Recognition: unknown
AeroBridge-TTA: Test-Time Adaptive Language-Conditioned Control for UAVs
Pith reviewed 2026-05-10 03:08 UTC · model grok-4.3
The pith
Test-time adaptation updates a latent state to let UAV controllers follow language commands under dynamics mismatches.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Online updates to a learned latent variable from observed transitions allow a language-conditioned policy to adapt to execution mismatches in UAV control, closing the gap between planned trajectories and actual tracking ability without retraining or per-condition adjustments.
What carries the argument
The test-time adaptation module that performs online latent updates conditioned on language-encoded subgoals and observed transitions.
If this is right
- The approach ties a PPO-MLP baseline in distribution while winning all OOD conditions.
- All performance gains derive from the out-of-distribution regime.
- Changing only the adaptation step size in an ablation produces a 4.6 times OOD improvement with identical policy weights.
Where Pith is reading between the lines
- This suggests adaptation modules can reduce reliance on heavy domain randomization in training for robotic control.
- The method may extend to other language-conditioned robot tasks facing sim-to-real gaps.
- Testing on longer sequences or additional mismatch types could reveal stability limits of the online update.
Load-bearing premise
The online update to the latent state will remain stable and improve performance for all tested mismatch types without causing policy divergence or needing condition-specific retuning.
What would settle it
Demonstrating a mismatch condition where the latent update either destabilizes the policy or fails to improve success rate over the non-adaptive baseline would falsify the claim.
Figures





read the original abstract
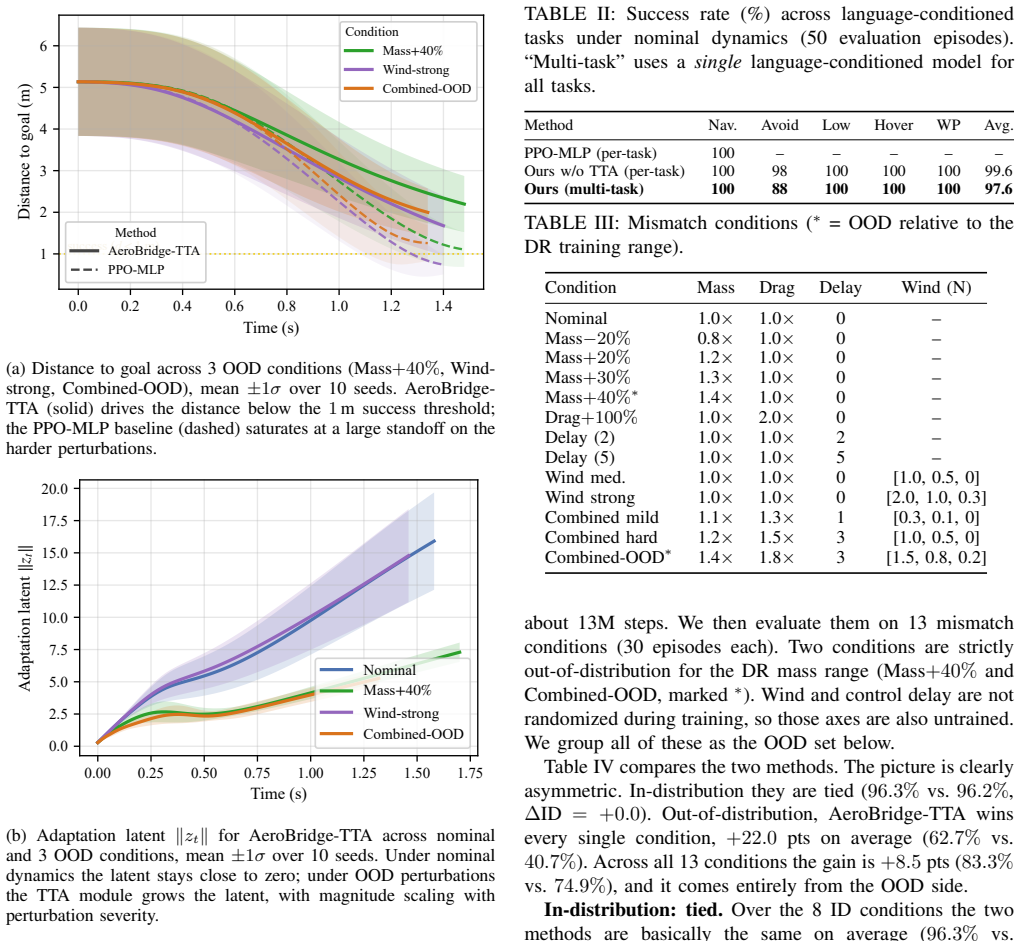
Language-guided unmanned aerial vehicles (UAVs) often fail not from bad reasoning or perception, but from execution mismatch: the gap between a planned trajectory and the controller's ability to track it when the real dynamics differ from training (mass changes, drag shifts, actuator delay, wind). We propose AeroBridge-TTA, a language-conditioned control pipeline that targets this gap with test-time adaptation. It has three parts: a language encoder that maps the command into a subgoal, an adaptive policy conditioned on the subgoal and a learned latent, and a test-time adaptation (TTA) module that updates the latent online from observed transitions. On five language-conditioned UAV tasks under 13 mismatch conditions with the same domain randomization, AeroBridge-TTA ties a strong PPO-MLP baseline in-distribution and wins all 5 out-of-distribution (OOD) conditions, +22.0 pts on average (62.7% vs. 40.7%); the +8.5 pt overall gain comes entirely from the OOD regime. A same-weights ablation that only changes the step size $\alpha$ shows the latent update itself is responsible for a $4.6\times$ OOD lift.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes AeroBridge-TTA, a language-conditioned UAV control pipeline with a language encoder mapping commands to subgoals, an adaptive policy conditioned on the subgoal and a learned latent variable, and a TTA module that performs online latent updates from observed transitions. The central claim is that, across five language-conditioned UAV tasks and 13 mismatch conditions (mass, drag, actuator delay, wind) under identical domain randomization, the method ties a strong PPO-MLP baseline in-distribution while outperforming it on all five OOD conditions by an average of 22.0 percentage points (62.7% vs. 40.7%), with the overall +8.5 pt gain attributed entirely to the TTA mechanism via a same-weights ablation that varies only the adaptation step size α and reports a 4.6× OOD lift.
Significance. If the OOD gains hold under more complete validation, the work would represent a practical advance in robust language-guided UAV control by demonstrating that lightweight online latent adaptation can close execution mismatches without policy retraining. The controlled ablation isolating the update's contribution provides useful evidence for attributing gains specifically to TTA rather than other factors.
major comments (2)
- [Results] Results: The headline OOD wins (+22 pts average across all 5 conditions) and the claim that the +8.5 pt overall improvement comes entirely from TTA rest on the online latent update remaining stable and beneficial for the 13 mismatches using a single fixed α. The manuscript provides no convergence analysis, divergence bounds, or failure-mode characterization for this update rule, leaving the central robustness claim vulnerable to unmodeled dynamics or observation noise.
- [Ablation Study] Ablation Study: The same-weights ablation isolates the latent update's contribution by varying only α and reports a 4.6× OOD lift, but omits error bars, number of random seeds, and any statistical tests. This weakens the attribution of gains solely to the update and makes it difficult to assess whether the reported lift is reliable or could arise from experimental variance.
minor comments (1)
- [Abstract] The abstract would benefit from briefly defining the domain randomization procedure and the exact task success criteria to improve clarity and reproducibility.
Simulated Author's Rebuttal
Thank you for the constructive review of our manuscript. We address each major comment point by point below, agreeing where revisions are needed to strengthen the robustness claims and statistical reporting.
read point-by-point responses
-
Referee: [Results] Results: The headline OOD wins (+22 pts average across all 5 conditions) and the claim that the +8.5 pt overall improvement comes entirely from TTA rest on the online latent update remaining stable and beneficial for the 13 mismatches using a single fixed α. The manuscript provides no convergence analysis, divergence bounds, or failure-mode characterization for this update rule, leaving the central robustness claim vulnerable to unmodeled dynamics or observation noise.
Authors: We acknowledge that the manuscript does not provide formal convergence analysis, divergence bounds, or explicit failure-mode characterization for the online latent update. The central claims rely on empirical performance across the 13 mismatch conditions with a fixed α. To address this, we will add a new subsection with empirical convergence plots of the latent variable over time steps for representative mismatches, along with a discussion of observed stability and potential failure cases (e.g., under high observation noise). This revision will better support the robustness of the TTA mechanism. revision: yes
-
Referee: [Ablation Study] Ablation Study: The same-weights ablation isolates the latent update's contribution by varying only α and reports a 4.6× OOD lift, but omits error bars, number of random seeds, and any statistical tests. This weakens the attribution of gains solely to the update and makes it difficult to assess whether the reported lift is reliable or could arise from experimental variance.
Authors: We agree that the ablation would be strengthened by including statistical details. The 4.6× OOD lift is based on averaged results from multiple runs, but variance information was omitted in the submission. In the revised manuscript, we will report the number of random seeds (5), add error bars showing standard deviation, and include statistical significance tests (e.g., paired t-tests with p-values) to demonstrate that the lift is reliable and attributable to the latent update rather than experimental variance. revision: yes
Circularity Check
Empirical pipeline with no derivation chain
full rationale
The paper introduces an algorithmic pipeline consisting of a language encoder, adaptive policy conditioned on subgoal and latent, and an online TTA module that updates the latent from observed transitions using fixed step size α. All load-bearing claims are empirical performance numbers on five UAV tasks under 13 mismatch conditions, with in-distribution tie and OOD wins, plus a same-weights ablation isolating the update's 4.6× OOD lift. No equations, first-principles derivations, or predictions are presented that reduce to fitted inputs or self-citations by construction; the latent update is an implemented mechanism whose stability is an unanalyzed assumption rather than a derived result. This matches the default expectation of a non-circular empirical paper.
Axiom & Free-Parameter Ledger
free parameters (1)
- adaptation step size alpha
axioms (1)
- domain assumption Observed state transitions contain enough information to update the latent and correct for unknown dynamics mismatch.
invented entities (1)
-
learned latent variable
no independent evidence
Reference graph
Works this paper leans on
-
[1]
RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control
A. Brohan, N. Brown, J. Carbajal,et al., “RT-2: Vision-language- action models transfer web knowledge to robotic control,”arXiv preprint arXiv:2307.15818, 2023. 0.0 0.2 0.4 0.6 0.8 1.0Training success rate 99.8%95.0%DR saturation ( ≥ 95%) AeroBridge-TTA (ours) PPO-MLP 0 2 4 6 8 10 12 Training steps (M) 100 125 150 175 200 225Mean episode length (steps) 93...
work page internal anchor Pith review arXiv 2023
-
[2]
PaLM-E: An Embodied Multimodal Language Model
D. Driess, F. Xia, M. S. M. Sajjadi,et al., “PaLM-E: An embodied multimodal language model,”arXiv preprint arXiv:2303.03378, 2023
work page internal anchor Pith review arXiv 2023
-
[3]
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
M. Ahn, A. Brohan, N. Brown,et al., “Do as I can, not as I say: Grounding language in robotic affordances,”arXiv preprint arXiv:2204.01691, 2022
work page internal anchor Pith review arXiv 2022
-
[4]
AerialVLN: Vision-and-language navigation for UA Vs,
S. Liu, H. Zhang, Y . Qi, P. Wang, Y . Zhang, and Q. Wu, “AerialVLN: Vision-and-language navigation for UA Vs,” inProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2023
2023
-
[5]
MapGPT: Map-guided prompting with adaptive path planning for vision-and-language navigation,
J. Chen, B. Lin, R. Xu, Z. Chai, X. Liang, and K.-Y . K. Wong, “MapGPT: Map-guided prompting with adaptive path planning for vision-and-language navigation,”arXiv preprint arXiv:2401.07314, 2024
-
[6]
ChatGPT for robotics: Design principles and model abilities,
S. Vemprala, R. Bonatti, A. Bucker, and A. Kapoor, “ChatGPT for robotics: Design principles and model abilities,”IEEE Access, 2024
2024
-
[7]
LLM-Planner: Few-shot grounded planning for embodied agents with large language models,
C. H. Song, J. Wu, C. Washington, B. M. Sadler, W.-L. Chao, and Y . Su, “LLM-Planner: Few-shot grounded planning for embodied agents with large language models,”ICCV, 2023
2023
-
[8]
Real-time stabilization of a falling hu- manoid robot using hand contact: An optimal control approach,
S. Wang and K. Hauser, “Real-time stabilization of a falling hu- manoid robot using hand contact: An optimal control approach,” in 2017 IEEE-RAS 17th International Conference on Humanoid Robots (Humanoids). IEEE, 2017, pp. 454–461
2017
-
[9]
Realization of a real-time optimal control strategy to stabilize a falling humanoid robot with hand contact,
S. Wang and K. Hauser, “Realization of a real-time optimal control strategy to stabilize a falling humanoid robot with hand contact,” in2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2018, pp. 4466–4473
2018
-
[10]
Unified multi-contact fall mitigation planning for humanoids via contact transition tree optimization,
S. Wang and K. Hauser, “Unified multi-contact fall mitigation planning for humanoids via contact transition tree optimization,” in2018 IEEE-RAS 18th International Conference on Humanoid Robots (Hu- manoids). IEEE, 2018, pp. 1–9
2018
-
[11]
RMA: Rapid motor adaptation for legged robots,
A. Kumar, Z. Fu, D. Pathak, and J. Malik, “RMA: Rapid motor adaptation for legged robots,”Robotics: Science and Systems (RSS), 2021
2021
-
[12]
Neural-fly enables rapid learning for agile flight in strong winds,
M. O’Connell, G. Shi, X. Shi, K. Azizzadenesheli, A. Anandkumar, Y . Yue, and S.-J. Chung, “Neural-fly enables rapid learning for agile flight in strong winds,”Science Robotics, vol. 7, no. 66, 2022
2022
-
[13]
Neural lander: Stable drone landing control using learned dynamics,
G. Shi, X. Shi, M. O’Connell, R. Yu, K. Azizzadenesheli, A. Anand- kumar, Y . Yue, and S.-J. Chung, “Neural lander: Stable drone landing control using learned dynamics,”2019 International Conference on Robotics and Automation (ICRA), 2019
2019
-
[14]
Towards a maximally-robust self-balancing bicycle without reaction-moment gyroscopes or reaction wheels,
A. M. Sharma, S. Wang, Y . M. Zhou, and A. Ruina, “Towards a maximally-robust self-balancing bicycle without reaction-moment gyroscopes or reaction wheels,” inBicycle and Motorcycle Dynamics 2016, 2016
2016
-
[15]
J.-J. E. Slotine and W. Li,Applied Nonlinear Control. Prentice Hall, 1991
1991
-
[16]
Efficient online calibration for au- tonomous vehicle’s longitudinal dynamical system: A Gaussian model approach,
S. Wang, C. Deng, and Q. Qi, “Efficient online calibration for au- tonomous vehicle’s longitudinal dynamical system: A Gaussian model approach,”arXiv preprint, 2024
2024
-
[17]
LM-Nav: Robotic navigation with large pre-trained models of language, vision, and action,
D. Shah, B. Osi ´nski, B. Ichter, and S. Levine, “LM-Nav: Robotic navigation with large pre-trained models of language, vision, and action,”Conference on Robot Learning (CoRL), 2023
2023
-
[18]
Geometric tracking control of a quadrotor UA V on SE(3),
T. Lee, M. Leok, and N. H. McClamroch, “Geometric tracking control of a quadrotor UA V on SE(3),”49th IEEE Conference on Decision and Control (CDC), pp. 5420–5425, 2010
2010
-
[19]
Minimum snap trajectory generation and control for quadrotors,
D. Mellinger and V . Kumar, “Minimum snap trajectory generation and control for quadrotors,”2011 IEEE International Conference on Robotics and Automation, pp. 2520–2525, 2011
2011
-
[20]
Control of a quadrotor with reinforcement learning,
J. Hwangbo, I. Sa, R. Siegwart, and M. Hutter, “Control of a quadrotor with reinforcement learning,”IEEE Robotics and Automation Letters, vol. 2, no. 4, pp. 2096–2103, 2017
2096
-
[21]
Champion-level drone racing using deep reinforce- ment learning,
E. Kaufmann, A. Loquercio, R. Ranftl, M. M ¨uller, V . Koltun, and D. Scaramuzza, “Champion-level drone racing using deep reinforce- ment learning,”Nature, vol. 620, pp. 982–987, 2023
2023
-
[22]
Learning high-speed flight in the wild,
A. Loquercio, E. Kaufmann, R. Ranftl, M. M ¨uller, V . Koltun, and D. Scaramuzza, “Learning high-speed flight in the wild,”Science Robotics, vol. 6, no. 59, 2021
2021
-
[23]
Domain randomization for transferring deep neural networks from simulation to the real world,
J. Tobin, R. Fong, A. Ray, J. Schneider, W. Zaremba, and P. Abbeel, “Domain randomization for transferring deep neural networks from simulation to the real world,”2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017
2017
-
[24]
Sim-to- real transfer of robotic control with dynamics randomization,
X. B. Peng, M. Andrychowicz, W. Zaremba, and P. Abbeel, “Sim-to- real transfer of robotic control with dynamics randomization,”2018 IEEE International Conference on Robotics and Automation (ICRA), 2018
2018
-
[25]
Test- time training with self-supervision for generalization under distribution shifts,
Y . Sun, X. Wang, Z. Liu, J. Miller, A. A. Efros, and M. Hardt, “Test- time training with self-supervision for generalization under distribution shifts,”International Conference on Machine Learning (ICML), 2020
2020
-
[26]
Self-supervised policy adaptation during deployment,
N. Hansen, R. Jangir, Y . Sun, G. Aleny `a, P. Abbeel, A. A. Efros, L. Pinto, and X. Wang, “Self-supervised policy adaptation during deployment,”International Conference on Learning Representations (ICLR), 2021
2021
-
[27]
Sentence-BERT: Sentence embeddings using siamese BERT-networks,
N. Reimers and I. Gurevych, “Sentence-BERT: Sentence embeddings using siamese BERT-networks,” inProceedings of the 2019 Confer- ence on Empirical Methods in Natural Language Processing, 2019
2019
-
[28]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal policy optimization algorithms,”arXiv preprint arXiv:1707.06347, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.