One Hand to Rule Them All: Canonical Representations for Unified Dexterous Manipulation
Pith reviewed 2026-05-21 12:25 UTC · model grok-4.3
The pith
A parameterized canonical representation unifies structurally diverse dexterous hands for cross-embodiment policy learning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
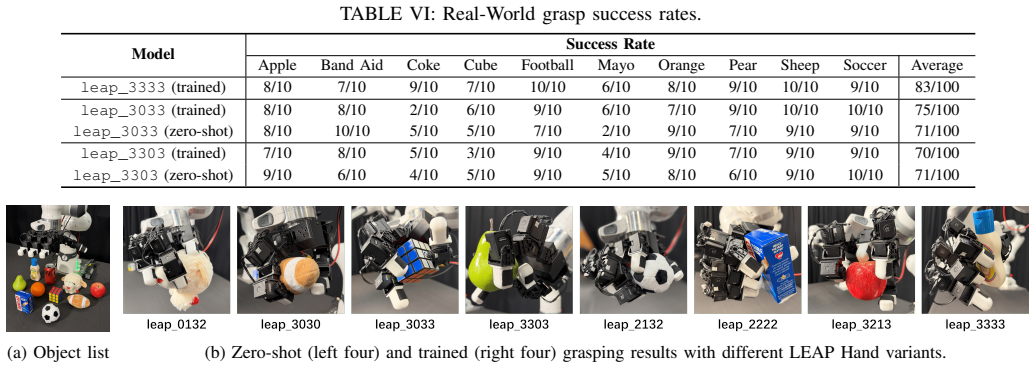
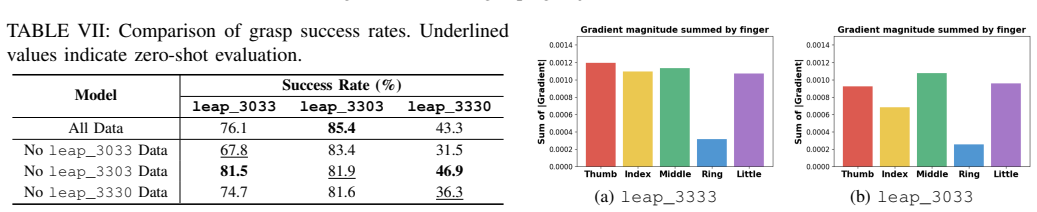
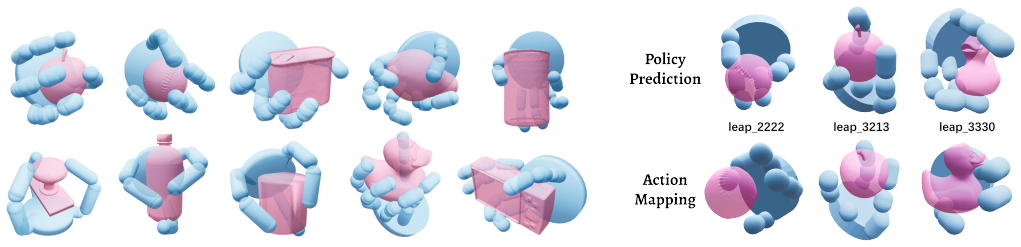
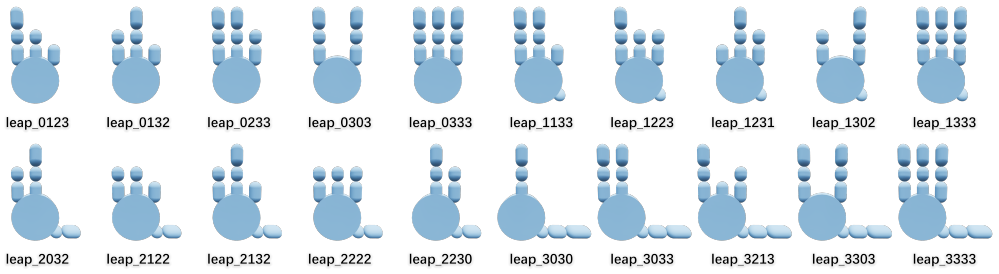
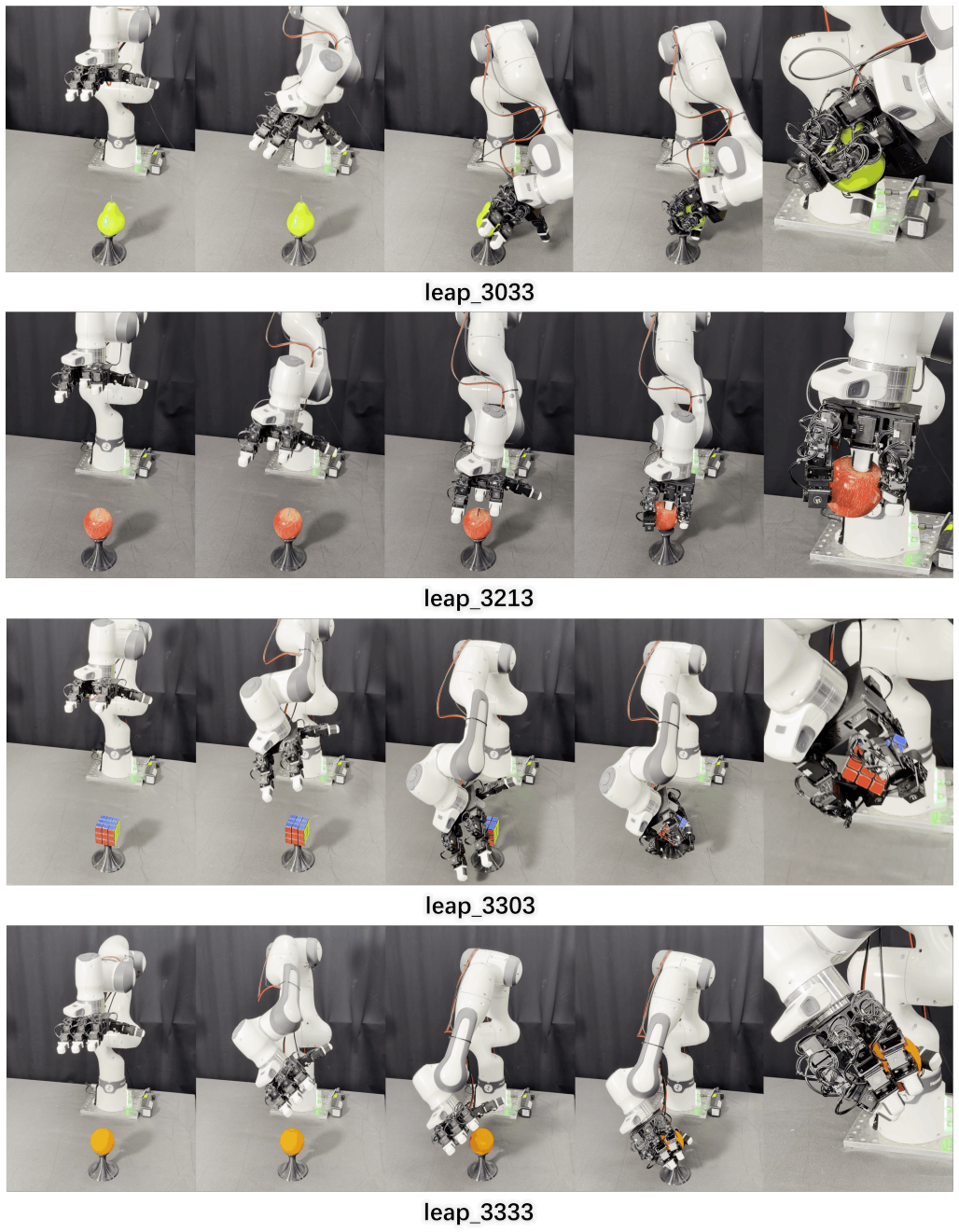
The authors establish that a single parameterized canonical representation, consisting of a unified parameter space and a canonical URDF format, captures essential morphological and kinematic variations while standardizing the action space and preserving dynamic properties of original URDFs. Conditioning policies on this representation enables effective cross-embodiment learning, as demonstrated by a grasping policy that achieves 81.9 percent zero-shot success on an unseen three-finger LEAP Hand in real-world tasks.
What carries the argument
Parameterized canonical representation comprising a unified parameter space for morphology and kinematics plus a canonical URDF that standardizes actions while preserving original dynamics.
If this is right
- A single policy can be trained once and deployed on multiple hand designs by feeding the appropriate canonical parameters at inference time.
- Interpolation in the learned latent manifold produces intermediate hand morphologies that remain kinematically valid and dynamically consistent.
- Action spaces become directly comparable across embodiments, simplifying reward design and data sharing for cross-hand learning.
- Zero-shot transfer becomes feasible for any hand whose parameters lie within the spanned space without additional fine-tuning.
Where Pith is reading between the lines
- Future work could extend the same canonical form to full arm-plus-hand systems or to non-anthropomorphic grippers by adding a small number of additional parameters.
- The latent manifold might support morphology optimization: searching for an ideal hand shape for a given task by moving within the learned space rather than enumerating discrete designs.
- If the representation proves sufficient, simulation datasets collected on one canonical hand could be reused to train policies for many physical hands with minimal domain adaptation.
Load-bearing premise
The chosen parameters fully describe the morphological and kinematic features that matter for successful policy transfer across hand designs.
What would settle it
Train the same conditioned policy on a new hand whose kinematic structure falls outside the defined parameter space and measure whether zero-shot success drops sharply below the reported rates on covered morphologies.
Figures








read the original abstract
Dexterous manipulation policies today largely assume fixed hand designs, severely restricting their generalization to new embodiments with varied kinematic and structural layouts. To overcome this limitation, we introduce a parameterized canonical representation that unifies a broad spectrum of dexterous hand architectures. It comprises a unified parameter space and a canonical URDF format, offering three key advantages. 1) The parameter space captures essential morphological and kinematic variations for effective conditioning in learning algorithms. 2) A structured latent manifold can be learned over our space, where interpolations between embodiments yield smooth and physically meaningful morphology transitions. 3) The canonical URDF standardizes the action space while preserving dynamic and functional properties of the original URDFs, enabling efficient and reliable cross-embodiment policy learning. We validate these advantages through extensive analysis and experiments, including grasp policy replay, VAE latent encoding, and cross-embodiment zero-shot transfer. Specifically, we train a VAE on the unified representation to obtain a compact, semantically rich latent embedding, and develop a grasping policy conditioned on the canonical representation that generalizes across dexterous hands. We demonstrate, through simulation and real-world tasks on unseen morphologies (e.g., 81.9% zero-shot success rate on 3-finger LEAP Hand), that our framework unifies both the representational and action spaces of structurally diverse hands, providing a scalable foundation for cross-hand learning toward universal dexterous manipulation. Project Page: https://zhenyuwei2003.github.io/OHRA/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a parameterized canonical representation for unifying diverse dexterous hand architectures via a unified parameter space and canonical URDF format. It learns a VAE over this space to produce a structured latent manifold and conditions a grasping policy on the canonical representation, reporting zero-shot transfer to unseen morphologies including an 81.9% success rate on the 3-finger LEAP Hand in simulation and real-world tasks.
Significance. If the unification is shown to preserve essential dynamics, the framework could provide a practical foundation for cross-embodiment policy learning in dexterous manipulation, reducing the need for hand-specific retraining. The combination of morphological parameterization, latent interpolation, and empirical zero-shot results represents a concrete step toward scalable universal manipulation policies.
major comments (1)
- [Abstract] Abstract: The central claim that the canonical URDF 'standardizes the action space while preserving dynamic and functional properties of the original URDFs' is load-bearing for the reported zero-shot transfer (e.g., 81.9% on LEAP Hand) but receives no quantitative validation such as forward-dynamics error, mass/inertia mismatch, joint-limit fidelity, or grasp-quality metrics between original and canonical URDFs. Without such checks, distortions in contact dynamics or actuator behavior could undermine the transfer assumption.
minor comments (2)
- [Abstract] The abstract states results from VAE encoding and policy conditioning but omits architecture details, training hyperparameters, baseline comparisons, and error bars or trial counts for the 81.9% figure.
- Notation for the unified parameter space should be introduced with an explicit table or equation listing all morphological and kinematic parameters and their ranges.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comment point by point below and outline the revisions we will make.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the canonical URDF 'standardizes the action space while preserving dynamic and functional properties of the original URDFs' is load-bearing for the reported zero-shot transfer (e.g., 81.9% on LEAP Hand) but receives no quantitative validation such as forward-dynamics error, mass/inertia mismatch, joint-limit fidelity, or grasp-quality metrics between original and canonical URDFs. Without such checks, distortions in contact dynamics or actuator behavior could undermine the transfer assumption.
Authors: We agree that the manuscript would be strengthened by explicit quantitative validation of the dynamic and functional preservation between original and canonical URDFs. The canonical URDF is constructed by retargeting joint axes, link geometries, and actuator parameters from each source URDF into a standardized kinematic template while retaining the original numerical values for masses, inertias, joint limits, and friction coefficients; this design choice is intended to minimize distortion. However, we did not report direct error metrics in the initial submission. In the revised version we will add a dedicated analysis (new subsection in Section 4 or Appendix) that computes: (i) forward-dynamics rollout error (position/velocity RMSE over 100 random torque sequences), (ii) mass/inertia mismatch (relative L2 error per link), (iii) joint-limit fidelity (percentage of limits preserved exactly), and (iv) grasp-quality metrics (epsilon and volume of the grasp wrench space) evaluated on a common set of 50 grasps for each hand. These results will be presented alongside the existing zero-shot transfer numbers to directly address the concern. The 81.9 % success on the unseen LEAP Hand remains an empirical demonstration of practical transfer, but we concur that the additional metrics will make the preservation claim more rigorous. revision: yes
Circularity Check
No circularity: new canonical representation and empirical cross-embodiment results are independent of fitted inputs or self-referential definitions.
full rationale
The paper introduces a parameterized canonical representation and canonical URDF as design choices, then reports empirical results from VAE latent encoding and conditioned grasping policies that achieve zero-shot transfer (e.g., 81.9% on LEAP Hand). No derivation step reduces a claimed prediction or preservation property to a quantity defined by the same fitted parameters or by construction within the paper's equations. The unification and preservation claims are supported by separate validation experiments rather than tautological equivalence, making the central claims self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- Morphological and kinematic parameters
axioms (1)
- domain assumption Interpolations in the latent manifold yield smooth and physically meaningful morphology transitions
invented entities (1)
-
Canonical URDF format
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We introduce a parameterized canonical representation that unifies a broad spectrum of dexterous hand architectures. It comprises a unified parameter space and a canonical URDF format...
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The canonical URDF standardizes the action space while preserving dynamic and functional properties of the original URDFs
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
EgoKit: Towards Unified Low-Cost Egocentric Data Collection with Heterogeneous Devices
EgoKit is a new toolkit and accessory set that unifies egocentric video collection with wrist views across heterogeneous consumer devices using a consistent interface and log format.
Reference graph
Works this paper leans on
-
[1]
Dexterous functional grasping.arXiv preprint arXiv:2312.02975, 2023
Ananye Agarwal, Shagun Uppal, Kenneth Shaw, and Deepak Pathak. Dexterous functional grasping.arXiv preprint arXiv:2312.02975, 2023
-
[2]
OpenAI: Marcin Andrychowicz, Bowen Baker, Maciek Chociej, Rafal Jozefowicz, Bob McGrew, Jakub Pa- chocki, Arthur Petron, Matthias Plappert, Glenn Powell, Alex Ray, et al. Learning dexterous in-hand manipula- tion.The International Journal of Robotics Research, 39 (1):3–20, 2020
work page 2020
-
[3]
La- tent action diffusion for cross-embodiment manipulation
Erik Bauer, Elvis Nava, and Robert K Katzschmann. La- tent action diffusion for cross-embodiment manipulation. arXiv preprint arXiv:2506.14608, 2025
-
[4]
A. Bicchi. Hands for dexterous manipulation and ro- bust grasping: a difficult road toward simplicity.IEEE Transactions on Robotics and Automation, 16(6):652– 662, 2000. doi: 10.1109/70.897777
-
[5]
A system for general in-hand object re-orientation
Tao Chen, Jie Xu, and Pulkit Agrawal. A system for general in-hand object re-orientation. InConference on Robot Learning, pages 297–307. PMLR, 2022
work page 2022
-
[6]
Tao Chen, Megha Tippur, Siyang Wu, Vikash Kumar, Edward Adelson, and Pulkit Agrawal. Visual dexter- ity: In-hand reorientation of novel and complex object shapes.Science Robotics, 8(84):eadc9244, 2023. doi: 10.1126/scirobotics.adc9244. URL https://www.science. org/doi/abs/10.1126/scirobotics.adc9244
- [7]
-
[8]
doi: 10.1109/70.34763
-
[9]
Xin Fei, Zhixuan Xu, Huaicong Fang, Tianrui Zhang, and Lin Shao. T(r, o) grasp: Efficient graph diffusion of robot-object spatial transformation for cross-embodiment dexterous grasping.arXiv preprint arXiv:2510.12724, 2025
-
[10]
Jingxiang Guo, Jiayu Luo, Zhenyu Wei, Yiwen Hou, Zhixuan Xu, Xiaoyi Lin, Chongkai Gao, and Lin Shao. Telepreview: A user-friendly teleoperation system with virtual arm assistance for enhanced effectiveness.arXiv preprint arXiv:2412.13548, 2024
-
[11]
Zihao He, Bo Ai, Tongzhou Mu, Yulin Liu, Weikang Wan, Jiawei Fu, Yilun Du, Henrik I Christensen, and Hao Su. Scaling cross-embodiment world models for dex- terous manipulation.arXiv preprint arXiv:2511.01177, 2025
-
[12]
Dynamic handover: Throw and catch with bi- manual hands.arXiv preprint arXiv:2309.05655, 2023
Binghao Huang, Yuanpei Chen, Tianyu Wang, Yuzhe Qin, Yaodong Yang, Nikolay Atanasov, and Xiaolong Wang. Dynamic handover: Throw and catch with bi- manual hands.arXiv preprint arXiv:2309.05655, 2023
-
[13]
Rl-100: Performant robotic manipulation with real-world reinforcement learning, 2025
Kun Lei, Huanyu Li, Dongjie Yu, Zhenyu Wei, Lingxiao Guo, Zhennan Jiang, Ziyu Wang, Shiyu Liang, and Huazhe Xu. Rl-100: Performant robotic manipulation with real-world reinforcement learning.arXiv preprint arXiv:2510.14830, 2025
-
[14]
Gendexgrasp: Generalizable dexterous grasping.arXiv preprint arXiv:2210.00722, 2022
Puhao Li, Tengyu Liu, Yuyang Li, Yixin Zhu, Yaodong Yang, and Siyuan Huang. Gendexgrasp: Generalizable dexterous grasping.arXiv preprint arXiv:2210.00722, 2022
-
[15]
Dexhanddiff: Interaction-aware diffusion planning for adaptive dexterous manipulation
Zhixuan Liang, Yao Mu, Yixiao Wang, Tianxing Chen, Wenqi Shao, Wei Zhan, Masayoshi Tomizuka, Ping Luo, and Mingyu Ding. Dexhanddiff: Interaction-aware diffusion planning for adaptive dexterous manipulation. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 1745–1755, 2025
work page 2025
-
[16]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
Viktor Makoviychuk, Lukasz Wawrzyniak, Yunrong Guo, Michelle Lu, Kier Storey, Miles Macklin, David Hoeller, Nikita Rudin, Arthur Allshire, Ankur Handa, et al. Isaac gym: High performance gpu-based physics simulation for robot learning.arXiv preprint arXiv:2108.10470, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[17]
Get-zero: Graph em- bodiment transformer for zero-shot embodiment gener- alization
Austin Patel and Shuran Song. Get-zero: Graph em- bodiment transformer for zero-shot embodiment gener- alization. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 14262–14269. IEEE, 2025
work page 2025
-
[18]
Pallets Projects. Jinja documentation. https://jinja. palletsprojects.com/en/stable/, 2022
work page 2022
-
[19]
In-hand object rotation via rapid motor adaptation
Haozhi Qi, Ashish Kumar, Roberto Calandra, Yi Ma, and Jitendra Malik. In-hand object rotation via rapid motor adaptation. InConference on Robot Learning, pages 1722–1732. PMLR, 2023
work page 2023
-
[20]
Learning Complex Dexterous Manipulation with Deep Reinforcement Learning and Demonstrations
Aravind Rajeswaran, Vikash Kumar, Abhishek Gupta, Giulia Vezzani, John Schulman, Emanuel Todorov, and Sergey Levine. Learning complex dexterous manipula- tion with deep reinforcement learning and demonstra- tions.arXiv preprint arXiv:1709.10087, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[21]
Shadow Robot. Dexterous hand series. https:// shadowrobot.com/dexterous-hand-series/
-
[22]
Proximal Policy Optimization Algorithms
John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. Proximal policy optimization algorithms.arXiv preprint arXiv:1707.06347, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[23]
Unigrasp: Learning a unified model to grasp with multifingered robotic hands
Lin Shao, Fabio Ferreira, Mikael Jorda, Varun Nambiar, Jianlan Luo, Eugen Solowjow, Juan Aparicio Ojea, Ous- sama Khatib, and Jeannette Bohg. Unigrasp: Learning a unified model to grasp with multifingered robotic hands. IEEE Robotics and Automation Letters, 5(2):2286–2293, 2020
work page 2020
-
[24]
Kenneth Shaw, Ananye Agarwal, and Deepak Pathak. Leap hand: Low-cost, efficient, and anthropomor- phic hand for robot learning.arXiv preprint arXiv:2309.06440, 2023
-
[25]
Denoising Diffusion Implicit Models
Jiaming Song, Chenlin Meng, and Stefano Ermon. Denoising diffusion implicit models.arXiv preprint arXiv:2010.02502, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[26]
Weikang Wan, Haoran Geng, Yun Liu, Zikang Shan, Yaodong Yang, Li Yi, and He Wang. Unidexgrasp++: Im- proving dexterous grasping policy learning via geometry- aware curriculum and iterative generalist-specialist learn- ing. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 3891–3902, 2023
work page 2023
-
[27]
Cy- berdemo: Augmenting simulated human demonstration for real-world dexterous manipulation
Jun Wang, Yuzhe Qin, Kaiming Kuang, Yigit Korkmaz, Akhilan Gurumoorthy, Hao Su, and Xiaolong Wang. Cy- berdemo: Augmenting simulated human demonstration for real-world dexterous manipulation. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 17952–17963, 2024
work page 2024
-
[28]
Lessons from learning to spin ”pens”, 2024
Jun Wang, Ying Yuan, Haichuan Che, Haozhi Qi, Yi Ma, Jitendra Malik, and Xiaolong Wang. Lessons from learn- ing to spin” pens”.arXiv preprint arXiv:2407.18902, 2024
-
[29]
Dexgraspnet: A large-scale robotic dexterous grasp dataset for general objects based on simulation,
Ruicheng Wang, Jialiang Zhang, Jiayi Chen, Yinzhen Xu, Puhao Li, Tengyu Liu, and He Wang. Dexgrasp- net: A large-scale robotic dexterous grasp dataset for general objects based on simulation.arXiv preprint arXiv:2210.02697, 2022
-
[30]
In: 2025 IEEE International Conference on Robotics and Automation (ICRA), pp
Zhenyu Wei, Zhixuan Xu, Jingxiang Guo, Yiwen Hou, Chongkai Gao, Zhehao Cai, Jiayu Luo, and Lin Shao. D(R,O)grasp: A unified representation of robot and object interaction for cross-embodiment dexterous grasp- ing. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 4982–4988, 2025. doi: 10.1109/ICRA55743.2025.11127754
-
[31]
Zhiyuan Wu, Rolandos Alexandros Potamias, Xuyang Zhang, Zhongqun Zhang, Jiankang Deng, and Shan Luo. Cedex: Cross-embodiment dexterous grasp generation at scale from human-like contact representations.arXiv preprint arXiv:2509.24661, 2025
-
[32]
Lixin Xu, Zixuan Liu, Zhewei Gui, Jingxiang Guo, Zeyu Jiang, Zhixuan Xu, Chongkai Gao, and Lin Shao. Dexs- ingrasp: Learning a unified policy for dexterous object singulation and grasping in cluttered environments.arXiv preprint arXiv:2504.04516, 2025
-
[33]
Mengda Xu, Han Zhang, Yifan Hou, Zhenjia Xu, Linxi Fan, Manuela Veloso, and Shuran Song. Dexumi: Using human hand as the universal manipulation in- terface for dexterous manipulation.arXiv preprint arXiv:2505.21864, 2025
-
[34]
Yinzhen Xu, Weikang Wan, Jialiang Zhang, Haoran Liu, Zikang Shan, Hao Shen, Ruicheng Wang, Haoran Geng, Yijia Weng, Jiayi Chen, et al. Unidexgrasp: Universal robotic dexterous grasping via learning diverse proposal generation and goal-conditioned policy. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 4737–4746, 2023
work page 2023
-
[35]
Zhixuan Xu, Chongkai Gao, Zixuan Liu, Gang Yang, Chenrui Tie, Haozhuo Zheng, Haoyu Zhou, Weikun Peng, Debang Wang, Tianrun Hu, et al. Manifounda- tion model for general-purpose robotic manipulation of contact synthesis with arbitrary objects and robots. In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 10905–10912. ...
work page 2024
-
[36]
Viser: Imperative, web-based 3d visualization in python.arXiv preprint arXiv:2507.22885, 2025
Brent Yi, Chung Min Kim, Justin Kerr, Gina Wu, Re- becca Feng, Anthony Zhang, Jonas Kulhanek, Hongsuk Choi, Yi Ma, Matthew Tancik, et al. Viser: Imperative, web-based 3d visualization in python.arXiv preprint arXiv:2507.22885, 2025
-
[37]
Zhao-Heng Yin and Pieter Abbeel. Lightning grasp: High performance procedural grasp synthesis with contact fields.arXiv preprint arXiv:2511.07418, 2025
-
[38]
Zhao-Heng Yin, Binghao Huang, Yuzhe Qin, Qifeng Chen, and Xiaolong Wang. Rotating without seeing: Towards in-hand dexterity through touch.arXiv preprint arXiv:2303.10880, 2023
-
[39]
Robot synesthesia: In-hand ma- nipulation with visuotactile sensing
Ying Yuan, Haichuan Che, Yuzhe Qin, Binghao Huang, Zhao-Heng Yin, Kang-Won Lee, Yi Wu, Soo-Chul Lim, and Xiaolong Wang. Robot synesthesia: In-hand ma- nipulation with visuotactile sensing. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 6558–6565. IEEE, 2024
work page 2024
-
[40]
Zhecheng Yuan, Tianming Wei, Shuiqi Cheng, Gu Zhang, Yuanpei Chen, and Huazhe Xu. Learning to manipulate anywhere: A visual generalizable framework for reinforcement learning.arXiv preprint arXiv:2407.15815, 2024
-
[41]
3D Diffusion Policy: Generalizable Visuomotor Policy Learning via Simple 3D Representations
Yanjie Ze, Gu Zhang, Kangning Zhang, Chenyuan Hu, Muhan Wang, and Huazhe Xu. 3d diffusion policy: Generalizable visuomotor policy learning via simple 3d representations.arXiv preprint arXiv:2403.03954, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[42]
Dexgraspnet 2.0: Learning generative dexterous grasping in large-scale synthetic cluttered scenes
Jialiang Zhang, Haoran Liu, Danshi Li, XinQiang Yu, Haoran Geng, Yufei Ding, Jiayi Chen, and He Wang. Dexgraspnet 2.0: Learning generative dexterous grasping in large-scale synthetic cluttered scenes. In8th Annual Conference on Robot Learning, 2024
work page 2024
-
[43]
Catch it! learning to catch in flight with mobile dexterous hands
Yuanhang Zhang, Tianhai Liang, Zhenyang Chen, Yanjie Ze, and Huazhe Xu. Catch it! learning to catch in flight with mobile dexterous hands. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 14385–14391. IEEE, 2025
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.