Recognition: no theorem link
Artificial Intelligence for Modeling and Simulation of Mixed Automated and Human Traffic
Pith reviewed 2026-05-10 15:57 UTC · model grok-4.3
The pith
AI methods for mixed autonomous and human traffic simulation can be organized into a three-family taxonomy to address limitations in existing tools.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
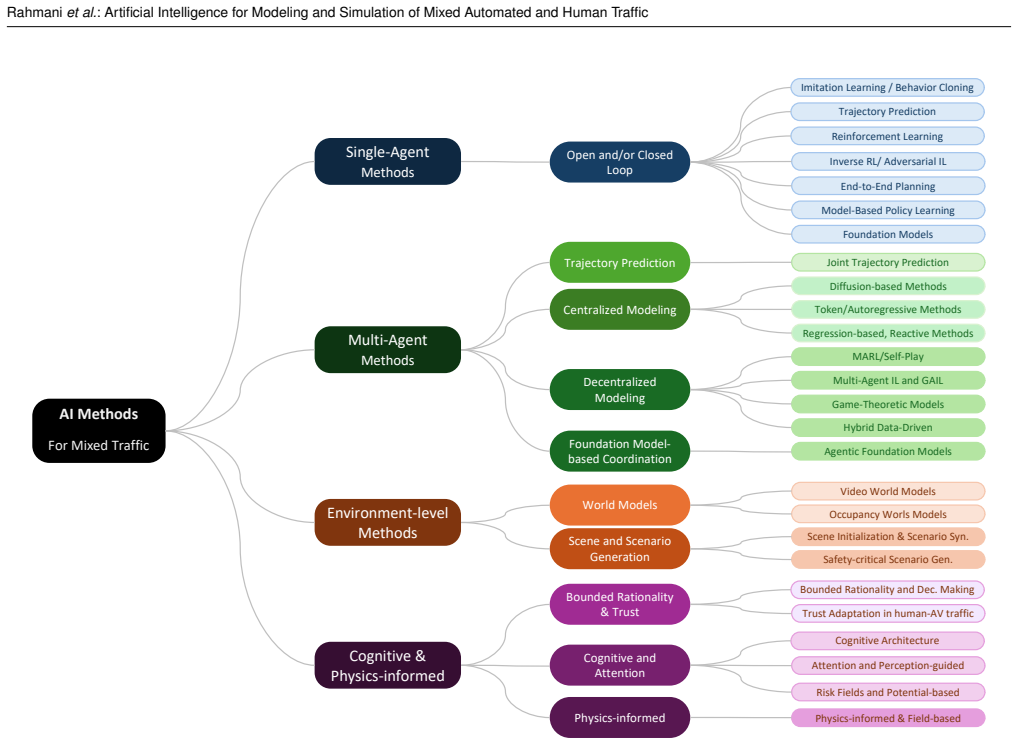
Existing simulation tools for traffic fall short in representing the complexity of mixed automated and human driving behaviors and interactions. To address this, the survey synthesizes AI methods into three families: agent-level behavior models that focus on individual vehicle decisions, environment-level simulation methods that handle broader scene dynamics, and cognitive and physics-informed methods that incorporate human-like reasoning or physical laws. It further examines evaluation protocols, datasets, and tools while outlining steps to bridge the divide between current capabilities and research requirements.
What carries the argument
A taxonomy dividing AI methods for mixed traffic simulation into agent-level behavior models, environment-level simulation methods, and cognitive and physics-informed methods.
If this is right
- Current simulation platforms are shown to lack sufficient realism for testing mixed autonomy systems.
- A chronological view of methods tracks how AI approaches have evolved to handle behavior and interaction modeling.
- Specific directions are outlined for upgrading platforms to meet the demands of mixed traffic research.
- Standardized evaluation protocols and metrics are reviewed to assess simulation quality more consistently.
- The synthesis encourages closer collaboration between traffic engineering and computer science communities.
Where Pith is reading between the lines
- Researchers entering the field could use the taxonomy to quickly locate relevant techniques for their own simulation projects.
- The framework may prompt creation of hybrid models that draw strengths from more than one family to boost overall accuracy.
- Prioritizing new datasets with rich mixed-traffic recordings could directly address one of the gaps the survey identifies.
- Similar taxonomies might be developed for adjacent areas such as pedestrian flow or multi-agent robotics simulations.
Load-bearing premise
The taxonomy comprehensively covers all relevant AI methods in the field without significant omissions based on the surveyed literature.
What would settle it
Discovery of a widely adopted simulation platform that achieves high-fidelity mixed traffic modeling using only non-AI rule-based methods would undermine the need for the proposed taxonomy.
Figures


read the original abstract
Autonomous vehicles (AVs) are now operating on public roads, which makes their testing and validation more critical than ever. Simulation offers a safe and controlled environment for evaluating AV performance in varied conditions. However, existing simulation tools mainly focus on graphical realism and rely on simple rule-based models and therefore fail to accurately represent the complexity of driving behaviors and interactions. Artificial intelligence (AI) has shown strong potential to address these limitations; however, despite the rapid progress across AI methodologies, a comprehensive survey of their application to mixed autonomy traffic simulation remains lacking. Existing surveys either focus on simulation tools without examining the AI methods behind them, or cover ego-centric decision-making without addressing the broader challenge of modeling surrounding traffic. Moreover, they do not offer a unified taxonomy of AI methods covering individual behavior modeling to full scene simulation. To address these gaps, this survey provides a structured review and synthesis of AI methods for modeling AV and human driving behavior in mixed autonomy traffic simulation. We introduce a taxonomy that organizes methods into three families: agent-level behavior models, environment-level simulation methods, and cognitive and physics-informed methods. The survey analyzes how existing simulation platforms fall short of the needs of mixed autonomy research and outlines directions to narrow this gap. It also provides a chronological overview of AI methods and reviews evaluation protocols and metrics, simulation tools, and datasets. By covering both traffic engineering and computer science perspectives, we aim to bridge the gap between these two communities.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper is a survey synthesizing AI methods for modeling and simulating mixed automated and human-driven traffic. It introduces a three-family taxonomy (agent-level behavior models, environment-level simulation methods, and cognitive/physics-informed methods), reviews shortcomings of existing simulation platforms for mixed-autonomy research, provides a chronological overview of methods, and discusses evaluation protocols, metrics, tools, and datasets while bridging traffic engineering and computer science perspectives.
Significance. If the taxonomy is coherently justified and the literature coverage representative, the survey could serve as a useful reference for AV validation research by organizing disparate methods and highlighting platform gaps that hinder realistic mixed-traffic simulation. The multi-community perspective and focus on evaluation add practical value for guiding future platform development.
major comments (2)
- [Taxonomy introduction] The central taxonomy claim requires clearer delineation of category boundaries; e.g., the section introducing the three families does not specify decision criteria for assigning a method that combines agent behavior with physics constraints to one family versus another, risking overlap that weakens the synthesis.
- [Platform analysis] The analysis of simulation platform gaps (which underpins the call for new directions) relies on the reviewed literature but does not include a systematic comparison table or subsection quantifying how many of the cited works were tested in each platform, making it difficult to assess whether the identified shortcomings are representative.
minor comments (2)
- [Chronological overview] The chronological overview would benefit from an explicit timeline figure or table to improve readability and allow readers to trace method evolution across the three families.
- [Evaluation protocols] Ensure that all evaluation metrics discussed are accompanied by at least one concrete example from the reviewed papers showing how the metric was applied in a mixed-traffic setting.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the recommendation for minor revision. We address each major comment below with point-by-point responses, indicating the changes we will incorporate to strengthen the manuscript.
read point-by-point responses
-
Referee: [Taxonomy introduction] The central taxonomy claim requires clearer delineation of category boundaries; e.g., the section introducing the three families does not specify decision criteria for assigning a method that combines agent behavior with physics constraints to one family versus another, risking overlap that weakens the synthesis.
Authors: We agree that explicit decision criteria are needed to clarify category boundaries and minimize ambiguity for hybrid approaches. In the revised manuscript, we will expand the taxonomy introduction section with a dedicated paragraph that states the primary assignment criteria: (1) the dominant modeling focus (individual agent behavior versus scene-level dynamics), (2) the core methodological emphasis (purely data-driven versus incorporation of cognitive or physics-based constraints), and (3) the primary application scope (agent-centric versus environment-centric simulation). We will also include two to three concrete examples of boundary cases, such as physics-informed agent models, and explain their placement to illustrate how overlaps are resolved. revision: yes
-
Referee: [Platform analysis] The analysis of simulation platform gaps (which underpins the call for new directions) relies on the reviewed literature but does not include a systematic comparison table or subsection quantifying how many of the cited works were tested in each platform, making it difficult to assess whether the identified shortcomings are representative.
Authors: We acknowledge that a quantitative summary would improve the ability to evaluate the representativeness of the platform shortcomings. In the revised version, we will add a new subsection and accompanying table that tabulates the simulation platforms employed across the reviewed works, including counts or proportions for each major platform where this information is explicitly available in the cited literature. The table will be accompanied by a brief discussion of its scope and any limitations arising from papers that do not report platform details. revision: yes
Circularity Check
No significant circularity; survey synthesizes external literature
full rationale
This paper is a literature survey that reviews and organizes existing AI methods for mixed-autonomy traffic simulation into a three-family taxonomy (agent-level, environment-level, cognitive/physics-informed). No new derivations, equations, fitted parameters, or quantitative predictions are claimed. The taxonomy is an organizing framework drawn from reviewed external works rather than a self-derived result. No self-definitional steps, fitted-input predictions, or load-bearing self-citations that reduce the central synthesis claim to unverified inputs appear. Claims rest on coverage of prior literature, which is independently checkable outside the paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Modeling automated driving in microscopic traffic simulations for traffic performance evaluations: Aspects to consider and state of the practice
Haneen Farah, Irene Postigo, Bahman Madadi, Matin Moarefianpour, Gerben van Beukel, Bart van Arem, and Johan Olstam. Modeling automated driving in microscopic traffic simulations for traffic performance evaluations: Aspects to consider and state of the practice. IEEE Open Journal of Intelligent Transportation Systems, 3:536–546, 2022
2022
-
[2]
Gpudrive: Data-driven, multi-agent driving simulation at 1 million fps
Saman Kazemkhani, Aarav Pandya, Daphne Cornelisse, Brennan Shacklett, and Eugene Vinitsky. Gpudrive: Data-driven, multi-agent driving simulation at 1 million fps. InInternational Conference on Learning Representations (ICLR), 2025. Poster
2025
-
[3]
Microscopic traffic simulation using sumo
Pablo Álvarez López, Michael Behrisch, Laura Bieker-Walz, Jakob Erdmann, Yun-Pang Flötteröd, Robert Hilbrich, Leonhard Lücken, Johannes Rummel, Peter Wagner, and Evamarie Wießner. Microscopic traffic simulation using sumo. In2018 21st International Conference on Intelligent Transportation Systems (ITSC), pages 2575–2582. IEEE, 2018
2018
-
[4]
Ptv vissim – multimodal traffic simulation software
PTV Group. Ptv vissim – multimodal traffic simulation software. Available at: https://www.ptvgroup.com/en-us/products/ptv-vissim
-
[5]
Carla: An open urban driving simulator
Alexey Dosovitskiy, German Ros, Felipe Codevilla, Antonio Lopez, and Vladlen Koltun. Carla: An open urban driving simulator. In Conference on Robot Learning, pages 1–16. PMLR, 2017
2017
-
[6]
Congested traffic states in empirical observations and microscopic simulations
Martin Treiber, Ansgar Hennecke, and Dirk Helbing. Congested traffic states in empirical observations and microscopic simulations. Physical Review E, 62(2):1805, 2000
2000
-
[7]
General lane- changing model mobil for car-following models.Transportation Research Record, 1999(1):86–94, 2007
Arne Kesting, Martin Treiber, and Dirk Helbing. General lane- changing model mobil for car-following models.Transportation Research Record, 1999(1):86–94, 2007
1999
-
[8]
Social behavior for autonomous vehicles.Proceedings of the National Academy of Sciences, 116(50):24972–24978, 2019
Wilko Schwarting, Javier Alonso-Mora, and Daniela Rus. Social behavior for autonomous vehicles.Proceedings of the National Academy of Sciences, 116(50):24972–24978, 2019
2019
-
[9]
Herbert A. Simon. A behavioral model of rational choice.The Quarterly Journal of Economics, 69(1):99–118, 1955
1955
-
[10]
A language agent for au- tonomous driving
Jiageng Mao, Junjie Ye, Yuxi Qian, Marco Pavone, and Yue Wang. A language agent for autonomous driving.arXiv preprint arXiv:2311.10813, 2023
-
[11]
Dilu: A knowledge- driven approach to autonomous driving with large language models
Licheng Wen, Daocheng Fu, Xin Li, Xinyu Cai, Tao Ma, Pinlong Cai, Min Dou, Botian Shi, Liang He, and Yu Qiao. Dilu: A knowledge- driven approach to autonomous driving with large language models. In International Conference on Learning Representations (ICLR), 2024
2024
-
[12]
Stochastic trajectory prediction via motion indeterminacy diffusion
Tianpei Gu, Guangyi Chen, Junlong Li, Chunze Lin, Yongming Rao, Jie Zhou, and Jiwen Lu. Stochastic trajectory prediction via motion indeterminacy diffusion. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 17113– 17122, 2022
2022
-
[13]
Motiondiffuser: Controllable multi- agent motion prediction using diffusion
Chiyu Jiang, Andre Cornman, Cheolho Park, Benjamin Sapp, Yin Zhou, and Dragomir Anguelov. Motiondiffuser: Controllable multi- agent motion prediction using diffusion. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 9644–9653, 2023
2023
-
[14]
ALVINN: An autonomous land vehicle in a neural network
Dean A Pomerleau. ALVINN: An autonomous land vehicle in a neural network. InAdvances in Neural Information Processing Systems, volume 1, 1989
1989
-
[15]
End to End Learning for Self-Driving Cars
Mariusz Bojarski, Davide Del Testa, Daniel Dworakowski, Bernhard Firner, Beat Flepp, Prasoon Goyal, Lawrence D Jackel, Mathew Monfort, Urs Muller, Jiakai Zhang, et al. End to end learning for self-driving cars.arXiv preprint arXiv:1604.07316, 2016
work page internal anchor Pith review arXiv 2016
-
[16]
End-to-end driving via conditional imitation learning
Felipe Codevilla, Matthias Müller, Antonio López, Vladlen Koltun, and Alexey Dosovitskiy. End-to-end driving via conditional imitation learning. In2018 IEEE international conference on robotics and automation (ICRA), pages 4693–4700. IEEE, 2018
2018
-
[17]
Shai Shalev-Shwartz, Shaked Shammah, and Amnon Shashua. Safe, multi-agent reinforcement learning for autonomous driving.arXiv preprint arXiv:1610.03295, 2016. VOLUME , 37 Rahmaniet al.: Artificial Intelligence for Modeling and Simulation of Mixed Automated and Human Traffic
-
[18]
Learning to drive in a day
Alex Kendall, Jeffrey Hawke, David Janz, Przemyslaw Mazur, Daniele Reda, John-Mark Allen, Vinh-Dieu Lam, Alex Bewley, and Amar Shah. Learning to drive in a day. In2019 International Conference on Robotics and Automation (ICRA), pages 8248–8254. IEEE, 2019
2019
-
[19]
Gaia-2: A controllable multi-view generative world model for autonomous driving,
Lloyd Russell, Anthony Hu, Lorenzo Bertoni, George Fedoseev, Jamie Shotton, Elahe Arani, and Gianluca Corrado. Gaia-2: A controllable multi-view generative world model for autonomous driving.arXiv preprint arXiv:2503.20523, 2025. Technical report
-
[20]
Choose your simulator wisely: A review on open-source simulators for autonomous driving.IEEE Transactions on Intelligent Vehicles, 9(5):4861–4876, 2024
Yueyuan Li, Wei Yuan, Songan Zhang, Weihao Yan, Qiyuan Shen, Chunxiang Wang, and Ming Yang. Choose your simulator wisely: A review on open-source simulators for autonomous driving.IEEE Transactions on Intelligent Vehicles, 9(5):4861–4876, 2024
2024
-
[21]
Xuan Di and Rongye Shi. A survey on autonomous vehicle control in the era of mixed-autonomy: From physics-based to AI-guided driving policy learning.Transportation Research Part C: Emerging Technologies, 125:103008, 2021
2021
-
[22]
Planning and decision-making for autonomous vehicles.Annual Review of Control, Robotics, and Autonomous Systems, 1(1):187–210, 2018
Wilko Schwarting, Javier Alonso-Mora, and Daniela Rus. Planning and decision-making for autonomous vehicles.Annual Review of Control, Robotics, and Autonomous Systems, 1(1):187–210, 2018
2018
-
[23]
Qi, Yin Zhou, Zoey Yang, Aurélien Chouard, Pei Sun, Jiquan Ngiam, Vijay Vasudevan, Alexander McCauley, Jonathon Shlens, and Dragomir Anguelov
Scott Ettinger, Shuyang Cheng, Benjamin Caine, Chenxi Liu, Hang Zhao, Sabeek Pradhan, Yuning Chai, Ben Sapp, Charles R. Qi, Yin Zhou, Zoey Yang, Aurélien Chouard, Pei Sun, Jiquan Ngiam, Vijay Vasudevan, Alexander McCauley, Jonathon Shlens, and Dragomir Anguelov. Large scale interactive motion forecasting for autonomous driving: The Waymo open motion datas...
2021
-
[24]
Argoverse 2: Next Generation Datasets for Self-Driving Perception and Forecasting
Benjamin Wilson, William Qi, Tanmay Agarwal, John Lambert, Jagjeet Singh, Siddhesh Khandelwal, Bowen Pan, Ratnesh Kumar, Andrew Hartnett, Jhony Kaesemodel Pontes, et al. Argoverse 2: Next generation datasets for self-driving perception and forecasting.arXiv preprint arXiv:2301.00493, 2023
work page internal anchor Pith review arXiv 2023
-
[25]
arXiv preprint arXiv:2106.11810 (2021) 3, 7
Holger Caesar, Juraj Kabzan, Kok Seang Tan, Whye Kit Fong, Eric Wolff, Alex Lang, Luke Fletcher, Oscar Beijbom, and Sammy Omari. nuplan: A closed-loop ml-based planning benchmark for autonomous vehicles.arXiv preprint, 2021. arXiv:2106.11810
-
[26]
The waymo open sim agents challenge.Advances in Neural Information Processing Systems (NeurIPS), Track on Datasets and Benchmarks,
Nico Montali, John Lambert, Paul Mougin, Alex Kuefler, Nick Rhinehart, Michelle Li, Cole Gulino, Tristan Emrich, Zoey Yang, Shimon Whiteson, Brandyn White, and Dragomir Anguelov. The waymo open sim agents challenge.Advances in Neural Information Processing Systems (NeurIPS), Track on Datasets and Benchmarks,
-
[27]
A survey of deep learning applications to autonomous vehicle control.IEEE Transactions on Intelligent Transportation Systems, 22(2):712–733, 2021
Sampo Kuutti, Richard Bowden, Yaochu Jin, Phil Barber, and Saber Fallah. A survey of deep learning applications to autonomous vehicle control.IEEE Transactions on Intelligent Transportation Systems, 22(2):712–733, 2021
2021
-
[28]
A survey of deep learning techniques for autonomous driving
Sorin Grigorescu, Bogdan Trasnea, Tiberiu Cocias, and Gigel Mace- sanu. A survey of deep learning techniques for autonomous driving. Journal of Field Robotics, 37(3):362–386, 2020
2020
-
[29]
Ravi Kiran, Ibrahim Sobh, Victor Talpaert, Patrick Mannion, Ahmad A
B. Ravi Kiran, Ibrahim Sobh, Victor Talpaert, Patrick Mannion, Ahmad A. Al Sallab, Senthil Yogamani, and Patrick Pérez. Deep reinforcement learning for autonomous driving: A survey.IEEE Transactions on Intelligent Transportation Systems, 23(6):4909–4926, 2022
2022
-
[30]
End-to-end autonomous driving: Challenges and frontiers.IEEE Transactions on Pattern Analysis and Machine Intelligence, 46(12):10164–10183, 2024
Li Chen, Penghao Wu, Kashyap Chitta, Bernhard Jaeger, Andreas Geiger, and Hongyang Li. End-to-end autonomous driving: Challenges and frontiers.IEEE Transactions on Pattern Analysis and Machine Intelligence, 46(12):10164–10183, 2024
2024
-
[31]
Lin, and Zhigang Deng
Qianwen Chao, Huikun Bi, Weizi Li, Tianlu Mao, Zhaoqi Wang, Ming C. Lin, and Zhigang Deng. A survey on visual traffic simulation: Models, evaluations, and applications in autonomous driving.Computer Graphics Forum, 39(1):287–308, 2020
2020
-
[32]
Data- driven traffic simulation: A comprehensive review.IEEE Transactions on Intelligent Vehicles, 9(4):4730–4748, 2024
Di Chen, Meixin Zhu, Hai Yang, Xuesong Wang, and Ye Wang. Data- driven traffic simulation: A comprehensive review.IEEE Transactions on Intelligent Vehicles, 9(4):4730–4748, 2024
2024
-
[33]
A survey on safety-critical driving scenario generation— a methodological perspective.IEEE Transactions on Intelligent Transportation Systems, 24(7):6971–6988, 2023
Wenhao Ding, Chejian Xu, Mansur Arief, Haohong Lin, Bo Li, and Ding Zhao. A survey on safety-critical driving scenario generation— a methodological perspective.IEEE Transactions on Intelligent Transportation Systems, 24(7):6971–6988, 2023
2023
-
[34]
ChauffeurNet: Learning to drive by imitating the best and synthesizing the worst
Mayank Bansal, Alex Krizhevsky, and Abhijit Ogale. ChauffeurNet: Learning to drive by imitating the best and synthesizing the worst. InRobotics: Science and Systems, 2019
2019
-
[35]
Gordon, and J
Stéphane Ross, Geoffrey J. Gordon, and J. Andrew Bagnell. A reduc- tion of imitation learning and structured prediction to no-regret online learning. InProceedings of the Fourteenth International Conference on Artificial Intelligence and Statistics (AISTATS), volume 15 of Proceedings of Machine Learning Research, pages 627–635, 2011
2011
-
[36]
Multi-modal fusion transformer for end-to-end autonomous driving
Aditya Prakash, Kashyap Chitta, and Andreas Geiger. Multi-modal fusion transformer for end-to-end autonomous driving. InIEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 7077– 7087, 2021
2021
-
[37]
Urban driver: Learning to drive from real-world demonstrations using policy gradients
Oliver Scheel, Luca Bergamini, Maciej Wolczyk, Bła ˙zej Osi ´nski, and Peter Ondruska. Urban driver: Learning to drive from real-world demonstrations using policy gradients. InProceedings of the 5th Conference on Robot Learning (CoRL), volume 164 ofProceedings of Machine Learning Research, pages 718–728. PMLR, 2022
2022
-
[38]
Covernet: Multimodal behavior prediction using trajectory sets
Tung Phan-Minh, Elena Corina Grigore, Freddy A Boulton, Oscar Beijbom, and Eric M Wolff. Covernet: Multimodal behavior prediction using trajectory sets. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 14074– 14083, 2020
2020
-
[39]
Multipath: Multiple probabilistic anchor trajectory hy- potheses for behavior prediction
Yuning Chai, Benjamin Sapp, Mayank Bansal, and Dragomir Anguelov. Multipath: Multiple probabilistic anchor trajectory hy- potheses for behavior prediction. InConference on Robot Learning (CoRL), pages 86–99, 2020
2020
-
[40]
Tnt: Target-driven trajectory prediction
Hang Zhao, Jiyang Gao, Tian Lan, Chen Sun, Benjamin Sapp, Balakrishnan Varadarajan, Yue Shen, Yi Shen, Yuning Chai, Cordelia Schmid, Congcong Li, and Dragomir Anguelov. Tnt: Target-driven trajectory prediction. InConference on Robot Learning (CoRL), pages 895–904, 2021
2021
-
[41]
Densetnt: End-to-end trajectory prediction from dense goal sets
Junru Gu, Chen Sun, and Hang Zhao. Densetnt: End-to-end trajectory prediction from dense goal sets. InProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pages 15283– 15292, 2021
2021
-
[42]
Lapred: Lane-aware prediction of multi-modal future trajectories of dynamic agents
ByeoungDo Kim, Seong Hyeon Park, Seokhwan Lee, Elbek Khoshimjonov, Dongsuk Kum, Junsoo Kim, Jeong Soo Kim, and Jun Won Choi. Lapred: Lane-aware prediction of multi-modal future trajectories of dynamic agents. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 14636–14645, 2021
2021
-
[43]
Learning to predict vehicle trajectories with model-based planning
Haoran Song, Di Luan, Wenchao Ding, Michael Y Wang, and Qifeng Chen. Learning to predict vehicle trajectories with model-based planning. InConference on Robot Learning, pages 1035–1045. PMLR, 2022
2022
-
[44]
End-to-end urban driving by imitating a reinforcement learning coach
Zhejun Zhang, Alexander Liniger, Dengxin Dai, Fisher Yu, and Luc Van Gool. End-to-end urban driving by imitating a reinforcement learning coach. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 15222–15232, 2021
2021
-
[45]
Imitation is not enough: Robustifying imitation with reinforcement learning for challenging driving scenarios
Eli Bronstein, Supratik Srinivasan, Sushant Paul, Aman Sinha, Matthew O’Kelly, Payam Nikdel, and Shimon Whiteson. Imitation is not enough: Robustifying imitation with reinforcement learning for challenging driving scenarios. In2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 5711–
-
[46]
Think2drive: Efficient reinforcement learning by thinking in latent world model for quasi-realistic autonomous driving (in carla-v2)
Qifeng Li, Xiaosong Jia, Li Chen, Junchi Yan, Ping Luo Liu, and Hongyang Li. Think2drive: Efficient reinforcement learning by thinking in latent world model for quasi-realistic autonomous driving (in carla-v2). InEuropean Conference on Computer Vision, pages 41–57. Springer, 2024
2024
-
[47]
Human as AI mentor: Enhanced human-in-the-loop reinforcement learning for safe and efficient autonomous driving.Communications in Transportation Research, 4:100127, 2024
Zilin Huang, Zihao Sheng, Chengyuan Ma, and Sikai Chen. Human as AI mentor: Enhanced human-in-the-loop reinforcement learning for safe and efficient autonomous driving.Communications in Transportation Research, 4:100127, 2024
2024
-
[48]
Maximum entropy inverse reinforcement learning
Brian D Ziebart, Andrew L Maas, J Andrew Bagnell, and Anind K Dey. Maximum entropy inverse reinforcement learning. InAAAI Conference on Artificial Intelligence, volume 8, pages 1433–1438, 2008
2008
-
[49]
Generative adversarial imitation learning.Advances in neural information processing systems, 29, 2016
Jonathan Ho and Stefano Ermon. Generative adversarial imitation learning.Advances in neural information processing systems, 29, 2016
2016
-
[50]
Imitating driver behavior with generative adversarial networks
Alex Kuefler, Jeremy Morton, Timothy Wheeler, and Mykel Kochen- derfer. Imitating driver behavior with generative adversarial networks. In2017 IEEE Intelligent Vehicles Symposium (IV), pages 204–211. IEEE, 2017
2017
-
[51]
Multi-agent imitation learning for driving simulation
Raunak P Bhattacharyya, Derek J Phillips, Blake Wulfe, Jeremy Mor- ton, Alex Kuefler, and Mykel J Kochenderfer. Multi-agent imitation learning for driving simulation. In2018 IEEE/RSJ International 38 VOLUME , Conference on Intelligent Robots and Systems (IROS), pages 1534–
-
[52]
Learning robust rewards with adverserial inverse reinforcement learning
Justin Fu, Katie Luo, and Sergey Levine. Learning robust rewards with adverserial inverse reinforcement learning. InInternational Conference on Learning Representations, 2018
2018
-
[53]
Simulating emergent properties of human driving behavior using multi- agent reward augmented imitation learning
Raunak P Bhattacharyya, Derek J Phillips, Changliu Liu, Jayesh K Gupta, Katherine Driggs-Campbell, and Mykel J Kochenderfer. Simulating emergent properties of human driving behavior using multi- agent reward augmented imitation learning. In2019 International Conference on Robotics and Automation (ICRA), pages 789–795. IEEE, 2019
2019
-
[54]
End-to-end interpretable neural motion planner
Wenyuan Zeng, Wenjie Luo, Simon Suo, Abbas Sadat, Bin Yang, Sergio Casas, and Raquel Urtasun. End-to-end interpretable neural motion planner. InIEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 8660–8669, 2019
2019
-
[55]
Planning- oriented autonomous driving
Yihan Hu, Jiazhi Yang, Li Chen, Keyu Li, Chonghao Sima, Xizhou Zhu, Siqi Chai, Senyao Du, Tianwei Lin, Wenhai Wang, et al. Planning- oriented autonomous driving. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 17853– 17862, 2023
2023
-
[56]
V AD: Vectorized scene representation for efficient autonomous driving
Bo Jiang, Shaoyu Chen, Qing Xu, Bencheng Liao, Jiajie Chen, Helong Zhou, Qian Zhang, Wenyu Liu, Chang Huang, and Xinggang Wang. V AD: Vectorized scene representation for efficient autonomous driving. InIEEE/CVF International Conference on Computer Vision, pages 8340–8350, 2023
2023
-
[57]
Sparsedrive: End-to-end autonomous driving via sparse scene representation
Wenchao Sun, Xuewu Lin, Yining Shi, Chuang Zhang, Haoran Wu, and Sifa Zheng. Sparsedrive: End-to-end autonomous driving via sparse scene representation. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 8795–8801. IEEE, 2025
2025
-
[58]
Safety-enhanced autonomous driving using interpretable sensor fusion transformer
Hao Shao, Letian Wang, RuoBing Chen, Hongsheng Li, and Yu Liu. Safety-enhanced autonomous driving using interpretable sensor fusion transformer. InConference on Robot Learning, pages 726–737, 2023
2023
-
[59]
Think twice before driving: Towards scalable decoders for end-to-end autonomous driving
Xiaosong Jia, Penghao Wu, Li Chen, Jiangwei Xie, Conghui He, Junchi Yan, and Hongyang Li. Think twice before driving: Towards scalable decoders for end-to-end autonomous driving. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 21983–21994, 2023
2023
-
[60]
NA VSIM: Data- driven non-reactive autonomous vehicle simulation and benchmarking
Daniel Dauner, Marcel Hallgarten, Tianyu Li, Xinshuo Weng, Zhiyu Huang, Zetong Yang, Hongyang Li, Igor Gilitschenski, Boris Ivanovic, Marco Pavone, Andreas Geiger, and Kashyap Chitta. NA VSIM: Data- driven non-reactive autonomous vehicle simulation and benchmarking. InAdvances in Neural Information Processing Systems (NeurIPS), 2024
2024
-
[61]
Recurrent world models facilitate policy evolution
David Ha and Jürgen Schmidhuber. Recurrent world models facilitate policy evolution. InAdvances in Neural Information Processing Systems 31, pages 2451–2463. Curran Associates, Inc., 2018
2018
-
[62]
Dream to control: Learning behaviors by latent imagination
Danijar Hafner, Timothy Lillicrap, Jimmy Ba, and Mohammad Norouzi. Dream to control: Learning behaviors by latent imagination. InInternational Conference on Learning Representations (ICLR), 2020
2020
-
[63]
Mastering Diverse Domains through World Models
Danijar Hafner, Jurgis Pasukonis, Jimmy Ba, and Timothy P. Lillicrap. Mastering diverse domains through world models.arXiv preprint arXiv:2301.04104, 2023
work page internal anchor Pith review arXiv 2023
-
[64]
Model-based imita- tion learning for urban driving
Anthony Hu, Gianluca Corber, Matthias Muller, Dragomir Anguelov, Sergio Casas, Raquel Urtasun, and Alex Kendall. Model-based imita- tion learning for urban driving. InAdvances in Neural Information Processing Systems, volume 35, pages 20703–20716, 2022
2022
-
[65]
Adawm: Adaptive world model based planning for autonomous driving
Hang Wang, Xin Ye, Feng Tao, Chenbin Pan, Abhirup Mallik, Burhaneddin Yaman, Liu Ren, and Junshan Zhang. Adawm: Adaptive world model based planning for autonomous driving. InInternational Conference on Learning Representations (ICLR), 2025
2025
-
[66]
Imagine-2-drive: Leveraging high-fidelity world models via multi-modal diffusion policies
Anant Garg and K Madhava Krishna. Imagine-2-drive: Leveraging high-fidelity world models via multi-modal diffusion policies. In2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 4188–4195. IEEE, 2025
2025
-
[67]
Languagempc: Large language models as deci- sion makers for autonomous driving,
Hao Sha, Yao Mu, Yuxuan Jiang, Li Chen, Chenfeng Xu, Ping Luo, Shengbo Eben Li, Masayoshi Tomizuka, Wei Zhan, and Mingyu Ding. Languagempc: Large language models as decision makers for autonomous driving.arXiv preprint arXiv:2310.03026, 2023
-
[68]
GPT-Driver: Learning to drive with GPT
Jiageng Mao, Yuxi Qian, Hang Zhao, and Yue Wang. GPT-Driver: Learning to drive with GPT. InAdvances in Neural Information Processing Systems (NeurIPS), 2023
2023
-
[69]
Wong, Zhenguo Li, and Hengshuang Zhao
Zhenhua Xu, Yujia Zhang, Enze Xie, Zhen Zhao, Yong Guo, Kwan- Yee K. Wong, Zhenguo Li, and Hengshuang Zhao. DriveGPT4: Interpretable end-to-end autonomous driving via large language model. IEEE Robotics and Automation Letters, 2024
2024
-
[70]
Learning by cheating
Dian Chen, Brady Zhou, Vladlen Koltun, and Philipp Krähenbühl. Learning by cheating. InConference on Robot Learning, pages 66–75, 2020
2020
-
[71]
Dart: Noise injection for robust imitation learning
Michael Laskey, Jonathan Lee, Roy Fox, Anca Dragan, and Ken Goldberg. Dart: Noise injection for robust imitation learning. In Proceedings of the 1st Conference on Robot Learning (CoRL), volume 78 ofProceedings of Machine Learning Research, pages 143–156, 2017
2017
-
[72]
Sidrane, Katherine R
Michael Kelly, Chelsea R. Sidrane, Katherine R. Driggs-Campbell, and Mykel J. Kochenderfer. HG-DAgger: Interactive imitation learning with human experts. In2019 International Conference on Robotics and Automation (ICRA), 2019
2019
-
[73]
Mega-dagger: Imitation learning with multiple imperfect experts
Xiatao Sun, Shuo Yang, Mingyan Zhou, Kunpeng Liu, and Rahul Mangharam. Mega-dagger: Imitation learning with multiple imperfect experts. In2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC), pages 1–8. IEEE, 2024
2024
-
[74]
Exploring the limitations of behavior cloning for autonomous driving
Felipe Codevilla, Eder Santana, Antonio M López, and Adrien Gaidon. Exploring the limitations of behavior cloning for autonomous driving. InIEEE/CVF International Conference on Computer Vision, pages 9329–9338, 2019
2019
-
[75]
End-to-end model-free reinforcement learning for urban driving using implicit affordances
Marin Toromanoff, Emilie Wirbel, and Fabien Moutarde. End-to-end model-free reinforcement learning for urban driving using implicit affordances. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 7153–7162, 2020
2020
-
[76]
Safe reinforcement learning for autonomous vehicles through parallel constrained policy optimization
Long Wen, Junqiang Duan, Shengbo Li, Shaobing Xu, and Huei Peng. Safe reinforcement learning for autonomous vehicles through parallel constrained policy optimization. InIEEE International Conference on Intelligent Transportation Systems (ITSC), pages 1–7, 2020
2020
-
[77]
Driving behavior modeling using naturalistic human driving data with inverse reinforcement learning.IEEE Transactions on Intelligent Transportation Systems, 23(8):10239–10251, 2021
Zhiyu Huang, Jingda Wu, and Chen Lv. Driving behavior modeling using naturalistic human driving data with inverse reinforcement learning.IEEE Transactions on Intelligent Transportation Systems, 23(8):10239–10251, 2021
2021
-
[78]
Decision making for autonomous driving via augmented adversarial inverse reinforcement learning
Pin Wang, Dapeng Liu, Jiayu Chen, Hanhan Li, and Ching-Yao Chan. Decision making for autonomous driving via augmented adversarial inverse reinforcement learning. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 1036–1042. IEEE, 2021
2021
-
[79]
Modeling driver behavior using adversarial inverse reinforcement learning
Moritz Sackmann, Henrik Bey, Ulrich Hofmann, and Jörn Thielecke. Modeling driver behavior using adversarial inverse reinforcement learning. In2022 IEEE Intelligent Vehicles Symposium (IV), pages 1683–1690. IEEE, 2022
2022
-
[80]
Transfuser: Imitation with transformer- based sensor fusion for autonomous driving.IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023
Kashyap Chitta, Aditya Prakash, Bernhard Jaeger, Zehao Yu, Katrin Renz, and Andreas Geiger. Transfuser: Imitation with transformer- based sensor fusion for autonomous driving.IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.