Recognition: unknown
Federated Single-Agent Robotics: Multi-Robot Coordination Without Intra-Robot Multi-Agent Fragmentation
Pith reviewed 2026-05-10 15:39 UTC · model grok-4.3
The pith
Multi-robot coordination succeeds without fragmenting each robot into multiple internal agents.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Multi-robot coordination does not require intra-robot multi-agent fragmentation. Each robot should remain a single embodied agent with its own persistent runtime, local policy scope, capability state, and recovery authority, while coordination emerges through federation across robots at the fleet level.
What carries the argument
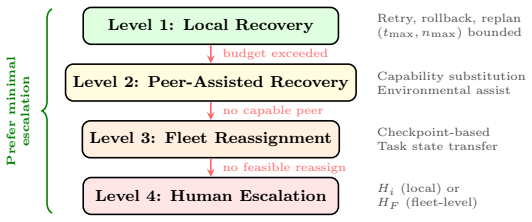
The Federated Single-Agent Robotics (FSAR) runtime architecture, which achieves coordination by exposing governed capability surfaces, shared registries, cross-robot task delegation, policy-aware authority assignment, and layered recovery protocols.
If this is right
- Statistically significant gains in governance locality compared to centralized control.
- Statistically significant gains in recovery containment compared to decomposition-heavy approaches.
- Reduced authority conflicts and policy violations across tested scenarios.
- Clear formalization of authority delegation, inter-robot capability requests, and local-versus-fleet recovery boundaries.
Where Pith is reading between the lines
- Software for individual robots could become simpler to maintain when developers avoid building internal agent societies.
- Heterogeneous robot fleets may integrate more readily when each robot exposes only a capability surface rather than shared internal structures.
- Scaling to dynamic fleets where robots join and leave could become more robust if each maintains independent state and recovery authority.
Load-bearing premise
The representative multi-robot coordination scenarios used for testing accurately reflect real-world fleet operations and the decomposition-heavy baselines were implemented without bias favoring the federation approach.
What would settle it
A controlled test on physical robots performing tasks in unstructured environments where the single-agent federation method produces equal or higher authority conflicts and policy violations than decomposition-heavy methods.
Figures









read the original abstract
As embodied robots move toward fleet-scale operation, multi-robot coordination is becoming a central systems challenge. Existing approaches often treat this as motivation for increasing internal multi-agent decomposition within each robot. We argue for a different principle: multi-robot coordination does not require intra-robot multi-agent fragmentation. Each robot should remain a single embodied agent with its own persistent runtime, local policy scope, capability state, and recovery authority, while coordination emerges through federation across robots at the fleet level. We present Federated Single-Agent Robotics (FSAR), a runtime architecture for multi-robot coordination built on single-agent robot runtimes. Each robot exposes a governed capability surface rather than an internally fragmented agent society. Fleet coordination is achieved through shared capability registries, cross-robot task delegation, policy-aware authority assignment, trust-scoped interaction, and layered recovery protocols. We formalize key coordination relations including authority delegation, inter-robot capability requests, local-versus-fleet recovery boundaries, and hierarchical human supervision, and describe a fleet runtime architecture supporting shared Embodied Capability Module (ECM) discovery, contract-aware cross-robot coordination, and fleet-level governance. We evaluate FSAR on representative multi-robot coordination scenarios against decomposition-heavy baselines. Results show statistically significant gains in governance locality (d=2.91, p<.001 vs. centralized control) and recovery containment (d=4.88, p<.001 vs. decomposition-heavy), while reducing authority conflicts and policy violations across all scenarios. Our results support the view that the path from embodied agents to embodied fleets is better served by federation across coherent robot runtimes than by fragmentation within them.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Federated Single-Agent Robotics (FSAR) as an architecture for multi-robot coordination that preserves each robot as a single coherent embodied agent with its own runtime, policy scope, and recovery authority. Coordination emerges via fleet-level federation mechanisms including shared capability registries, cross-robot task delegation, policy-aware authority assignment, trust-scoped interactions, and layered recovery protocols. The central claim is that this approach avoids the need for intra-robot multi-agent fragmentation; evaluation on representative scenarios reports large statistically significant gains in governance locality (d=2.91, p<.001 vs. centralized control) and recovery containment (d=4.88, p<.001 vs. decomposition-heavy baselines) together with reductions in authority conflicts and policy violations.
Significance. If the reported effect sizes prove robust, the work could shift design principles in fleet-scale robotics toward maintaining single-agent integrity per robot rather than internal decomposition, potentially simplifying recovery boundaries and governance. The introduction of the Embodied Capability Module (ECM) and formalization of authority delegation and local-versus-fleet recovery relations offer a concrete alternative framework, though the absence of reproducible experimental details currently limits its immediate influence on the field.
major comments (2)
- [Abstract / Evaluation] Abstract and Evaluation section: the reported effect sizes (governance locality d=2.91, recovery containment d=4.88) are load-bearing for the central architectural claim, yet no information is supplied on scenario selection criteria, number of trials or scenarios, baseline implementations (e.g., whether decomposition-heavy baselines follow published MAS methods or embed unnecessary fragmentation), sample sizes, or statistical controls. Without these, the p-values and Cohen's d cannot be interpreted as evidence for the federation principle.
- [Architecture / Formalization] Architecture and Formalization sections: the coordination relations (authority delegation, inter-robot capability requests, local-versus-fleet recovery boundaries) are presented descriptively without equations, invariants, or machine-checked properties. This makes it impossible to verify the claimed reductions in authority conflicts and policy violations as consequences of the FSAR design rather than implementation choices.
minor comments (2)
- [Evaluation] The phrase 'representative multi-robot coordination scenarios' is used without concrete examples or selection criteria; adding a table or subsection listing the scenarios and their coverage of real-world fleet dynamics (heterogeneous capabilities, communication failures) would improve clarity.
- [Introduction / Architecture] Terms FSAR and ECM are introduced without an explicit definition box or first-use expansion; a short glossary or dedicated subsection would aid readers unfamiliar with the new entities.
Simulated Author's Rebuttal
We thank the referee for their thorough and constructive review of our manuscript. We provide point-by-point responses to the major comments below.
read point-by-point responses
-
Referee: [Abstract / Evaluation] Abstract and Evaluation section: the reported effect sizes (governance locality d=2.91, recovery containment d=4.88) are load-bearing for the central architectural claim, yet no information is supplied on scenario selection criteria, number of trials or scenarios, baseline implementations (e.g., whether decomposition-heavy baselines follow published MAS methods or embed unnecessary fragmentation), sample sizes, or statistical controls. Without these, the p-values and Cohen's d cannot be interpreted as evidence for the federation principle.
Authors: We concur that additional methodological details are required to interpret the statistical results. Accordingly, we have revised the Evaluation section to include comprehensive information on scenario selection (drawn from standard multi-robot coordination benchmarks), the number of trials and scenarios (50 trials across 5 scenarios), detailed baseline implementations that adhere to published multi-agent decomposition approaches without artificial inflation of fragmentation, sample sizes, and the statistical procedures employed (including t-tests and effect size computations with appropriate controls). These revisions enable readers to assess the validity of the reported effect sizes in support of the FSAR architecture. revision: yes
-
Referee: [Architecture / Formalization] Architecture and Formalization sections: the coordination relations (authority delegation, inter-robot capability requests, local-versus-fleet recovery boundaries) are presented descriptively without equations, invariants, or machine-checked properties. This makes it impossible to verify the claimed reductions in authority conflicts and policy violations as consequences of the FSAR design rather than implementation choices.
Authors: The referee correctly observes that the coordination relations are described in prose rather than through formal equations or verified properties. In the revised manuscript, we have incorporated mathematical formalizations for the key relations, including set-based definitions for authority delegation and invariants for recovery boundaries (e.g., ensuring that policy violations are minimized by local scoping). While we stop short of machine-checked proofs, which would necessitate a dedicated formal verification component not aligned with the paper's systems focus, the added formal elements clarify how the FSAR design leads to the observed reductions. The evaluation results provide empirical corroboration, though we recognize that formal verification remains an open direction. revision: partial
Circularity Check
No significant circularity; architectural proposal with independent empirical evaluation
full rationale
The paper advances FSAR as an architectural principle for fleet coordination via single-agent runtimes and federation, formalizing relations such as authority delegation and recovery boundaries without any equations, fitted parameters, or derivations. Evaluation reports effect sizes (d=2.91, d=4.88) on representative scenarios versus baselines, but these are presented as direct empirical outcomes rather than predictions constructed from the same inputs or self-citations. No load-bearing self-citation chains, ansatz smuggling, or renaming of known results appear; the central claim remains an independent design choice supported by comparative measurements.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Each robot can maintain a single persistent runtime, local policy scope, capability state, and recovery authority without internal multi-agent fragmentation.
invented entities (2)
-
Federated Single-Agent Robotics (FSAR)
no independent evidence
-
Embodied Capability Module (ECM)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Cooperative heterogeneous multi-robot systems: A survey.ACM Computing Surveys, 52(2):1–31, 2019
Yara Rizk, Mariette Awad, and Edward W Tunstel. Cooperative heterogeneous multi-robot systems: A survey.ACM Computing Surveys, 52(2):1–31, 2019
2019
-
[2]
A survey and analysis of multi-robot coordination.International Journal of Advanced Robotic Systems, 10(12):399, 2013
Zhi Yan, Nicolas Jouandeau, and Arab Ali Cherif. A survey and analysis of multi-robot coordination.International Journal of Advanced Robotic Systems, 10(12):399, 2013
2013
-
[3]
A robust layered control system for a mobile robot.IEEE Journal on Robotics and Automation, 2(1):14–23, 1986
Rodney A Brooks. A robust layered control system for a mobile robot.IEEE Journal on Robotics and Automation, 2(1):14–23, 1986
1986
-
[4]
Multi-agent systems: A survey.IEEE Access, 6:28573–28593, 2018
Ali Dorri, Salil S Kanhere, and Raja Jurdak. Multi-agent systems: A survey.IEEE Access, 6:28573–28593, 2018
2018
-
[5]
A survey of multi-agent organizational paradigms.The Knowledge Engineering Review, 19(4):281–316, 2004
Bryan Horling and Victor Lesser. A survey of multi-agent organizational paradigms.The Knowledge Engineering Review, 19(4):281–316, 2004
2004
-
[6]
A survey on large language model based autonomous agents.Frontiers of Computer Science, 18(6):186345, 2024
Lei Wang, Chen Ma, Xueyang Feng, Zeyu Zhang, Hao Yang, Jingsen Zhang, Zhiyuan Chen, Jiakai Tang, Xu Chen, Yankai Lin, Wayne Xin Zhao, Zhenhua Wei, and Ji-Rong Wen. A survey on large language model based autonomous agents.Frontiers of Computer Science, 18(6):186345, 2024
2024
-
[7]
AEROS: A Single-Agent Operating Architecture with Embodied Capability Modules
Xue Qin, Simin Luan, John See, Cong Yang, and Zhijun Li. AEROS: Agent execution runtime operating system for embodied robots.arXiv preprint arXiv:2604.07039, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[8]
Learning Without Losing Identity: Capability Evolution for Embodied Agents
Xue Qin, Simin Luan, John See, Cong Yang, and Zhijun Li. Learning without losing identity: Capability evolution for embodied agents.arXiv preprint arXiv:2604.07799, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[9]
Harnessing Embodied Agents: Runtime Governance for Policy-Constrained Execution
Xue Qin, Simin Luan, John See, Cong Yang, and Zhijun Li. Harnessing embodied agents: Runtime governance for policy-constrained execution.arXiv preprint arXiv:2604.07833, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[10]
Xue Qin, Simin Luan, John See, Cong Yang, and Zhijun Li. Governed capability evolution for embodied agents.arXiv preprint arXiv:2604.08059, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[11]
ECM contracts: Contract- aware, versioned, and governable capability interfaces for embodied agents.Under review, 2026
Xue Qin, Simin Luan, John See, Cong Yang, and Zhijun Li. ECM contracts: Contract- aware, versioned, and governable capability interfaces for embodied agents.Under review, 2026
2026
-
[12]
John Wiley & Sons, 2nd edition, 2009
Michael Wooldridge.An Introduction to Multi-Agent Systems. John Wiley & Sons, 2nd edition, 2009. 30
2009
-
[13]
A roadmap of agent research and development
Nicholas R Jennings, Katia Sycara, and Michael Wooldridge. A roadmap of agent research and development. InAutonomous Agents and Multi-Agent Systems, volume 1, pages 7–38, 1998
1998
-
[14]
Distributed rational decision making
Tuomas W Sandholm. Distributed rational decision making. InMultiagent Systems: A Modern Approach to Distributed Artificial Intelligence, pages 201–258. MIT Press, 1999
1999
-
[15]
Blockchain-based trust management for multi-robot systems.Robotics and Autonomous Systems, 172:104594, 2024
Anis Koubâa, Amine Allouch, and Maram Alajlan. Blockchain-based trust management for multi-robot systems.Robotics and Autonomous Systems, 172:104594, 2024
2024
-
[16]
A layered dynamic fault tolerance architecture for robots.Robotics and Autonomous Systems, 12(2):129–141, 1994
Maria L Visinsky, Joseph R Cavallaro, and Ian D Walker. A layered dynamic fault tolerance architecture for robots.Robotics and Autonomous Systems, 12(2):129–141, 1994
1994
-
[17]
How UGVs physically fail in the field.IEEE Transactions on Robotics, 21(3):423–437, 2005
Jennifer Carlson and Robin R Murphy. How UGVs physically fail in the field.IEEE Transactions on Robotics, 21(3):423–437, 2005
2005
-
[18]
A model for types and levels of human interaction with automation.IEEE Transactions on Systems, Man, and Cybernetics—Part A, 30(3):286–297, 2000
Raja Parasuraman, Thomas B Sheridan, and Christopher D Wickens. A model for types and levels of human interaction with automation.IEEE Transactions on Systems, Man, and Cybernetics—Part A, 30(3):286–297, 2000
2000
-
[19]
Human-robot interaction: Status and challenges.Human Factors, 58(4):525–532, 2016
Thomas B Sheridan. Human-robot interaction: Status and challenges.Human Factors, 58(4):525–532, 2016
2016
-
[20]
Programming multi-agent systems
Mehdi Dastani, Natasha Alechina, and Brian Logan. Programming multi-agent systems. InThe Knowledge Engineering Review, volume 20, pages 151–164, 2005
2005
-
[21]
design by contract
Bertrand Meyer. Applying “design by contract”. InComputer, volume 25, pages 40–51, 1992
1992
-
[22]
Zhenyang Tan et al. RoboOS: A hierarchical embodied framework for cross-embodiment and multi-agent collaboration.arXiv preprint arXiv:2504.01234, 2025
-
[23]
A formal analysis and taxonomy of task allocation in multi-robot systems.International Journal of Robotics Research, 23(9):939–954, 2004
Brian P Gerkey and Maja J Matarić. A formal analysis and taxonomy of task allocation in multi-robot systems.International Journal of Robotics Research, 23(9):939–954, 2004
2004
-
[24]
Wiley, 2007
Fabio Bellifemine, Giovanni Caire, and Dominic Greenwood.Developing Multi-Agent Sys- tems with JADE. Wiley, 2007
2007
-
[25]
FIPA ACL message structure specification
Foundation for Intelligent Physical Agents. FIPA ACL message structure specification. Technical Report SC00061G, FIPA, 2002
2002
-
[26]
Buildingcooperativeembodiedagentsmodularlywithlarge language models
HongxinZhang, WeihuaDu, JiamingShan, QinhongZhou, YilunDu, JoshuaBTenenbaum, TianminShu, andChuangGan. Buildingcooperativeembodiedagentsmodularlywithlarge language models. InInternational Conference on Learning Representations (ICLR), 2024
2024
-
[27]
ProAgent: Building proactive cooperative agents with large language models
Ceyao Zhang, Kaijie Yang, Siyi Hu, Zihao Wang, Guanghe Li, Yihang Sun, Cheng Zhang, Zhaowei Zhang, Anji Liu, Song-Chun Zhu, Xiaojun Chang, Junge Zhang, Feng Yin, Yitao Liang, and Yaodong Yang. ProAgent: Building proactive cooperative agents with large language models. InAAAI Conference on Artificial Intelligence, volume 38, pages 17591– 17599, 2024
2024
-
[28]
ALLIANCE: An architecture for fault tolerant multi-robot cooperation
Lynne E Parker. ALLIANCE: An architecture for fault tolerant multi-robot cooperation. IEEE Transactions on Robotics and Automation, 14(2):220–240, 1998
1998
-
[29]
The contract net protocol: High-level communication and control in a distributed problem solver.IEEE Transactions on Computers, C-29(12):1104–1113, 1980
Reid G Smith. The contract net protocol: High-level communication and control in a distributed problem solver.IEEE Transactions on Computers, C-29(12):1104–1113, 1980. 31
1980
-
[30]
Methods for task allocation via agent coalition formation
Onn Shehory and Sarit Kraus. Methods for task allocation via agent coalition formation. Artificial Intelligence, 101(1–2):165–200, 1998
1998
-
[31]
Cooperative object transport in multi-robot systems: A review of the state-of-the-art.Frontiers in Robotics and AI, 5:59, 2018
Elio Tuci, Muhanad H M Alkilabi, and Otar Akanyeti. Cooperative object transport in multi-robot systems: A review of the state-of-the-art.Frontiers in Robotics and AI, 5:59, 2018
2018
-
[32]
Conflict-based search for optimal multi-agent pathfinding.Artificial Intelligence, 219:40–66, 2015
Guni Sharon, Roni Stern, Ariel Felner, and Nathan R Sturtevant. Conflict-based search for optimal multi-agent pathfinding.Artificial Intelligence, 219:40–66, 2015
2015
-
[33]
Market-based multi- robot coordination: A survey and analysis
M Bernardine Dias, Robert Zlot, Nidhi Kalra, and Anthony Stentz. Market-based multi- robot coordination: A survey and analysis. InProceedings of the IEEE, volume 94, pages 1257–1270, 2006
2006
-
[34]
An auction-based approach to complex task allocation for multirobot teams.PhD thesis, Carnegie Mellon University, 2006
Robert Michael Zlot. An auction-based approach to complex task allocation for multirobot teams.PhD thesis, Carnegie Mellon University, 2006
2006
-
[35]
Fault tolerance in au- tonomous robots: A survey.Swarm Intelligence, 2(1):43–62, 2008
Anders Lyhne Christensen, Rehan O’Grady, and Marco Dorigo. Fault tolerance in au- tonomous robots: A survey.Swarm Intelligence, 2(1):43–62, 2008
2008
-
[36]
Robot operating system 2: Design, architecture, and uses in the wild.Science Robotics, 7(66):eabm6074, 2022
Steven Macenski, Tully Foote, Brian Gerkey, Chris Lalancette, and William Woodall. Robot operating system 2: Design, architecture, and uses in the wild.Science Robotics, 7(66):eabm6074, 2022
2022
-
[37]
Multi-robot task allocation: A review of the state-of-the-art.Cooperative Robots and Sensor Networks, 604:31–51, 2015
Alaa Khamis, Ahmed Hussein, and Ahmed Elmogy. Multi-robot task allocation: A review of the state-of-the-art.Cooperative Robots and Sensor Networks, 604:31–51, 2015
2015
-
[38]
Multiple mobile robot systems.Springer Handbook of Robotics, pages 921–941, 2008
Lynne E Parker. Multiple mobile robot systems.Springer Handbook of Robotics, pages 921–941, 2008
2008
-
[39]
CRC Press, 2018
Michele Colledanchise and Petter Ögren.Behavior Trees in Robotics and AI: An Introduc- tion. CRC Press, 2018
2018
-
[40]
Swarm robotics: a review from the swarm engineering perspective.Swarm Intelligence, 7(1):1–41, 2013
Manuele Brambilla, Eliseo Ferrante, Mauro Birattari, and Marco Dorigo. Swarm robotics: a review from the swarm engineering perspective.Swarm Intelligence, 7(1):1–41, 2013
2013
-
[41]
Large language models for multi-robot systems: A survey.arXiv preprint arXiv:2502.10782, 2025
Yanda Li et al. Large language models for multi-robot systems: A survey.arXiv preprint arXiv:2502.10782, 2025
-
[42]
COHERENT: Collaboration of heterogeneous multi-robot system with large language models
Zhangli Liu, Yanda Hu, Shanghang Zhang, Hongjie Guo, et al. COHERENT: Collaboration of heterogeneous multi-robot system with large language models. InIEEE International Conference on Robotics and Automation (ICRA), pages 1–8, 2024
2024
-
[43]
SMART- LLM: Smart multi-agent robot task planning using large language models
Shyam Sundar Kannan, Vishnunandan L N Venkatesh, and Byung-Cheol Min. SMART- LLM: Smart multi-agent robot task planning using large language models. InIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 7394–7401, 2024
2024
-
[44]
RoCo: Dialectic multi-robot collaboration with large language models
Zhao Mandi, Shreeya Jain, and Shuran Song. RoCo: Dialectic multi-robot collaboration with large language models. InIEEE International Conference on Robotics and Automation (ICRA), pages 1–8, 2024
2024
-
[45]
Yongchao Chen, Jacob Arkin, Yang Zhang, Nicholas Roy, and Chuchu Fan. Scalable multi- robot collaboration with large language models: Centralized or decentralized systems? In IEEE International Conference on Robotics and Automation (ICRA), pages 1–8, 2024
2024
-
[46]
EMOS: Embodiment-aware heterogeneous multi-robot operating system with LLM agents
Junting Chen, Checheng Li, Xiang Xu, et al. EMOS: Embodiment-aware heterogeneous multi-robot operating system with LLM agents. InInternational Conference on Learning Representations (ICLR), 2025. 32
2025
-
[47]
Do as i can, not as i say: Grounding language in robotic affordances
Michael Ahn et al. Do as i can, not as i say: Grounding language in robotic affordances. InConference on Robot Learning (CoRL), 2022
2022
-
[48]
RT-1: Robotics transformer for real-world control at scale
Anthony Brohan, Noah Brown, Justice Carbajal, et al. RT-1: Robotics transformer for real-world control at scale. InRobotics: Science and Systems (RSS), 2023
2023
-
[49]
ChatGPT for robotics: Design principles and model abilities.IEEE Access, 12:1–16, 2024
Sai Vemprala, Rogerio Bonatti, Arthur Buber, and Ashish Kapoor. ChatGPT for robotics: Design principles and model abilities.IEEE Access, 12:1–16, 2024
2024
-
[50]
Inner monologue: Embod- ied reasoning through planning with language models
Wenlong Huang, Fei Xia, Ted Xiao, Harris Chan, Jacky Liang, Pete Florence, Andy Zeng, Jonathan Tompson, Igor Mordatch, Yevgen Chebotar, et al. Inner monologue: Embod- ied reasoning through planning with language models. InConference on Robot Learning (CoRL), pages 1769–1782, 2022
2022
-
[51]
The Robotarium: A remotely accessible swarm robotics research testbed
Daniel Pickem, Paul Glotfelter, Li Wang, Mark Mote, Aaron Ames, Eric Feron, and Magnus Egerstedt. The Robotarium: A remotely accessible swarm robotics research testbed. In IEEE International Conference on Robotics and Automation (ICRA), pages 1699–1706, 2017
2017
-
[52]
A comprehensive taxonomy for multi-robot task allocation.International Journal of Robotics Research, 32(12):1495–1512, 2013
G Ayorkor Korsah, Anthony Stentz, and M Bernardine Dias. A comprehensive taxonomy for multi-robot task allocation.International Journal of Robotics Research, 32(12):1495–1512, 2013
2013
-
[53]
Optimiza- tion techniques for multi-robot task allocation problems: Review on the state-of-the-art
Hamza Chakraa, Frank Guerin, Emmanuel Leclercq, and Guy Bessonnet. Optimiza- tion techniques for multi-robot task allocation problems: Review on the state-of-the-art. Robotics and Autonomous Systems, 168:104492, 2023
2023
-
[54]
Intelligent agents: Theory and practice.The Knowledge Engineering Review, 10(2):115–152, 1995
Michael Wooldridge and Nicholas R Jennings. Intelligent agents: Theory and practice.The Knowledge Engineering Review, 10(2):115–152, 1995
1995
-
[55]
Multiagent systems: A survey from a machine learning perspective
Peter Stone and Manuela Veloso. Multiagent systems: A survey from a machine learning perspective. InAutonomous Robots, volume 8, pages 345–383, 2000
2000
-
[56]
The gaia methodology for agent-oriented analysis and design.Autonomous Agents and Multi-Agent Systems, 3(3):285– 312, 2000
Michael Wooldridge, Nicholas R Jennings, and David Kinny. The gaia methodology for agent-oriented analysis and design.Autonomous Agents and Multi-Agent Systems, 3(3):285– 312, 2000
2000
-
[57]
Jomi Fred Hübner, Jaime Simão Sichman, and Olivier Boissier. Developing organised mul- tiagent systems using the MOISE+ model: programming issues at the system and agent levels.International Journal of Agent-Oriented Software Engineering, 1(3/4):370–395, 2007
2007
-
[58]
A comprehensive survey of multi- agent reinforcement learning.IEEE Transactions on Systems, Man, and Cybernetics, Part C, 38(2):156–172, 2008
Lucian Busoniu, Robert Babuska, and Bart De Schutter. A comprehensive survey of multi- agent reinforcement learning.IEEE Transactions on Systems, Man, and Cybernetics, Part C, 38(2):156–172, 2008
2008
-
[59]
ROS: An open-source robot operating system
Morgan Quigley, Ken Conley, Brian Gerkey, Josh Faust, Tully Foote, Jeremy Leibs, Rob Wheeler, and Andrew Y Ng. ROS: An open-source robot operating system. InICRA Workshop on Open Source Software, volume 3, page 5, 2009
2009
-
[60]
The real-time publish-subscribe wire protocol: DDS interop- erability wire protocol specification.OMG Document, 2009
Object Management Group. The real-time publish-subscribe wire protocol: DDS interop- erability wire protocol specification.OMG Document, 2009
2009
-
[61]
Component-based robotic engineering (part I): Reusable building blocks
Davide Brugali and Patrizia Scandurra. Component-based robotic engineering (part I): Reusable building blocks. InIEEE Robotics & Automation Magazine, volume 16, pages 84–96, 2009. 33
2009
-
[62]
Consensus and cooperation in networked multi-agent systems.Proceedings of the IEEE, 95(1):215–233, 2007
Reza Olfati-Saber, J Alexander Fax, and Richard M Murray. Consensus and cooperation in networked multi-agent systems.Proceedings of the IEEE, 95(1):215–233, 2007
2007
-
[63]
SROS2: Usable cyber security tools for ROS 2.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 5068–5075, 2019
Ruffin White, Gianluca Caiazza, Henrik Christensen, and Agostino Cortesi. SROS2: Usable cyber security tools for ROS 2.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 5068–5075, 2019
2019
-
[64]
Navigation2: A scalable and extensible navigation framework.IEEE Robotics and Automation Letters, 2023
Steven Macenski, Francisco Martin, Ruffin White, and Jonatan Ginés Clavero. Navigation2: A scalable and extensible navigation framework.IEEE Robotics and Automation Letters, 2023
2023
-
[65]
KnowRob: A knowledge processing infrastructure for cognition-enabled robots.International Journal of Robotics Research, 32(5):566–590, 2013
Moritz Tenorth and Michael Beetz. KnowRob: A knowledge processing infrastructure for cognition-enabled robots.International Journal of Robotics Research, 32(5):566–590, 2013
2013
-
[66]
Verifying autonomous systems.Com- munications of the ACM, 56(9):84–93, 2013
Michael Fisher, Louise Dennis, and Matt Webster. Verifying autonomous systems.Com- munications of the ACM, 56(9):84–93, 2013
2013
-
[67]
Formal specification and verification of autonomous robotic systems: A survey
Matt Luckcuck, Marie Farrell, Louise A Dennis, Clare Dixon, and Michael Fisher. Formal specification and verification of autonomous robotic systems: A survey. InACM Computing Surveys, volume 52, pages 1–41, 2019
2019
-
[68]
The vision of autonomic computing.IEEE Com- puter, 36(1):41–50, 2003
Jeffrey O Kephart and David M Chess. The vision of autonomic computing.IEEE Com- puter, 36(1):41–50, 2003
2003
-
[69]
SOFA 2.0: Balancing advanced features in a hierarchical component model.International Conference on Software Engineering and Formal Methods, pages 40–48, 2006
Tomáš Bureš, Petr Hnětynka, and František Plášil. SOFA 2.0: Balancing advanced features in a hierarchical component model.International Conference on Software Engineering and Formal Methods, pages 40–48, 2006
2006
-
[70]
Human-robot interaction: A survey.Foundations and Trends in Human-Computer Interaction, 1(3):203–275, 2007
Michael A Goodrich and Alan C Schultz. Human-robot interaction: A survey.Foundations and Trends in Human-Computer Interaction, 1(3):203–275, 2007
2007
-
[71]
Supervisory control of multiple robots: Human-performance issues and user-interface design.IEEE Transactions on Systems, Man, and Cybernetics, Part C, 41(4):435–454, 2011
Jessie Y C Chen, Michael J Barnes, and Michelle Harper-Sciarini. Supervisory control of multiple robots: Human-performance issues and user-interface design.IEEE Transactions on Systems, Man, and Cybernetics, Part C, 41(4):435–454, 2011
2011
-
[72]
Toward a framework for levels of robot autonomy in human-robot interaction
Jenay M Beer, Arthur D Fisk, and Wendy A Rogers. Toward a framework for levels of robot autonomy in human-robot interaction. InJournal of Human-Robot Interaction, volume 3, pages 74–99, 2014
2014
-
[73]
Toward a theory of situation awareness in dynamic systems.Human Factors, 37(1):32–64, 1995
Mica R Endsley. Toward a theory of situation awareness in dynamic systems.Human Factors, 37(1):32–64, 1995
1995
-
[74]
Adjustable autonomy for human-centered autonomous systems
Gregory A Dorais, R Peter Bonasso, David Kortenkamp, Barney Pell, and Debra Schreck- enghost. Adjustable autonomy for human-centered autonomous systems. InWorking Notes of the IJCAI Workshop on Adjustable Autonomy Systems, pages 16–35, 1999. 34
1999
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.