Recognition: no theorem link
4D Vessel Reconstruction for Benchtop Thrombectomy Analysis
Pith reviewed 2026-05-10 18:11 UTC · model grok-4.3
The pith
A nine-camera multi-view workflow with 4D Gaussian Splatting delivers standardized time-resolved vessel surface kinematics and comparative stress proxies for thrombectomy benchtop studies.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
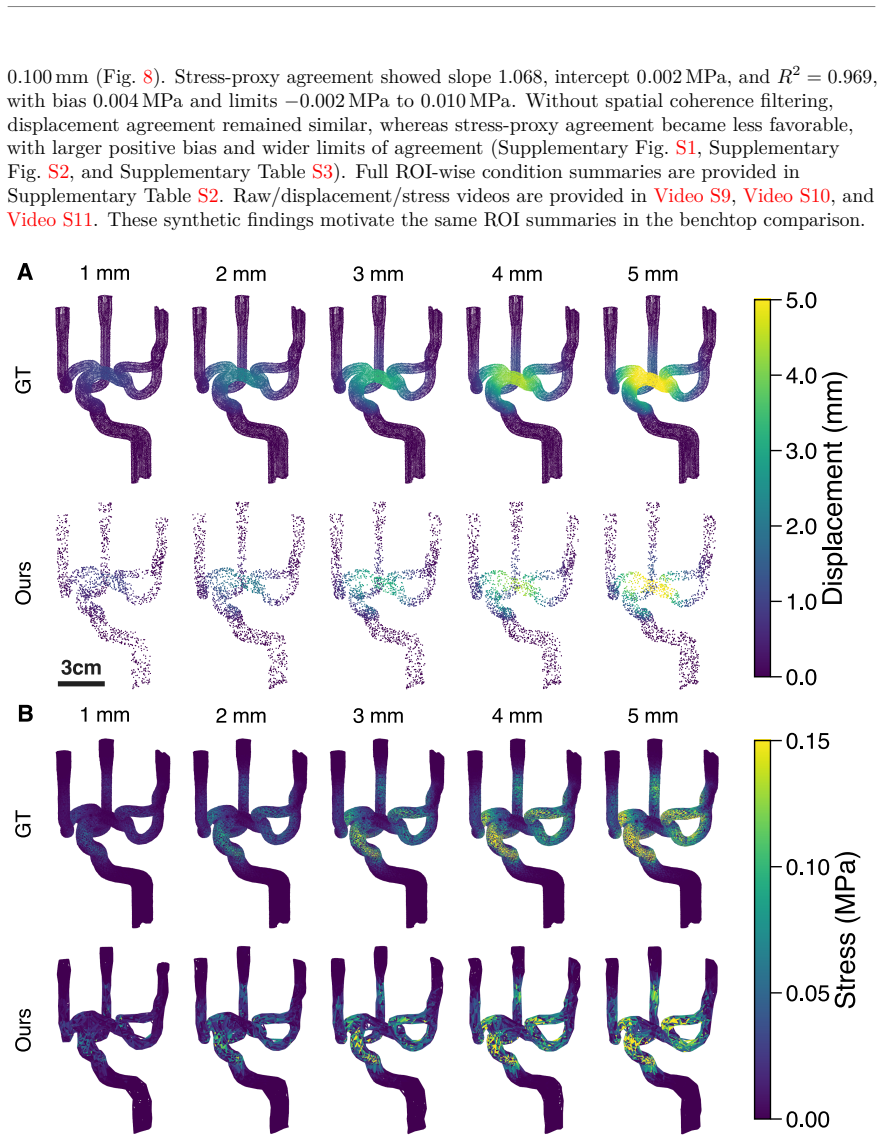
The paper establishes that its nine-camera multi-view imaging and 4D Gaussian Splatting reconstruction protocol provides standardized, time-resolved surface kinematics together with comparative relative displacement and stress-proxy measurements suitable for thrombectomy benchtop studies. In synthetic bulk-translation tests the stress proxy stays near zero for most edges, while synthetic pulling deformations of 1-5 mm produce Chamfer distances of 1.714-1.815 mm and high precision at the 1 mm threshold. Early benchtop trials indicate higher maximum-median ROI displacement and stress-proxy values for cervical aspiration-catheter placement than for internal-carotid-artery-terminus placement.
What carries the argument
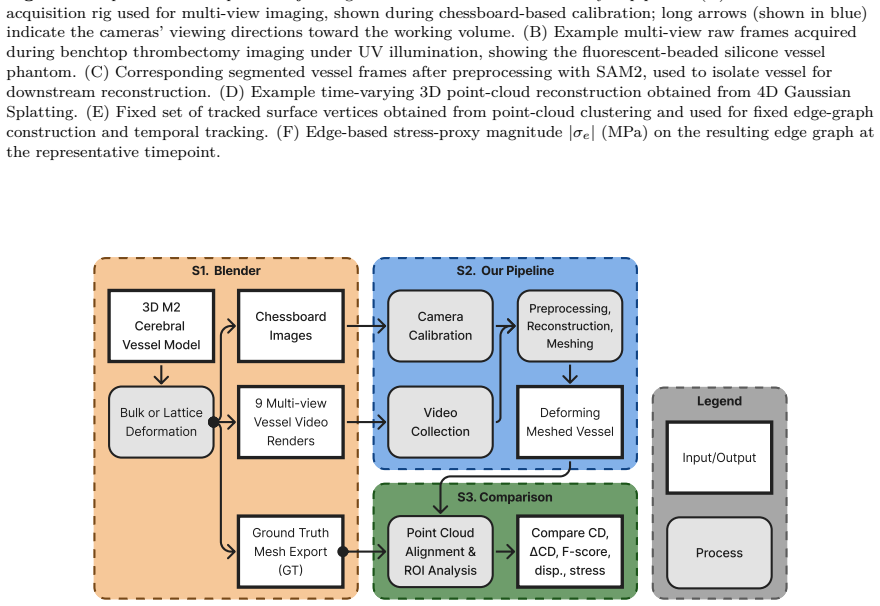
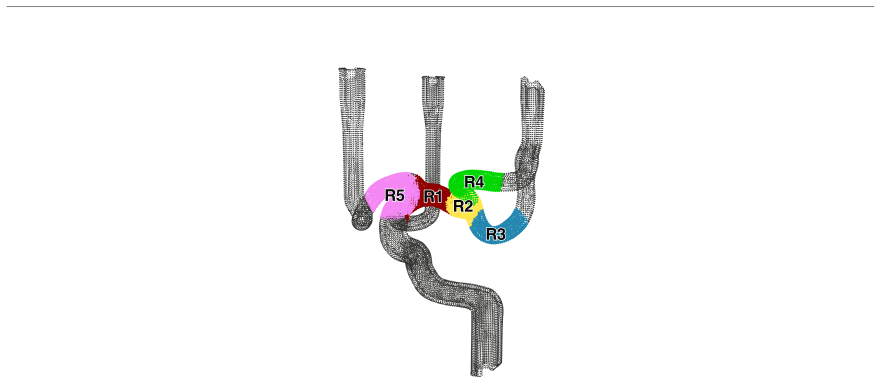
4D Gaussian Splatting reconstruction of calibrated multi-view videos into point clouds that are converted to fixed-connectivity edge graphs; the graphs support ROI displacement tracking and Neo-Hookean mapping of edge stretches to produce comparative surface stress proxies.
If this is right
- The protocol supports direct quantitative comparisons between different thrombectomy device placements or conditions in the same benchtop setup.
- It supplies time-resolved data at 20 frames per second that can be used for temporal analysis of deformation events.
- All reported metrics remain comparative proxies rather than absolute wall-stress estimates.
- A synthetic Blender validation pipeline confirms geometric and temporal accuracy before real-phantom use.
- Open code and example data allow other groups to replicate or extend the measurements.
Where Pith is reading between the lines
- The same multi-view reconstruction approach could be adapted to study deformation in other soft-tissue benchtop models beyond cerebral vessels.
- Combining the surface kinematics with computational fluid dynamics simulations might reveal coupled mechanical and flow effects during thrombectomy.
- The fixed edge-graph representation could facilitate direct comparison with finite-element vessel models for hybrid experimental-computational studies.
- Increasing camera count or frame rate could extend the method to faster dynamic events in future device testing.
Load-bearing premise
The 4D Gaussian Splatting reconstruction accurately recovers true surface deformations without substantial multi-view artifacts or segmentation errors, and the Neo-Hookean mapping applied to edge stretches yields a reliable comparative stress proxy.
What would settle it
Independent strain measurements from fiducial markers embedded in the phantom surface under controlled loads that deviate substantially from the edge-stretch values and derived stress proxies obtained by the reconstruction pipeline.
Figures







read the original abstract
Introduction: Mechanical thrombectomy can cause vessel deformation and procedure-related injury. Benchtop models are widely used for device testing, but time-resolved, full-field 3D vessel-motion measurements remain limited. Methods: We developed a nine-camera, low-cost multi-view workflow for benchtop thrombectomy in silicone middle cerebral artery phantoms (2160p, 20 fps). Multi-view videos were calibrated, segmented, and reconstructed with 4D Gaussian Splatting. Reconstructed point clouds were converted to fixed-connectivity edge graphs for region-of-interest (ROI) displacement tracking and a relative surface-based stress proxy. Stress-proxy values were derived from edge stretch using a Neo-Hookean mapping and reported as comparative surface metrics. A synthetic Blender pipeline with known deformation provided geometric and temporal validation. Results: In synthetic bulk translation, the stress proxy remained near zero for most edges (median $\approx$ 0 MPa; 90th percentile 0.028 MPa), with sparse outliers. In synthetic pulling (1-5 mm), reconstruction showed close geometric and temporal agreement with ground truth, with symmetric Chamfer distance of 1.714-1.815 mm and precision of 0.964-0.972 at $\tau = 1$ mm. In preliminary benchtop comparative trials (one trial per condition), cervical aspiration catheter placement showed higher max-median ROI displacement and stress-proxy values than internal carotid artery terminus placement. Conclusion: The proposed protocol provides standardized, time-resolved surface kinematics and comparative relative displacement and stress proxy measurements for thrombectomy benchtop studies. The framework supports condition-to-condition comparisons and methods validation, while remaining distinct from absolute wall-stress estimation. Implementation code and example data are available at https://ethanuser.github.io/vessel4D
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a nine-camera multi-view workflow for time-resolved 3D reconstruction of silicone vessel phantoms during benchtop thrombectomy using 4D Gaussian Splatting. Reconstructed surfaces are converted to fixed-connectivity edge graphs to track ROI displacements and compute a relative stress proxy from edge stretches via a fixed Neo-Hookean mapping. Synthetic validation with Blender ground truth reports Chamfer distances of 1.714-1.815 mm and precision 0.964-0.972; preliminary real-data trials (one per condition) indicate higher max-median displacement and stress-proxy values for cervical versus ICA-terminus catheter placement. The work provides open code and positions the output as standardized comparative metrics rather than absolute wall stress.
Significance. If the reconstruction fidelity and comparative reliability hold under repeated real acquisitions, the protocol would address a clear gap in benchtop thrombectomy analysis by delivering accessible, time-resolved surface kinematics and relative deformation metrics. The concrete quantitative synthetic validation (Chamfer/precision numbers) and public implementation are notable strengths that support reproducibility and methods validation.
major comments (2)
- [Results (benchtop experiments)] Results (benchtop comparative trials): Only a single trial is reported per catheter-placement condition, with no within-condition standard deviations, repeatability metrics, or error propagation from the 4D Gaussian Splatting/edge-graph pipeline. This is load-bearing for the central claim of providing reliable standardized comparative metrics, because the reported elevation in max-median ROI displacement and stress-proxy values for cervical vs. ICA-terminus placement cannot yet be distinguished from reconstruction artifacts, lighting variability, or single-run stochastic effects (synthetic validation does not replicate these real-acquisition factors).
- [Methods (stress proxy)] Methods (stress-proxy derivation): The relative surface-based stress proxy is obtained by applying a fixed Neo-Hookean mapping directly to reconstructed edge stretches without sensitivity analysis on the material constants or independent validation against known stress fields. While the paper correctly labels it comparative rather than absolute, the lack of quantification of how constant choice propagates into the reported differences weakens the robustness of condition-to-condition comparisons.
minor comments (2)
- [Abstract] Abstract and Conclusion: The phrasing 'provides standardized... measurements' is stronger than the 'preliminary' qualifier and single-trial description used in the real-data results; harmonizing this language would improve consistency.
- [Figures] Figure clarity: The edge-graph visualization and ROI definition would benefit from explicit annotation of how fixed connectivity is enforced across time frames to avoid reader confusion about topology changes.
Simulated Author's Rebuttal
We thank the referee for the constructive review and for recognizing the strengths of our synthetic validation and open-source code. We address each major comment below with honest revisions to the manuscript where feasible.
read point-by-point responses
-
Referee: [Results (benchtop experiments)] Results (benchtop comparative trials): Only a single trial is reported per catheter-placement condition, with no within-condition standard deviations, repeatability metrics, or error propagation from the 4D Gaussian Splatting/edge-graph pipeline. This is load-bearing for the central claim of providing reliable standardized comparative metrics, because the reported elevation in max-median ROI displacement and stress-proxy values for cervical vs. ICA-terminus placement cannot yet be distinguished from reconstruction artifacts, lighting variability, or single-run stochastic effects (synthetic validation does not replicate these real-acquisition factors).
Authors: We agree that the benchtop results rely on single trials per condition and therefore lack within-condition standard deviations or repeatability metrics. The manuscript already describes these as preliminary trials, with the core contribution being a reproducible protocol for standardized comparative metrics rather than statistically powered condition comparisons. In the revised manuscript we will add an explicit limitations paragraph in the Discussion that (i) enumerates real-acquisition variability sources (reconstruction artifacts, lighting, phantom positioning), (ii) propagates uncertainty bounds derived from the synthetic Chamfer/precision figures to the reported real-data displacements and stress-proxy values, and (iii) states that future multi-trial studies are required to confirm the observed trends. This textual clarification addresses the referee’s concern without overstating current statistical reliability. revision: partial
-
Referee: [Methods (stress proxy)] Methods (stress-proxy derivation): The relative surface-based stress proxy is obtained by applying a fixed Neo-Hookean mapping directly to reconstructed edge stretches without sensitivity analysis on the material constants or independent validation against known stress fields. While the paper correctly labels it comparative rather than absolute, the lack of quantification of how constant choice propagates into the reported differences weakens the robustness of condition-to-condition comparisons.
Authors: We accept that a sensitivity analysis on the Neo-Hookean parameters would strengthen the presentation. Although the proxy is labeled comparative and not absolute, quantifying parameter influence on the reported differences is warranted. In the revised manuscript we will add a sensitivity study that varies the shear modulus and bulk modulus over a range drawn from silicone-phantom literature, recomputes the max-median stress-proxy values for both catheter-placement conditions, and shows that the relative ordering and magnitude of differences remain stable. The new analysis will be inserted in the Methods section with a brief Results paragraph summarizing the outcome. revision: yes
- The absence of multiple independent real-acquisition trials prevents reporting of within-condition standard deviations or formal repeatability statistics for the benchtop comparative results.
Circularity Check
No significant circularity in the derivation chain
full rationale
The paper's workflow proceeds from multi-view video acquisition through standard calibration and segmentation, 4D Gaussian Splatting reconstruction, fixed-connectivity edge-graph conversion, ROI displacement tracking, and a direct Neo-Hookean mapping applied to measured edge stretches to obtain the stress proxy. None of these steps reduce to their own inputs by construction, nor are any load-bearing premises justified solely by self-citation. Synthetic validation employs an independent Blender pipeline with prescribed ground-truth deformations, supplying external geometric and temporal benchmarks rather than self-referential checks. The reported comparative benchtop metrics are straightforward outputs of the pipeline; no parameters are fitted to target data and then re-presented as predictions. The derivation therefore remains self-contained against the stated external validation.
Axiom & Free-Parameter Ledger
free parameters (1)
- Neo-Hookean material constants
axioms (2)
- standard math Multi-view camera calibration accurately recovers 3D positions from synchronized 2D images.
- domain assumption Silicone phantom deformation can be approximated by a Neo-Hookean hyperelastic model for relative stress comparison.
invented entities (1)
-
relative surface-based stress proxy
no independent evidence
Reference graph
Works this paper leans on
-
[1]
T. Ishiguro, Y. Omura, Y. Takano, T. Arai, K. Karagiozov, K. Fukuda, Y. Kikuta, N. Momozaki, H. Eguchi, M. Nishitani, M. Sakaguchi, M. Uchida, M. Suzuki, T. Kawamata, Low radial and axial force stent retriever reduces symptomatic subarachnoid hemorrhage after mechanical thrombectomy for acute middle cerebral artery and medium vessel occlusion: A prospecti...
-
[2]
A. A. Dmytriw, B. Musmar, H. Salim, S. Ghozy, J. E. Siegler, H. Kobeissi, H. Shaikh, J. Khalife, M. Abdalkader, P. Klein, T. N. Nguyen, J. J. Heit, R. W. Regenhardt, N. M. Cancelliere, J. D. Bernstock, K. E. Naamani, A. Amllay, L. Meyer, A. Dusart, F. Bellante, G. Forestier, A. Rouchaud, S. Saleme, C. Mounayer, J. Fiehler, A. L. Kühn, A. S. Puri, C. Dyzma...
-
[3]
Y. Liu, M. Abbasi, J. L. Arturo Larco, R. Kadirvel, D. F. Kallmes, W. Brinjikji, L. Savastano, Preclinical testing platforms for mechanical thrombectomy in stroke: A review on phantoms, in-vivo animal, and cadaveric models, Journal of Neurointerventional Surgery 13 (2021) 816–822. doi:10.1136/neurintsurg-2020-017133. 1, 12
-
[4]
S. Johnson, A. Dwivedi, M. Mirza, R. McCarthy, M. Gilvarry, A Review of the Advancements in the in-vitro Modelling of Acute Ischemic Stroke and Its Treatment, Frontiers in Medical Technology 4 (Jun. 2022).doi:10.3389/fmedt.2022.879074. 1, 12
-
[5]
D. A. Poulos, M. T. Froehler, B. C. Good, Investigation of stent retriever removal forces in an experimental model of acute ischemic stroke, Frontiers in Neurology 15 (Oct. 2024). doi:10.3389/fneur.2024.1486738. 1, 12
-
[6]
M. Nagargoje, The role of friction forces in arterial mechanical thrombectomy: A review, Journal of Biomechanics 192 (2025) 112966.doi:10.1016/j.jbiomech.2025.112966. 1, 12
-
[7]
M. Ernst, F. Sommer, M. Bartl, C. H. Riedel, P. Langer, Making the invisible visible: Integrated visualization and automated quantification of thrombus deformation during mechanical thrombectomy, Frontiers in Medical Technology 8 (Jan. 2026).doi:10.3389/fmedt.2026.1704010. 1
-
[8]
D. Solav, K. M. Moerman, A. M. Jaeger, K. Genovese, H. M. Herr, MultiDIC: An Open-Source Toolbox for Multi-View 3D Digital Image Correlation, IEEE Access 6 (2018) 30520–30535. doi:10.1109/ACCESS.2018.2843725. 2
-
[9]
M. Palanca, G. Tozzi, L. Cristofolini, The use of digital image correlation in the biomechanical area: A review, International Biomechanics 3 (2016) 1–21.doi:10.1080/23335432.2015.1117395. 2
-
[10]
A. C. Sanchez, D.-K. Kim, Assessment of the Film-Free Water Decal Method for Speckle Pattern Application in Digital Image Correlation, Sensors (Basel, Switzerland) 24 (2024) 5657. doi:10.3390/s24175657. 2
-
[11]
A. Mustafa, M. Volino, H. Kim, J.-Y. Guillemaut, A. Hilton, Temporally Coherent General Dynamic Scene Reconstruction, International Journal of Computer Vision 129 (2021) 123–141. doi:10.1007/s11263-020-01367-2. 2
-
[12]
G. Wu, T. Yi, J. Fang, L. Xie, X. Zhang, W. Wei, W. Liu, Q. Tian, X. Wang, 4D Gaussian Splatting for Real-Time Dynamic Scene Rendering (Jul. 2024).doi:10.48550/arXiv.2310.08528. 2, 4
-
[13]
H. Kortman, E. Smit, M. Oei, R. Manniesing, M. Prokop, F. Meijer, 4D-CTA in Neurovascular Disease: A Review, AJNR: American Journal of Neuroradiology 36 (2015) 1026–1033.doi:10.3174/ajnr.A4162. 2 14
-
[14]
N. Kaneko, T. Mashiko, T. Ohnishi, M. Ohta, K. Namba, E. Watanabe, K. Kawai, Manufacture of patient-specific vascular replicas for endovascular simulation using fast, low-cost method, Scientific Reports 6 (2016) 39168.doi:10.1038/srep39168. 2
-
[15]
Z. Zhang, A flexible new technique for camera calibration, IEEE Transactions on Pattern Analysis and Machine Intelligence 22 (2000) 1330–1334.doi:10.1109/34.888718. 3
-
[16]
Bradski, The OpenCV library, Dr
G. Bradski, The OpenCV library, Dr. Dobb’s Journal of Software Tools (2000). 3
2000
-
[17]
N. Ravi, V. Gabeur, Y.-T. Hu, R. Hu, C. Ryali, T. Ma, H. Khedr, R. Rädle, C. Rolland, L. Gustafson, E. Mintun, J. Pan, K. V. Alwala, N. Carion, C.-Y. Wu, R. Girshick, P. Dollár, C. Feichtenhofer, SAM 2: Segment Anything in Images and Videos (Oct. 2024).doi:10.48550/arXiv.2408.00714. 3
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2408.00714 2024
-
[18]
J. MacQueen, Some methods for classification and analysis of multivariate observations, in: Proceedings of the Fifth Berkeley Symposium on Mathematical Statistics and Probability, Volume 1: Statistics, Vol. 5.1, University of California Press, 1967, pp. 281–298. 4
1967
-
[19]
Ester, H.-P
M. Ester, H.-P. Kriegel, J. Sander, X. Xu, A density-based algorithm for discovering clusters in large spatial databases with noise, in: Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, KDD’96, AAAI Press, Portland, Oregon, 1996, pp. 226–231. 4
1996
-
[20]
Scikit-learn: Machine Learning in Python
F. Pedregosa, G. Varoquaux, A. Gramfort, V. Michel, B. Thirion, O. Grisel, M. Blondel, A. Müller, J. Nothman, G. Louppe, P. Prettenhofer, R. Weiss, V. Dubourg, J. Vanderplas, A. Passos, D. Cournapeau, M. Brucher, M. Perrot, É. Duchesnay, Scikit-learn: Machine Learning in Python, https://arxiv.org/abs/1201.0490v4 (Jan. 2012). 4
work page Pith review arXiv 2012
-
[21]
P. Virtanen, R. Gommers, T. E. Oliphant, M. Haberland, T. Reddy, D. Cournapeau, E. Burovski, P. Peterson, W. Weckesser, J. Bright, S. J. van der Walt, M. Brett, J. Wilson, K. J. Millman, N. Mayorov, A. R. J. Nelson, E. Jones, R. Kern, E. Larson, C. J. Carey, İ. Polat, Y. Feng, E. W. Moore, J. VanderPlas, D. Laxalde, J. Perktold, R. Cimrman, I. Henriksen, ...
-
[22]
G. Taubin, A signal processing approach to fair surface design, in: Proceedings of the 22nd Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH ’95, Association for Computing Machinery, New York, NY, USA, 1995, pp. 351–358.doi:10.1145/218380.218473. 4
-
[23]
P. Perona, J. Malik, Scale-space and edge detection using anisotropic diffusion, IEEE Transactions on Pattern Analysis and Machine Intelligence 12 (1990) 629–639.doi:10.1109/34.56205. 4
-
[24]
M. Black, G. Sapiro, D. Marimont, D. Heeger, Robust anisotropic diffusion, IEEE Transactions on Image Processing 7 (1998) 421–432.doi:10.1109/83.661192. 4
-
[25]
M. J. Black, P. Anandan, The Robust Estimation of Multiple Motions: Parametric and Piecewise-Smooth Flow Fields, Computer Vision and Image Understanding 63 (1996) 75–104. doi:10.1006/cviu.1996.0006. 4
-
[26]
P. J. Huber, Robust Estimation of a Location Parameter, The Annals of Mathematical Statistics 35 (1964) 73–101.doi:10.1214/aoms/1177703732. 5
-
[27]
P. J. Rousseeuw, C. Croux, Alternatives to the Median Absolute Deviation, Journal of the American Statistical Association 88 (1993) 1273–1283.doi:10.1080/01621459.1993.10476408. 5
-
[28]
G. A. Holzapfel, Nonlinear Solid Mechanics: A Continuum Approach for Engineering, Kluwer Academic Publishers Dordrecht, 2000. 5
2000
-
[29]
J. Y. Chueh, A. K. Wakhloo, M. J. Gounis, Neurovascular Modeling: Small-Batch Manufacturing of Silicone Vascular Replicas, American Journal of Neuroradiology 30 (2009) 1159–1164. doi:10.3174/ajnr.A1543. 5
-
[30]
K. Gong, Z. Wen, M. Xu, W. He, Q. Wang, N. Zhang, Z. Li, C. Li, D. Lian, W. Zhao, X. He, M. Zhang, SWiT-4D: Sliding-Window Transformer for Lossless and Parameter-Free Temporal 4D Generation (Dec. 2025).doi:10.48550/arXiv.2512.10860. 7
-
[31]
J. M. Bland, D. G. Altman, Statistical methods for assessing agreement between two methods of clinical measurement, Lancet 1 (1986) 307–310. 8
1986
-
[32]
Y. Nariai, T. Takigawa, A. Hyodo, K. Suzuki, Modification by an aspiration catheter for vessel stretching in thrombectomy using a stent retriever in vitro, Journal of Stroke and Cerebrovascular Diseases 32 (Mar. 2023).doi:10.1016/j.jstrokecerebrovasdis.2022.106948. 12
work page doi:10.1016/j.jstrokecerebrovasdis.2022.106948 2023
-
[33]
S. H. Baek, S. Kim, M. Kang, J.-H. Choi, H. J. Kwon, D. W. Kim, Effect of distal access catheter tip position on angiographic and clinical outcomes following thrombectomy using the combined stent-retriever and aspiration approach, PLoS ONE 16 (2021) e0252641. doi:10.1371/journal.pone.0252641. 12
-
[34]
K. Kawamoto, Y. Nagao, M. Naganuma, Y. Inatomi, Y. Hashimoto, T. Yonehara, M. Nakajima, Stent-retriever characteristics and strategies associated with recanalization in thrombectomy for acute ischemic stroke, Clinical Neurology and Neurosurgery 242 (2024) 108332. doi:10.1016/j.clineuro.2024.108332. 12
-
[35]
G. Luraghi, J. F. Rodriguez Matas, G. Dubini, F. Berti, S. Bridio, S. Duffy, A. Dwivedi, R. McCarthy, B. Fereidoonnezhad, P. McGarry, C. B. L. M. Majoie, F. Migliavacca, INSIST investigators, 15 Applicability assessment of a stent-retriever thrombectomy finite-element model, Interface Focus 11 (2021) 20190123.doi:10.1098/rsfs.2019.0123. 12
-
[36]
S. M. Mousavi J S, D. Faghihi, K. Sommer, M. M. S. Bhurwani, T. R. Patel, B. Santo, M. Waqas, C. Ionita, E. I. Levy, A. H. Siddiqui, V. M. Tutino, Realistic computer modelling of stent retriever thrombectomy: A hybrid finite-element analysis-smoothed particle hydrodynamics model, Journal of the Royal Society, Interface 18 (2021) 20210583.doi:10.1098/rsif....
-
[37]
A. Guédon, V. Lepetit, SuGaR: Surface-Aligned Gaussian Splatting for Efficient 3D Mesh Reconstruction and High-Quality Mesh Rendering (Dec. 2023).doi:10.48550/arXiv.2311.12775. 13
-
[38]
W. Cai, W. Ye, P. Ye, T. He, T. Chen, DynaSurfGS: Dynamic Surface Reconstruction with Planar-based Gaussian Splatting (Aug. 2024).doi:10.48550/arXiv.2408.13972. 13
-
[39]
I. Liu, H. Su, X. Wang, Dynamic Gaussians Mesh: Consistent Mesh Reconstruction from Dynamic Scenes (Mar. 2025).doi:10.48550/arXiv.2404.12379. 13
-
[40]
Zheng, L
C. Zheng, L. Xue, J. Zarate, J. Song, GauSTAR: Gaussian Surface Tracking and Reconstruction, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025, pp. 16543–16553. 13
2025
-
[41]
S. Ma, Y. Luo, W. Yang, Y. Yang, MaGS: Reconstructing and Simulating Dynamic 3D Objects with Mesh-adsorbed Gaussian Splatting (Nov. 2024).doi:10.48550/arXiv.2406.01593. 13
-
[42]
C.-Y. Yang, H.-W. Huang, W. Chai, Z. Jiang, J.-N. Hwang, SAMURAI: Adapting Segment Anything Model for Zero-Shot Visual Tracking with Motion-Aware Memory (Nov. 2024). doi:10.48550/arXiv.2411.11922. 13
-
[43]
H. K. Cheng, S. W. Oh, B. Price, J.-Y. Lee, A. Schwing, Putting the Object Back into Video Object Segmentation (Apr. 2024).doi:10.48550/arXiv.2310.12982. 13
-
[44]
H. K. Cheng, S. W. Oh, B. Price, A. Schwing, J.-Y. Lee, Tracking Anything with Decoupled Video Segmentation (Sep. 2023).doi:10.48550/arXiv.2309.03903. 13
-
[45]
SAM 3: Segment Anything with Concepts
N. Carion, L. Gustafson, Y.-T. Hu, S. Debnath, R. Hu, D. Suris, C. Ryali, K. V. Alwala, H. Khedr, A. Huang, J. Lei, T. Ma, B. Guo, A. Kalla, M. Marks, J. Greer, M. Wang, P. Sun, R. Rädle, T. Afouras, E. Mavroudi, K. Xu, T.-H. Wu, Y. Zhou, L. Momeni, R. Hazra, S. Ding, S. Vaze, F. Porcher, F. Li, S. Li, A. Kamath, H. K. Cheng, P. Dollár, N. Ravi, K. Saenko...
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2511.16719 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.