Cyclic Nullspace Coordination: Perpetual Flight of Aerial Carriers for Static Suspension
Pith reviewed 2026-05-23 01:20 UTC · model grok-4.3
The pith
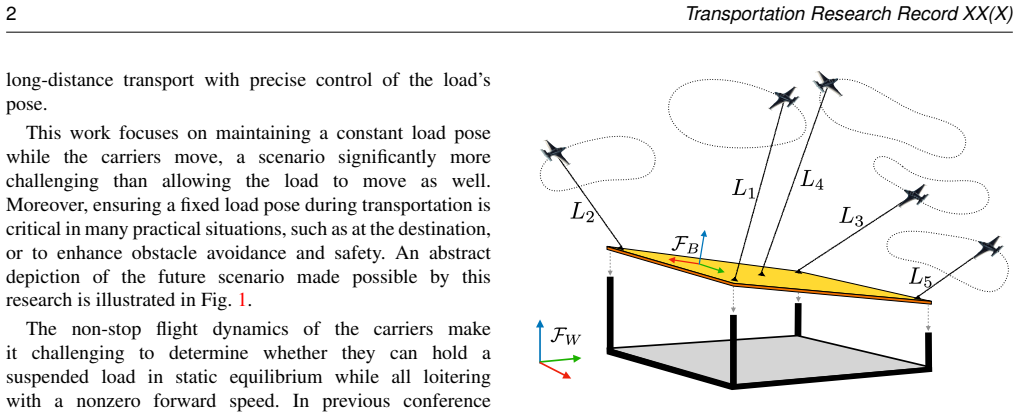
Three or more aerial carriers can fly continuously while keeping a cable-suspended load in a fixed pose.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
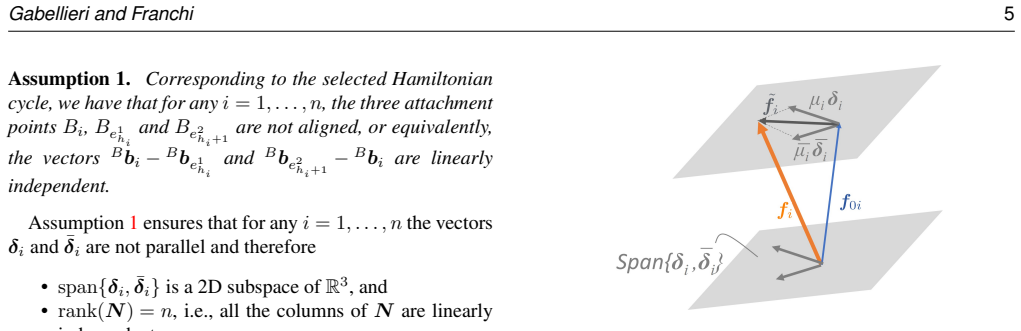
Non-stop flights of three or more carriers are compatible with holding a constant pose of a cable-suspended load. This is realized by choosing n linearly independent internal-force directions as the edges of a Hamiltonian cycle on the graph of cable attachment points, then mapping those edges to periodic coordinates via graph coloring so that no adjacent coordinates have simultaneous zero derivatives; the resulting elliptical force trajectories in distinct 2-D affine subspaces project onto the cable spheres with nonzero tangential velocity, satisfying load statics for any n greater than or equal to 3.
What carries the argument
Mapping each edge of the Hamiltonian cycle to a periodic coordinate through graph coloring, which guarantees that no adjacent coordinates have simultaneous zero derivatives and thereby produces force trajectories with nonzero tangential velocity on each cable constraint sphere.
If this is right
- The construction supplies explicit tuning guidelines that scale to any number of carriers n greater than or equal to 3.
- A fixed-wing-compatible planner is obtained that preserves load statics under speed, bank-angle, and flight-path constraints.
- Quantitative bounds are given on sensitivity to parameter variation and on the effect of single-carrier failure.
- The theoretical trajectories are confirmed by both numerical simulation and hardware experiments with quadrotor UAVs.
Where Pith is reading between the lines
- The same cycle-based nullspace selection could be tested on systems with more than one suspended object or with non-rigid cables.
- Extending the planner to include wind disturbances would reveal whether the perpetual-motion property survives realistic outdoor conditions.
- The method suggests a general template for other multi-agent problems in which continuous motion must coexist with an equilibrium constraint at a central object.
Load-bearing premise
The graph-coloring assignment of periodic coordinates to Hamiltonian-cycle edges ensures that no two adjacent coordinates reach zero derivative at the same instant.
What would settle it
An experiment in which the carriers follow the generated trajectories yet the measured pose of the load begins to drift after a finite number of cycles.
Figures
read the original abstract
This work demonstrates that the non-stop flights of three or more carriers are compatible with holding a constant pose of a cable-suspended load. It also presents an algorithm for generating the carriers' coordinated non-stop trajectories. The proposed method builds upon two pillars: (1) the choice of n special linearly independent directions of internal forces within the 3n-6-dimensional nullspace of the grasp matrix of the load, chosen as the edges of a Hamiltonian cycle on the graph that connects the cable attachment points on the load. Adjacent pairs of directions are used to generate n forces evolving on distinct 2D affine subspaces, despite the attachment points being generically in 3D; (2) the construction of elliptical trajectories within these subspaces by mapping, through appropriate graph coloring, each edge of the Hamiltonian cycle to a periodic coordinate while ensuring that no adjacent coordinates exhibit simultaneous zero derivatives. Combined with conditions for load statics and attachment point positions, these choices ensure that each of the n force trajectories projects onto the corresponding cable constraint sphere with non-zero tangential velocity, enabling perpetual motion of the carriers while the load is still. The work provides a scalable constructive design for any n greater than or equal to 3 with tuning guidelines, quantifies sensitivity and single-carrier failures, and provides a fixed-wing-compatible planner that preserves load statics under speed/bank/flight-path constraints. The theoretical findings are validated through simulations and laboratory experiments with quadrotor UAVs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that non-stop flights of three or more aerial carriers are compatible with holding a constant pose of a cable-suspended load. It presents a scalable constructive algorithm based on two pillars: (1) selecting n linearly independent internal-force directions in the 3n-6-dimensional nullspace of the grasp matrix, taken as the edges of a Hamiltonian cycle on the attachment-point graph; (2) generating elliptical trajectories in the resulting 2D affine subspaces by mapping cycle edges to periodic coordinates via graph coloring such that no adjacent coordinates have simultaneous zero derivatives. Combined with load-statics and attachment conditions, this ensures each force trajectory projects onto its cable sphere with non-zero tangential velocity at all times. The work includes tuning guidelines, sensitivity analysis, a fixed-wing-compatible planner, and validation via simulations and quadrotor experiments.
Significance. If the construction is verified, the result supplies a parameter-light, graph-theoretic method for perpetual multi-carrier suspension that scales with n and extends to fixed-wing platforms. The explicit use of the grasp-matrix nullspace and Hamiltonian-cycle structure, together with hardware validation, constitutes a concrete contribution to aerial manipulation.
major comments (2)
- [Pillar (2) construction] Pillar (2) construction (as described in the abstract and the section outlining the second pillar): the claim that the graph-coloring mapping of Hamiltonian-cycle edges to periodic coordinates guarantees that no adjacent coordinates exhibit simultaneous zero derivatives is load-bearing for the non-zero tangential-velocity condition. The manuscript asserts this property but supplies neither a general proof for arbitrary n nor an exhaustive check for small n and generic attachment geometries; without this, the perpetual-motion guarantee remains unsecured.
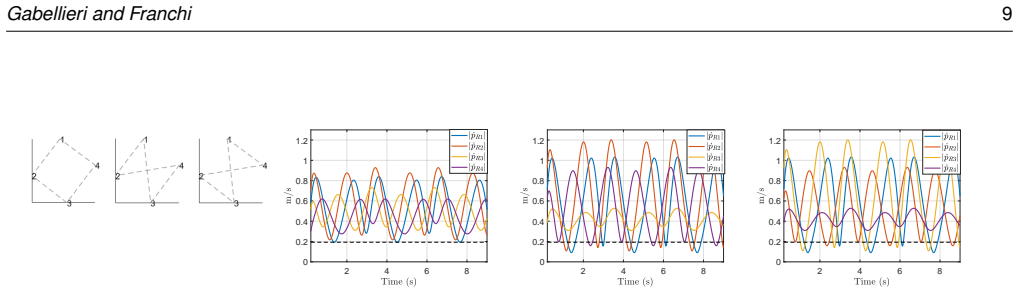
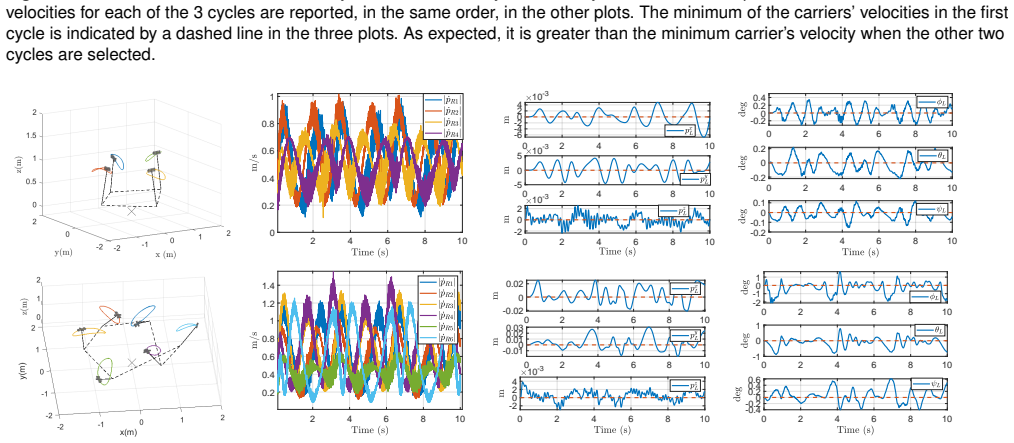
- [Validation section] Validation section: the abstract states that simulations and laboratory experiments with quadrotors confirm the findings, yet no quantitative metrics (e.g., maximum load-pose deviation, minimum carrier speed over multi-period runs, or force-projection error) are referenced. This weakens assessment of how closely the statics and non-stop conditions are realized in practice.
minor comments (2)
- [Introduction / Preliminaries] Early in the manuscript, restate the precise dimension of the grasp-matrix nullspace (3n-6) and the definition of the grasp matrix itself to aid readers outside the cable-suspension literature.
- [Figures] In trajectory figures, explicitly annotate the periodic coordinates and overlay the tangential-velocity magnitude to make the non-zero condition visually verifiable.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and will revise the manuscript accordingly to strengthen the presentation.
read point-by-point responses
-
Referee: [Pillar (2) construction] Pillar (2) construction (as described in the abstract and the section outlining the second pillar): the claim that the graph-coloring mapping of Hamiltonian-cycle edges to periodic coordinates guarantees that no adjacent coordinates exhibit simultaneous zero derivatives is load-bearing for the non-zero tangential-velocity condition. The manuscript asserts this property but supplies neither a general proof for arbitrary n nor an exhaustive check for small n and generic attachment geometries; without this, the perpetual-motion guarantee remains unsecured.
Authors: We agree that explicitly establishing the property strengthens the perpetual-motion guarantee. In the revised manuscript we will add a general proof for arbitrary n that relies on the cycle structure and the proper 2-coloring of the cycle edges (ensuring that at most one coordinate per adjacent pair can have zero derivative at any instant). We will also include an exhaustive numerical verification for n = 3 to 6 over generic attachment geometries. revision: yes
-
Referee: [Validation section] Validation section: the abstract states that simulations and laboratory experiments with quadrotors confirm the findings, yet no quantitative metrics (e.g., maximum load-pose deviation, minimum carrier speed over multi-period runs, or force-projection error) are referenced. This weakens assessment of how closely the statics and non-stop conditions are realized in practice.
Authors: We concur that quantitative metrics improve the assessment of practical performance. The revised validation section will report explicit values for maximum load-pose deviation, minimum carrier speed over multi-period runs, and force-projection error, drawn from both the simulation suite and the quadrotor experiments. revision: yes
Circularity Check
No significant circularity; constructive nullspace and graph-coloring design is self-contained
full rationale
The paper's core contribution is an explicit constructive algorithm: select n independent nullspace directions as Hamiltonian-cycle edges on the attachment graph, then map those edges to periodic coordinates via graph coloring so that adjacent coordinates avoid simultaneous zero derivatives. These choices are shown to ensure each force trajectory lies on its cable sphere with non-zero tangential velocity while preserving load statics. No parameter is fitted to data and then relabeled a prediction; no result is justified solely by prior self-citation; the conditions are enforced directly by the algebraic and combinatorial construction rather than by definition or renaming. The derivation therefore stands on independent linear-algebra and graph-theoretic steps.
Axiom & Free-Parameter Ledger
free parameters (1)
- trajectory tuning parameters
axioms (3)
- domain assumption Existence of a Hamiltonian cycle on the graph whose vertices are the cable attachment points on the load
- standard math The chosen directions remain linearly independent in the nullspace of the grasp matrix
- standard math A proper graph coloring of the cycle edges exists such that no adjacent edges share the same periodic coordinate
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
mapping, through appropriate graph coloring, each edge of the Hamiltonian cycle to a periodic coordinate while ensuring that no adjacent coordinates exhibit simultaneous zero derivatives
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
libraries c1(t)=A cos(ξt), c2(t)=A cos(ξt+π/3), c3(t)=A cos(ξt+2π/3) via edge coloring
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 2 Pith papers
-
Geometric Inverse Flight Dynamics on SO(3) and Application to Tethered Fixed-Wing Aircraft
A coordinate-free formulation on SO(3) yields closed-form trajectory-to-input maps for fixed-wing inverse flight dynamics, with analytic bank-angle expressions for tethered flight on spherical paths.
-
Trajectory control of a suspended load with non-stopping flying carriers
A wrench-based feedback controller with dynamic internal-force optimization enables non-stopping carrier trajectories during cooperative suspended-load transport.
Reference graph
Works this paper leans on
-
[1]
Ruggiero, F., V . Lippiello, and A. Ollero. Aerial manipulation: A literature review. V ol. 3, No. 3, 2018, pp. 1957–1964
work page 2018
- [2]
- [3]
-
[4]
Sreenath, K., N. Michael, and V . Kumar. Trajectory generation and control of a quadrotor with a cable-suspended load-a differentially-flat hybrid system. In2013. 2013, pp. 4888–4895
work page 2013
-
[5]
Pereira, P. O., M. Herzog, and D. V . Dimarogonas. Slung load transportation with a single aerial vehicle and disturbance removal. In 2016 24th. 2016, pp. 671–676
work page 2016
-
[6]
Bernard, M. and K. Kondak. Generic slung load transportation system using small size helicopters. In 2009. 2009, pp. 3258– 3264
work page 2009
- [7]
-
[8]
Michael, N., J. Fink, and V . Kumar. Cooperative manipulation and transportation with aerial robots. V ol. 30, 2011, pp. 73–86
work page 2011
-
[9]
Fink, J., N. Michael, S. Kim, and V . Kumar. Planning and control for cooperative manipulation and transportation with aerial robots. In 14th. Springer, 2011, pp. 643–659
work page 2011
- [10]
-
[11]
Gassner, M., T. Cieslewski, and D. Scaramuzza. Dynamic collaboration without communication: Vision-based cable- suspended load transport with two quadrotors. In 2017. 2017, pp. 5196–5202
work page 2017
-
[12]
Wahba, K. and W. H ¨onig. Efficient Optimization-based Cable Force Allocation for Geometric Control of a Multirotor Team Transporting a Payload
-
[13]
Goodman, J. and L. Colombo. Geometric control of two quadrotors carrying a rigid rod with elastic cables. V ol. 32, No. 5, 2022, p. 65
work page 2022
- [14]
-
[15]
Pereira, P. O., P. Roque, and D. V . Dimarogonas. Asymmetric collaborative bar stabilization tethered to two heterogeneous aerial vehicles. In 2018. 2018, pp. 5247–5253
work page 2018
-
[16]
Chen, T. and J. Shan. Cooperative Transportation of Cable- suspended Slender Payload Using Two Quadrotors. In 2019 IEEE Int. Conf. on Unmanned Systems. 2019, pp. 432–437. doi: 10.1109/ICUS48101.2019.8995928
-
[17]
Jiang, Q. and V . Kumar. The inverse kinematics of cooperative transport with multiple aerial robots. V ol. 29, No. 1, 2012, pp. 136–145
work page 2012
-
[18]
Mohammadi, K., S. Sirouspour, and A. Grivani. Passivity- Based Control of Multiple Quadrotors Carrying a Cable- Suspended Payload. V ol. 27, No. 4, 2022, pp. 2390–2400. doi: 10.1109/TMECH.2021.3102522
-
[19]
Masone, C., H. H. B ¨ulthoff, and P. Stegagno. Cooperative transportation of a payload using quadrotors: A reconfigurable cable-driven parallel robot. In 2016. 2016, pp. 1623–1630. doi: 10.1109/IROS.2016.7759262
-
[20]
Leutenegger, S., C. H ¨urzeler, A. K. Stowers, K. Alexis, M. W. Achtelik, D. Lentink, P. Y . Oh, and R. Siegwart. Flying robots. Springer Handbook of Robotics, 2016, pp. 623–670
work page 2016
-
[21]
Gabellieri, C. and A. Franchi. On the Existence of Static Equilibria of a Cable-Suspended Load with Non-stopping Flying Carriers. In 2024. Chania, Greece, 2024, pp. 638–644. doi:10.1109/ICUAS60882.2024.10556930
-
[22]
Sanalitro, D., H. J. Savino, M. Tognon, J. Cort ´es, and A. Franchi. Full-pose manipulation control of a cable- suspended load with multiple UA Vs under uncertainties. V ol. 5, No. 2, 2020, pp. 2185–2191
work page 2020
-
[23]
Virtual truss model for characterization of internal forces for multiple finger grasps
Yoshikawa, T. Virtual truss model for characterization of internal forces for multiple finger grasps. V ol. 15, No. 5, 1999, pp. 941–947
work page 1999
-
[24]
Tognon, M., C. Gabellieri, L. Pallottino, and A. Franchi. Aerial co-manipulation with cables: The role of internal force for equilibria, stability, and passivity. V ol. 3, No. 3, 2018, pp. 2577– 2583
work page 2018
-
[25]
Zelazo, D., A. Franchi, H. H. B ¨ulthoff, and P. R. Giordano. Decentralized Rigidity Maintenance Control with Range Measurements for Multi-Robot Systems. The International Journal of Robotics Research , V ol. 34, No. 1, 2015, pp. 105–
work page 2015
-
[26]
doi:10.1177/0278364914546173
-
[27]
The Mathematical Coloring Book
Soifer, A. The Mathematical Coloring Book. Springer-Verlag, 2008. Acknowledgements This work was partially funded by the Horizon Europe research and innovation programs under agreement no. 101059875 (Flyflic) and agreement no. 101120732 (Autoassess). Prepared using TRR.cls
work page 2008
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.