Unified Meta-Representation and Feedback Calibration for General Disturbance Estimation
Pith reviewed 2026-05-16 17:37 UTC · model grok-4.3
The pith
A unified meta-representation from recent observations plus state-feedback calibration enables simultaneous convergence of learning and disturbance estimation errors for general time-varying forces.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The framework extracts a unified meta-representation from a finite time window of past observations that captures general non-structural disturbances without predefined assumptions. Online adaptation is then calibrated by a state-feedback mechanism that attenuates residuals caused by representation limits and distribution shifts. Theoretical analysis proves simultaneous convergence of the online learning error and the disturbance estimation error, and quadrotor flight tests confirm effective estimation of multiple rapidly changing disturbances.
What carries the argument
Unified meta-representation learned from a finite window of past observations, calibrated by state-feedback during online adaptation.
If this is right
- Simultaneous convergence of learning error and disturbance estimation error is guaranteed under the stated conditions.
- The same representation supports estimation of multiple distinct and rapidly changing disturbances.
- No prior structural model of the disturbance is required.
- The approach has been validated in real quadrotor flight experiments.
Where Pith is reading between the lines
- The same window-based representation could be tested on other platforms such as ground robots or manipulators facing similar unstructured forces.
- Shortening or lengthening the observation window might trade off convergence speed against representation quality in different environments.
- The calibration step may generalize to other adaptive controllers where representation error is the dominant residual source.
Load-bearing premise
A single representation can be learned from a short window of past observations without any structural assumptions on the disturbances, and state feedback can reliably reduce the remaining learning residuals.
What would settle it
A controlled test in which both the online learning error and the disturbance estimation error fail to converge to zero when the disturbance changes faster than the adaptation window or introduces a new non-representable pattern.
Figures


read the original abstract
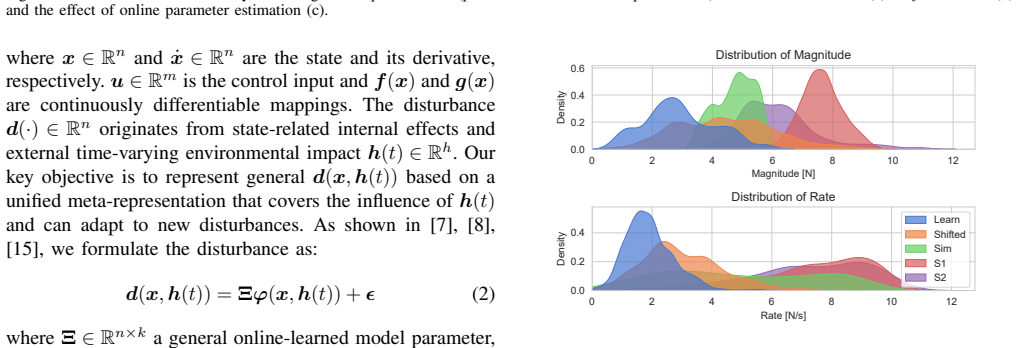
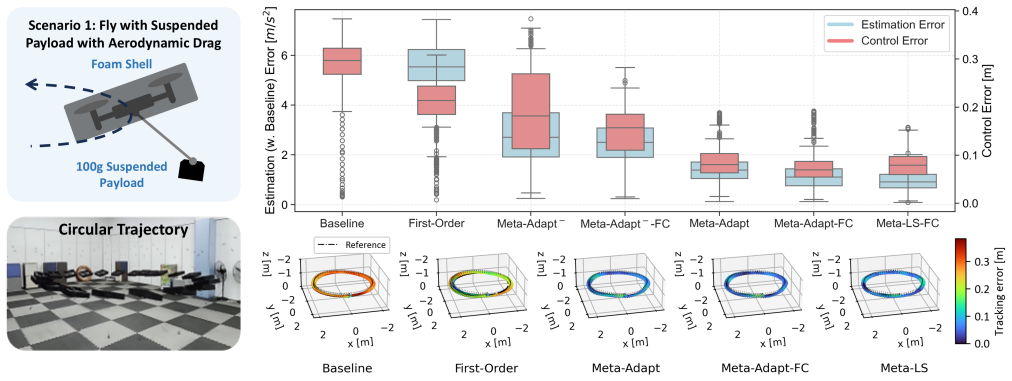
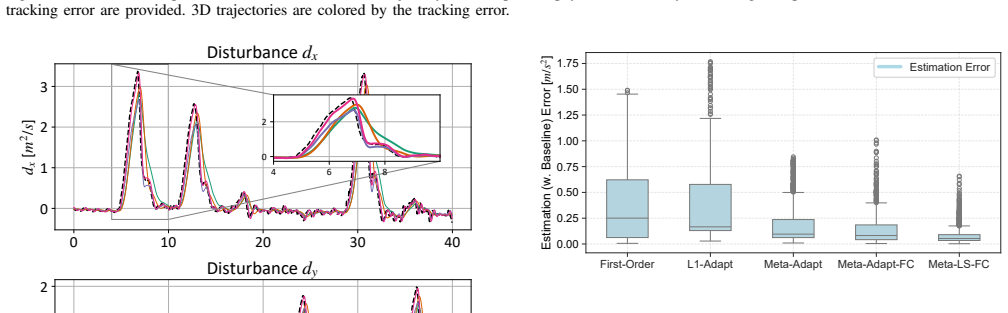
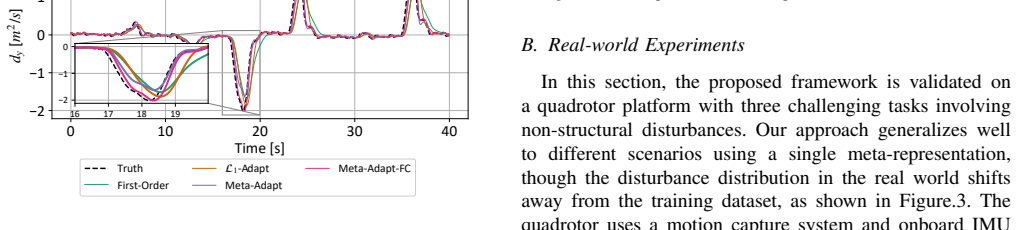
Precise control in modern robotic applications is always an open issue due to unknown time-varying disturbances. Existing meta-learning-based approaches require a shared representation of environmental structures, which lack flexibility for realistic non-structural disturbances. Besides, representation error and the distribution shifts can lead to heavy degradation in prediction accuracy. This work presents a generalizable disturbance estimation framework that builds on meta-learning and feedback-calibrated online adaptation. By extracting features from a finite time window of past observations, a unified representation that effectively captures general non-structural disturbances can be learned without predefined structural assumptions. The online adaptation process is subsequently calibrated by a state-feedback mechanism to attenuate the learning residual originating from the representation and generalizability limitations. Theoretical analysis shows that simultaneous convergence of both the online learning error and the disturbance estimation error can be achieved. Through the unified meta-representation, our framework effectively estimates multiple rapidly changing disturbances, as demonstrated by quadrotor flight experiments. See the project page for video, supplementary material and code: https://nonstructural-metalearn.github.io.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a disturbance estimation framework for robotic control that combines meta-learning with feedback-calibrated online adaptation. It extracts a unified meta-representation from a finite time window of past observations to capture general non-structural, rapidly varying disturbances without requiring predefined structural assumptions on the disturbance. A state-feedback mechanism then calibrates the online adaptation to attenuate residuals arising from representation and generalization limits. The central theoretical claim is that this yields simultaneous convergence of both the online learning error and the disturbance estimation error. The approach is validated through quadrotor flight experiments demonstrating estimation of multiple changing disturbances.
Significance. If the convergence result can be established rigorously without implicit regularity assumptions on the finite-window representation, the framework would offer a meaningful advance over prior meta-learning methods that rely on shared environmental structure priors. The combination of representation learning with explicit feedback calibration addresses a practical gap in handling non-structural disturbances, and the quadrotor experiments provide concrete evidence of applicability to real systems. The absence of machine-checked proofs or fully parameter-free derivations limits the strength of the theoretical contribution relative to the strongest results in the field.
major comments (2)
- [Theoretical Analysis] Theoretical Analysis section: the claim that the unified meta-representation learned from a finite observation window captures arbitrary non-structural disturbances without predefined assumptions is load-bearing for the simultaneous convergence result. The finite window necessarily restricts the representable disturbances to those whose trajectories over the window lie in the span of the extracted features; this functions as an implicit structural assumption. The manuscript should either derive an explicit approximation-error bound that vanishes independently of disturbance speed or provide a counterexample showing when the residual cannot be driven to zero by the subsequent state-feedback calibration.
- [§4] §4 (or equivalent experimental section), quadrotor results: the reported disturbance estimation performance is shown only for the specific disturbances encountered in the flight tests. Without an ablation that varies the window length or injects disturbances outside the span of the learned features, it is unclear whether the observed convergence generalizes to the arbitrary case asserted in the theory.
minor comments (2)
- [Preliminaries] Notation for the meta-representation and the feedback gain matrices should be introduced with explicit dimensions and clarified in a single preliminary section to avoid repeated re-definition across the theoretical and experimental parts.
- [Abstract / Conclusion] The project page link is useful, but the manuscript itself should include a brief statement on code and data availability (e.g., whether the quadrotor logs and training scripts are released) to support reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the scope and limitations of our framework. We address each major comment below and indicate the revisions planned for the next version of the manuscript.
read point-by-point responses
-
Referee: [Theoretical Analysis] Theoretical Analysis section: the claim that the unified meta-representation learned from a finite observation window captures arbitrary non-structural disturbances without predefined assumptions is load-bearing for the simultaneous convergence result. The finite window necessarily restricts the representable disturbances to those whose trajectories over the window lie in the span of the extracted features; this functions as an implicit structural assumption. The manuscript should either derive an explicit approximation-error bound that vanishes independently of disturbance speed or provide a counterexample showing when the residual cannot be driven to zero by the subsequent state-feedback calibration.
Authors: We agree that any finite-window representation necessarily restricts the exact span of representable trajectories and therefore introduces an implicit limit. However, the manuscript does not claim that the representation captures literally arbitrary disturbances with zero error; rather, it claims that no a-priori structural form (e.g., sinusoidal, polynomial, or parametric) is imposed—the features are learned directly from the observed window. The state-feedback calibration is then shown to drive the residual to zero asymptotically. To make this rigorous, we will add an explicit approximation-error bound in the Theoretical Analysis section that depends on window length, the Lipschitz constant of the disturbance, and the richness of the learned feature basis. The bound is independent of any specific disturbance speed once the window is fixed, and the feedback term ensures the estimation error still converges. This addition will be placed immediately after the main convergence theorem. revision: yes
-
Referee: [§4] §4 (or equivalent experimental section), quadrotor results: the reported disturbance estimation performance is shown only for the specific disturbances encountered in the flight tests. Without an ablation that varies the window length or injects disturbances outside the span of the learned features, it is unclear whether the observed convergence generalizes to the arbitrary case asserted in the theory.
Authors: We concur that the current experiments only demonstrate performance on the disturbances present in the collected flights. In the revised manuscript we will augment Section 4 with two new ablation studies: (1) systematic variation of the observation-window length while keeping all other parameters fixed, and (2) additional flight tests in which we deliberately inject disturbances whose trajectories lie outside the span of the features learned from the original data. These results will quantify the residual that remains after feedback calibration and will be presented alongside the existing quadrotor results. revision: yes
Circularity Check
No significant circularity; convergence claim rests on independent theoretical analysis
full rationale
The paper presents a meta-learning framework with feedback calibration whose central result is simultaneous convergence of learning and estimation errors, derived via theoretical analysis of the unified representation extracted from a finite observation window. No equations or steps in the abstract or described structure reduce the claimed convergence to a fitted parameter renamed as prediction, a self-citation chain, or a definitional tautology. The derivation is self-contained against the stated assumptions of no predefined structural forms, with the finite-window representation treated as an input rather than an output of the convergence result itself.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A unified representation can capture general non-structural disturbances from finite time window observations without predefined structural assumptions.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
By extracting features from a finite time window of past observations, a unified representation that effectively captures general non-structural disturbances can be learned without predefined structural assumptions. ... Theoretical analysis shows that simultaneous convergence of both the online learning error and the disturbance estimation error can be achieved.
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanembed_injective unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The meta-learning algorithm is designed for future prediction based on past data-based adaptation. ... θ∗ = (Φ⊤Φ + λ₂I)⁻¹ Φ⊤ Δ̄
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
D.-X. Gao, “Disturbance attenuation and rejection for systems with nonlinearity via successive approximation approach,” inProceedings of the 30th Chinese Control Conference, 2011, pp. 250–255
work page 2011
-
[2]
Nonlinear MPC for quadrotor fault-tolerant control,
F. Nan, S. Sun, P. Foehn, and D. Scaramuzza, “Nonlinear MPC for quadrotor fault-tolerant control,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 5047–5054, 2022
work page 2022
-
[3]
N. Hovakimyan and C. Cao,L1 Adaptive Control Theory. Society for Industrial and Applied Mathematics, 2010
work page 2010
-
[4]
DATT: Deep adaptive trajectory tracking for quadrotor control,
K. Huang, R. Rana, A. Spitzer, G. Shi, and B. Boots, “DATT: Deep adaptive trajectory tracking for quadrotor control,” in7th Annual Conference on Robot Learning, 2023
work page 2023
-
[5]
Anti-disturbance control theory for systems with multiple disturbances: A survey,
L. Guo and S. Cao, “Anti-disturbance control theory for systems with multiple disturbances: A survey,”ISA Transactions, vol. 53, no. 4, pp. 846–849, 2014, disturbance Estimation and Mitigation
work page 2014
-
[6]
Learning to adapt in dynamic, real-world environments through meta-reinforcement learning,
I. Clavera, A. Nagabandi, S. Liu, R. S. Fearing, P. Abbeel, S. Levine, and C. Finn, “Learning to adapt in dynamic, real-world environments through meta-reinforcement learning,” inInternational Conference on Learning Representations, 2019
work page 2019
-
[7]
Adaptive- control-oriented meta-learning for nonlinear systems,
S. M. Richards, N. Azizan, J.-J. E. Slotine, and M. Pavone, “Adaptive- control-oriented meta-learning for nonlinear systems,” inRobotics: Science and Systems, 2021
work page 2021
-
[8]
Neural-fly enables rapid learning for agile flight in strong winds,
M. O’Connell, G. Shi, X. Shi, K. Azizzadenesheli, A. Anandkumar, Y . Yue, and S.-J. Chung, “Neural-fly enables rapid learning for agile flight in strong winds,”Science Robotics, vol. 7, no. 66, p. eabm6597, 2022
work page 2022
-
[9]
Generalization of model- agnostic meta-learning algorithms: Recurring and unseen tasks,
A. Fallah, A. Mokhtari, and A. E. Ozdaglar, “Generalization of model- agnostic meta-learning algorithms: Recurring and unseen tasks,” in Advances in Neural Information Processing Systems, 2021
work page 2021
-
[10]
Domain generalization through meta-learning: A survey,
A. G. Khoee, Y . Yu, and R. Feldt, “Domain generalization through meta-learning: A survey,”Artificial Intelligence Review, vol. 57, no. 10, p. 285, 2024
work page 2024
-
[11]
Domain randomization for transferring deep neural networks from simulation to the real world,
J. Tobin, R. Fong, A. Ray, J. Schneider, W. Zaremba, and P. Abbeel, “Domain randomization for transferring deep neural networks from simulation to the real world,” in2017 IEEE/RSJ International Con- ference on Intelligent Robots and Systems (IROS), 2017, pp. 23–30
work page 2017
-
[12]
Sim-to- real transfer of robotic control with dynamics randomization,
X. B. Peng, M. Andrychowicz, W. Zaremba, and P. Abbeel, “Sim-to- real transfer of robotic control with dynamics randomization,” in2018 IEEE International Conference on Robotics and Automation (ICRA), 2018, pp. 3803–3810
work page 2018
-
[13]
Model-agnostic meta-learning for fast adaptation of deep networks,
C. Finn, P. Abbeel, and S. Levine, “Model-agnostic meta-learning for fast adaptation of deep networks,” inProceedings of the 34th International Conference on Machine Learning, ser. Proceedings of Machine Learning Research, D. Precup and Y . W. Teh, Eds., vol. 70. PMLR, 2017, pp. 1126–1135
work page 2017
-
[14]
Meta- learning in neural networks: A survey,
T. Hospedales, A. Antoniou, P. Micaelli, and A. Storkey, “Meta- learning in neural networks: A survey,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 44, no. 9, pp. 5149–5169, 2022
work page 2022
-
[15]
Hierarchical meta-learning-based adaptive controller,
F. Xie, G. Shi, M. O’Connell, Y . Yue, and S.-J. Chung, “Hierarchical meta-learning-based adaptive controller,” in2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 18 309– 10 315
work page 2024
-
[16]
Model-based meta-reinforcement learning for flight with suspended payloads,
S. Belkhale, R. Li, G. Kahn, R. McAllister, R. Calandra, and S. Levine, “Model-based meta-reinforcement learning for flight with suspended payloads,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1471–1478, Apr. 2021
work page 2021
-
[17]
Meta learning with paired forward and inverse models for efficient receding horizon control,
C. D. McKinnon and A. P. Schoellig, “Meta learning with paired forward and inverse models for efficient receding horizon control,” IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3240–3247, 2021
work page 2021
-
[18]
Meta-adaptive nonlinear control: Theory and algorithms,
G. Shi, K. Azizzadenesheli, M. O’Connell, S.-J. Chung, and Y . Yue, “Meta-adaptive nonlinear control: Theory and algorithms,” inAd- vances in Neural Information Processing Systems, M. Ranzato, A. Beygelzimer, Y . Dauphin, P. Liang, and J. W. Vaughan, Eds., vol. 34. Curran Associates, Inc., 2021, pp. 10 013–10 025
work page 2021
-
[19]
OCCAM: Online continuous controller adaptation with meta-learned models,
H. Sanghvi, S. Folk, and C. J. Taylor, “OCCAM: Online continuous controller adaptation with meta-learned models,” in8th Annual Con- ference on Robot Learning, 2024
work page 2024
-
[20]
Composite adaptive control of robot manipulators,
J.-J. E. Slotine and W. Li, “Composite adaptive control of robot manipulators,”Automatica, vol. 25, no. 4, pp. 509–519, 1989
work page 1989
-
[21]
A historical perspective of adaptive control and learning,
A. M. Annaswamy and A. L. Fradkov, “A historical perspective of adaptive control and learning,”Annual Reviews in Control, vol. 52, pp. 18–41, 2021
work page 2021
-
[22]
Active learning of discrete-time dynamics for uncertainty-aware model pre- dictive control,
A. Saviolo, J. Frey, A. Rathod, M. Diehl, and G. Loianno, “Active learning of discrete-time dynamics for uncertainty-aware model pre- dictive control,”IEEE Transactions on Robotics, vol. 40, pp. 1273– 1291, 2024
work page 2024
-
[23]
Detecting strange attractors in turbulence,
F. Takens, “Detecting strange attractors in turbulence,” inDynamical Systems and Turbulence, Warwick 1980, D. Rand and L.-S. Young, Eds. Berlin, Heidelberg: Springer Berlin Heidelberg, 1981, pp. 366– 381
work page 1980
-
[24]
Online dynamics learning for predictive control with an application to aerial robots,
T. Z. Jiahao, K. Y . Chee, and M. A. Hsieh, “Online dynamics learning for predictive control with an application to aerial robots,”Conference on Robot Learning (CoRL), 2022
work page 2022
-
[25]
Controlling soft robotic arms using continual learning,
F. Piqu ´e, H. T. Kalidindi, L. Fruzzetti, C. Laschi, A. Menciassi, and E. Falotico, “Controlling soft robotic arms using continual learning,” IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 5469–5476, 2022
work page 2022
-
[26]
D. Luenberger, “An introduction to observers,”IEEE Transactions on Automatic Control, vol. 16, no. 6, pp. 596–602, 1971
work page 1971
-
[27]
Concur- rent learning for parameter estimation using dynamic state-derivative estimators,
R. Kamalapurkar, B. Reish, G. Chowdhary, and W. E. Dixon, “Concur- rent learning for parameter estimation using dynamic state-derivative estimators,”IEEE Transactions on Automatic Control, vol. 62, no. 7, pp. 3594–3601, 2017
work page 2017
-
[28]
Concurrent learning for convergence in adaptive control without persistency of excitation,
G. Chowdhary and E. Johnson, “Concurrent learning for convergence in adaptive control without persistency of excitation,” in49th IEEE Conference on Decision and Control (CDC), 2010, pp. 3674–3679
work page 2010
-
[29]
Minimum snap trajectory generation and control for quadrotors,
D. Mellinger and V . Kumar, “Minimum snap trajectory generation and control for quadrotors,” in2011 IEEE International Conference on Robotics and Automation (ICRA), 2011, pp. 2520–2525
work page 2011
-
[30]
Differential flatness transformations for aggressive quadrotor flight,
B. Morrell, M. Rigter, G. Merewether, R. Reid, R. Thakker, T. Tzane- tos, V . Rajur, and G. Chamitoff, “Differential flatness transformations for aggressive quadrotor flight,” in2018 IEEE International Confer- ence on Robotics and Automation (ICRA), 2018, pp. 5204–5210
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.