Multimodal Anomaly Detection for Human-Robot Interaction
Pith reviewed 2026-05-10 17:17 UTC · model grok-4.3
The pith
Reconstruction on vision feature vectors detects anomalies in human-robot tasks, and adding sensor data plus scene graphs improves performance further.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
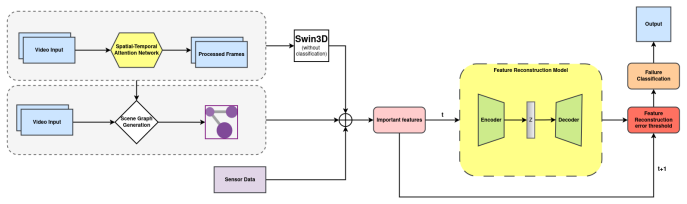
MADRI first transforms video streams into semantically meaningful feature vectors before performing reconstruction-based anomaly detection. It augments these visual feature vectors with the robot's internal sensors' readings and a Scene Graph to capture both external anomalies in the visual environment and internal failures within the robot itself. Experimental results on a custom dataset of normal and anomalous pick-and-place runs demonstrate that reconstruction on vision-based feature vectors alone is effective for detecting anomalies, while incorporating other modalities further improves detection performance.
What carries the argument
MADRI, the framework that performs reconstruction-based anomaly detection on multimodal feature vectors derived from vision, robot sensors, and scene graphs.
If this is right
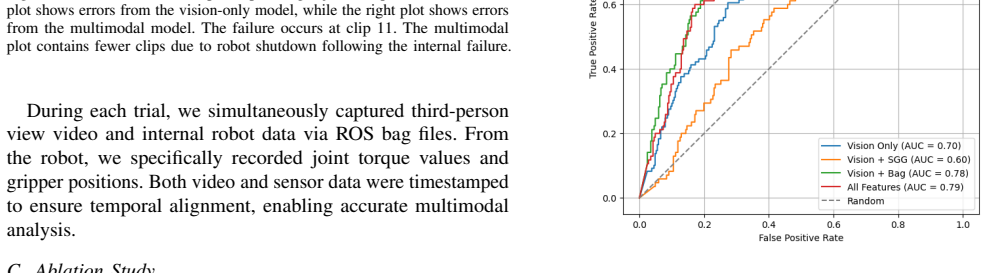
- Reconstruction using only vision-derived feature vectors already identifies anomalies effectively in pick-and-place operations.
- Augmenting vision features with internal sensor readings and scene graph data raises overall detection performance.
- The multimodal approach distinguishes external visual deviations from internal robot failures.
- The method enables timely responses to unexpected events during human-robot collaboration.
Where Pith is reading between the lines
- The same feature-vector reconstruction pipeline might transfer to other collaborative tasks if the underlying feature extractor remains stable across domains.
- Reliance on reconstruction error rather than explicit anomaly labels could reduce the data collection burden for training safety monitors.
- Embedding the detector in a closed-loop controller would let a robot halt or replan immediately upon high reconstruction error.
Load-bearing premise
The custom dataset of normal and anomalous pick-and-place runs sufficiently represents the variety of real-world human-robot interaction scenarios and anomaly types.
What would settle it
Testing the trained model on a different robotic task such as assembly or navigation that introduces anomaly types absent from the custom pick-and-place dataset, then measuring whether detection rates drop sharply.
Figures

read the original abstract
Ensuring safety and reliability in human-robot interaction (HRI) requires the timely detection of unexpected events that could lead to system failures or unsafe behaviours. Anomaly detection thus plays a critical role in enabling robots to recognize and respond to deviations from normal operation during collaborative tasks. While reconstruction models have been actively explored in HRI, approaches that operate directly on feature vectors remain largely unexplored. In this work, we propose MADRI, a framework that first transforms video streams into semantically meaningful feature vectors before performing reconstruction-based anomaly detection. Additionally, we augment these visual feature vectors with the robot's internal sensors' readings and a Scene Graph, enabling the model to capture both external anomalies in the visual environment and internal failures within the robot itself. To evaluate our approach, we collected a custom dataset consisting of a simple pick-and-place robotic task under normal and anomalous conditions. Experimental results demonstrate that reconstruction on vision-based feature vectors alone is effective for detecting anomalies, while incorporating other modalities further improves detection performance, highlighting the benefits of multimodal feature reconstruction for robust anomaly detection in human-robot collaboration.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces MADRI, a framework for anomaly detection in human-robot interaction that converts video streams into semantically meaningful feature vectors and performs reconstruction-based detection. It augments these visual features with robot internal sensor readings and a Scene Graph to capture both external visual anomalies and internal robot failures. The approach is evaluated on a custom dataset of normal and anomalous pick-and-place runs, with the central claim that vision-only reconstruction is effective and that adding other modalities further improves detection performance.
Significance. If the quantitative results hold beyond the reported setup, the work offers a practical multimodal reconstruction approach that could enhance safety in collaborative robotics by detecting deviations without relying solely on raw sensor thresholds. The framework design and custom dataset collection are positive contributions, but the narrow task scope limits broader claims about robustness in real-world HRI.
major comments (2)
- [§4] §4 (Experiments): The evaluation relies exclusively on a single controlled pick-and-place task with a finite set of induced anomalies. This setup does not address whether the reported gains from multimodal augmentation (vision + sensors + Scene Graph) generalize to continuous environmental changes, sensor drift, or multi-step collaborative failures, making the central claim about improved detection performance load-bearing on an untested assumption of dataset representativeness.
- [§3 and §4] §3 (Method) and §4: No explicit definition of the anomaly threshold on reconstruction error, no baseline comparisons (e.g., to standard autoencoders or one-class SVMs on the same features), and no error bars or statistical significance tests are provided for the claimed performance improvements, preventing assessment of whether multimodal inputs yield reliable gains rather than dataset-specific artifacts.
minor comments (2)
- [Abstract] The abstract would be strengthened by including at least one key quantitative metric (e.g., AUC or F1-score) and a brief statement of the anomaly definition to allow readers to gauge the strength of the empirical claims without reading the full text.
- [§3] Notation for feature vectors and reconstruction loss should be introduced consistently in §3 and used uniformly in figures and tables to improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment point by point below, indicating the specific revisions we will incorporate.
read point-by-point responses
-
Referee: [§4] §4 (Experiments): The evaluation relies exclusively on a single controlled pick-and-place task with a finite set of induced anomalies. This setup does not address whether the reported gains from multimodal augmentation (vision + sensors + Scene Graph) generalize to continuous environmental changes, sensor drift, or multi-step collaborative failures, making the central claim about improved detection performance load-bearing on an untested assumption of dataset representativeness.
Authors: We acknowledge that the evaluation is confined to a single controlled pick-and-place task with a finite set of induced anomalies. This setup was deliberately chosen to enable systematic, reproducible isolation of the contributions from each modality while controlling for confounding factors. We agree that this does not demonstrate generalization to continuous environmental changes, sensor drift, or multi-step collaborative failures. In the revised manuscript we will add an explicit limitations subsection to Section 4 that states the scope of the current dataset, clarifies the assumptions underlying the central claim, and moderates the language in the abstract and conclusion to avoid overgeneralization. We will also outline concrete directions for future work on more diverse scenarios. revision: yes
-
Referee: [§3 and §4] §3 (Method) and §4: No explicit definition of the anomaly threshold on reconstruction error, no baseline comparisons (e.g., to standard autoencoders or one-class SVMs on the same features), and no error bars or statistical significance tests are provided for the claimed performance improvements, preventing assessment of whether multimodal inputs yield reliable gains rather than dataset-specific artifacts.
Authors: We thank the referee for highlighting these omissions. The anomaly threshold was set by computing the reconstruction-error distribution on the normal training set and selecting the 95th percentile as the decision boundary; we will state this definition explicitly in the revised Section 3. Although we compared multimodal variants internally, we did not report classical baselines such as standard autoencoders or one-class SVMs applied to the same feature vectors. We will add these baselines to the experiments in the revised Section 4. In addition, we will report performance with error bars obtained from multiple random seeds and include statistical significance tests (paired t-tests) to substantiate the observed gains. These changes will allow readers to assess the reliability of the multimodal improvements. revision: yes
Circularity Check
No derivation chain or self-referential predictions present
full rationale
The paper describes an empirical framework (MADRI) for multimodal anomaly detection via feature-vector reconstruction, evaluated on a custom pick-and-place dataset with held-out anomalous runs. No equations, mathematical derivations, fitted parameters renamed as predictions, or uniqueness theorems appear in the provided text. The central claims rest on experimental metrics comparing reconstruction errors for normal versus anomalous cases and gains from added modalities, which are independent of any self-definition or self-citation load-bearing step. The work is self-contained as a data-driven evaluation rather than a closed logical loop.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Human–robot interaction: a survey,
M. A. Goodrich, A. C. Schultzet al., “Human–robot interaction: a survey,” F oundations and trends® in human–computer interaction, vol. 1, no. 3, pp. 203–275, 2008
work page 2008
-
[2]
V . Chandola, A. Banerjee, and V . Kumar, “Anomaly detection: A survey,” ACM computing surveys (CSUR), vol. 41, no. 3, pp. 1–58, 2009
work page 2009
-
[3]
D. Gong, L. Liu, V . Le, B. Saha, M. R. Mansour, S. Venkatesh, and A. v. d. Hengel, “Memorizing normality to detect anomaly: Memory-augmented deep autoencoder for unsupervised anomaly detection,” inProceedings of the IEEE/CVF international conference on computer vision, 2019, pp. 1705–1714
work page 2019
-
[4]
In European Conference on Computer Vision, pages 413–430
Z. Liu, J. Ning, Y . Cao, Y . Wei, Z. Zhang, S. Lin, and H. Hu, “Video swin transformer,” 2021. [Online]. Available: https://arxiv.org/abs/2106.13230
-
[5]
PyTorch: An Imperative Style, High-Performance Deep Learning Library
A. Paszke, S. Gross, F. Massa, A. Lerer, J. Bradbury, G. Chanan, T. Killeen, Z. Lin, N. Gimelshein, L. Antiga, A. Desmaison, A. K ¨opf, E. Yang, Z. DeVito, M. Raison, A. Tejani, S. Chilamkurthy, B. Steiner, L. Fang, J. Bai, and S. Chintala, “Pytorch: An imperative style, high-performance deep learning library,” 2019. [Online]. Available: https://arxiv.org...
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[6]
Quo vadis, action recognition? a new model and the kinetics dataset,
J. Carreira and A. Zisserman, “Quo vadis, action recognition? a new model and the kinetics dataset,” inproceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017, pp. 6299–6308
work page 2017
-
[7]
Oed: Towards one-stage end-to-end dynamic scene graph generation,
G. Wang, Z. Li, Q. Chen, and Y . Liu, “Oed: Towards one-stage end-to-end dynamic scene graph generation,” 2024. [Online]. Available: https://arxiv.org/abs/2405.16925
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.