Recognition: no theorem link
Genie Sim PanoRecon: Fast Immersive Scene Generation from Single-View Panorama
Pith reviewed 2026-05-10 18:18 UTC · model grok-4.3
The pith
A single panorama converts into a consistent 3D scene in seconds through parallel cube-face Gaussian splatting with depth guidance.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
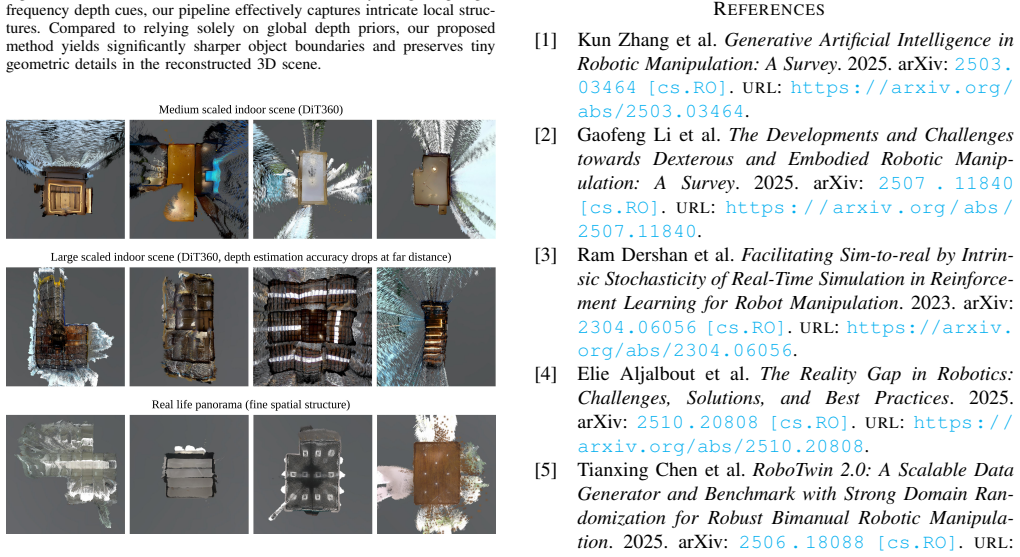
Genie Sim PanoRecon is a feed-forward Gaussian-splatting pipeline that decomposes a single panorama into six non-overlapping cube-map faces, processes them in parallel, and reassembles them via a depth-aware fusion strategy paired with a training-free depth-injection module that produces coherent 3D Gaussians, delivering photo-realistic scenes in seconds for use as scalable backgrounds in robotic manipulation simulation inside the Genie Sim platform.
What carries the argument
The depth-aware fusion strategy with training-free depth-injection module that steers the monocular network to output geometrically consistent 3D Gaussians across the reassembled cube-map views.
Load-bearing premise
The depth-injection module can enforce geometric consistency across the six views without any additional training on the network.
What would settle it
If renderings of the output 3D scene from new camera angles show visible seams, depth jumps, or misaligned surfaces between the original six directions, the consistency claim would be disproven.
Figures






read the original abstract
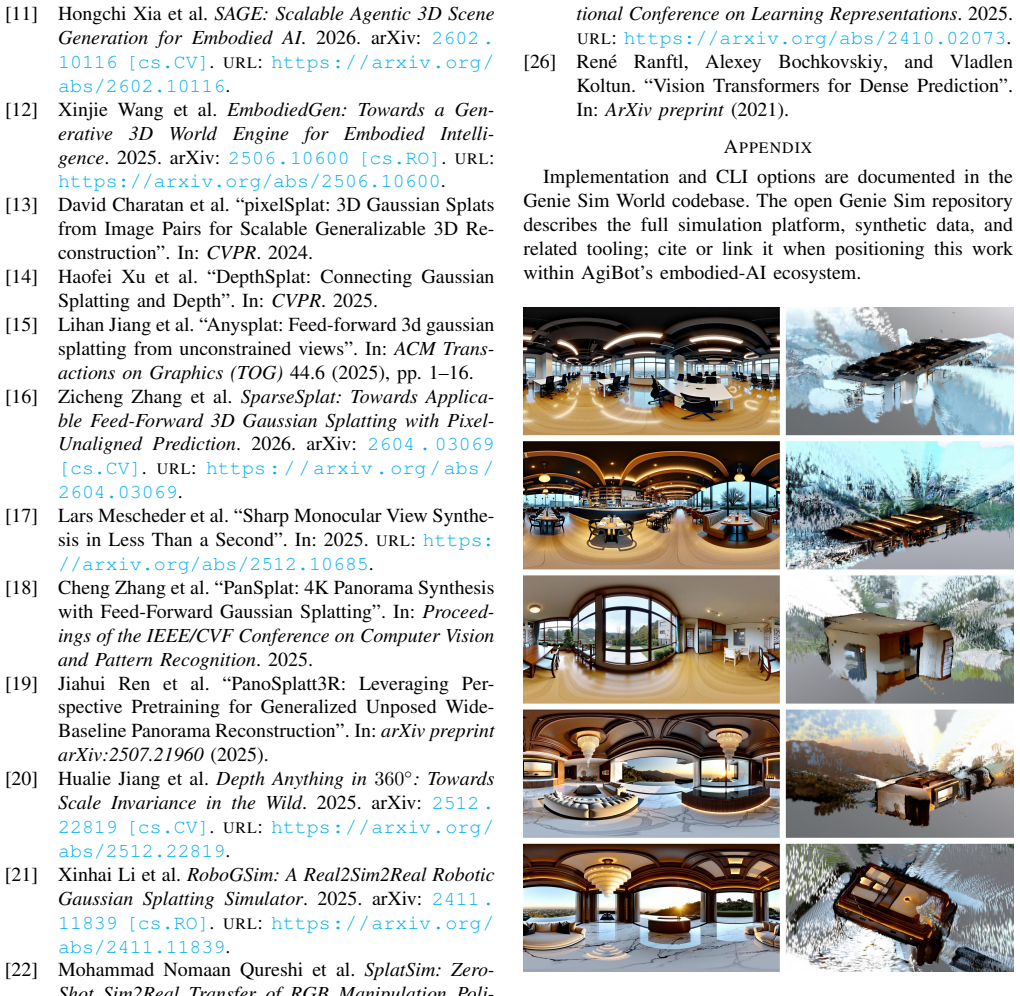
We present Genie Sim PanoRecon, a feed-forward Gaussian-splatting pipeline that delivers high-fidelity, low-cost 3D scenes for robotic manipulation simulation. The panorama input is decomposed into six non-overlapping cube-map faces, processed in parallel, and seamlessly reassembled. To guarantee geometric consistency across views, we devise a depth-aware fusion strategy coupled with a training-free depth-injection module that steers the monocular feed-forward network to generate coherent 3D Gaussians. The whole system reconstructs photo-realistic scenes in seconds and has been integrated into Genie Sim - a LLM-driven simulation platform for embodied synthetic data generation and evaluation - to provide scalable backgrounds for manipulation tasks. For code details, please refer to: https://github.com/AgibotTech/genie_sim/tree/main/source/geniesim_world.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Genie Sim PanoRecon, a feed-forward Gaussian-splatting pipeline for generating high-fidelity 3D scenes from a single panorama input for robotic manipulation simulation. The panorama is decomposed into six non-overlapping cube-map faces that are processed in parallel by a monocular feed-forward network and then reassembled; geometric consistency is claimed to be ensured by a depth-aware fusion strategy together with a training-free depth-injection module that steers the network to produce coherent 3D Gaussians. The system is reported to reconstruct photo-realistic scenes in seconds and has been integrated into the Genie Sim LLM-driven simulation platform, with code referenced at a GitHub repository.
Significance. If the performance claims are substantiated, the work could provide a practical, low-cost route to scalable immersive scene generation for embodied AI simulation, directly supporting synthetic data pipelines. The explicit link to an open GitHub repository containing implementation details is a clear strength that aids reproducibility.
major comments (2)
- [Abstract] Abstract: the central claim that the 'depth-aware fusion strategy coupled with a training-free depth-injection module' guarantees geometric consistency across non-overlapping cube faces and produces coherent 3D Gaussians is unsupported by any equations, pseudocode, or mechanism description; the manuscript supplies no account of how monocular scale ambiguity or view-dependent depth errors are resolved without overlap or learned alignment.
- [Abstract] Abstract: no quantitative results, ablation studies, error metrics (e.g., depth consistency, PSNR/SSIM, or geometric error), or baseline comparisons are reported, so the assertions of 'high-fidelity' output and 'guaranteed' consistency lack empirical grounding and cannot be evaluated.
minor comments (1)
- The GitHub link is useful but the paper should include a concise implementation overview or pseudocode block to make the fusion and injection steps self-contained.
Simulated Author's Rebuttal
We thank the referee for their valuable comments. We respond to each major comment below and have made revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the 'depth-aware fusion strategy coupled with a training-free depth-injection module' guarantees geometric consistency across non-overlapping cube faces and produces coherent 3D Gaussians is unsupported by any equations, pseudocode, or mechanism description; the manuscript supplies no account of how monocular scale ambiguity or view-dependent depth errors are resolved without overlap or learned alignment.
Authors: We agree that the abstract does not include equations or pseudocode detailing the mechanism. The full manuscript provides a conceptual description but lacks the requested technical details. In the revision, we will include equations describing the depth-injection process and the fusion strategy, along with pseudocode, to explain how scale ambiguity is resolved by depth normalization and how consistency is achieved through 3D projection using cube-map geometry. revision: yes
-
Referee: [Abstract] Abstract: no quantitative results, ablation studies, error metrics (e.g., depth consistency, PSNR/SSIM, or geometric error), or baseline comparisons are reported, so the assertions of 'high-fidelity' output and 'guaranteed' consistency lack empirical grounding and cannot be evaluated.
Authors: We acknowledge the absence of quantitative evaluations in the current manuscript. We will add a new section or subsection with quantitative metrics such as PSNR, SSIM, depth error, and geometric consistency measures, along with ablation studies on the key components and comparisons to relevant baselines. This will provide empirical support for the claims of high-fidelity and consistency. revision: yes
Circularity Check
No circularity detected; pipeline claims are independent of self-referential definitions
full rationale
The paper introduces a feed-forward Gaussian-splatting pipeline that decomposes a single-view panorama into six non-overlapping cube-map faces, processes them in parallel via a monocular network, and reassembles them using a depth-aware fusion strategy plus a training-free depth-injection module. No derivation step reduces by construction to its own inputs: there are no fitted parameters renamed as predictions, no self-definitional equations where output quantities are defined in terms of themselves, and no load-bearing self-citations or uniqueness theorems invoked from prior author work. The central claims about geometric consistency and coherent 3D Gaussians are presented as engineering outcomes of the proposed modules rather than tautological restatements of the input decomposition or network outputs. The method is therefore self-contained as a new technical pipeline whose performance assertions stand or fall on external validation rather than internal redefinition.
Axiom & Free-Parameter Ledger
invented entities (1)
-
training-free depth-injection module
no independent evidence
Reference graph
Works this paper leans on
- [1]
- [2]
- [3]
- [4]
-
[5]
Tianxing Chen et al.RoboTwin 2.0: A Scalable Data Generator and Benchmark with Strong Domain Ran- domization for Robust Bimanual Robotic Manipula- tion. 2025. arXiv:2506 . 18088 [cs.RO].URL: https://arxiv.org/abs/2506.18088
work page internal anchor Pith review arXiv 2025
- [6]
-
[7]
Chenghao Yin et al.Genie Sim 3.0 : A High-Fidelity Comprehensive Simulation Platform for Humanoid Robot. 2026. arXiv:2601.02078 [cs.RO].URL: https://arxiv.org/abs/2601.02078
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[8]
3D Gaussian Splatting for Real- Time Radiance Field Rendering
Bernhard Kerbl et al. “3D Gaussian Splatting for Real- Time Radiance Field Rendering”. In:ACM Transac- tions on Graphics42.4 (July 2023).URL:https : / / repo - sam . inria . fr / fungraph / 3d - gaussian-splatting/
2023
- [9]
- [10]
- [11]
- [12]
-
[13]
pixelSplat: 3D Gaussian Splats from Image Pairs for Scalable Generalizable 3D Re- construction
David Charatan et al. “pixelSplat: 3D Gaussian Splats from Image Pairs for Scalable Generalizable 3D Re- construction”. In:CVPR. 2024
2024
-
[14]
DepthSplat: Connecting Gaussian Splatting and Depth
Haofei Xu et al. “DepthSplat: Connecting Gaussian Splatting and Depth”. In:CVPR. 2025
2025
-
[15]
Anysplat: Feed-forward 3d gaussian splatting from unconstrained views
Lihan Jiang et al. “Anysplat: Feed-forward 3d gaussian splatting from unconstrained views”. In:ACM Trans- actions on Graphics (TOG)44.6 (2025), pp. 1–16
2025
-
[16]
Zicheng Zhang et al.SparseSplat: Towards Applica- ble Feed-Forward 3D Gaussian Splatting with Pixel- Unaligned Prediction. 2026. arXiv:2604 . 03069 [cs.CV].URL:https : / / arxiv . org / abs / 2604.03069
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[17]
Sharp monocular view synthesis in less than a second.arXiv preprint arXiv:2512.10685, 2025
Lars Mescheder et al. “Sharp Monocular View Synthe- sis in Less Than a Second”. In: 2025.URL:https: //arxiv.org/abs/2512.10685
-
[18]
PanSplat: 4K Panorama Synthesis with Feed-Forward Gaussian Splatting
Cheng Zhang et al. “PanSplat: 4K Panorama Synthesis with Feed-Forward Gaussian Splatting”. In:Proceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2025
2025
-
[19]
Jiahui Ren et al. “PanoSplatt3R: Leveraging Per- spective Pretraining for Generalized Unposed Wide- Baseline Panorama Reconstruction”. In:arXiv preprint arXiv:2507.21960(2025)
- [20]
- [21]
- [22]
- [23]
-
[24]
V oxelsplat: Dynamic gaussian splat- ting as an effective loss for occupancy and flow prediction
Ziyue Zhu et al. “V oxelsplat: Dynamic gaussian splat- ting as an effective loss for occupancy and flow prediction”. In:Proceedings of the Computer Vision and Pattern Recognition Conference. 2025, pp. 6761– 6771
2025
-
[25]
Depth Pro: Sharp Monocular Metric Depth in Less Than a Second
Aleksei Bochkovskii et al. “Depth Pro: Sharp Monoc- ular Metric Depth in Less Than a Second”. In:Interna- tional Conference on Learning Representations. 2025. URL:https://arxiv.org/abs/2410.02073
work page internal anchor Pith review arXiv 2025
-
[26]
Vision Transformers for Dense Prediction
René Ranftl, Alexey Bochkovskiy, and Vladlen Koltun. “Vision Transformers for Dense Prediction”. In:ArXiv preprint(2021). APPENDIX Implementation and CLI options are documented in the Genie Sim World codebase. The open Genie Sim repository describes the full simulation platform, synthetic data, and related tooling; cite or link it when positioning this wo...
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.