Recognition: unknown
LeHome: A Simulation Environment for Deformable Object Manipulation in Household Scenarios
Pith reviewed 2026-05-08 11:18 UTC · model grok-4.3
The pith
LeHome is a simulation environment for high-fidelity modeling of deformable household objects across multiple robotic platforms including low-cost hardware.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
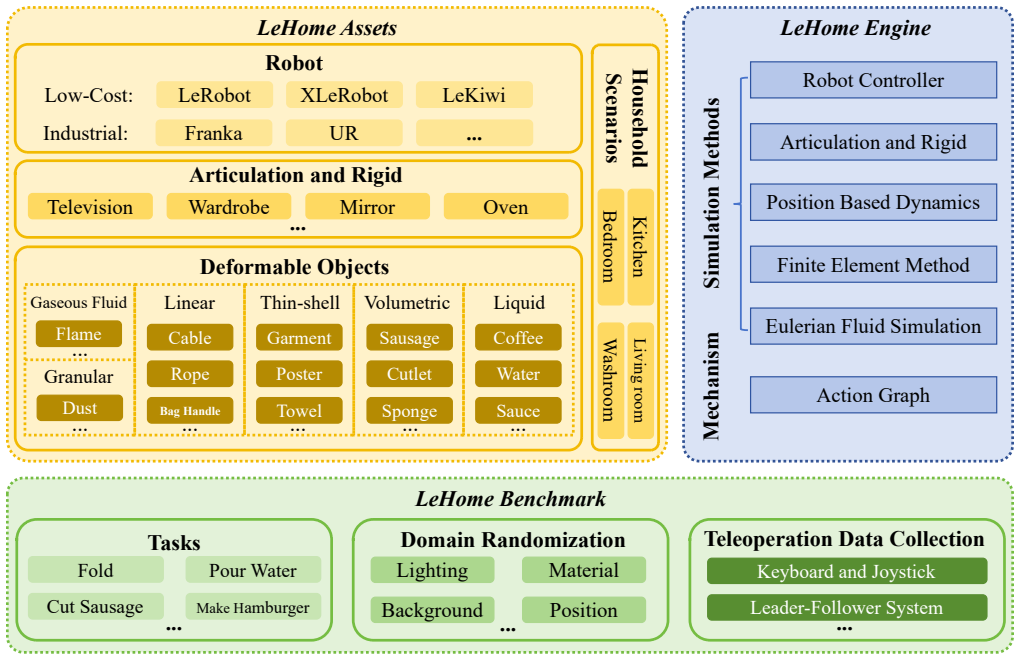
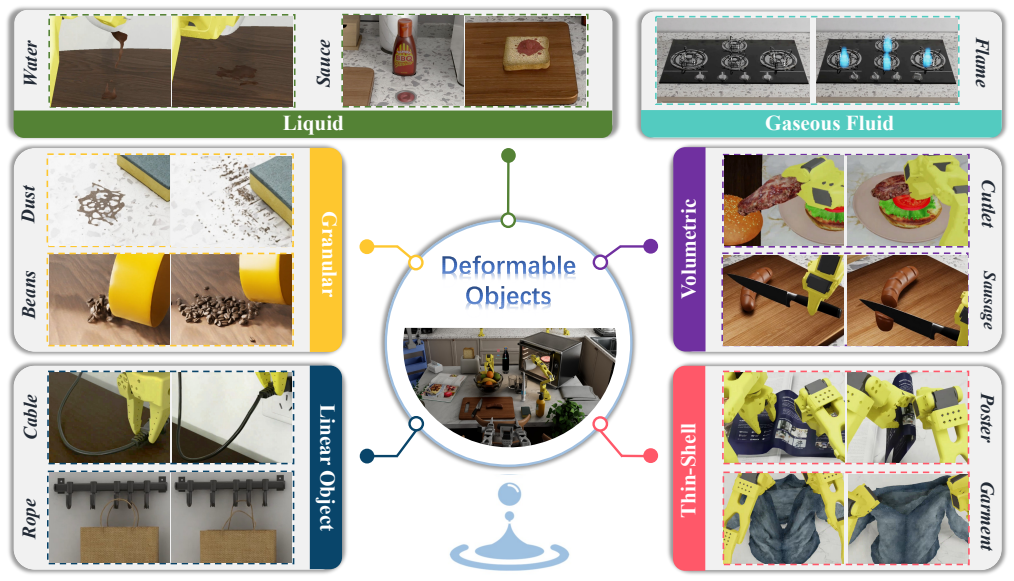
LeHome is a comprehensive simulation environment designed for deformable object manipulation in household scenarios. It covers a wide spectrum of deformable objects, such as garments and food items, offering high-fidelity dynamics and realistic interactions that existing simulators struggle to simulate accurately. Moreover, LeHome supports multiple robotic embodiments and emphasizes low-cost robots as a core focus, enabling end-to-end evaluation of household tasks on resource-constrained hardware. By bridging the gap between realistic deformable object simulation and practical robotic platforms, LeHome provides a scalable testbed for advancing household robotics.
What carries the argument
LeHome, the simulation environment that supplies high-fidelity deformable object models and multi-embodiment robot interfaces for household task evaluation.
Load-bearing premise
The physics engine and object models inside LeHome actually deliver higher fidelity and more realistic behavior for complex deformable dynamics and material properties than prior simulators.
What would settle it
A direct comparison of simulation results against real-world recordings of the same tasks, such as folding a garment or handling a food item with a low-cost robot, to check whether LeHome matches physical outcomes more closely than other available simulators.
Figures





read the original abstract
Household environments present one of the most common, impactful yet challenging application domains for robotics. Within household scenarios, manipulating deformable objects is particularly difficult, both in simulation and real-world execution, due to varied categories and shapes, complex dynamics, and diverse material properties, as well as the lack of reliable deformable-object support in existing simulations. We introduce LeHome, a comprehensive simulation environment designed for deformable object manipulation in household scenarios. LeHome covers a wide spectrum of deformable objects, such as garments and food items, offering high-fidelity dynamics and realistic interactions that existing simulators struggle to simulate accurately. Moreover, LeHome supports multiple robotic embodiments and emphasizes low-cost robots as a core focus, enabling end-to-end evaluation of household tasks on resource-constrained hardware. By bridging the gap between realistic deformable object simulation and practical robotic platforms, LeHome provides a scalable testbed for advancing household robotics. Webpage: https://lehome-web.github.io/ .
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces LeHome, a simulation environment for deformable object manipulation in household scenarios. It claims to cover a wide spectrum of deformable objects such as garments and food items with high-fidelity dynamics and realistic interactions, supports multiple robotic embodiments with emphasis on low-cost robots, and serves as a scalable testbed for end-to-end evaluation of household tasks.
Significance. If the fidelity and realism claims are substantiated with quantitative evidence, LeHome could provide a valuable, accessible testbed for household robotics research, particularly for manipulation tasks involving complex deformables on resource-constrained hardware where existing simulators fall short.
major comments (2)
- [Abstract] Abstract: The central claim that LeHome offers 'high-fidelity dynamics and realistic interactions that existing simulators struggle to simulate accurately' is load-bearing for the contribution but is presented without any quantitative validation metrics, error comparisons to real-world data, or head-to-head benchmarks against prior simulators. This leaves the superiority assertion unsupported.
- The manuscript positions the physics engine and object models as achieving meaningfully higher fidelity for garments, food, and other household deformables, yet provides no implementation details, material parameter identification results, or standardized deformation task scores to allow assessment of whether the dynamics are measurably more realistic under equivalent conditions.
minor comments (1)
- [Abstract] The abstract mentions a webpage but the manuscript would benefit from explicit statements on code availability, environment installation, and example task implementations to facilitate reproducibility.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and detailed comments. We agree that the claims regarding high-fidelity dynamics require stronger quantitative support and will revise the manuscript to include additional validation evidence and implementation details.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that LeHome offers 'high-fidelity dynamics and realistic interactions that existing simulators struggle to simulate accurately' is load-bearing for the contribution but is presented without any quantitative validation metrics, error comparisons to real-world data, or head-to-head benchmarks against prior simulators. This leaves the superiority assertion unsupported.
Authors: We acknowledge that the abstract makes a strong claim that is not fully substantiated by quantitative evidence in the current version. The manuscript includes qualitative comparisons and task-level success rates in the experiments, but we agree these do not constitute rigorous validation. In the revised manuscript we will add a dedicated validation subsection reporting real-world deformation error metrics (e.g., point-wise tracking error under gravity and manipulation) and direct benchmark comparisons against MuJoCo and PyBullet on standardized household tasks. revision: yes
-
Referee: [—] The manuscript positions the physics engine and object models as achieving meaningfully higher fidelity for garments, food, and other household deformables, yet provides no implementation details, material parameter identification results, or standardized deformation task scores to allow assessment of whether the dynamics are measurably more realistic under equivalent conditions.
Authors: We agree that the current manuscript lacks sufficient implementation transparency and quantitative fidelity assessment. The physics engine description is high-level and material parameters are not reported. In the revision we will expand the methods section with the specific constitutive models used, the procedure for identifying material parameters from real-world measurements, and standardized deformation scores (e.g., normalized mean squared error on vertex positions for garment folding and food cutting tasks) to enable direct comparison with prior simulators under matched conditions. revision: yes
Circularity Check
No circularity: paper is a simulator introduction without derivations or self-referential predictions
full rationale
The manuscript introduces LeHome as a new simulation environment for deformable objects. It asserts high-fidelity dynamics and superiority over prior simulators but contains no equations, fitted parameters, predictions derived from inputs, or load-bearing self-citations that reduce to the paper's own claims by construction. The central assertions are empirical or implementation claims, not a derivation chain. No steps match any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
Johan Bjorck, Fernando Casta ˜neda, Nikita Cherniadev, Xingye Da, Runyu Ding, Linxi Fan, Yu Fang, Dieter Fox, Fengyuan Hu, Spencer Huang, et al. Gr00t n1: An open foundation model for generalist humanoid robots.arXiv preprint arXiv:2503.14734, 2025
work page internal anchor Pith review arXiv 2025
-
[2]
Kevin Black, Noah Brown, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, Lachy Groom, Karol Hausman, Brian Ichter, et al.pi 0: A vision-language-action flow model for general robot control.arXiv preprint arXiv:2410.24164, 2024
work page internal anchor Pith review arXiv 2024
-
[3]
Lerobot: State-of-the-art machine learning for real-world robotics in pytorch
Remi Cadene, Simon Alibert, Alexander Soare, Quentin Gallouedec, Adil Zouitine, Steven Palma, Pepijn Kooijmans, Michel Aractingi, Mustafa Shukor, Dana Aubakirova, Martino Russi, Francesco Ca- puano, Caroline Pascal, Jade Choghari, Jess Moss, and Thomas Wolf. Lerobot: State-of-the-art machine learning for real-world robotics in pytorch. https://github.com/...
2024
-
[4]
Tianxing Chen, Zanxin Chen, Baijun Chen, Zijian Cai, Yibin Liu, Qiwei Liang, Zixuan Li, Xianliang Lin, Yiheng Ge, Zhenyu Gu, et al. Robotwin 2.0: A scalable data generator and benchmark with strong domain randomization for robust bimanual robotic manipulation.arXiv preprint arXiv:2506.18088, 2025
work page internal anchor Pith review arXiv 2025
-
[5]
Diffusion policy: Visuomotor policy learning via action diffusion.The International Journal of Robotics Research, page 02783649241273668, 2023
Cheng Chi, Zhenjia Xu, Siyuan Feng, Eric Cousineau, Yilun Du, Benjamin Burchfiel, Russ Tedrake, and Shuran Song. Diffusion policy: Visuomotor policy learning via action diffusion.The International Journal of Robotics Research, page 02783649241273668, 2023
2023
-
[6]
enactic. OpenArm. https://github.com/enactic/openarm, 2025
2025
-
[7]
Zipeng Fu, Tony Z Zhao, and Chelsea Finn. Mobile aloha: Learning bimanual mobile manipulation with low-cost whole-body teleopera- tion.arXiv preprint arXiv:2401.02117, 2024
-
[8]
Haoran Geng, Feishi Wang, Songlin Wei, Yuyang Li, Bangjun Wang, Boshi An, Charlie Tianyue Cheng, Haozhe Lou, Peihao Li, Yen- Jen Wang, et al. Roboverse: Towards a unified platform, dataset and benchmark for scalable and generalizable robot learning.arXiv preprint arXiv:2504.18904, 2025
-
[9]
Arnold: A benchmark for language-grounded task learning with continuous states in realistic 3d scenes
Ran Gong, Jiangyong Huang, Yizhou Zhao, Haoran Geng, Xiaofeng Gao, Qingyang Wu, Wensi Ai, Ziheng Zhou, Demetri Terzopoulos, Song-Chun Zhu, et al. Arnold: A benchmark for language-grounded task learning with continuous states in realistic 3d scenes. InICCV, 2023
2023
-
[10]
Flingbot: The unreasonable effectiveness of dynamic manipulation for cloth unfolding
Huy Ha and Shuran Song. Flingbot: The unreasonable effectiveness of dynamic manipulation for cloth unfolding. InConference on Robot Learning, pages 24–33. PMLR, 2022
2022
-
[11]
Eric Heiden, Miles Macklin, Yashraj Narang, Dieter Fox, Animesh Garg, and Fabio Ramos. Disect: A differentiable simulation engine for autonomous robotic cutting.arXiv preprint arXiv:2105.12244, 2021
-
[12]
Zhiao Huang, Yuanming Hu, Tao Du, Siyuan Zhou, Hao Su, Joshua B Tenenbaum, and Chuang Gan. Plasticinelab: A soft-body ma- nipulation benchmark with differentiable physics.arXiv preprint arXiv:2104.03311, 2021
-
[13]
Rlbench: The robot learning benchmark & learning environment
Stephen James, Zicong Ma, David Rovick Arrojo, and Andrew J Davi- son. Rlbench: The robot learning benchmark & learning environment. IEEE Robotics and Automation Letters, 5(2):3019–3026, 2020
2020
-
[14]
Yunfan Jiang, Ruohan Zhang, Josiah Wong, Chen Wang, Yanjie Ze, Hang Yin, Cem Gokmen, Shuran Song, Jiajun Wu, and Li Fei-Fei. Be- havior robot suite: Streamlining real-world whole-body manipulation for everyday household activities.arXiv preprint arXiv:2503.05652, 2025
-
[15]
igibson 2.0: Object-centric simulation for robot learning of everyday household tasks
Chengshu Li, Fei Xia, Roberto Mart ´ın-Mart´ın, Michael Lingelbach, Sanjana Srivastava, Bokui Shen, Kent Vainio, Cem Gokmen, Gokul Dharan, Tanish Jain, et al. igibson 2.0: Object-centric simulation for robot learning of everyday household tasks.arXiv preprint arXiv:2108.03272, 2021
-
[16]
Behavior-1k: A benchmark for embodied ai with 1,000 everyday activities and realistic simulation
Chengshu Li, Ruohan Zhang, Josiah Wong, Cem Gokmen, San- jana Srivastava, Roberto Mart ´ın-Mart´ın, Chen Wang, Gabrael Levine, Michael Lingelbach, Jiankai Sun, et al. Behavior-1k: A benchmark for embodied ai with 1,000 everyday activities and realistic simulation. In Conference on Robot Learning, pages 80–93. PMLR, 2023
2023
-
[17]
Sizhe Li, Zhiao Huang, Tao Du, Hao Su, Joshua B Tenenbaum, and Chuang Gan. Contact points discovery for soft-body manipulations with differentiable physics.arXiv preprint arXiv:2205.02835, 2022
-
[18]
Xingyu Lin, Zhiao Huang, Yunzhu Li, Joshua B Tenenbaum, David Held, and Chuang Gan. Diffskill: Skill abstraction from differentiable physics for deformable object manipulations with tools.arXiv preprint arXiv:2203.17275, 2022
-
[19]
Softgym: Benchmarking deep reinforcement learning for deformable object manipulation
Xingyu Lin, Yufei Wang, Jake Olkin, and David Held. Softgym: Benchmarking deep reinforcement learning for deformable object manipulation. InConference on Robot Learning, 2020
2020
-
[20]
Libero: Benchmarking knowledge transfer for lifelong robot learning.NeurIPS, 2023
Bo Liu, Yifeng Zhu, Chongkai Gao, Yihao Feng, Qiang Liu, Yuke Zhu, and Peter Stone. Libero: Benchmarking knowledge transfer for lifelong robot learning.NeurIPS, 2023
2023
-
[21]
Garment- lab: A unified simulation and benchmark for garment manipulation
Haoran Lu, Ruihai Wu, Yitong Li, Sijie Li, Ziyu Zhu, Chuanruo Ning, Yan Zhao, Longzan Luo, Yuanpei Chen, and Hao Dong. Garment- lab: A unified simulation and benchmark for garment manipulation. NeurIPS, 2024
2024
-
[22]
Robotwin: Dual-arm robot benchmark with generative digital twins
Yao Mu, Tianxing Chen, Zanxin Chen, Shijia Peng, Zhiqian Lan, Zeyu Gao, Zhixuan Liang, Qiaojun Yu, Yude Zou, Mingkun Xu, Lunkai Lin, Zhiqiang Xie, Mingyu Ding, and Ping Luo. Robotwin: Dual-arm robot benchmark with generative digital twins. InCVPR, 2025
2025
-
[23]
RoboCasa: Large-Scale Simulation of Everyday Tasks for Generalist Robots
Soroush Nasiriany, Abhiram Maddukuri, Lance Zhang, Adeet Parikh, Aaron Lo, Abhishek Joshi, Ajay Mandlekar, and Yuke Zhu. Robocasa: Large-scale simulation of everyday tasks for generalist robots.arXiv preprint arXiv:2406.02523, 2024
work page internal anchor Pith review arXiv 2024
-
[24]
Learning to Re- arrange Deformable Cables, Fabrics, and Bags with Goal-Conditioned Transporter Networks
Daniel Seita, Pete Florence, Jonathan Tompson, Erwin Coumans, Vikas Sindhwani, Ken Goldberg, and Andy Zeng. Learning to Re- arrange Deformable Cables, Fabrics, and Bags with Goal-Conditioned Transporter Networks. InICRA, 2021
2021
-
[25]
Haochen Shi, Huazhe Xu, Samuel Clarke, Yunzhu Li, and Jiajun Wu. Robocook: Long-horizon elasto-plastic object manipulation with diverse tools.arXiv preprint arXiv:2306.14447, 2023
-
[26]
SmolVLA: A Vision-Language-Action Model for Affordable and Efficient Robotics
Mustafa Shukor, Dana Aubakirova, Francesco Capuano, Pepijn Kooij- mans, Steven Palma, Adil Zouitine, Michel Aractingi, Caroline Pascal, Martino Russi, Andres Marafioti, et al. Smolvla: A vision-language- action model for affordable and efficient robotics.arXiv preprint arXiv:2506.01844, 2025
work page internal anchor Pith review arXiv 2025
-
[27]
SIGRobotics-UIUC. Lekiwi. https://github.com/SIGRobotics-UIUC/ LeKiwi, 2025
2025
-
[28]
Habitat 2.0: Training home assistants to rearrange their habitat.NeurIPS, 2021
Andrew Szot, Alexander Clegg, Eric Undersander, Erik Wijmans, Yili Zhao, John Turner, Noah Maestre, Mustafa Mukadam, Devendra Singh Chaplot, Oleksandr Maksymets, et al. Habitat 2.0: Training home assistants to rearrange their habitat.NeurIPS, 2021
2021
-
[29]
Stone Tao, Fanbo Xiang, Arth Shukla, Yuzhe Qin, Xander Hinrichsen, Xiaodi Yuan, Chen Bao, Xinsong Lin, Yulin Liu, Tse-kai Chan, et al. Maniskill3: Gpu parallelized robotics simulation and rendering for generalizable embodied ai.arXiv preprint arXiv:2410.00425, 2024
-
[30]
Et-seed: Efficient trajectory-level se(3) equivari- ant diffusion policy, 2025
Chenrui Tie, Yue Chen, Ruihai Wu, Boxuan Dong, Zeyi Li, Chongkai Gao, and Hao Dong. Et-seed: Efficient trajectory-level se(3) equivari- ant diffusion policy, 2025
2025
-
[31]
Xlerobot: A practical low-cost household dual-arm mobile robot design for general manipulation
Gaotian Wang and Zhuoyi Lu. Xlerobot: A practical low-cost household dual-arm mobile robot design for general manipulation. https://github.com/Vector-Wangel/XLeRobot, 2025
2025
-
[32]
Thin-shell object manipulations with differentiable physics simulations
Yian Wang, Juntian Zheng, Zhehuan Chen, Zhou Xian, Gu Zhang, Chao Liu, and Chuang Gan. Thin-shell object manipulations with differentiable physics simulations. InICLR, 2023
2023
-
[33]
arXiv preprint arXiv:2505.11032 , year=
Yuran Wang, Ruihai Wu, Yue Chen, Jiarui Wang, Jiaqi Liang, Ziyu Zhu, Haoran Geng, Jitendra Malik, Pieter Abbeel, and Hao Dong. Dexgarmentlab: Dexterous garment manipulation environment with generalizable policy.arXiv preprint arXiv:2505.11032, 2025
-
[34]
Zhou Xian, Bo Zhu, Zhenjia Xu, Hsiao-Yu Tung, Antonio Torralba, Katerina Fragkiadaki, and Chuang Gan. Fluidlab: A differentiable environment for benchmarking complex fluid manipulation.arXiv preprint arXiv:2303.02346, 2023
-
[35]
Unifolding: Towards sample-efficient, scalable, and generalizable robotic garment folding.CoRL, 2023
Han Xue, Yutong Li, Wenqiang Xu, Huanyu Li, Dongzhe Zheng, and Cewu Lu. Unifolding: Towards sample-efficient, scalable, and generalizable robotic garment folding.CoRL, 2023
2023
-
[36]
Homerobot: Open- vocabulary mobile manipulation.CoRL, 2023
Sriram Yenamandra, Arun Ramachandran, Karmesh Yadav, Austin Wang, Mukul Khanna, Theophile Gervet, Tsung-Yen Yang, Vidhi Jain, Alexander William Clegg, John Turner, et al. Homerobot: Open- vocabulary mobile manipulation.CoRL, 2023
2023
-
[37]
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
Tony Z Zhao, Vikash Kumar, Sergey Levine, and Chelsea Finn. Learning fine-grained bimanual manipulation with low-cost hardware. arXiv preprint arXiv:2304.13705, 2023
work page internal anchor Pith review arXiv 2023
-
[38]
Clothesnet: An information- rich 3d garment model repository with simulated clothes environment, 2023
Bingyang Zhou, Haoyu Zhou, Tianhai Liang, Qiaojun Yu, Siheng Zhao, Yuwei Zeng, Jun Lv, Siyuan Luo, Qiancai Wang, Xinyuan Yu, Haonan Chen, Cewu Lu, and Lin Shao. Clothesnet: An information- rich 3d garment model repository with simulated clothes environment, 2023
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.