Recognition: 2 theorem links
· Lean TheoremFASTER: Rethinking Real-Time Flow VLAs
Pith reviewed 2026-05-15 07:59 UTC · model grok-4.3
The pith
A Horizon-Aware Schedule lets flow-based VLAs complete the first action's denoising in one step instead of many while keeping the full trajectory intact.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
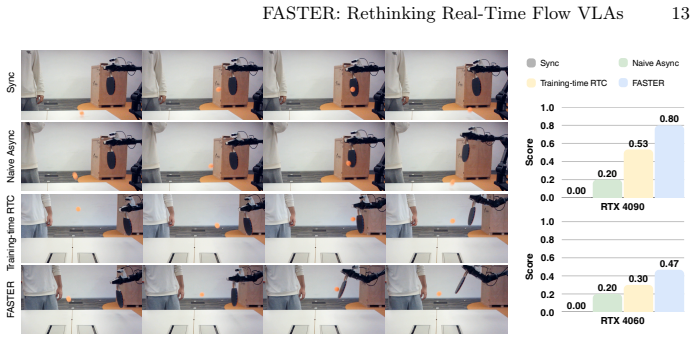
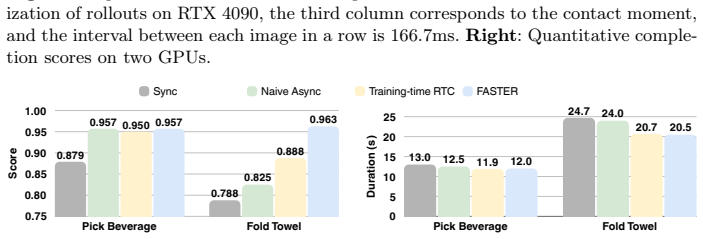
FASTER replaces the fixed denoising schedule of flow-based VLAs with a Horizon-Aware Schedule that adaptively prioritizes near-term actions. The immediate reaction is thereby compressed from roughly ten sampling steps into one step, while the remaining steps continue to refine the longer-horizon portion of the trajectory. Real-robot trials, including a high-speed table-tennis task, demonstrate that the resulting trajectories remain accurate and smooth under streaming execution.
What carries the argument
Horizon-Aware Schedule: an adaptive reordering of flow-matching denoising steps that allocates the first sampling iteration almost entirely to the nearest action chunk.
If this is right
- Reaction latency drops by roughly an order of magnitude because the first action can be executed after one denoising step.
- The streaming pipeline allows the robot to begin moving while later denoising steps continue in the background.
- Consumer-grade GPUs become viable for closed-loop control because the per-step compute budget is reduced.
- Dynamic tasks such as table tennis become feasible for generalist VLAs without task-specific fine-tuning.
- Trajectory smoothness is retained because the remaining sampling budget is still applied to the full horizon.
Where Pith is reading between the lines
- The same priority logic could be applied to other iterative sampling policies such as diffusion or consistency models to obtain similar latency gains.
- If the schedule is made state-dependent rather than purely horizon-dependent, the method might adapt to sudden environmental changes even faster.
- Extending the approach to multi-robot coordination would require synchronizing the horizon-aware priorities across agents.
- Longer test horizons than those used in the paper could reveal whether quality degradation appears only after several seconds of execution.
Load-bearing premise
Prioritizing near-term denoising steps will not introduce visible artifacts or instability in the longer part of the trajectory when the policy runs under real-world dynamics.
What would settle it
A controlled robot experiment that runs the same policy for many successive long-horizon executions and records a statistically significant increase in tracking error or oscillation after the first action would falsify the claim that long-horizon quality is preserved.
Figures









read the original abstract
Real-time execution is crucial for deploying Vision-Language-Action (VLA) models in the physical world. Existing asynchronous inference methods primarily optimize trajectory smoothness, but neglect the critical latency in reacting to environmental changes. By rethinking the notion of reaction in action chunking policies, this paper presents a systematic analysis of the factors governing reaction time. We show that reaction time follows a uniform distribution determined jointly by the Time to First Action (TTFA) and the execution horizon. Moreover, we reveal that the standard practice of applying a constant schedule in flow-based VLAs can be inefficient and forces the system to complete all sampling steps before any movement can start, forming the bottleneck in reaction latency. To overcome this issue, we propose Fast Action Sampling for ImmediaTE Reaction (FASTER). By introducing a Horizon-Aware Schedule, FASTER adaptively prioritizes near-term actions during flow sampling, compressing the denoising of the immediate reaction by tenfold (e.g., in $\pi_{0.5}$ and X-VLA) into a single step, while preserving the quality of long-horizon trajectory. Coupled with a streaming client-server pipeline, FASTER substantially reduces the effective reaction latency on real robots, especially when deployed on consumer-grade GPUs. Real-world experiments, including a highly dynamic table tennis task, prove that FASTER unlocks unprecedented real-time responsiveness for generalist policies, enabling rapid generation of accurate and smooth trajectories.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that reaction time in action-chunking VLAs follows a uniform distribution set by TTFA and execution horizon, that constant flow schedules create an unnecessary bottleneck by requiring full denoising before any motion, and that a Horizon-Aware Schedule in FASTER adaptively prioritizes near-term denoising steps, reducing TTFA by roughly 10× (e.g., in π₀.₅ and X-VLA) into a single step while leaving long-horizon trajectory quality statistically intact. The method is paired with a streaming client-server pipeline and validated on real-robot tasks including dynamic table tennis.
Significance. If the separability assumption holds, the work supplies a practical route to sub-100 ms reaction latency for generalist flow VLAs on consumer GPUs without retraining, directly addressing a deployment barrier that current asynchronous methods have left unaddressed. The uniform-distribution framing of reaction time is a clean conceptual contribution that could be reused beyond flow models.
major comments (2)
- [§4] §4 (Horizon-Aware Schedule): the central claim that single-step near-term prioritization leaves the remaining flow trajectory statistically equivalent to full sampling rests on an unproven separability assumption for the learned vector field; no derivation shows that early truncation of the immediate-action component does not propagate inconsistency into later actions under non-uniform action distributions or real dynamics.
- [§5] §5 (Real-robot experiments): the reported 10× TTFA compression and quality preservation are load-bearing for the contribution, yet the manuscript provides insufficient detail on statistical controls, per-trajectory variance, baseline schedule tuning procedures, and whether post-hoc hyper-parameter search was performed; without these the empirical support remains inconclusive.
minor comments (2)
- [§4.1] Notation for the Horizon-Aware Schedule weights should be introduced with an explicit equation rather than prose description only.
- [§3] The uniform-distribution analysis of reaction time would benefit from a short appendix deriving the exact bounds on TTFA and horizon rather than stating the result.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and have prepared revisions to strengthen the manuscript where the points are valid.
read point-by-point responses
-
Referee: [§4] §4 (Horizon-Aware Schedule): the central claim that single-step near-term prioritization leaves the remaining flow trajectory statistically equivalent to full sampling rests on an unproven separability assumption for the learned vector field; no derivation shows that early truncation of the immediate-action component does not propagate inconsistency into later actions under non-uniform action distributions or real dynamics.
Authors: We acknowledge that the manuscript does not contain a formal derivation of the separability assumption. The Horizon-Aware Schedule is motivated by the structure of flow matching, where the learned vector field primarily corrects high-frequency noise in early denoising steps that correspond to immediate actions. We provide empirical support through real-robot experiments and ablations showing that long-horizon metrics (success rate, smoothness, collision rate) remain statistically equivalent. In revision we will explicitly label the assumption, add a short derivation sketch based on the flow ODE formulation, and include controlled ablations on synthetic non-uniform action distributions to quantify any propagation effects. revision: yes
-
Referee: [§5] §5 (Real-robot experiments): the reported 10× TTFA compression and quality preservation are load-bearing for the contribution, yet the manuscript provides insufficient detail on statistical controls, per-trajectory variance, baseline schedule tuning procedures, and whether post-hoc hyper-parameter search was performed; without these the empirical support remains inconclusive.
Authors: We agree that the experimental section would benefit from greater transparency. The revised manuscript will expand §5 and the appendix to report: number of trials and confidence intervals for each task; per-trajectory variance for TTFA and trajectory error; the exact grid-search procedure used to tune baseline schedules (with the search space listed); and an explicit statement that no post-hoc hyper-parameter search was performed after the initial experimental design. These additions will make the empirical claims more conclusive. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper presents the Horizon-Aware Schedule as a proposed engineering method to adaptively prioritize near-term denoising steps in flow-based VLAs, with the claimed 10x TTFA compression described as an empirical outcome rather than a mathematical identity. The reaction-time uniform distribution is introduced as an analysis of existing factors (TTFA and execution horizon), not derived from or fitted to the new schedule itself. No equations reduce the latency improvement to a parameter defined by the same data, no self-citations are load-bearing for the core claim, and no ansatz or uniqueness theorem is smuggled in to force the result by construction. The derivation remains self-contained as an applied innovation supported by real-robot experiments.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
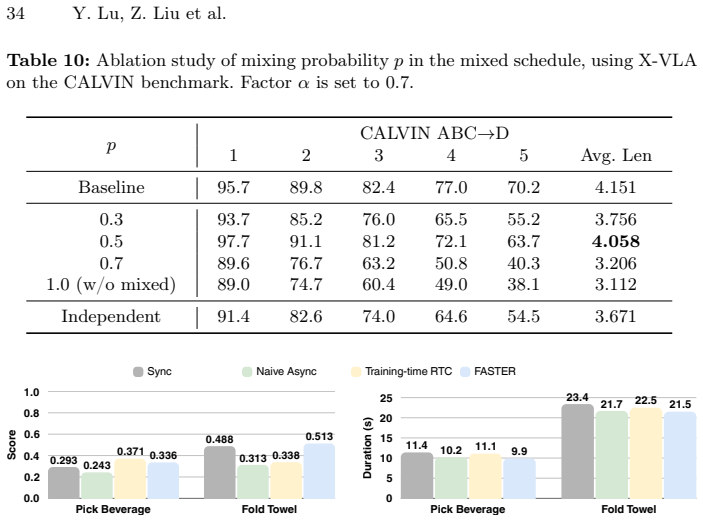
Horizon-Aware Schedule ... ui = (1−(i/(H−1))α)∗u0 ... τji = max(0,(ρj−ui)/(1−ui))
-
IndisputableMonolith/Foundation/DimensionForcing.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
straightness S(A) ... pilot study on action chunk sampling
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 3 Pith papers
-
DiscreteRTC: Discrete Diffusion Policies are Natural Asynchronous Executors
Discrete diffusion policies support native asynchronous execution via unmasking for real-time chunking, delivering higher success rates and 0.7x inference cost versus flow-matching RTC on dynamic robotics benchmarks a...
-
LiteVLA-H: Dual-Rate Vision-Language-Action Inference for Onboard Aerial Guidance and Semantic Perception
LiteVLA-H delivers 19.74 Hz action tokens and 6 Hz semantic outputs on Jetson Orin via dual-rate scheduling and mixed fine-tuning, outperforming recent VLA baselines in edge action rate while preserving descriptive co...
-
LiteVLA-H: Dual-Rate Vision-Language-Action Inference for Onboard Aerial Guidance and Semantic Perception
LiteVLA-H delivers 50 ms reactive action tokens and 150-165 ms semantic outputs on Jetson AGX Orin by separating fast guidance from slower scene understanding in a compact VLA fine-tuned on mixed aerial and generic data.
Reference graph
Works this paper leans on
-
[1]
Bai, J., Bai, S., Chu, Y., Cui, Z., Dang, K., Deng, X., Fan, Y., Ge, W., Han, Y., Huang, F., et al.: Qwen technical report. arXiv preprint arXiv:2309.16609 (2023)
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[2]
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
Bjorck, J., Castañeda, F., Cherniadev, N., Da, X., Ding, R., Fan, L., Fang, Y., Fox, D., Hu, F., Huang, S., et al.: GR00T N1: an open foundation model for generalist humanoid robots. arXiv preprint arXiv:2503.14734 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[3]
Black, K., Brown, N., Driess, D., Esmail, A., Equi, M., Finn, C., Fusai, N., Groom, L., Hausman, K., Ichter, B., et al.:π0: A vision-language-action flow model for general robot control. In: RSS (2025)
work page 2025
-
[4]
Black, K., Galliker, M.Y., Levine, S.: Real-time execution of action chunking flow policies. In: NeurIPS (2025)
work page 2025
-
[5]
arXiv preprint arXiv:2512.05964 (2025)
Black, K., Ren, A.Z., Equi, M., Levine, S.: Training-time action conditioning for efficient real-time chunking. arXiv preprint arXiv:2512.05964 (2025)
-
[6]
Bu, Q., Cai, J., Chen, L., Cui, X., Ding, Y., Feng, S., He, X., Huang, X., et al.: Agibot world colosseo: A large-scale manipulation platform for scalable and in- telligent embodied systems. In: IROS (2025)
work page 2025
-
[7]
arXiv preprint arXiv:2507.14049 (2025)
Budzianowski, P., Maa, W., Freed, M., Mo, J., Hsiao, W., Xie, A., Młoduchowski, T., Tipnis, V., Bolte, B.: Edgevla: Efficient vision-language-action models. arXiv preprint arXiv:2507.14049 (2025)
-
[8]
Cadene, R., Alibert, S., Capuano, F., Aractingi, M., Zouitine, A., Kooijmans, P., Choghari, J., Russi, M., Pascal, C., Palma, S., Shukor, M., Moss, J., Soare, A., Aubakirova, D., Lhoest, Q., Gallouédec, Q., Wolf, T.: Lerobot: An open-source library for end-to-end robot learning. In: ICLR (2026)
work page 2026
-
[9]
arXiv preprint arXiv:2602.12684 (2026)
Cai, R., Guo, J., He, X., Jin, P., Li, J., Lin, B., Liu, F., Liu, W., Ma, F., Ma, K., et al.: Xiaomi-robotics-0: An open-sourced vision-language-action model with real-time execution. arXiv preprint arXiv:2602.12684 (2026)
-
[10]
Chen, B., Monsó, D.M., Du, Y., Simchowitz, M., Tedrake, R., Sitzmann, V.: Diffusionforcing:Next-tokenpredictionmeetsfull-sequencediffusion.In:NeurIPS (2024)
work page 2024
-
[11]
Chen, H., Liu, M., Ma, C., Ma, X., Ma, Z., Wu, H., Chen, Y., Zhong, Y., Wang, M., Li, Q., Yang, Y.: Falcon: Fast visuomotor policies via partial denoising. In: ICML (2025) 16 Y. Lu, Z. Liu et al
work page 2025
-
[12]
arXiv preprint arXiv:2510.25122 (2025)
Chen, J., Wang, J., Chen, L., Cai, C., Lu, J.: Nanovla: Routing decoupled vision- language understanding for nano-sized generalist robotic policies. arXiv preprint arXiv:2510.25122 (2025)
-
[13]
arXiv preprint arXiv:2506.17639 (2025)
Chen, Y., Li, X.: Rlrc: Reinforcement learning-based recovery for compressed vision-language-action models. arXiv preprint arXiv:2506.17639 (2025)
-
[14]
Chen, Z., Yuan, X., Mu, T., Su, H.: Responsive noise-relaying diffusion policy: Responsive and efficient visuomotor control. TMLR (2025)
work page 2025
-
[15]
Chi, C., Feng, S., Du, Y., Xu, Z., Cousineau, E., Burchfiel, B., Song, S.: Diffusion Policy: Visuomotor policy learning via action diffusion. In: RSS (2023)
work page 2023
-
[16]
arXiv preprint arXiv:2512.20276 (2025)
Dai, Y., Gu, H., Wang, T., Cheng, Q., Zheng, Y., Qiu, Z., Gong, L., Lou, W., Zhou, X.: Actionflow: A pipelined action acceleration for vision language models on edge. arXiv preprint arXiv:2512.20276 (2025)
-
[17]
IEEE Transactions on robotics (2025)
Ding, H., Jaquier, N., Peters, J., Rozo, L.: Fast and robust visuomotor riemannian flow matching policy. IEEE Transactions on robotics (2025)
work page 2025
- [18]
-
[19]
Any3D-VLA: Enhancing VLA Robustness via Diverse Point Clouds
Fan, X., Deng, S., Wu, X., Lu, Y., Li, Z., Yan, M., Zhang, Y., Zhang, Z., Wang, H., Zhao, H.: Any3d-vla: Enhancing vla robustness via diverse point clouds. arXiv preprint arXiv:2602.00807 (2026)
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[20]
arXiv preprint arXiv:2509.09090 (2025)
Fang, H., Liu, Y., Du, Y., Du, L., Yang, H.: Sqap-vla: A synergistic quantization- aware pruning framework for high-performance vision-language-action models. arXiv preprint arXiv:2509.09090 (2025)
-
[21]
Frans, K., Hafner, D., Levine, S., Abbeel, P.: One step diffusion via shortcut models. In: ICLR (2025)
work page 2025
-
[22]
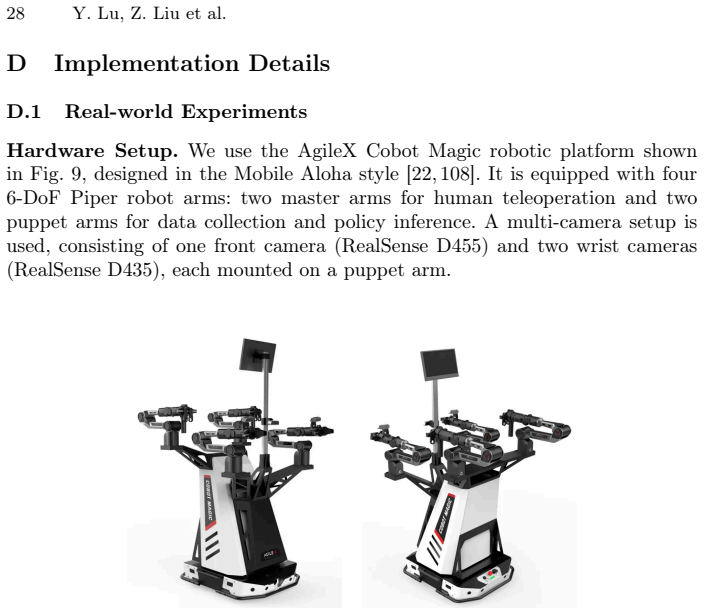
Fu, Z., Zhao, T.Z., Finn, C.: Mobile ALOHA: Learning bimanual mobile manip- ulation using low-cost whole-body teleoperation. In: CoRL (2024)
work page 2024
-
[23]
arXiv preprint arXiv:2511.18950 (2025)
Gao, J., Ye, F., Zhang, J., Qian, W.: Compressor-vla: Instruction-guided visual token compression for efficient robotic manipulation. arXiv preprint arXiv:2511.18950 (2025)
-
[24]
Geng, Z., Deng, M., Bai, X., Kolter, J.Z., He, K.: Mean flows for one-step gener- ative modeling. In: NeurIPS (2025)
work page 2025
-
[25]
arXiv preprint arXiv:2510.17111 (2025)
Guan, W., Hu, Q., Li, A., Cheng, J.: Efficient vision-language-action models for embodied manipulation: A systematic survey. arXiv preprint arXiv:2510.17111 (2025)
-
[26]
MiMo-Embodied: X-Embodied Foundation Model Technical Report
Hao, X., Zhou, L., Huang, Z., Hou, Z., Tang, Y., Zhang, L., Li, G., Lu, Z., Ren, S., Meng, X., et al.: Mimo-embodied: X-embodied foundation model technical report. arXiv preprint arXiv:2511.16518 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[27]
Ho, J., Jain, A., Abbeel, P.: Denoising diffusion probabilistic models. In: NeurIPS (2020)
work page 2020
-
[28]
arXiv preprint arXiv:2406.04806 (2024)
Høeg, S.H., Du, Y., Egeland, O.: Streaming diffusion policy: Fast policy synthesis with variable noise diffusion models. arXiv preprint arXiv:2406.04806 (2024)
-
[29]
Holmes, C., Tanaka, M., Wyatt, M., Awan, A.A., Rasley, J., Rajbhandari, S., Aminabadi, R.Y., Qin, H., Bakhtiari, A., Kurilenko, L., et al.: Deepspeed-fastgen: High-throughput text generation for llms via mii and deepspeed-inference. arXiv preprint arXiv:2401.08671 (2024)
-
[30]
arXiv preprint arXiv:2602.00780 (2026) FASTER: Rethinking Real-Time Flow VLAs 17
Huang, Y., Ding, L., Tang, Z., Zhu, Z., Deng, J., Lin, X., Liu, S., Ren, H., Ji, J., Zhang, Y.: Environment-aware adaptive pruning with interleaved inference orchestration for vision-language-action models. arXiv preprint arXiv:2602.00780 (2026) FASTER: Rethinking Real-Time Flow VLAs 17
-
[31]
$\pi^{*}_{0.6}$: a VLA That Learns From Experience
Intelligence, P., Amin, A., Aniceto, R., Balakrishna, A., Black, K., Conley, K., Connors, G., Darpinian, J., Dhabalia, K., DiCarlo, J., et al.:π∗ 0.6: a vla that learns from experience. arXiv preprint arXiv:2511.14759 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[32]
$\pi_{0.5}$: a Vision-Language-Action Model with Open-World Generalization
Intelligence, P., Black, K., Brown, N., Darpinian, J., Dhabalia, K., Driess, D., Esmail, A., Equi, M., Finn, C., Fusai, N., et al.:π0.5: a vision-language-action model with open-world generalization. arXiv preprint arXiv:2504.16054 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[33]
arXiv preprint arXiv:2510.08464 (2025)
Jabbour, J., Kim, D.K., Smith, M., Patrikar, J., Ghosal, R., Wang, Y., Agha, A., Reddi, V.J., Omidshafiei, S.: Don’t run with scissors: Pruning breaks vla models but they can be recovered. arXiv preprint arXiv:2510.08464 (2025)
-
[34]
arXiv preprint arXiv:2601.20262 (2026)
Jeon, B., Choi, Y., Kim, T.: Shallow-π: Knowledge distillation for flow-based vlas. arXiv preprint arXiv:2601.20262 (2026)
-
[35]
arXiv preprint arXiv:2412.09265 (2024)
Jia, B., Ding, P., Cui, C., Sun, M., Qian, P., Huang, S., Fan, Z., Wang, D.: Score and distribution matching policy: Advanced accelerated visuomotor policies via matched distillation. arXiv preprint arXiv:2412.09265 (2024)
-
[36]
arXiv preprint arXiv:2509.12594 (2025)
Jiang, T., Jiang, X., Ma, Y., Wen, X., Li, B., Zhan, K., Jia, P., Liu, Y., Sun, S., Lang, X.: The better you learn, the smarter you prune: Towards efficient vision-language-action models via differentiable token pruning. arXiv preprint arXiv:2509.12594 (2025)
-
[37]
Khazatsky, A., Pertsch, K., Nair, S., Balakrishna, A., Dasari, S., Karamcheti, S., Nasiriany, S., Srirama, M.K., Chen, L.Y., Ellis, K., et al.: DROID: A large-scale in-the-wild robot manipulation dataset. In: RSS (2024)
work page 2024
-
[38]
Kim, M.J., Finn, C., Liang, P.: Fine-tuning vision-language-action models: Opti- mizing speed and success. In: RSS (2025)
work page 2025
-
[39]
Kim, M.J., Pertsch, K., Karamcheti, S., Xiao, T., Balakrishna, A., Nair, S., Rafailov, R., Foster, E., Lam, G., Sanketi, P., et al.: OpenVLA: An open-source vision-language-action model. In: CoRL (2024)
work page 2024
-
[40]
LLaVA-OneVision: Easy Visual Task Transfer
Li, B., Zhang, Y., Guo, D., Zhang, R., Li, F., Zhang, H., Zhang, K., Zhang, P., Li, Y., Liu, Z., et al.: Llava-onevision: Easy visual task transfer. arXiv preprint arXiv:2408.03326 (2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[41]
arXiv preprint arXiv:2511.10518 (2025)
Li, W., Zhang, R., Shao, R., Fang, Z., Zhou, K., Tian, Z., Nie, L.: Semanticvla: Semantic-aligned sparsification and enhancement for efficient robotic manipula- tion. arXiv preprint arXiv:2511.10518 (2025)
-
[42]
arXiv preprint arXiv:2506.12723 (2025)
Li, Y., Meng, Y., Sun, Z., Ji, K., Tang, C., Fan, J., Ma, X., Xia, S., Wang, Z., Zhu, W.: Sp-vla: A joint model scheduling and token pruning approach for vla model acceleration. arXiv preprint arXiv:2506.12723 (2025)
-
[43]
arXiv preprint arXiv:2508.14042 (2025)
Li, Z., Wu, X., Xu, Z., Zhao, H.: Train once, deploy anywhere: Realize data- efficient dynamic object manipulation. arXiv preprint arXiv:2508.14042 (2025)
-
[44]
arXiv preprint arXiv:2512.07697 (2025)
Liao, A., Kim, D.K., Smith, M.O., Agha-mohammadi, A.a., Omidshafiei, S.: Delay-aware diffusion policy: Bridging the observation-execution gap in dynamic tasks. arXiv preprint arXiv:2512.07697 (2025)
-
[45]
arXiv preprint arXiv:2511.04555 (2025)
Lin, T., Zhong, Y., Du, Y., Zhang, J., Liu, J., Chen, Y., Gu, E., Liu, Z., Cai, H., Zou, Y., et al.: Evo-1: Lightweight vision-language-action model with preserved semantic alignment. arXiv preprint arXiv:2511.04555 (2025)
-
[46]
Lipman, Y., Chen, R.T.Q., Ben-Hamu, H., Nickel, M., Le, M.: Flow matching for generative modeling. In: ICLR (2023)
work page 2023
-
[47]
Lipman, Y., Havasi, M., Holderrieth, P., Shaul, N., Le, M., Karrer, B., Chen, R.T., Lopez-Paz, D., Ben-Hamu, H., Gat, I.: Flow matching guide and code. arXiv preprint arXiv:2412.06264 (2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[48]
Liu,B.,Zhu,Y.,Gao,C.,Feng,Y.,Liu,Q.,Zhu,Y.,Stone,P.:Libero:Benchmark- ing knowledge transfer for lifelong robot learning. In: NeurIPS. pp. 44776–44791 (2023) 18 Y. Lu, Z. Liu et al
work page 2023
-
[49]
Liu, J., Liu, M., Wang, Z., An, P., Li, X., Zhou, K., Yang, S., Zhang, R., Guo, Y., Zhang, S.: Robomamba: Efficient vision-language-action model for robotic reasoning and manipulation. In: NeurIPS. pp. 40085–40110 (2024)
work page 2024
-
[50]
arXiv preprint arXiv:2602.03310 (2026)
Liu, S., Li, B., Ma, K., Wu, L., Tan, H., Ouyang, X., Su, H., Zhu, J.: RDT2: Exploring the scaling limit of umi data towards zero-shot cross-embodiment gen- eralization. arXiv preprint arXiv:2602.03310 (2026)
-
[51]
Liu, X., Gong, C., qiang liu: Flow straight and fast: Learning to generate and transfer data with rectified flow. In: ICLR (2023)
work page 2023
-
[52]
Liu, Y., Hamid, J.I., Xie, A., Lee, Y., Du, M., Finn, C.: Bidirectional decoding: Improving action chunking via guided test-time sampling. In: ICLR (2025)
work page 2025
-
[53]
arXiv preprint arXiv:2602.12978 (2026)
Liu, Y., Yu, H., Zhao, J., Li, B., Zhang, D., Li, M., Wu, W., Hu, Y., Xie, J., Guo, J., et al.: Learning native continuation for action chunking flow policies. arXiv preprint arXiv:2602.12978 (2026)
-
[54]
Liu, Z., Huang, R., Yang, R., Yan, S., Wang, Z., Hou, L., Lin, D., Bai, X., Zhao, H.: Drivepi: Spatial-aware 4d mllm for unified autonomous driving understanding, perception, prediction and planning. In: CVPR (2026)
work page 2026
-
[55]
arXiv preprint arXiv:2511.16449 (2025)
Liu, Z., Chen, Y., Cai, H., Lin, T., Yang, S., Liu, Z., Zhao, B.: Vla-pruner: Temporal-aware dual-level visual token pruning for efficient vision-language- action inference. arXiv preprint arXiv:2511.16449 (2025)
-
[56]
arXiv preprint arXiv:2406.01586 (2024)
Lu, G., Gao, Z., Chen, T., Dai, W., Wang, Z., Ding, W., Tang, Y.: Manicm: Real- time 3d diffusion policy via consistency model for robotic manipulation. arXiv preprint arXiv:2406.01586 (2024)
-
[57]
arXiv preprint arXiv:2512.11769 (2025)
Ma,X.,Yuan,Z.,Zhang,Z.,Shi,K.,Sun,L.,Ye,Y.:Blurr:Aboostedlow-resource inference for vision-language-action models. arXiv preprint arXiv:2512.11769 (2025)
-
[58]
A Survey on Vision-Language-Action Models for Embodied AI
Ma, Y., Song, Z., Zhuang, Y., Hao, J., King, I.: A survey on vision-language-action models for embodied ai. arXiv preprint arXiv:2405.14093 (2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[59]
arXiv preprint arXiv:2510.26742 (2025)
Ma, Y., Zhou, Y., Yang, Y., Wang, T., Fan, H.: Running vlas at real-time speed. arXiv preprint arXiv:2510.26742 (2025)
-
[60]
Matthews, M., Beukman, M., Lu, C., Foerster, J.N.: Kinetix: Investigating the training of general agents through open-ended physics-based control tasks. In: ICLR (2025)
work page 2025
-
[61]
Mees, O., Hermann, L., Rosete-Beas, E., Burgard, W.: CALVIN: A benchmark for language-conditioned policy learning for long-horizon robot manipulation tasks. RAL (2022)
work page 2022
-
[62]
arXiv preprint arXiv:2512.00903 (2025)
Ni, C., Chen, C., Wang, X., Zhu, Z., Zheng, W., Wang, B., Chen, T., Zhao, G., Li, H., Dong, Z., et al.: Swiftvla: Unlocking spatiotemporal dynamics for lightweight vla models at minimal overhead. arXiv preprint arXiv:2512.00903 (2025)
-
[63]
Padalkar, A., Pooley, A., Jain, A., Bewley, A., Herzog, A., Irpan, A., Khazatsky, A., Rai, A., Singh, A., Brohan, A., et al.: Open X-Embodiment: Robotic learning datasets and RT-X models. In: ICRA (2024)
work page 2024
-
[64]
arXiv preprint arXiv:2412.01034 (2024)
Park, S., Kim, H., Jeon, W., Yang, J., Jeon, B., Oh, Y., Choi, J.: Quantization- aware imitation-learning for resource-efficient robotic control. arXiv preprint arXiv:2412.01034 (2024)
- [65]
-
[66]
In: ICLR (2026) FASTER: Rethinking Real-Time Flow VLAs 19
Pei, X., Chen, Y., Xu, S., Wang, Y., Shi, Y., Xu, C.: Action-aware dynamic pruning for efficient vision-language-action manipulation. In: ICLR (2026) FASTER: Rethinking Real-Time Flow VLAs 19
work page 2026
-
[67]
FAST: Efficient Action Tokenization for Vision-Language-Action Models
Pertsch, K., Stachowicz, K., Ichter, B., Driess, D., Nair, S., Vuong, Q., Mees, O., Finn, C., Levine, S.: Fast: Efficient action tokenization for vision-language-action models. arXiv preprint arXiv:2501.09747 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[68]
Reuss, M., Zhou, H., Rühle, M., Yağmurlu, Ö.E., Otto, F., Lioutikov, R.: Flower: Democratizing generalist robot policies with efficient vision-language-action flow policies. In: CoRL (2025)
work page 2025
-
[69]
arXiv preprint arXiv:2505.04769 (2025)
Sapkota, R., Cao, Y., Roumeliotis, K.I., Karkee, M.: Vision-language-action (vla) models: Concepts, progress, applications and challenges. arXiv preprint arXiv:2505.04769 (2025)
-
[70]
arXiv preprint arXiv:2508.13073 (2025)
Shao, R., Li, W., Zhang, L., Zhang, R., Liu, Z., Chen, R., Nie, L.: Large vlm-based vision-language-action models for robotic manipulation: A survey. arXiv preprint arXiv:2508.13073 (2025)
-
[71]
Sheng, J., Wang, Z., Li, P., Liu, M.: Mp1: Meanflow tames policy learning in 1-step for robotic manipulation. In: AAAI (2026)
work page 2026
- [72]
-
[73]
SmolVLA: A Vision-Language-Action Model for Affordable and Efficient Robotics
Shukor, M., Aubakirova, D., Capuano, F., Kooijmans, P., Palma, S., Zoui- tine, A., Aractingi, M., Pascal, C., Russi, M., Marafioti, A., et al.: Smolvla: A vision-language-action model for affordable and efficient robotics. arXiv preprint arXiv:2506.01844 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[74]
Sochopoulos, A., Malkin, N., Tsagkas, N., Moura, J., Gienger, M., Vijayakumar, S.: Fast flow-based visuomotor policies via conditional optimal transport cou- plings. In: CoRL (2025)
work page 2025
-
[75]
Song, J., Meng, C., Ermon, S.: Denoising diffusion implicit models. In: ICLR (2021)
work page 2021
-
[76]
arXiv preprint arXiv:2506.13725 (2025)
Song, W., Chen, J., Ding, P., Huang, Y., Zhao, H., Wang, D., Li, H.: Ceed- vla: Consistency vision-language-action model with early-exit decoding. arXiv preprint arXiv:2506.13725 (2025)
-
[77]
Song, W., Chen, J., Ding, P., Zhao, H., Zhao, W., Zhong, Z., Ge, Z., Ma, J., Li, H.: Accelerating vision-language-action model integrated with action chunking via parallel decoding. In: IROS (2025)
work page 2025
- [78]
-
[79]
arXiv preprint arXiv:2509.11480 (2025)
Taherin, A., Lin, J., Akbari, A., Akbari, A., Zhao, P., Chen, W., Kaeli, D., Wang, Y.: Cross-platform scaling of vision-language-action models from edge to cloud gpus. arXiv preprint arXiv:2509.11480 (2025)
-
[80]
arXiv preprint arXiv:2512.01031 (2025)
Tang, J., Sun, Y., Zhao, Y., Yang, S., Lin, Y., Zhang, Z., Hou, J., Lu, Y., Liu, Z., Han, S.: Vlash: Real-time vlas via future-state-aware asynchronous inference. arXiv preprint arXiv:2512.01031 (2025)
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.