Recognition: 2 theorem links
· Lean TheoremST-BiBench: Benchmarking Multi-Stream Multimodal Coordination in Bimanual Embodied Tasks for MLLMs
Pith reviewed 2026-05-16 05:56 UTC · model grok-4.3
The pith
Multimodal models plan bimanual tasks well but fail at precise physical execution
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
ST-BiBench reveals a persistent coordination paradox in which state-of-the-art MLLMs achieve strong performance on high-level strategic coordination planning yet suffer from perception-logic disconnection and multi-stream interference when performing foundational spatial grounding or synthesizing 16-dimensional continuous actions.
What carries the argument
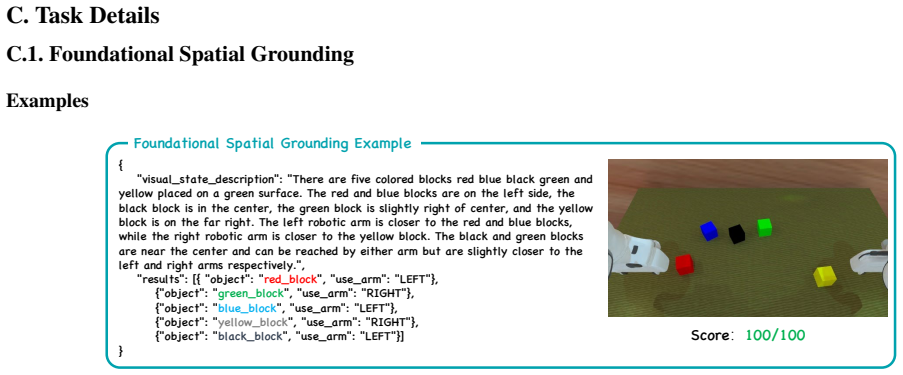
ST-BiBench, a multi-tier evaluation framework that measures Strategic Coordination Planning, Foundational Spatial Grounding, and Fine-Grained Action Control to expose gaps in multi-stream multimodal fusion.
Load-bearing premise
That the chosen tasks and metrics isolate multi-stream interference and spatial misalignment without confounding effects from how visual inputs are rendered or actions are scored.
What would settle it
Running the fine-grained action control tier on a model that scored high on strategic planning and checking whether arm-selection errors or trajectory deviations remain high despite the strong planning scores.
Figures











read the original abstract
Multimodal Large Language Models (MLLMs) have significantly advanced the landscape of embodied AI, yet transitioning to synchronized bimanual coordination introduces formidable challenges in multi-stream multimodal integration. We introduce ST-BiBench, a comprehensive multi-tier framework for evaluating spatio-temporal multimodal coordination. Our approach centers on Strategic Coordination Planning, assessing high-level cross-modal reasoning over multiple action and perception streams. To investigate the "proximity paradox"-where semantically coherent plans fail to align with spatially grounded visual inputs-we incorporate Foundational Spatial Grounding to verify workspace awareness and arm-selection logic. Furthermore, we probe model frontiers through Fine-Grained Action Control, investigating whether MLLMs can directly synthesize high-dimensional continuous action modalities (16-Dim) from complex multimodal metadata. Evaluating 30+ state-of-the-art MLLMs, we uncover a persistent and pervasive "coordination paradox"-a significant gap between high-level strategic reasoning and fine-grained physical execution. Results reveal that while frontier MLLMs excel at logic-driven strategy, they frequently suffer from perception-logic disconnection and multi-stream interference during multimodal fusion. ST-BiBench provides a platform for identifying critical bottlenecks in multi-stream multimodal fusion and cross-modal alignment for complex embodied tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces ST-BiBench, a multi-tier benchmark framework for evaluating spatio-temporal multimodal coordination in bimanual embodied tasks for MLLMs. It assesses three components: Strategic Coordination Planning for high-level cross-modal reasoning, Foundational Spatial Grounding to address the proximity paradox in workspace awareness and arm selection, and Fine-Grained Action Control for synthesizing 16-dimensional continuous actions from multimodal inputs. Evaluation of over 30 state-of-the-art MLLMs reveals a persistent coordination paradox, with strong performance on logic-driven strategy but failures due to perception-logic disconnection and multi-stream interference during fusion.
Significance. If the benchmark tasks and metrics are demonstrated to isolate multi-stream effects without confounding artifacts, this work would be significant for embodied AI by providing a standardized platform to diagnose bottlenecks in MLLM multimodal fusion and cross-modal alignment for complex bimanual scenarios, potentially guiding targeted improvements in perception-action integration.
major comments (2)
- [Abstract and §4] Abstract and §4 (Fine-Grained Action Control): The central claim of a coordination paradox between high-level strategic reasoning and 16-Dim physical execution rests on the assumption that ST-BiBench metrics isolate multi-stream interference; however, no ablations are reported on action scoring tolerances (exact-match vs. continuous distance thresholds) or visual rendering choices (fixed camera views in bimanual workspaces), raising the possibility that observed failures stem from format/viewpoint artifacts rather than fusion limitations.
- [§3 and evaluation tables] §3 (Benchmark Design) and evaluation tables: The paper reports results across 30+ models but provides no quantitative tables with error bars, task-specific success rates, or exclusion criteria for model responses; without these, the magnitude and statistical robustness of the reported gap cannot be verified, weakening the claim of pervasiveness.
minor comments (2)
- [Introduction] The distinction between the 'proximity paradox' and 'coordination paradox' is introduced in the abstract but not explicitly contrasted in the introduction or related work sections; a clarifying sentence would improve readability.
- [Methods] Notation for the 16-Dim action space is used without an explicit definition or example vector in the methods; adding this would aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below and describe the revisions we will incorporate to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract and §4] Abstract and §4 (Fine-Grained Action Control): The central claim of a coordination paradox between high-level strategic reasoning and 16-Dim physical execution rests on the assumption that ST-BiBench metrics isolate multi-stream interference; however, no ablations are reported on action scoring tolerances (exact-match vs. continuous distance thresholds) or visual rendering choices (fixed camera views in bimanual workspaces), raising the possibility that observed failures stem from format/viewpoint artifacts rather than fusion limitations.
Authors: We agree that explicit ablations on scoring tolerances and rendering choices would more rigorously demonstrate isolation of multi-stream effects. Our current metrics follow standard practices in continuous-action embodied benchmarks, and the failure patterns are consistent across model families, but we acknowledge this does not fully rule out artifacts. In the revised version we will add targeted ablations varying exact-match versus distance-based thresholds and alternative camera viewpoints to confirm that the coordination paradox is not driven by these design choices. revision: yes
-
Referee: [§3 and evaluation tables] §3 (Benchmark Design) and evaluation tables: The paper reports results across 30+ models but provides no quantitative tables with error bars, task-specific success rates, or exclusion criteria for model responses; without these, the magnitude and statistical robustness of the reported gap cannot be verified, weakening the claim of pervasiveness.
Authors: We accept that the current presentation lacks the requested statistical detail. The manuscript summarizes aggregate outcomes but omits per-task breakdowns, variance estimates, and response-filtering rules. We will expand §3 and the evaluation tables to include task-specific success rates, error bars computed over repeated evaluation runs, and explicit exclusion criteria (e.g., malformed outputs or format violations). These additions will allow readers to assess the robustness and pervasiveness of the observed gaps. revision: yes
Circularity Check
No significant circularity in benchmark evaluation chain
full rationale
The paper introduces a new benchmark ST-BiBench with defined tasks and metrics for bimanual coordination, then reports empirical performance of 30+ external MLLMs on it. The claimed 'coordination paradox' is an observed gap in those results, not a derived quantity that reduces to the benchmark definition by construction. No self-definitional steps, fitted inputs renamed as predictions, or load-bearing self-citations appear in the provided text. The evaluation uses independent models and is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The chosen bimanual tasks and 16-Dim action space adequately represent real-world coordination challenges
Reference graph
Works this paper leans on
-
[1]
Josh Achiam, Steven Adler, Sandhini Agarwal, Lama Ah- mad, Ilge Akkaya, Florencia Leoni Aleman, Diogo Almeida, Janko Altenschmidt, Sam Altman, Shyamal Anadkat, et al. Gpt-4 technical report.arXiv preprint arXiv:2303.08774,
work page internal anchor Pith review Pith/arXiv arXiv
-
[2]
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
Michael Ahn, Anthony Brohan, Noah Brown, Yevgen Cheb- otar, Omar Cortes, Byron David, Chelsea Finn, Chuyuan Fu, Keerthana Gopalakrishnan, Karol Hausman, et al. Do as i can, not as i say: Grounding language in robotic affordances. arXiv preprint arXiv:2204.01691, 2022. 1
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[3]
Jean-Baptiste Alayrac, Jeff Donahue, Pauline Luc, Antoine Miech, Iain Barr, Yana Hasson, Karel Lenc, Arthur Mensch, Katherine Millican, Malcolm Reynolds, et al. Flamingo: a visual language model for few-shot learning.Advances in neural information processing systems, 35:23716–23736,
-
[4]
Claude 3.7 sonnet and claude code
anthropic. Claude 3.7 sonnet and claude code. https: //www.anthropic.com/news/claude-3-7-so nnet, 2025. 2, S1
work page 2025
-
[5]
anthropic. Introducing claude 4. https://www.anth ropic.com/news/claude-4, 2025. 2, S1
work page 2025
-
[6]
anthropic. Claude sonnet 4.5. https://www.anthro pic.com/claude/sonnet, 2025
work page 2025
-
[7]
Vqa: Visual question answering
Stanislaw Antol, Aishwarya Agrawal, Jiasen Lu, Margaret Mitchell, Dhruv Batra, C Lawrence Zitnick, and Devi Parikh. Vqa: Visual question answering. InProceedings of the IEEE international conference on computer vision, pages 2425– 2433, 2015
work page 2015
-
[8]
Multimodal fusion for mul- timedia analysis: a survey.Multimedia systems, 16(6):345– 379, 2010
Pradeep K Atrey, M Anwar Hossain, Abdulmotaleb El Sad- dik, and Mohan S Kankanhalli. Multimodal fusion for mul- timedia analysis: a survey.Multimedia systems, 16(6):345– 379, 2010. 3
work page 2010
-
[9]
Qwen-VL: A Versatile Vision-Language Model for Understanding, Localization, Text Reading, and Beyond
Jinze Bai, Shuai Bai, Shusheng Yang, Shijie Wang, Sinan Tan, Peng Wang, Junyang Lin, Chang Zhou, and Jingren Zhou. Qwen-vl: A versatile vision-language model for understanding, localization, text reading, and beyond.arXiv preprint arXiv:2308.12966, 2023. 2, S2
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[10]
Qwen3-vl technical report, 2025
Shuai Bai, Yuxuan Cai, Ruizhe Chen, Keqin Chen, Xionghui Chen, Zesen Cheng, Lianghao Deng, Wei Ding, Chang Gao, Chunjiang Ge, Wenbin Ge, Zhifang Guo, Qidong Huang, Jie Huang, Fei Huang, Binyuan Hui, Shutong Jiang, Zhaohai Li, Mingsheng Li, Mei Li, Kaixin Li, Zicheng Lin, Jun- yang Lin, Xuejing Liu, Jiawei Liu, Chenglong Liu, Yang Liu, Dayiheng Liu, Shixua...
work page 2025
-
[11]
Shuai Bai, Keqin Chen, Xuejing Liu, Jialin Wang, Wenbin Ge, Sibo Song, Kai Dang, Peng Wang, Shijie Wang, Jun Tang, Humen Zhong, Yuanzhi Zhu, Mingkun Yang, Zhao- hai Li, Jianqiang Wan, Pengfei Wang, Wei Ding, Zheren Fu, Yiheng Xu, Jiabo Ye, Xi Zhang, Tianbao Xie, Zesen Cheng, Hang Zhang, Zhibo Yang, Haiyang Xu, and Jun- yang Lin. Qwen2.5-vl technical repor...
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[12]
Tadas Baltruˇsaitis, Chaitanya Ahuja, and Louis-Philippe Morency. Multimodal machine learning: A survey and tax- onomy.IEEE transactions on pattern analysis and machine intelligence, 41(2):423–443, 2018. 3
work page 2018
-
[13]
Rt-h: Action hierarchies using language.arXiv preprint arXiv:2403.01823, 2024
Suneel Belkhale, Tianli Ding, Ted Xiao, Pierre Sermanet, Quon Vuong, Jonathan Tompson, Yevgen Chebotar, De- bidatta Dwibedi, and Dorsa Sadigh. Rt-h: Action hierarchies using language.arXiv preprint arXiv:2403.01823, 2024
-
[14]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
Kevin Black, Noah Brown, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, Lachy Groom, Karol Hausman, Brian Ichter, et al. π0: A vision-language- action flow model for general robot control.arXiv preprint arXiv:2410.24164, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[15]
Hudson, Ehsan Adeli, Russ Altman, Simran Arora, Sydney von Arx, Michael S
Rishi Bommasani, Drew A. Hudson, Ehsan Adeli, Russ Altman, Simran Arora, Sydney von Arx, Michael S. Bern- stein, Jeannette Bohg, Antoine Bosselut, Emma Brun- skill, Erik Brynjolfsson, Shyamal Buch, Dallas Card, Ro- drigo Castellon, Niladri Chatterji, Annie Chen, Kathleen Creel, Jared Quincy Davis, Dora Demszky, Chris Donahue, Moussa Doumbouya, Esin Durmus...
work page 2022
-
[16]
RT-1: Robotics Transformer for Real-World Control at Scale
Anthony Brohan, Noah Brown, Justice Carbajal, Yevgen Chebotar, Joseph Dabis, Chelsea Finn, Keerthana Gopalakr- ishnan, Karol Hausman, Alex Herzog, Jasmine Hsu, et al. Rt-1: Robotics transformer for real-world control at scale. arXiv preprint arXiv:2212.06817, 2022. 3
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[17]
RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control
Anthony Brohan, Noah Brown, Justice Carbajal, Yevgen Chebotar, Xi Chen, Krzysztof Choromanski, Tianli Ding, Danny Driess, Avinava Dubey, Chelsea Finn, Pete Florence, Chuyuan Fu, Montse Gonzalez Arenas, Keerthana Gopalakr- ishnan, Kehang Han, Karol Hausman, Alex Herzog, Jasmine Hsu, Brian Ichter, Alex Irpan, Nikhil Joshi, Ryan Julian, Dmitry Kalashnikov, Y...
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[18]
Do as i can, not as i say: Grounding language in robotic affordances
Anthony Brohan, Yevgen Chebotar, Chelsea Finn, Karol Hausman, Alexander Herzog, Daniel Ho, Julian Ibarz, Alex Irpan, Eric Jang, Ryan Julian, et al. Do as i can, not as i say: Grounding language in robotic affordances. InConference on robot learning, pages 287–318. PMLR, 2023
work page 2023
-
[19]
Language models are few-shot learners
Tom Brown, Benjamin Mann, Nick Ryder, Melanie Sub- biah, Jared D Kaplan, Prafulla Dhariwal, Arvind Neelakan- tan, Pranav Shyam, Girish Sastry, Amanda Askell, Sand- hini Agarwal, Ariel Herbert-V oss, Gretchen Krueger, Tom Henighan, Rewon Child, Aditya Ramesh, Daniel Ziegler, Jeffrey Wu, Clemens Winter, Chris Hesse, Mark Chen, Eric Sigler, Mateusz Litwin, S...
work page 1901
-
[20]
Matthew Chang, Gunjan Chhablani, Alexander Clegg, Mikael Dallaire Cote, Ruta Desai, Michal Hlavac, Vladimir Karashchuk, Jacob Krantz, Roozbeh Mottaghi, Priyam Parashar, et al. Partnr: A benchmark for planning and reasoning in embodied multi-agent tasks.arXiv preprint arXiv:2411.00081, 2024
-
[21]
Spatialvlm: Endow- ing vision-language models with spatial reasoning capabili- ties
Boyuan Chen, Zhuo Xu, Sean Kirmani, Brain Ichter, Dorsa Sadigh, Leonidas Guibas, and Fei Xia. Spatialvlm: Endow- ing vision-language models with spatial reasoning capabili- ties. InProceedings of the IEEE/CVF Conference on Com- puter Vision and Pattern Recognition, pages 14455–14465,
-
[22]
Chubin Chen, Sujie Hu, Jiashu Zhu, Meiqi Wu, Jintao Chen, Yanxun Li, Nisha Huang, Chengyu Fang, Jiahong Wu, Xi- angxiang Chu, et al. Taming preference mode collapse via directional decoupling alignment in diffusion reinforcement learning.arXiv preprint arXiv:2512.24146, 2025. S1
-
[23]
Chubin Chen, Jiashu Zhu, Xiaokun Feng, et al. S2-guidance: Stochastic self guidance for training-free enhancement of diffusion models.arXiv preprint arXiv:2508.12880, 2025. S1
-
[24]
Roboscript: Code generation for free-form manipulation tasks across real and simulation
Junting Chen, Yao Mu, Qiaojun Yu, Tianming Wei, Silang Wu, Zhecheng Yuan, Zhixuan Liang, Chao Yang, Kaipeng Zhang, Wenqi Shao, et al. Roboscript: Code generation for free-form manipulation tasks across real and simulation. arXiv preprint arXiv:2402.14623, 2024
-
[25]
Tianxing Chen, Zanxin Chen, Baijun Chen, Zijian Cai, Yibin Liu, Zixuan Li, Qiwei Liang, Xianliang Lin, Yiheng Ge, Zhenyu Gu, et al. Robotwin 2.0: A scalable data gen- erator and benchmark with strong domain randomization for robust bimanual robotic manipulation.arXiv preprint arXiv:2506.18088, 2025. 3
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[26]
Tianxing Chen, Kaixuan Wang, Zhaohui Yang, Yuhao Zhang, Zanxin Chen, Baijun Chen, Wanxi Dong, Ziyuan Liu, Dong Chen, Tianshuo Yang, et al. Benchmarking gen- eralizable bimanual manipulation: Robotwin dual-arm col- laboration challenge at cvpr 2025 meis workshop.arXiv preprint arXiv:2506.23351, 2025
-
[27]
Yaran Chen, Wenbo Cui, Yuanwen Chen, Mining Tan, Xinyao Zhang, Dongbin Zhao, and He Wang. Robogpt: an intelligent agent of making embodied long-term decisions for daily instruction tasks.arXiv preprint arXiv:2311.15649, 2023
-
[28]
Zhe Chen, Weiyun Wang, Yue Cao, Yangzhou Liu, Zhang- wei Gao, Erfei Cui, Jinguo Zhu, Shenglong Ye, Hao Tian, Zhaoyang Liu, et al. Expanding performance boundaries of open-source multimodal models with model, data, and test-time scaling.arXiv preprint arXiv:2412.05271, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[29]
How Far Are We to GPT-4V? Closing the Gap to Commercial Multimodal Models with Open-Source Suites
Zhe Chen, Weiyun Wang, Hao Tian, Shenglong Ye, Zhang- wei Gao, Erfei Cui, Wenwen Tong, Kongzhi Hu, Jiapeng Luo, Zheng Ma, et al. How far are we to gpt-4v? closing the gap to commercial multimodal models with open-source suites.arXiv preprint arXiv:2404.16821, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[30]
Internvl: Scaling up vision foundation models and aligning for generic visual-linguistic tasks
Zhe Chen, Jiannan Wu, Wenhai Wang, Weijie Su, Guo Chen, Sen Xing, Muyan Zhong, Qinglong Zhang, Xizhou Zhu, Lewei Lu, et al. Internvl: Scaling up vision foundation models and aligning for generic visual-linguistic tasks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 24185–24198, 2024. 2, S2
work page 2024
-
[31]
Embodiedeval: Evaluate multimodal llms as embodied agents.arXiv preprint arXiv:2501.11858, 2025
Zhili Cheng, Yuge Tu, Ran Li, Shiqi Dai, Jinyi Hu, Shengding Hu, Jiahao Li, Yang Shi, Tianyu Yu, Weize Chen, et al. Embodiedeval: Evaluate multimodal llms as embodied agents.arXiv preprint arXiv:2501.11858, 2025
-
[32]
Cheng Chi, Zhenjia Xu, Siyuan Feng, Eric Cousineau, Yilun Du, Benjamin Burchfiel, Russ Tedrake, and Shuran Song. Diffusion policy: Visuomotor policy learning via action diffusion.The International Journal of Robotics Research, 44(10-11):1684–1704, 2025
work page 2025
-
[33]
Jae-Woo Choi, Youngwoo Yoon, Hyobin Ong, Jaehong Kim, and Minsu Jang. Lota-bench: Benchmarking language- oriented task planners for embodied agents.arXiv preprint arXiv:2402.08178, 2024
-
[34]
Gheorghe Comanici, Eric Bieber, Mike Schaekermann, Ice Pasupat, Noveen Sachdeva, Inderjit Dhillon, Marcel Blis- tein, Ori Ram, Dan Zhang, Evan Rosen, et al. Gemini 2.5: Pushing the frontier with advanced reasoning, multimodality, long context, and next generation agentic capabilities.arXiv preprint arXiv:2507.06261, 2025. 2, S1
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[35]
Wenliang Dai, Junnan Li, Dongxu Li, Anthony Tiong, Junqi Zhao, Weisheng Wang, Boyang Li, Pascale N Fung, and Steven Hoi. Instructblip: Towards general-purpose vision- language models with instruction tuning.Advances in neural information processing systems, 36:49250–49267, 2023
work page 2023
-
[36]
Danny Driess, Fei Xia, Mehdi S. M. Sajjadi, Corey Lynch, Aakanksha Chowdhery, Brian Ichter, Ayzaan Wahid, Jonathan Tompson, Quan Vuong, Tianhe Yu, Wenlong Huang, Yevgen Chebotar, Pierre Sermanet, Daniel Duck- worth, Sergey Levine, Vincent Vanhoucke, Karol Hausman, Marc Toussaint, Klaus Greff, Andy Zeng, Igor Mordatch, and Pete Florence. Palm-e: An embodie...
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[37]
Tenenbaum, Leslie Kaelbling, Andy Zeng, and Jonathan Tompson
Yilun Du, Mengjiao Yang, Pete Florence, Fei Xia, Ayzaan Wahid, Brian Ichter, Pierre Sermanet, Tianhe Yu, Pieter Abbeel, Joshua B. Tenenbaum, Leslie Kaelbling, Andy Zeng, and Jonathan Tompson. Video language planning, 2023
work page 2023
-
[38]
Agent ai: Survey- ing the horizons of multimodal interaction.arXiv preprint arXiv:2401.03568, 2024
Zane Durante, Qiuyuan Huang, Naoki Wake, Ran Gong, Jae Sung Park, Bidipta Sarkar, Rohan Taori, Yusuke Noda, Demetri Terzopoulos, Yejin Choi, et al. Agent ai: Survey- ing the horizons of multimodal interaction.arXiv preprint arXiv:2401.03568, 2024
-
[39]
Convolutional two-stream network fusion for video action recognition
Christoph Feichtenhofer, Axel Pinz, and Andrew Zisserman. Convolutional two-stream network fusion for video action recognition. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 1933–1941,
work page 1933
-
[40]
Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation
Zipeng Fu, Tony Z Zhao, and Chelsea Finn. Mobile aloha: Learning bimanual mobile manipulation with low-cost whole-body teleoperation.arXiv preprint arXiv:2401.02117,
work page internal anchor Pith review Pith/arXiv arXiv
-
[41]
Physi- cally grounded vision-language models for robotic manipu- lation
Jensen Gao, Bidipta Sarkar, Fei Xia, Ted Xiao, Jiajun Wu, Brian Ichter, Anirudha Majumdar, and Dorsa Sadigh. Physi- cally grounded vision-language models for robotic manipu- lation. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 12462–12469. IEEE, 2024
work page 2024
-
[42]
Google. Gemini 2.0 flash. https://docs.cloud.g oogle.com/vertex-ai/generative-ai/docs/ models/gemini/2-0-flash, 2025. 2, S1
work page 2025
-
[43]
Making the v in vqa matter: Elevating the role of image understanding in visual question answer- ing
Yash Goyal, Tejas Khot, Douglas Summers-Stay, Dhruv Ba- tra, and Devi Parikh. Making the v in vqa matter: Elevating the role of image understanding in visual question answer- ing. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 6904–6913, 2017
work page 2017
-
[44]
Twin: Two-handed intelligent bench- mark for bimanual manipulation
Markus Grotz, Mohit Shridhar, Yu-Wei Chao, Tamim As- four, and Dieter Fox. Twin: Two-handed intelligent bench- mark for bimanual manipulation. In2025 IEEE Interna- tional Conference on Robotics and Automation (ICRA), pages 7945–7951. IEEE, 2025. 3
work page 2025
-
[45]
Jiayuan Gu, Fanbo Xiang, Xuanlin Li, Zhan Ling, Xiqiang Liu, Tongzhou Mu, Yihe Tang, Stone Tao, Xinyue Wei, Yunchao Yao, et al. Maniskill2: A unified benchmark for generalizable manipulation skills.arXiv preprint arXiv:2302.04659, 2023
-
[46]
Visual program- ming: Compositional visual reasoning without training
Tanmay Gupta and Aniruddha Kembhavi. Visual program- ming: Compositional visual reasoning without training. In Proceedings of the IEEE/CVF conference on computer vi- sion and pattern recognition, pages 14953–14962, 2023
work page 2023
-
[47]
Mengkang Hu, Tianxing Chen, Qiguang Chen, Yao Mu, Wenqi Shao, and Ping Luo. Hiagent: Hierarchical work- ing memory management for solving long-horizon agent tasks with large language model. InProceedings of the 63rd Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), pages 32779–32798, 2025
work page 2025
-
[48]
Mengkang Hu, Tianxing Chen, Yude Zou, Yuheng Lei, Qiguang Chen, Ming Li, Yao Mu, Hongyuan Zhang, Wenqi Shao, and Ping Luo. Text2world: Benchmarking large lan- guage models for symbolic world model generation.arXiv preprint arXiv:2502.13092, 2025
-
[49]
Copa: General robotic manipulation through spatial constraints of parts with foundation models
Haoxu Huang, Fanqi Lin, Yingdong Hu, Shengjie Wang, and Yang Gao. Copa: General robotic manipulation through spatial constraints of parts with foundation models. In2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 9488–9495. IEEE, 2024
work page 2024
-
[50]
Shijie Huang, Yiren Song, Yuxuan Zhang, Hailong Guo, Xueyin Wang, Mike Zheng Shou, and Jiaming Liu. Photodoodle: Learning artistic image editing from few-shot pairwise data.arXiv preprint arXiv:2502.14397, 2025. S1
-
[51]
Language models as zero-shot planners: Extract- ing actionable knowledge for embodied agents
Wenlong Huang, Pieter Abbeel, Deepak Pathak, and Igor Mordatch. Language models as zero-shot planners: Extract- ing actionable knowledge for embodied agents. InInterna- tional conference on machine learning, pages 9118–9147. PMLR, 2022. 1, 3
work page 2022
-
[52]
Inner Monologue: Embodied Reasoning through Planning with Language Models
Wenlong Huang, Fei Xia, Ted Xiao, Harris Chan, Jacky Liang, Pete Florence, Andy Zeng, Jonathan Tompson, Igor Mordatch, Yevgen Chebotar, et al. Inner monologue: Em- bodied reasoning through planning with language models. arXiv preprint arXiv:2207.05608, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[53]
VoxPoser: Composable 3D Value Maps for Robotic Manipulation with Language Models
Wenlong Huang, Chen Wang, Ruohan Zhang, Yunzhu Li, Jiajun Wu, and Li Fei-Fei. V oxposer: Composable 3d value maps for robotic manipulation with language models.arXiv preprint arXiv:2307.05973, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[54]
Wenlong Huang, Fei Xia, Dhruv Shah, Danny Driess, Andy Zeng, Yao Lu, Pete Florence, Igor Mordatch, Sergey Levine, Karol Hausman, et al. Grounded decoding: Guiding text generation with grounded models for embodied agents.Ad- vances in Neural Information Processing Systems, 36:59636– 59661, 2023
work page 2023
-
[55]
ReKep: Spatio-Temporal Reasoning of Relational Keypoint Constraints for Robotic Manipulation
Wenlong Huang, Chen Wang, Yunzhu Li, Ruohan Zhang, and Li Fei-Fei. Rekep: Spatio-temporal reasoning of rela- tional keypoint constraints for robotic manipulation.arXiv preprint arXiv:2409.01652, 2024
work page internal anchor Pith review arXiv 2024
-
[56]
brian ichter, Anthony Brohan, Yevgen Chebotar, Chelsea Finn, Karol Hausman, Alexander Herzog, Daniel Ho, Julian Ibarz, Alex Irpan, Eric Jang, Ryan Julian, Dmitry Kalash- nikov, Sergey Levine, Yao Lu, Carolina Parada, Kanishka Rao, Pierre Sermanet, Alexander T Toshev, Vincent Van- houcke, Fei Xia, Ted Xiao, Peng Xu, Mengyuan Yan, Noah Brown, Michael Ahn, O...
work page 2023
-
[57]
Stephen James, Zicong Ma, David Rovick Arrojo, and An- drew J Davison. Rlbench: The robot learning benchmark & learning environment.IEEE Robotics and Automation Letters, 5(2):3019–3026, 2020
work page 2020
-
[58]
Vima: General robot manipulation with multimodal prompts
Yunfan Jiang, Agrim Gupta, Zichen Zhang, Guanzhi Wang, Yongqiang Dou, Yanjun Chen, Li Fei-Fei, Anima Anand- kumar, Yuke Zhu, and Linxi Fan. Vima: General robot manipulation with multimodal prompts. InFortieth Interna- tional Conference on Machine Learning, 2023. 1
work page 2023
-
[59]
OpenVLA: An Open-Source Vision-Language-Action Model
Moo Jin Kim, Karl Pertsch, Siddharth Karamcheti, Ted Xiao, Ashwin Balakrishna, Suraj Nair, Rafael Rafailov, Ethan Foster, Grace Lam, Pannag Sanketi, et al. Openvla: An open-source vision-language-action model.arXiv preprint arXiv:2406.09246, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[60]
AI2-THOR: An Interactive 3D Environment for Visual AI
Eric Kolve, Roozbeh Mottaghi, Winson Han, Eli VanderBilt, Luca Weihs, Alvaro Herrasti, Matt Deitke, Kiana Ehsani, Daniel Gordon, Yuke Zhu, et al. Ai2-thor: An interactive 3d environment for visual ai.arXiv preprint arXiv:1712.05474, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[61]
Zhiqian Lan, Yuxuan Jiang, Ruiqi Wang, Xuanbing Xie, Rongkui Zhang, Yicheng Zhu, Peihang Li, Tianshuo Yang, Tianxing Chen, Haoyu Gao, et al. Autobio: A simulation and benchmark for robotic automation in digital biology laboratory.arXiv preprint arXiv:2505.14030, 2025
-
[62]
Chengshu Li, Fei Xia, Roberto Mart´ın-Mart´ın, Michael Lin- gelbach, Sanjana Srivastava, Bokui Shen, Kent Vainio, Cem Gokmen, Gokul Dharan, Tanish Jain, et al. igibson 2.0: Object-centric simulation for robot learning of everyday household tasks.arXiv preprint arXiv:2108.03272, 2021
-
[63]
Behavior-1k: A benchmark for embodied ai with 1,000 everyday activities and realistic simulation
Chengshu Li, Ruohan Zhang, Josiah Wong, Cem Gokmen, Sanjana Srivastava, Roberto Mart ´ın-Mart´ın, Chen Wang, Gabrael Levine, Michael Lingelbach, Jiankai Sun, et al. Behavior-1k: A benchmark for embodied ai with 1,000 everyday activities and realistic simulation. InConference on Robot Learning, pages 80–93. PMLR, 2023
work page 2023
-
[64]
Junnan Li, Dongxu Li, Silvio Savarese, and Steven Hoi. Blip- 2: Bootstrapping language-image pre-training with frozen image encoders and large language models. InInterna- tional conference on machine learning, pages 19730–19742. PMLR, 2023. 3
work page 2023
-
[65]
Manling Li, Shiyu Zhao, Qineng Wang, Kangrui Wang, Yu Zhou, Sanjana Srivastava, Cem Gokmen, Tony Lee, Erran Li Li, Ruohan Zhang, et al. Embodied agent interface: Bench- marking llms for embodied decision making.Advances in Neural Information Processing Systems, 37:100428–100534, 2024
work page 2024
-
[66]
Code as Policies: Language Model Programs for Embodied Control
Jacky Liang, Wenlong Huang, Fei Xia, Peng Xu, Karol Hausman, Brian Ichter, Pete Florence, and Andy Zeng. Code as policies: Language model programs for embodied control. arXiv preprint arXiv:2209.07753, 2022. 3
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[67]
Visual instruction tuning.Advances in neural information processing systems, 36:34892–34916, 2023
Haotian Liu, Chunyuan Li, Qingyang Wu, and Yong Jae Lee. Visual instruction tuning.Advances in neural information processing systems, 36:34892–34916, 2023. 3
work page 2023
-
[68]
A Survey on Hallucination in Large Vision-Language Models
Hanchao Liu, Wenyuan Xue, Yifei Chen, Dapeng Chen, Xiutian Zhao, Ke Wang, Liping Hou, Rongjun Li, and Wei Peng. A survey on hallucination in large vision-language models.arXiv preprint arXiv:2402.00253, 2024. 3
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[69]
RDT-1B: a Diffusion Foundation Model for Bimanual Manipulation
Songming Liu, Lingxuan Wu, Bangguo Li, Hengkai Tan, Huayu Chen, Zhengyi Wang, Ke Xu, Hang Su, and Jun Zhu. Rdt-1b: a diffusion foundation model for bimanual manipulation.arXiv preprint arXiv:2410.07864, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[70]
AgentBench: Evaluating LLMs as Agents
Xiao Liu, Hao Yu, Hanchen Zhang, Yifan Xu, Xuanyu Lei, Hanyu Lai, Yu Gu, Hangliang Ding, Kaiwen Men, Kejuan Yang, et al. Agentbench: Evaluating llms as agents.arXiv preprint arXiv:2308.03688, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[71]
Xiao Liu, Tianjie Zhang, Yu Gu, Iat Long Iong, Yifan Xu, Xixuan Song, Shudan Zhang, Hanyu Lai, Xinyi Liu, Han- lin Zhao, et al. Visualagentbench: Towards large multi- modal models as visual foundation agents.arXiv preprint arXiv:2408.06327, 2024
-
[72]
Shiyin Lu, Yang Li, Qing-Guo Chen, Zhao Xu, Weihua Luo, Kaifu Zhang, and Han-Jia Ye. Ovis: Structural em- bedding alignment for multimodal large language model. arXiv:2405.20797, 2024. 2, S2
-
[73]
Shiyin Lu, Yang Li, Yu Xia, Yuwei Hu, Shanshan Zhao, Yanqing Ma, Zhichao Wei, Yinglun Li, Lunhao Duan, Jian- shan Zhao, Yuxuan Han, Haijun Li, Wanying Chen, Junke Tang, Chengkun Hou, Zhixing Du, Tianli Zhou, Wenjie Zhang, Huping Ding, Jiahe Li, Wen Li, Gui Hu, Yiliang Gu, Siran Yang, Jiamang Wang, Hailong Sun, Yibo Wang, Hui Sun, Jinlong Huang, Yuping He,...
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[74]
Follow your pose: Pose- guided text-to-video generation using pose-free videos
Yue Ma, Yingqing He, Xiaodong Cun, Xintao Wang, Siran Chen, Xiu Li, and Qifeng Chen. Follow your pose: Pose- guided text-to-video generation using pose-free videos. In Proceedings of the AAAI Conference on Artificial Intelli- gence, pages 4117–4125, 2024. S1
work page 2024
-
[75]
Follow-your-emoji: Fine-controllable and expressive freestyle portrait animation
Yue Ma, Hongyu Liu, Hongfa Wang, Heng Pan, Yingqing He, Junkun Yuan, Ailing Zeng, Chengfei Cai, Heung-Yeung Shum, Wei Liu, et al. Follow-your-emoji: Fine-controllable and expressive freestyle portrait animation. InSIGGRAPH Asia 2024 Conference Papers, pages 1–12, 2024
work page 2024
-
[76]
Controllable video generation: A survey.arXiv preprint arXiv:2507.16869, 2025
Yue Ma, Kunyu Feng, Zhongyuan Hu, Xinyu Wang, Yucheng Wang, Mingzhe Zheng, Xuanhua He, Chenyang Zhu, Hongyu Liu, Yingqing He, et al. Controllable video generation: A survey.arXiv preprint arXiv:2507.16869, 2025
-
[77]
Yue Ma, Kunyu Feng, Xinhua Zhang, Hongyu Liu, David Junhao Zhang, Jinbo Xing, Yinhan Zhang, Ayden Yang, Zeyu Wang, and Qifeng Chen. Follow-your-creation: Empowering 4d creation through video inpainting.arXiv preprint arXiv:2506.04590, 2025. S1
-
[78]
Follow-your-click: Open-domain regional image animation via motion prompts
Yue Ma, Yingqing He, Hongfa Wang, Andong Wang, Leqi Shen, Chenyang Qi, Jixuan Ying, Chengfei Cai, Zhifeng Li, Heung-Yeung Shum, et al. Follow-your-click: Open-domain regional image animation via motion prompts. InProceed- ings of the AAAI Conference on Artificial Intelligence, pages 6018–6026, 2025
work page 2025
-
[79]
Yue Ma, Yulong Liu, Qiyuan Zhu, Ayden Yang, Kunyu Feng, Xinhua Zhang, Zhifeng Li, Sirui Han, Chenyang Qi, and Qifeng Chen. Follow-your-motion: Video motion transfer via efficient spatial-temporal decoupled finetuning.arXiv preprint arXiv:2506.05207, 2025. S1
-
[80]
Yue Ma, Zexuan Yan, Hongyu Liu, Hongfa Wang, Heng Pan, Yingqing He, Junkun Yuan, Ailing Zeng, Chengfei Cai, Heung-Yeung Shum, et al. Follow-your-emoji-faster: Towards efficient, fine-controllable, and expressive freestyle portrait animation.arXiv preprint arXiv:2509.16630, 2025. S1
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.