Flatness-based Quadcopter Trajectory Planning and Tracking with Continuous-time Safety Guarantees
Pith reviewed 2026-05-24 12:18 UTC · model grok-4.3
The pith
Quadcopters can plan and track trajectories that satisfy all state and input constraints continuously in time through convex optimization.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
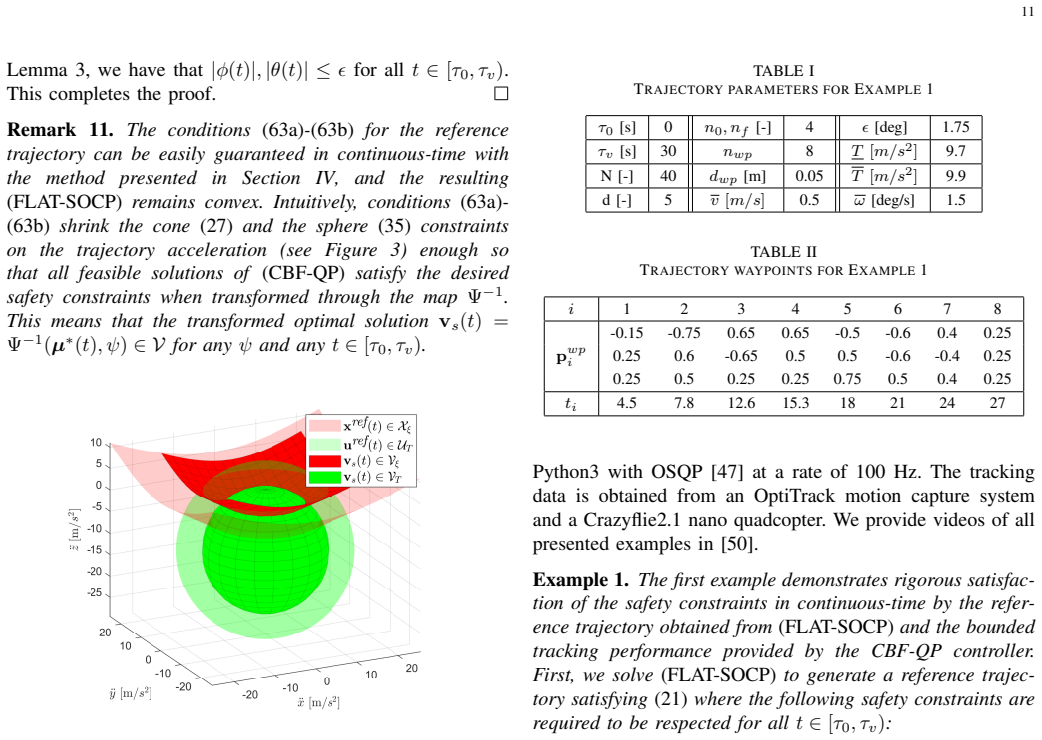
Using the differential flatness of quadcopters and B-spline basis functions, the work formulates a second-order cone program that produces trajectories respecting safe state and input constraints in continuous time. A quadratic program based on control barrier functions filters a nominal controller to ensure bounded tracking errors continuously, with a proof that this program remains feasible at all times. The framework also supplies conditions under which the filtered controller obeys thrust, roll angle, and pitch angle limits.
What carries the argument
B-spline parameterization under differential flatness, which converts continuous-time constraints into convex constraints for a second-order cone program, together with a control barrier function quadratic program that filters controllers while preserving feasibility.
If this is right
- Trajectories can be optimized while guaranteeing no constraint violation at any time.
- Tracking errors remain bounded without the safety filter ever failing to find a solution.
- Input constraints like thrust limits can be incorporated into the safe tracking controller.
- The method applies to real hardware as shown in flight tests.
Where Pith is reading between the lines
- The approach may reduce conservatism in planning by directly handling continuous constraints rather than discretizing.
- Similar techniques could apply to other vehicles with differential flatness, such as fixed-wing aircraft.
- Real-time replanning might become feasible if the programs solve quickly enough on embedded hardware.
- Integration with perception systems could enable online obstacle avoidance with the same guarantees.
Load-bearing premise
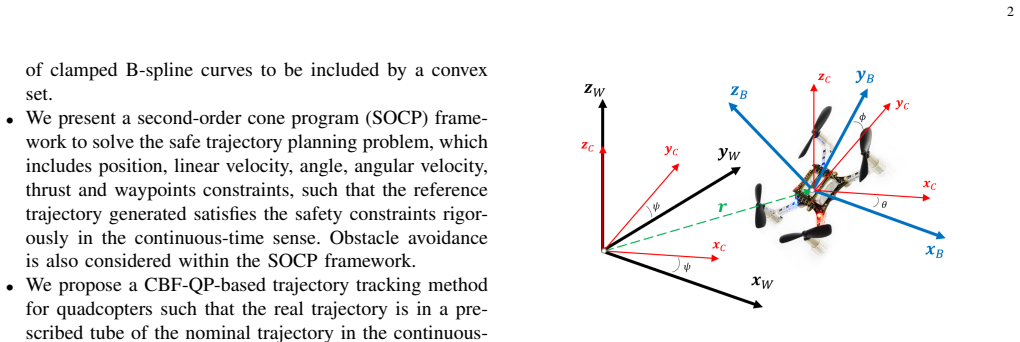
Quadcopters possess the differential flatness property that lets their full dynamics be recovered from position and yaw trajectories.
What would settle it
A case in which the quadratic program for tracking becomes infeasible or a continuous-time constraint is violated during closed-loop flight.
Figures

read the original abstract
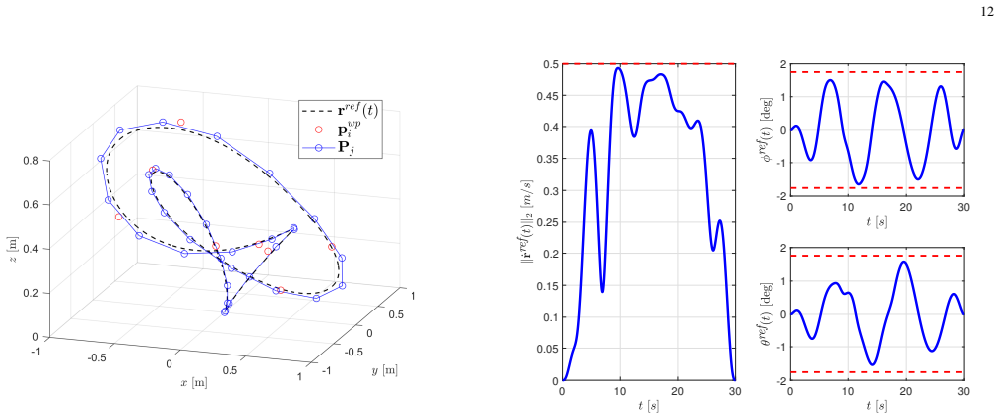
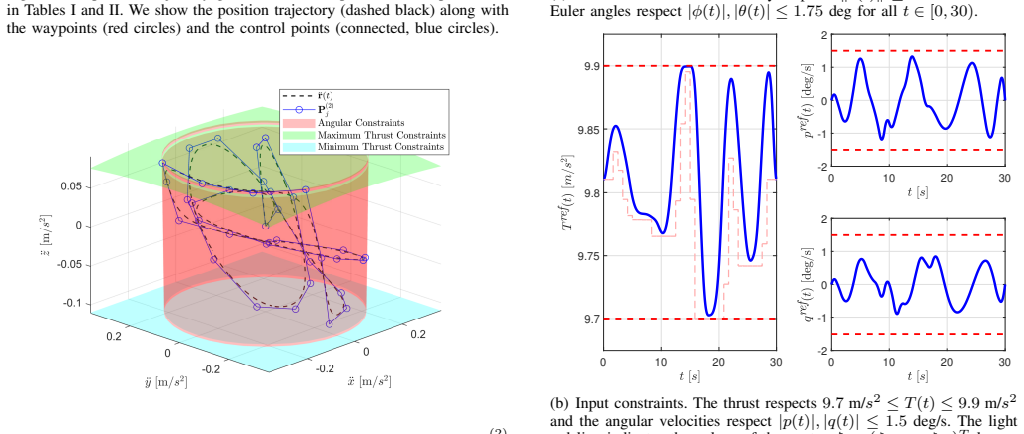
This work presents a convex optimization framework for the planning and tracking of quadcopter trajectories with continuous-time safety guarantees. Using B-spline basis functions and the differential flatness property of quadcopters, a second-order cone program is formulated to generate optimal trajectories that respect safe state and input constraints in the continuous-time sense. A quadratic program (QP) based on control barrier functions is proposed to guarantee bounded trajectory tracking in continuous time by filtering a nominal controller, where the QP is shown to be always feasible. Furthermore, conditions that ensure the safe tracking controller respects thrust, roll angle, and pitch angle constraints are also proposed. The effectiveness of the proposed framework is demonstrated by real-world experiments using a Crazyflie2.1 nano quadcopter.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a convex optimization framework for quadcopter trajectory planning and tracking that achieves continuous-time safety guarantees. Differential flatness maps states and inputs to position derivatives; B-splines with the convex-hull property are used to encode all continuous-time state/input constraints as convex (SOC) constraints inside a second-order cone program for planning. A CBF-based QP is then introduced to filter a nominal controller for bounded tracking, with a proof that this QP is always feasible; additional conditions are given to ensure the resulting controller respects thrust, roll, and pitch limits. Real-world experiments on a Crazyflie 2.1 are presented to illustrate performance.
Significance. If the feasibility result and continuous-time constraint satisfaction hold, the work supplies a practical, convex-optimization pipeline that converts differential-flatness properties into enforceable SOC constraints and supplies a provably feasible safety filter. This combination is useful for real-time quadcopter applications where both planning and tracking must respect actuator and state bounds without discretization artifacts.
major comments (2)
- [§4.2] §4.2 (QP feasibility): the claim that the CBF-QP is always feasible rests on the additional thrust/roll/pitch conditions derived in §4.3. The manuscript should explicitly state whether these conditions are checked a priori or enforced inside the QP; if they are only sufficient but not necessary, the 'always feasible' statement requires a precise qualification.
- [§3.3] §3.3 (B-spline SOC encoding): the mapping from B-spline control points to continuous-time thrust and attitude bounds via the convex-hull property is load-bearing for the continuous-time guarantee. The paper should verify that the chosen degree and knot spacing preserve the required inclusion for all admissible trajectories, not only for the optimized ones.
minor comments (2)
- [§2] Notation for the flat outputs and their derivatives is introduced inconsistently between §2 and §3; a single table of symbols would improve readability.
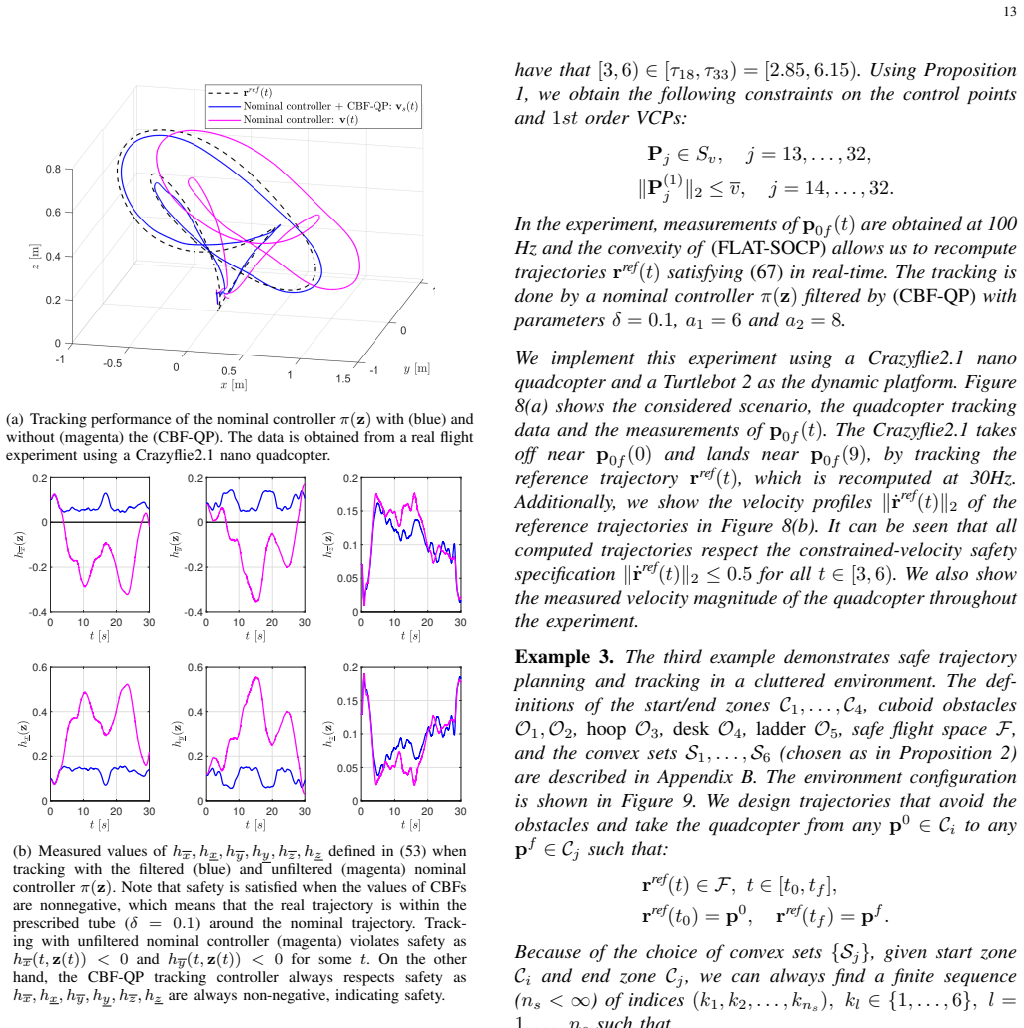
- [Figure 4] Figure 4 (tracking error plots) lacks explicit indication of the time intervals where the safety filter is active; overlaying the QP activation signal would clarify the contribution of the CBF layer.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive assessment of the manuscript. Below we respond point-by-point to the major comments.
read point-by-point responses
-
Referee: [§4.2] §4.2 (QP feasibility): the claim that the CBF-QP is always feasible rests on the additional thrust/roll/pitch conditions derived in §4.3. The manuscript should explicitly state whether these conditions are checked a priori or enforced inside the QP; if they are only sufficient but not necessary, the 'always feasible' statement requires a precise qualification.
Authors: We agree that the feasibility result in §4.2 depends on the sufficient conditions derived in §4.3. These conditions are not enforced inside the QP; they are intended to be verified a priori from the planned trajectory, system parameters, and actuator limits. The 'always feasible' claim is therefore qualified by these sufficient (but not necessary) conditions. In the revision we will add explicit qualifying language in both §4.2 and §4.3 stating that feasibility holds when the a-priori conditions are satisfied. revision: yes
-
Referee: [§3.3] §3.3 (B-spline SOC encoding): the mapping from B-spline control points to continuous-time thrust and attitude bounds via the convex-hull property is load-bearing for the continuous-time guarantee. The paper should verify that the chosen degree and knot spacing preserve the required inclusion for all admissible trajectories, not only for the optimized ones.
Authors: The convex-hull property of B-splines holds for any admissible set of control points once the degree and knot vector are fixed; it is a general property of the basis and does not depend on whether the control points result from optimization. Consequently, any trajectory whose control points satisfy the SOC constraints automatically satisfies the continuous-time bounds, regardless of how the control points were obtained. The chosen degree and knot spacing are selected to ensure the spline class can represent the required maneuvers, but the inclusion itself is independent of those choices. We will add a clarifying remark in §3.3 emphasizing this generality. revision: partial
Circularity Check
No significant circularity identified
full rationale
The paper's derivation relies on the standard differential flatness property of quadcopters (a known system property) combined with B-spline parameterization to encode continuous-time constraints as convex SOCP constraints. The CBF-QP for tracking is shown feasible under explicitly proposed additional conditions on thrust/attitude bounds; these steps are independent mathematical arguments and do not reduce by construction to fitted parameters, self-definitions, or load-bearing self-citations. No ansatz is smuggled via citation, and no renaming of known results occurs. The framework is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Quadcopters are differentially flat systems whose states and inputs can be expressed as functions of position and yaw and their derivatives.
Reference graph
Works this paper leans on
-
[1]
G. Rousseau, C. Stoica Maniu, S. Tebbani, M. Babel, and N. Martin, “Minimum-time B-spline trajectories with corridor constraints. appli- cation to cinematographic quadrotor flight plans,” Control Engineering Practice, vol. 89, pp. 190–203, 2019
work page 2019
-
[2]
Autonomous drones for assisting rescue services within the context of natural disasters,
L. Apvrille, T. Tanzi, and J.-L. Dugelay, “Autonomous drones for assisting rescue services within the context of natural disasters,” in XXXIth URSI General Assembly and Scientific Symposium (GASS), 2014, pp. 1–4
work page 2014
-
[3]
Multispectral mapping in agriculture: Terrain mosaic using an autonomous quad- copter uav,
J. Navia, I. Mondragon, D. Patino, and J. Colorado, “Multispectral mapping in agriculture: Terrain mosaic using an autonomous quad- copter uav,” in International Conference on Unmanned Aircraft Systems (ICUAS). IEEE, 2016, pp. 1351–1358
work page 2016
-
[4]
Aggressive flight with suspended payloads using vision-based control,
S. Tang, V . W ¨uest, and V . Kumar, “Aggressive flight with suspended payloads using vision-based control,” IEEE Robotics and Automation Letters, vol. 3, no. 2, pp. 1152–1159, 2018
work page 2018
-
[5]
Inexact Newton–Kantorovich methods for constrained nonlinear model predictive control,
A. L. Dontchev, M. Huang, I. V . Kolmanovsky, and M. M. Nicotra, “Inexact Newton–Kantorovich methods for constrained nonlinear model predictive control,” IEEE Transactions on Automatic Control , vol. 64, no. 9, pp. 3602–3615, 2019
work page 2019
-
[6]
Minimum snap trajectory generation and control for quadrotors,
D. Mellinger and V . Kumar, “Minimum snap trajectory generation and control for quadrotors,” in IEEE International Conference on Robotics and Automation, 2011, pp. 2520–2525
work page 2011
-
[7]
Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments,
C. Richter, A. Bry, and N. Roy, “Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments,” in Robotics research. Springer, 2016, pp. 649–666
work page 2016
-
[8]
Trajectory optimization with inter-sample obstacle avoidance via successive con- vexification,
D. Dueri, Y . Mao, Z. Mian, J. Ding, and B. Acikmese, “Trajectory optimization with inter-sample obstacle avoidance via successive con- vexification,” inIEEE Conference on Decision and Control. Melbourne, Australia: IEEE, Dec. 2017, pp. 1150–1156
work page 2017
-
[9]
J. F. Bonnans and A. Festa, “Error estimates for the Euler discretization of an optimal control problem with first-order state constraints,” SIAM Journal on Numerical Analysis , vol. 55, no. 2, pp. 445–471, 2017
work page 2017
-
[10]
Error estimates for a discrete approximation to constrained control problems,
A. L. Dontchev, “Error estimates for a discrete approximation to constrained control problems,” SIAM Journal on Numerical Analysis , vol. 18, no. 3, pp. 500–514, 1981
work page 1981
-
[11]
Constrained trajectory generation for UA V systems using a B-spline parametrization,
F. Stoican, I. Prodan, D. Popescu, and L. Ichim, “Constrained trajectory generation for UA V systems using a B-spline parametrization,” in 25th Mediterranean Conference on Control and Automation (MED) , 2017, pp. 613–618
work page 2017
-
[12]
Flat trajectory design and tracking with saturation guarantees: a nano-drone application,
N. T. Nguyen, I. Prodan, and L. Lef `evre, “Flat trajectory design and tracking with saturation guarantees: a nano-drone application,” Interna- tional Journal of Control , vol. 93, no. 6, pp. 1266–1279, 2020
work page 2020
-
[13]
Obstacle avoidance via B-spline parametrizations of flat trajectories,
F. Stoical, V .-M. Iv ˘anus ¸c˘a, I. Prodan, and D. Popescu, “Obstacle avoidance via B-spline parametrizations of flat trajectories,” in 24th Mediterranean Conference on Control and Automation (MED) . IEEE, 2016, pp. 1002–1007
work page 2016
-
[14]
L. Tang, H. Wang, Z. Liu, and Y . Wang, “A real-time quadrotor trajectory planning framework based on B-spline and nonuniform kinodynamic search,” Journal of Field Robotics , vol. 38, no. 3, pp. 452–475, 2021
work page 2021
-
[15]
Comparison of control methods for trajectory tracking in fully actuated unmanned aerial vehicles,
D. Invernizzi, M. Giurato, P. Gattazzo, and M. Lovera, “Comparison of control methods for trajectory tracking in fully actuated unmanned aerial vehicles,” IEEE Transactions on Control Systems Technology , vol. 29, no. 3, pp. 1147–1160, 2020
work page 2020
-
[16]
E. Tal and S. Karaman, “Accurate tracking of aggressive quadrotor tra- jectories using incremental nonlinear dynamic inversion and differential flatness,” IEEE Transactions on Control Systems Technology , vol. 29, no. 3, pp. 1203–1218, 2020
work page 2020
-
[17]
Onboard state dependent LQR for agile quadrotors,
P. Foehn and D. Scaramuzza, “Onboard state dependent LQR for agile quadrotors,” in IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2018, pp. 6566–6572
work page 2018
-
[18]
Flatness-based model predictive control for quadrotor trajectory tracking,
M. Greeff and A. P. Schoellig, “Flatness-based model predictive control for quadrotor trajectory tracking,” in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2018, pp. 6740–6745
work page 2018
-
[19]
A simple learning strategy for high-speed quadrocopter multi-flips,
S. Lupashin, A. Sch ¨ollig, M. Sherback, and R. D’Andrea, “A simple learning strategy for high-speed quadrocopter multi-flips,” in IEEE International Conference on Robotics and Automation (ICRA) . IEEE, 2010, pp. 1642–1648
work page 2010
-
[20]
A. Singla, S. Padakandla, and S. Bhatnagar, “Memory-based deep reinforcement learning for obstacle avoidance in UA V with limited en- vironment knowledge,” IEEE Transactions on Intelligent Transportation Systems, 2019
work page 2019
-
[21]
Safe model-based reinforcement learning with stability guarantees,
F. Berkenkamp, M. Turchetta, A. P. Schoellig, and A. Krause, “Safe model-based reinforcement learning with stability guarantees,” Advances in Neural Information Processing Systems 30, vol. 2, pp. 909–919, 2018
work page 2018
-
[22]
Control barrier function based quadratic programs for safety critical systems,
A. D. Ames, X. Xu, J. W. Grizzle, and P. Tabuada, “Control barrier function based quadratic programs for safety critical systems,” IEEE Transactions on Automatic Control, vol. 62, no. 8, pp. 3861–3876, 2017
work page 2017
-
[23]
Safe teleoperation of dynamic UA Vs through control barrier functions,
B. Xu and K. Sreenath, “Safe teleoperation of dynamic UA Vs through control barrier functions,” in IEEE International Conference on Robotics and Automation (ICRA) , 2018, pp. 7848–7855
work page 2018
-
[24]
Toward visibility guaranteed visual servoing control of quadrotor uavs,
D. Zheng, H. Wang, J. Wang, X. Zhang, and W. Chen, “Toward visibility guaranteed visual servoing control of quadrotor uavs,” IEEE/ASME Transactions on Mechatronics, vol. 24, no. 3, pp. 1087–1095, 2019
work page 2019
-
[25]
Unified multi-rate con- trol: from low level actuation to high level planning,
U. Rosolia, A. Singletary, and A. D. Ames, “Unified multi-rate con- trol: from low level actuation to high level planning,” arXiv preprint arXiv:2012.06558, 2020
-
[26]
“PX4 open source project.” [Online]. Available: https://docs.px4.io/v1. 12/en/complete\ vehicles/crazyflie21.html
-
[27]
Flatness and defect of non-linear systems: introductory theory and examples,
M. Fliess, J. L ´evine, P. Martin, and P. Rouchon, “Flatness and defect of non-linear systems: introductory theory and examples,” International journal of control , vol. 61, no. 6, pp. 1327–1361, 1995
work page 1995
-
[28]
Vector field following for quadrotors using differential flatness,
D. Zhou and M. Schwager, “Vector field following for quadrotors using differential flatness,” in IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2014, pp. 6567–6572
work page 2014
-
[29]
Real-time trajectory genera- tion for differentially flat systems,
M. J. Van Nieuwstadt and R. M. Murray, “Real-time trajectory genera- tion for differentially flat systems,” International Journal of Robust and Nonlinear Control: IFAC-Affiliated Journal, vol. 8, no. 11, pp. 995–1020, 1998
work page 1998
-
[30]
C. De Boor and C. De Boor, A practical guide to splines . springer- verlag New York, 1978, vol. 27
work page 1978
-
[31]
F. Suryawan, “Constrained trajectory generation and fault tolerant con- trol based on differential flatness and B-splines,” Ph.D. dissertation, The University of Newcastle, Australia, 2012
work page 2012
-
[32]
Robustness of control barrier functions for safety critical control,
X. Xu, P. Tabuada, A. Ames, and J. Grizzle, “Robustness of control barrier functions for safety critical control,” in IFAC Conference on Analysis and Design of Hybrid Systems, vol. 48, no. 27, 2015, pp. 54–61
work page 2015
-
[33]
Correctness guarantees for the composition of lane keeping and adaptive cruise control,
X. Xu, J. W. Grizzle, P. Tabuada, and A. D. Ames, “Correctness guarantees for the composition of lane keeping and adaptive cruise control,” IEEE Transactions on Automation Science and Engineering , vol. 15, no. 3, pp. 1216–1229, 2018
work page 2018
-
[34]
Constrained control of input–output linearizable systems using control sharing barrier functions,
X. Xu, “Constrained control of input–output linearizable systems using control sharing barrier functions,” Automatica, vol. 87, pp. 195–201, 2018
work page 2018
-
[35]
Applications of second-order cone programming,
M. S. Lobo, L. Vandenberghe, S. Boyd, and H. Lebret, “Applications of second-order cone programming,” Linear algebra and its applications , vol. 284, no. 1-3, pp. 193–228, 1998
work page 1998
-
[36]
Second-order cone programming,
F. Alizadeh and D. Goldfarb, “Second-order cone programming,” Math- ematical programming, vol. 95, no. 1, pp. 3–51, 2003
work page 2003
-
[37]
S. Boyd, S. P. Boyd, and L. Vandenberghe, Convex optimization . Cambridge university press, 2004
work page 2004
-
[38]
F. A. Potra and S. J. Wright, “Interior-point methods,” Journal of computational and applied mathematics, vol. 124, no. 1-2, pp. 281–302, 2000
work page 2000
-
[39]
MOSEK, The MOSEK optimization toolbox for MATLAB manual. Version 9.3, 2021
work page 2021
-
[40]
Effective angular constrained trajectory generation for thrust-propelled vehicles,
N. T. Nguyen, I. Prodan, and L. Lef `evre, “Effective angular constrained trajectory generation for thrust-propelled vehicles,” European Control Conference (ECC), pp. 1833–1838, 2018
work page 2018
-
[41]
Lossless convexification of a class of optimal control problems with non-convex control constraints,
B. Ac ¸ıkmes ¸e and L. Blackmore, “Lossless convexification of a class of optimal control problems with non-convex control constraints,” Auto- matica, vol. 47, no. 2, pp. 341–347, 2011
work page 2011
-
[42]
A model predictive controller for quadrocopter state interception,
M. W. Mueller and R. D’Andrea, “A model predictive controller for quadrocopter state interception,” in European Control Conference (ECC). IEEE, 2013, pp. 1383–1389
work page 2013
-
[43]
F. Gao, W. Wu, Y . Lin, and S. Shen, “Online safe trajectory generation for quadrotors using fast marching method and Bernstein basis polyno- mial,” in IEEE International Conference on Robotics and Automation (ICRA), 2018, pp. 344–351
work page 2018
-
[44]
OctoMap: An efficient probabilistic 3D mapping framework based on octrees,
A. Hornung, K. M. Wurm, M. Bennewitz, C. Stachniss, and W. Burgard, “OctoMap: An efficient probabilistic 3D mapping framework based on octrees,” Autonomous Robots, 2013
work page 2013
-
[45]
Time-optimal trajectory generation for dynamic vehicles: A bilevel optimization approach,
G. Tang, W. Sun, and K. Hauser, “Time-optimal trajectory generation for dynamic vehicles: A bilevel optimization approach,” in IEEE/RSJ 16 International Conference on Intelligent Robots and Systems (IROS) . IEEE, 2019, pp. 7644–7650
work page 2019
-
[46]
Fast UA V trajectory optimization using bilevel optimization with analytical gradients,
W. Sun, G. Tang, and K. Hauser, “Fast UA V trajectory optimization using bilevel optimization with analytical gradients,” in 2020 American Control Conference (ACC). IEEE, 2020, pp. 82–87
work page 2020
-
[47]
OSQP: an operator splitting solver for quadratic programs,
B. Stellato, G. Banjac, P. Goulart, A. Bemporad, and S. Boyd, “OSQP: an operator splitting solver for quadratic programs,” Mathematical Programming Computation, vol. 12, no. 4, pp. 637–672, 2020
work page 2020
-
[48]
Y . Zhang, S. Walters, and X. Xu, “Control barrier function meets interval analysis: Safety-critical control with measurement and actuation uncertainties,” arXiv preprint arXiv:2110.00915 , 2021
-
[49]
Yalmip : A toolbox for modeling and optimization in matlab,
J. L ¨ofberg, “Yalmip : A toolbox for modeling and optimization in matlab,” in In Proceedings of the CACSD Conference , Taipei, Taiwan, 2004
work page 2004
-
[50]
“Supplementary video,” https://xu.me.wisc.edu/wp-content/uploads/ sites/1196/2021/10/continuous-safety.mp4. APPENDIX A. Construction of Matrix Br The matrix Br∈ R(N +1)×(N +r+1) is only defined when 0≤ r≤ d, and can be computed from two matrices Md,d−r and Cr such that Br = Md,d−rCr; see [31] for more details. The matrix Md,d−r ∈ R(N +1)×(N−r+1) can be con...
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.