Recognition: no theorem link
SwarmCoDe: A Scalable Co-Design Framework for Heterogeneous Robot Swarms via Dynamic Speciation
Pith reviewed 2026-05-14 23:05 UTC · model grok-4.3
The pith
SwarmCoDe uses dynamic speciation in co-evolution to design specialized robot swarms up to 200 agents without predefined species.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
SwarmCoDe is a Collaborative Co-Evolutionary Algorithm that utilizes dynamic speciation to automatically scale swarm heterogeneity to match task complexity. Inspired by biological signaling mechanisms, the algorithm uses evolved genetic tags and a selectivity gene to facilitate the emergent identification of symbiotically beneficial partners without predefined species boundaries. An evolved dominance gene dictates the relative swarm composition, decoupling the physical swarm size from the evolutionary population. When applied to simultaneously optimize task planning and hardware morphology under fabrication budgets, it successfully evolves specialized swarms of up to 200 agents.
What carries the argument
Dynamic speciation mechanism using evolved genetic tags, a selectivity gene for emergent partner identification, and a dominance gene that sets swarm composition independently of evolutionary population size.
If this is right
- Joint optimization of task planning and hardware morphology becomes feasible for swarms much larger than the evolutionary population.
- Swarm heterogeneity scales automatically to task demands without manual species definitions.
- Fabrication budgets can be enforced while still producing specialized agent types.
- Emergent symbiotic cooperation among robot types supports complex collaborative tasks.
Where Pith is reading between the lines
- The framework could reduce reliance on centralized swarm design by letting composition arise from optimization.
- Similar speciation mechanisms might apply to other multi-agent domains like distributed sensor networks where groups must self-organize.
- Physical validation on robots with real communication noise would test whether the genetic tags remain effective outside simulation.
- Varying task complexity in experiments could show how quickly the method adapts the number of species.
Load-bearing premise
That evolved genetic tags and a selectivity gene will reliably enable emergent identification of symbiotically beneficial partners without predefined species boundaries, and that the dominance gene will correctly decouple swarm composition from the evolutionary population size.
What would settle it
Running SwarmCoDe on a task with clear need for distinct specializations and checking whether the output swarm develops separate functional groups that cooperate or whether composition stays tied to the evolutionary population size instead of the fabrication budget.
Figures






read the original abstract
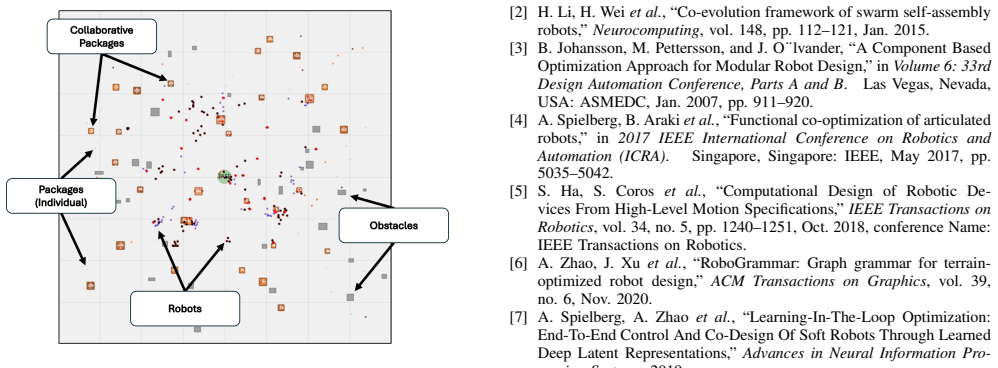
Robot swarms offer inherent robustness and the capacity to execute complex, collaborative tasks surpassing the capabilities of single-agent systems. Co-designing these systems is critical, as marginal improvements in individual performance or unit cost compound significantly at scale. However, under traditional frameworks, this scale renders co-design intractable due to exponentially large, non-intuitive design spaces. To address this, we propose SwarmCoDe, a novel Collaborative Co-Evolutionary Algorithm (CCEA) that utilizes dynamic speciation to automatically scale swarm heterogeneity to match task complexity. Inspired by biological signaling mechanisms for inter-species cooperation, the algorithm uses evolved genetic tags and a selectivity gene to facilitate the emergent identification of symbiotically beneficial partners without predefined species boundaries. Additionally, an evolved dominance gene dictates the relative swarm composition, decoupling the physical swarm size from the evolutionary population. We apply SwarmCoDe to simultaneously optimize task planning and hardware morphology under fabrication budgets, successfully evolving specialized swarms of up to 200 agents -- four times the size of the evolutionary population. This framework provides a scalable, computationally viable pathway for the holistic co-design of large-scale, heterogeneous robot swarms.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes SwarmCoDe, a Collaborative Co-Evolutionary Algorithm (CCEA) that employs dynamic speciation, evolved genetic tags, a selectivity gene for emergent partner identification, and a dominance gene to decouple physical swarm composition from evolutionary population size. It applies the framework to jointly optimize task planning and hardware morphology for heterogeneous robot swarms under fabrication budgets, claiming successful evolution of specialized swarms with up to 200 agents (four times the evolutionary population size).
Significance. If the scaling and decoupling results hold under rigorous validation, the work would offer a computationally viable path for co-designing large-scale heterogeneous swarms, mitigating the intractability of exponential design spaces via biologically inspired emergent mechanisms. The parameter-free aspects of speciation and the explicit handling of swarm size independent of evolutionary population are potential strengths, though the absence of reported metrics, baselines, ablations, or error bars limits assessment of impact.
major comments (2)
- Abstract: The central claim of evolving specialized swarms of 200 agents (four times the evolutionary population) rests on the dominance gene decoupling physical swarm size from evolutionary population size, yet no experiments are described that vary evolutionary population size while holding other parameters fixed and confirm the physical swarm size still reaches 200.
- Abstract: The statement of 'successful evolution' of 200-agent swarms provides no quantitative metrics, baselines, error bars, ablation studies, or validation details, leaving the load-bearing empirical result unsupported in the presented material.
minor comments (1)
- The selectivity gene and dominance gene are introduced without formal definitions, pseudocode, or explicit update rules; adding these in the methods would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comments point by point below and will revise the manuscript to strengthen the empirical support for the claims.
read point-by-point responses
-
Referee: Abstract: The central claim of evolving specialized swarms of 200 agents (four times the evolutionary population) rests on the dominance gene decoupling physical swarm size from evolutionary population size, yet no experiments are described that vary evolutionary population size while holding other parameters fixed and confirm the physical swarm size still reaches 200.
Authors: The results section demonstrates that the dominance gene enables physical swarm sizes up to 200 agents when the evolutionary population is 50. However, we acknowledge that a dedicated experiment explicitly varying only the evolutionary population size (while holding other parameters fixed) is not described. We will add this validation experiment or a clarifying analysis in the revised manuscript to rigorously confirm the decoupling. revision: yes
-
Referee: Abstract: The statement of 'successful evolution' of 200-agent swarms provides no quantitative metrics, baselines, error bars, ablation studies, or validation details, leaving the load-bearing empirical result unsupported in the presented material.
Authors: The main text (Sections 4 and 5) reports quantitative performance metrics, baseline comparisons, ablation studies on the genetic tags and selectivity/dominance genes, and error bars from repeated runs. The abstract summarizes the outcome due to length limits. We will revise the abstract to include key quantitative metrics and explicit references to the validation details in the main body. revision: yes
Circularity Check
No significant circularity: algorithmic framework is self-contained without reduction to fitted inputs or self-citations
full rationale
The paper presents SwarmCoDe as a novel CCEA using dynamic speciation, evolved genetic tags, selectivity gene, and dominance gene to enable scaling to 200 agents (4x evolutionary population size). No equations, derivations, or parameter-fitting steps are described that would make the headline scaling result equivalent to its inputs by construction. The dominance gene's decoupling of physical swarm size from evolutionary population is asserted as an emergent property of the algorithm rather than derived from a self-referential definition or prior self-citation. No load-bearing self-citations, uniqueness theorems, or ansatzes are invoked. The central claims rest on the independent algorithmic design and its empirical application to co-design under fabrication budgets, which do not reduce to tautological renaming or fitted predictions. This is the expected outcome for a primarily algorithmic contribution without mathematical derivations.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Biological signaling mechanisms for inter-species cooperation can be effectively modeled using evolved genetic tags and selectivity genes in robot swarm co-evolution.
invented entities (2)
-
selectivity gene
no independent evidence
-
dominance gene
no independent evidence
Forward citations
Cited by 1 Pith paper
-
Task-Driven Co-Design of Heterogeneous Multi-Robot Systems
A compositional framework based on monotone co-design theory enables joint optimization of robot design, fleet composition, and planning for heterogeneous multi-robot systems under task-specific constraints.
Reference graph
Works this paper leans on
-
[1]
Swarm robotics: a review from the swarm engineering perspective,
M. Brambilla, E. Ferranteet al., “Swarm robotics: a review from the swarm engineering perspective,”Swarm Intelligence, vol. 7, no. 1, pp. 1–41, Mar. 2013
work page 2013
-
[2]
Co-evolution framework of swarm self-assembly robots,
H. Li, H. Weiet al., “Co-evolution framework of swarm self-assembly robots,”Neurocomputing, vol. 148, pp. 112–121, Jan. 2015
work page 2015
-
[3]
A Component Based Optimization Approach for Modular Robot Design,
B. Johansson, M. Pettersson, and J. O¨lvander, “A Component Based Optimization Approach for Modular Robot Design,” inVolume 6: 33rd Design Automation Conference, Parts A and B. Las Vegas, Nevada, USA: ASMEDC, Jan. 2007, pp. 911–920
work page 2007
-
[4]
Functional co-optimization of articulated robots,
A. Spielberg, B. Arakiet al., “Functional co-optimization of articulated robots,” in2017 IEEE International Conference on Robotics and Automation (ICRA). Singapore, Singapore: IEEE, May 2017, pp. 5035–5042
work page 2017
-
[5]
Computational Design of Robotic De- vices From High-Level Motion Specifications,
S. Ha, S. Coroset al., “Computational Design of Robotic De- vices From High-Level Motion Specifications,”IEEE Transactions on Robotics, vol. 34, no. 5, pp. 1240–1251, Oct. 2018, conference Name: IEEE Transactions on Robotics
work page 2018
-
[6]
RoboGrammar: Graph grammar for terrain- optimized robot design,
A. Zhao, J. Xuet al., “RoboGrammar: Graph grammar for terrain- optimized robot design,”ACM Transactions on Graphics, vol. 39, no. 6, Nov. 2020
work page 2020
-
[7]
A. Spielberg, A. Zhaoet al., “Learning-In-The-Loop Optimization: End-To-End Control And Co-Design Of Soft Robots Through Learned Deep Latent Representations,”Advances in Neural Information Pro- cessing Systems, 2019
work page 2019
-
[8]
Multicopter Design Optimization and Validation,
O. Magnussen, M. Ottestad, and G. Hovland, “Multicopter Design Optimization and Validation,”Modeling, Identification and Control: A Norwegian Research Bulletin, vol. 36, no. 2, pp. 67–79, 2015
work page 2015
-
[9]
Constraint Programming for Component- Level Robot Design,
A. Wilhelm and N. Napp, “Constraint Programming for Component- Level Robot Design,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct. 2023, pp. 460–466
work page 2023
-
[10]
Robot Co-design: Beyond the Monotone Case,
L. Carlone and C. Pinciroli, “Robot Co-design: Beyond the Monotone Case,” in2019 International Conference on Robotics and Automation (ICRA), May 2019, pp. 3024–3030
work page 2019
-
[11]
On the Co-Design of A V-Enabled Mobility Systems,
G. Zardini, N. Lanzettiet al., “On the Co-Design of A V-Enabled Mobility Systems,” in2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Sep. 2020, pp. 1–8, arXiv:2003.04739 [eess]
-
[12]
Monotone Subsystem Decomposition for Efficient Multi-Objective Robot System Design,
A. Wilhelm and N. Napp, “Monotone Subsystem Decomposition for Efficient Multi-Objective Robot System Design,” in2025 IEEE International Conference on Robotics & Automation, 2025
work page 2025
-
[13]
Evolution of swarm robotics systems with novelty search,
J. Gomes, P. Urbano, and A. L. Christensen, “Evolution of swarm robotics systems with novelty search,”Swarm Intelligence, vol. 7, no. 2-3, pp. 115–144, Sep. 2013
work page 2013
-
[14]
Evolution of Self-Organized Task Specialization in Robot Swarms,
E. Ferrante, A. E. Turgutet al., “Evolution of Self-Organized Task Specialization in Robot Swarms,”PLOS Computational Biology, vol. 11, no. 8, p. e1004273, Aug. 2015
work page 2015
-
[15]
Generative encoding for multiagent learning,
D. B. D’Ambrosio and K. O. Stanley, “Generative encoding for multiagent learning,” inProceedings of the 10th annual conference on Genetic and evolutionary computation, ser. GECCO ’08. New York, NY , USA: Association for Computing Machinery, Jul. 2008, pp. 819–826
work page 2008
-
[16]
Collective Special- ization for Evolutionary Design of a Multi-robot System,
A. E. Eiben, G. S. Nitschke, and M. C. Schut, “Collective Special- ization for Evolutionary Design of a Multi-robot System,” inSwarm Robotics, E. Sahin, W. M. Spears, and A. F. T. Winfield, Eds. Berlin, Heidelberg: Springer Berlin Heidelberg, 2007, vol. 4433, pp. 189–205, series Title: Lecture Notes in Computer Science
work page 2007
-
[17]
Emergence of Specialised Collective Behaviors in Evolving Heterogeneous Swarms,
F. Van Diggelen, M. De Carloet al., “Emergence of Specialised Collective Behaviors in Evolving Heterogeneous Swarms,” inParallel Problem Solving from Nature - PPSN XVIII, M. Affenzeller, S. M. Winkleret al., Eds. Cham: Springer Nature Switzerland, 2024, vol. 15149, pp. 53–69, series Title: Lecture Notes in Computer Science
work page 2024
-
[18]
Evolving neural networks with collaborative species,
M. A. Potter and K. A. D. Jong, “Evolving neural networks with collaborative species,” inSummer Computer Simulation Conference. SOCIETY FOR COMPUTER SIMULATION, ETC, 1995
work page 1995
-
[19]
A Survey on Cooperative Co-Evolutionary Al- gorithms,
X. Ma, X. Liet al., “A Survey on Cooperative Co-Evolutionary Al- gorithms,”IEEE Transactions on Evolutionary Computation, vol. 23, no. 3, pp. 421–441, Jun. 2019
work page 2019
-
[20]
Dynamic Team Het- erogeneity in Cooperative Coevolutionary Algorithms,
J. Gomes, P. Mariano, and A. L. Christensen, “Dynamic Team Het- erogeneity in Cooperative Coevolutionary Algorithms,”IEEE Trans- actions on Evolutionary Computation, vol. 22, no. 6, pp. 934–948, Dec. 2018
work page 2018
-
[21]
Species based evolutionary algo- rithms for multimodal optimization: A brief review,
J.-P. Li, X.-D. Li, and A. Wood, “Species based evolutionary algo- rithms for multimodal optimization: A brief review,” inIEEE Congress on Evolutionary Computation, Jul. 2010, pp. 1–8
work page 2010
-
[22]
Evolving Neural Networks through Augmenting Topologies,
K. O. Stanley and R. Miikkulainen, “Evolving Neural Networks through Augmenting Topologies,”Evolutionary Computation, vol. 10, no. 2, pp. 99–127, Jun. 2002
work page 2002
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.