and point instance segmentation approach for lane detection. IEEE Transactions on Intelligent Transportation Systems23(7), 8949–8958 (2021)
2021
-
[18]
In: Proceedings of the IEEE international conference on computer vision
Lee, S., Kim, J., Shin Yoon, J., Shin, S., Bailo, O., Kim, N., Lee, T.H., Seok Hong, H., Han, S.H., So Kweon, I.: Vpgnet: Vanishing point guided network for lane and road marking detection and recognition. In: Proceedings of the IEEE international conference on computer vision. pp. 1947–1955 (2017)
1947
-
[19]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Li, C., Shi, J., Wang, Y ., Cheng, G.: Reconstruct from top view: A 3d lane detection ap- proach based on geometry structure prior. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 4370–4379 (2022)
2022
-
[20]
IEEE Transactions on Intelligent Transportation Systems21(1), 248–258 (2019)
Li, X., Li, J., Hu, X., Yang, J.: Line-cnn: End-to-end traffic line detection with line proposal unit. IEEE Transactions on Intelligent Transportation Systems21(1), 248–258 (2019)
2019
-
[21]
IEEE Robotics and Automation Letters 9(11), 10487–10494 (2024)
Li, Z., Han, C., Ge, Z., Yang, J., Yu, E., Wang, H., Zhang, X., Zhao, H.: Grouplane: End-to- end 3d lane detection with channel-wise grouping. IEEE Robotics and Automation Letters 9(11), 10487–10494 (2024)
2024
-
[22]
In: Proceedings of the IEEE conference on computer vision and pattern recognition
Lin, T.Y ., Dollár, P., Girshick, R., He, K., Hariharan, B., Belongie, S.: Feature pyramid net- works for object detection. In: Proceedings of the IEEE conference on computer vision and pattern recognition. pp. 2117–2125 (2017)
2017
-
[23]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Liu, L., Wang, B., Xie, H., Liu, D., Liu, L., Tian, Z., Yang, K., Wang, B.: Surroundsdf: Implicit 3d scene understanding based on signed distance field. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 21614–21623 (2024)
2024
-
[24]
In: Proceedings of the IEEE/CVF winter conference on applications of computer vision
Liu, R., Yuan, Z., Liu, T., Xiong, Z.: End-to-end lane shape prediction with transformers. In: Proceedings of the IEEE/CVF winter conference on applications of computer vision. pp. 3694–3702 (2021)
2021
-
[25]
arXiv preprint arXiv:2505.13266 (2025)
Liu, Y ., Xu, X., Wang, Z., Yao, Y .: Db3d-l: Depth-aware bev feature transformation for ac- curate 3d lane detection. arXiv preprint arXiv:2505.13266 (2025)
-
[26]
In: Proceedings of the IEEE/CVF international conference on computer vision
Liu, Y ., Yan, J., Jia, F., Li, S., Gao, A., Wang, T., Zhang, X.: Petrv2: A unified framework for 3d perception from multi-camera images. In: Proceedings of the IEEE/CVF international conference on computer vision. pp. 3262–3272 (2023)
2023
-
[27]
arXiv preprint arXiv:2406.16072 (2024)
Luo, Y ., Cui, S., Li, Z.: Dv-3dlane: End-to-end multi-modal 3d lane detection with dual-view representation. arXiv preprint arXiv:2406.16072 (2024)
-
[28]
In: Proceedings of the IEEE/CVF International Conference on Computer Vision
Luo, Y ., Zheng, C., Yan, X., Kun, T., Zheng, C., Cui, S., Li, Z.: Latr: 3d lane detection from monocular images with transformer. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. pp. 7941–7952 (2023)
2023
-
[29]
arXiv preprint arXiv:2504.18325 (2025)
Lyu, D., Huang, H., Tan, C., Li, Z.: Depth3dlane: Monocular 3d lane detection via depth prior distillation. arXiv preprint arXiv:2504.18325 (2025)
-
[30]
Communications of the ACM65(1), 99–106 (2021)
Mildenhall, B., Srinivasan, P.P., Tancik, M., Barron, J.T., Ramamoorthi, R., Ng, R.: Nerf: Representing scenes as neural radiance fields for view synthesis. Communications of the ACM65(1), 99–106 (2021)
2021
-
[31]
In: 2018 IEEE intelligent vehicles symposium (IV)
Neven, D., De Brabandere, B., Georgoulis, S., Proesmans, M., Van Gool, L.: Towards end- to-end lane detection: an instance segmentation approach. In: 2018 IEEE intelligent vehicles symposium (IV). pp. 286–291. IEEE (2018) HSDF-Lane 17
2018
-
[32]
˙I., Kalfao ˘glu, M.E., Kilinc, O.: Glane3d: Detecting lanes with graph of 3d key- points
Öztürk, H. ˙I., Kalfao ˘glu, M.E., Kilinc, O.: Glane3d: Detecting lanes with graph of 3d key- points. In: Proceedings of the Computer Vision and Pattern Recognition Conference. pp. 27508–27518 (2025)
2025
-
[33]
In: Proceedings of the AAAI conference on artificial intelligence
Pan, X., Shi, J., Luo, P., Wang, X., Tang, X.: Spatial as deep: Spatial cnn for traffic scene understanding. In: Proceedings of the AAAI conference on artificial intelligence. vol. 32 (2018)
2018
-
[34]
In: Proceedings of the IEEE/CVF International Conference on Computer Vision
Park, C., Seo, E., Hwang, J., Lim, J.: Sc-lane: Slope-aware and consistent road height es- timation framework for 3d lane detection. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. pp. 28407–28416 (2025)
2025
-
[35]
In: 2025 IEEE/CVF Winter Conference on Applications of Computer Vision (W ACV)
Park, C., Seo, E., Lim, J.: Heightlane: Bev heightmap guided 3d lane detection. In: 2025 IEEE/CVF Winter Conference on Applications of Computer Vision (W ACV). pp. 1692–
2025
-
[36]
In: European conference on computer vision
Philion, J., Fidler, S.: Lift, splat, shoot: Encoding images from arbitrary camera rigs by implicitly unprojecting to 3d. In: European conference on computer vision. pp. 194–210. Springer (2020)
2020
-
[37]
In: Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision
Pittner, M., Condurache, A., Janai, J.: 3d-splinenet: 3d traffic line detection using parametric spline representations. In: Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision. pp. 602–611 (2023)
2023
-
[38]
In: Proceedings of the IEEE/CVF Conference on computer vision and pattern recognition
Pittner, M., Janai, J., Condurache, A.P.: Lanecpp: Continuous 3d lane detection using phys- ical priors. In: Proceedings of the IEEE/CVF Conference on computer vision and pattern recognition. pp. 10639–10648 (2024)
2024
-
[39]
In: Proceedings of the IEEE/CVF International Conference on Computer Vision
Pittner, M., Janai, J., Faigle, M., Condurache, A.P.: Sparselanestp: Leveraging spatio- temporal priors with sparse transformers for 3d lane detection. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. pp. 29099–29109 (2025)
2025
-
[40]
In: International conference on computer aided systems theory
Pizzati, F., Allodi, M., Barrera, A., García, F.: Lane detection and classification using cas- caded cnns. In: International conference on computer aided systems theory. pp. 95–103. Springer (2019)
2019
-
[41]
In: 2025 IEEE/CVF Winter Conference on Applications of Computer Vision (W ACV)
Qiu, W., Pang, S., Zhang, H., Fang, J., Xue, J.: Heightmapnet: Explicit height modeling for end-to-end hd map learning. In: 2025 IEEE/CVF Winter Conference on Applications of Computer Vision (W ACV). pp. 6022–6031. IEEE (2025)
2025
-
[42]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Qu, Z., Jin, H., Zhou, Y ., Yang, Z., Zhang, W.: Focus on local: Detecting lane marker from bottom up via key point. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 14122–14130 (2021)
2021
-
[43]
arXiv preprint arXiv:2105.05403 (2021)
Su, J., Chen, C., Zhang, K., Luo, J., Wei, X., Wei, X.: Structure guided lane detection. arXiv preprint arXiv:2105.05403 (2021)
-
[44]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Sun, P., Kretzschmar, H., Dotiwalla, X., Chouard, A., Patnaik, V ., Tsui, P., Guo, J., Zhou, Y ., Chai, Y ., Caine, B., et al.: Scalability in perception for autonomous driving: Waymo open dataset. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 2446–2454 (2020)
2020
-
[45]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Tabelini, L., Berriel, R., Paixao, T.M., Badue, C., De Souza, A.F., Oliveira-Santos, T.: Keep your eyes on the lane: Real-time attention-guided lane detection. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 294–302 (2021)
2021
-
[46]
In: 2020 25th international confer- ence on pattern recognition (ICPR)
Tabelini, L., Berriel, R., Paixao, T.M., Badue, C., De Souza, A.F., Oliveira-Santos, T.: Poly- lanenet: Lane estimation via deep polynomial regression. In: 2020 25th international confer- ence on pattern recognition (ICPR). pp. 6150–6156. IEEE (2021)
2020
-
[47]
In: Proceedings of the IEEE/CVF conference on com- puter vision and pattern recognition
Wang, J., Ma, Y ., Huang, S., Hui, T., Wang, F., Qian, C., Zhang, T.: A keypoint-based global association network for lane detection. In: Proceedings of the IEEE/CVF conference on com- puter vision and pattern recognition. pp. 1392–1401 (2022)
2022
-
[48]
NeuS: Learning Neural Implicit Surfaces by Volume Rendering for Multi-view Reconstruction
Wang, P., Liu, L., Liu, Y ., Theobalt, C., Komura, T., Wang, W.: Neus: Learning neu- ral implicit surfaces by volume rendering for multi-view reconstruction. arXiv preprint arXiv:2106.10689 (2021) 18 Boo et al
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[49]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Wang, R., Qin, J., Li, K., Li, Y ., Cao, D., Xu, J.: Bev-lanedet: An efficient 3d lane detection based on virtual camera via key-points. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 1002–1011 (2023)
2023
-
[50]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Wang, W., Lu, Y ., Zheng, G., Zhan, S., Ye, X., Tan, Z., Wang, J., Wang, G., Li, X.: Bevspread: Spread voxel pooling for bird’s-eye-view representation in vision-based roadside 3d object detection. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 14718–14727 (2024)
2024
-
[51]
LaneNet: Real-Time Lane Detection Networks for Autonomous Driving
Wang, Z., Ren, W., Qiu, Q.: Lanenet: Real-time lane detection networks for autonomous driving. arXiv preprint arXiv:1807.01726 (2018)
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[52]
IEEE Transactions on Image Processing34, 689–700 (2024)
Wu, Y ., Li, R., Qin, Z., Zhao, X., Li, X.: Heightformer: Explicit height modeling without extra data for camera-only 3d object detection in bird’s eye view. IEEE Transactions on Image Processing34, 689–700 (2024)
2024
-
[53]
In: European Conference on Com- puter Vision
Xu, H., Wang, S., Cai, X., Zhang, W., Liang, X., Li, Z.: Curvelane-nas: Unifying lane- sensitive architecture search and adaptive point blending. In: European Conference on Com- puter Vision. pp. 689–704. Springer (2020)
2020
-
[54]
In: European conference on computer vision
Xu, S., Cai, X., Zhao, B., Zhang, L., Xu, H., Fu, Y ., Xue, X.: Rclane: Relay chain predic- tion for lane detection. In: European conference on computer vision. pp. 461–477. Springer (2022)
2022
-
[55]
In: Proceedings of the IEEE/CVF Confer- ence on Computer Vision and Pattern Recognition
Yan, F., Nie, M., Cai, X., Han, J., Xu, H., Yang, Z., Ye, C., Fu, Y ., Mi, M.B., Zhang, L.: Once- 3dlanes: Building monocular 3d lane detection. In: Proceedings of the IEEE/CVF Confer- ence on Computer Vision and Pattern Recognition. pp. 17143–17152 (2022)
2022
-
[56]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Yang, L., Yu, K., Tang, T., Li, J., Yuan, K., Wang, L., Zhang, X., Chen, P.: Bevheight: A robust framework for vision-based roadside 3d object detection. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 21611–21620 (2023)
2023
-
[57]
Advances in Neural Information Processing Systems37, 21875–21911 (2024)
Yang, L., Kang, B., Huang, Z., Zhao, Z., Xu, X., Feng, J., Zhao, H.: Depth anything v2. Advances in Neural Information Processing Systems37, 21875–21911 (2024)
2024
-
[58]
Ad- vances in neural information processing systems34, 4805–4815 (2021)
Yariv, L., Gu, J., Kasten, Y ., Lipman, Y .: V olume rendering of neural implicit surfaces. Ad- vances in neural information processing systems34, 4805–4815 (2021)
2021
-
[59]
arXiv preprint arXiv:2601.03252 (2026)
Yu, H., Lin, H., Wang, J., Li, J., Wang, Y ., Zhang, X., Wang, Y ., Zhou, X., Hu, R., Peng, S.: Infinidepth: Arbitrary-resolution and fine-grained depth estimation with neural implicit fields. arXiv preprint arXiv:2601.03252 (2026)
-
[60]
IEEE Transactions on Intelli- gent Transportation Systems (2025)
Zhang, Z., Sun, C., Wang, B., Guo, B., Wen, D., Zhu, T., Ning, Q.: Height3d: A roadside visual framework based on height prediction in real 3-d space. IEEE Transactions on Intelli- gent Transportation Systems (2025)
2025
-
[61]
In: Proceedings of the AAAI conference on artificial intelligence
Zheng, T., Fang, H., Zhang, Y ., Tang, W., Yang, Z., Liu, H., Cai, D.: Resa: Recurrent feature- shift aggregator for lane detection. In: Proceedings of the AAAI conference on artificial intelligence. vol. 35, pp. 3547–3554 (2021)
2021
-
[62]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Zheng, T., Huang, Y ., Liu, Y ., Tang, W., Yang, Z., Cai, D., He, X.: Clrnet: Cross layer refine- ment network for lane detection. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 898–907 (2022)
2022
-
[63]
In: Proceedings of the AAAI Conference on Artificial Intelligence
Zheng, Z., Zhang, X., Mou, Y ., Gao, X., Li, C., Huang, G., Pun, C.M., Yuan, X.: Pvalane: Prior-guided 3d lane detection with view-agnostic feature alignment. In: Proceedings of the AAAI Conference on Artificial Intelligence. vol. 38, pp. 7597–7604 (2024)
2024
-
[64]
In: 2025 IEEE/RSJ International Conference on In- telligent Robots and Systems (IROS)
Zhou, R., Li, J., Su, Z., Lu, C., Wang, Z.: Heightaware-bev: Height-aware feature mapping for efficient bird’s-eye-view perception. In: 2025 IEEE/RSJ International Conference on In- telligent Robots and Systems (IROS). pp. 6172–6178. IEEE (2025)
2025
-
[65]
Zou, Q., Jiang, H., Dai, Q., Yue, Y ., Chen, L., Wang, Q.: Robust lane detection from contin- uous driving scenes using deep neural networks. IEEE transactions on vehicular technology 69(1), 41–54 (2019) Supplementary Material for HSDF-Lane: Height-Aligned Signed Distance Field with Semantic Lane Prior for 3D Lane Detection Jiyong Boo , Byeongin Joung , H...
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.