Recognition: unknown
WSINDy for Model Predictive Control with Applications to Fusion, Drones, and Chaos
Pith reviewed 2026-05-08 06:59 UTC · model grok-4.3
The pith
WSINDYc integrated with model predictive control identifies governing dynamics robustly from noisy data for improved control performance.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes that embedding WSINDYc within MPC produces models that remain effective for control despite high noise levels in the data, yielding longer prediction horizons, lower tracking errors, more reliable obstacle clearance, and lower optimization costs across tokamak, drone, Lorenz, and aircraft examples.
What carries the argument
WSINDYc, which modifies the weak-form sparse identification method to include actuation input terms in the candidate function library for learning both the system and its response to controls.
If this is right
- Longer prediction horizons become usable in MPC without loss of accuracy.
- Trajectory tracking errors decrease compared to benchmark data-driven methods.
- Obstacle clearance in drone scenarios becomes more reliable.
- Overall MPC costs are lower when operating on noisy measurements.
Where Pith is reading between the lines
- The approach could apply to additional noisy control tasks such as autonomous driving or process control.
- Sparsity in the learned models may enable faster computation for real-time use.
- Testing with time-dependent or uncertain parameters would reveal further limitations or strengths.
Load-bearing premise
The model identified by WSINDYc from noisy data remains sufficiently accurate over the MPC prediction horizon for the chosen applications.
What would settle it
Increasing noise in the identification data until incorrect terms are selected by WSINDYc and checking if MPC performance then falls below that of alternative methods.
Figures










read the original abstract
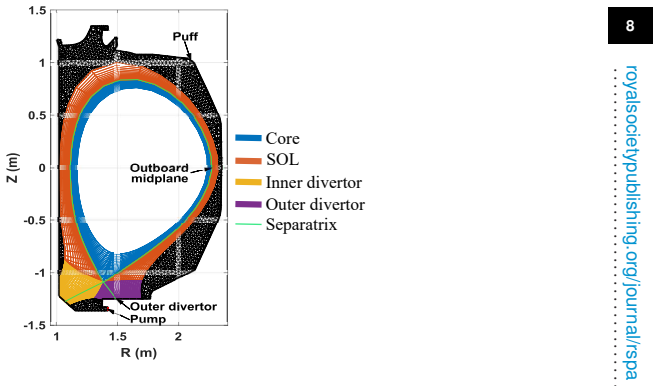
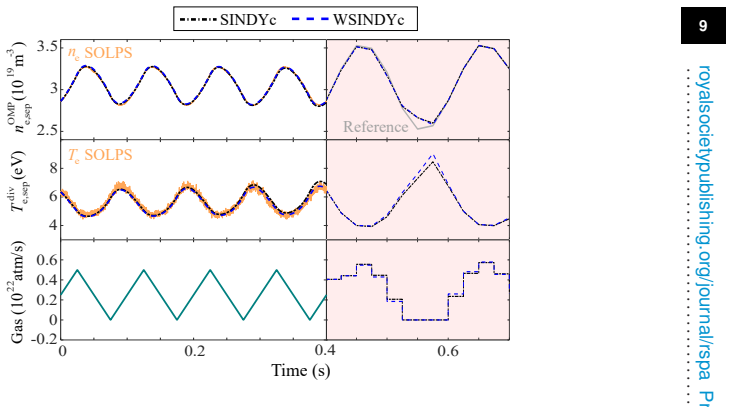
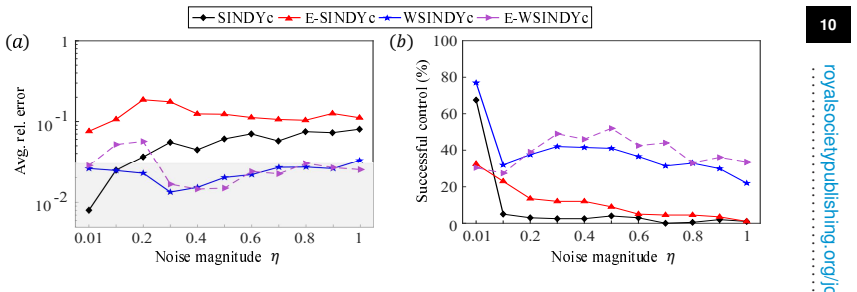
The control of complex dynamical systems remains a fundamental challenge in science and engineering, where strong nonlinearities, the presence of noise, and computational constraints often pose significant obstacles in traditional control approaches. Recent advances in data-driven methods, particularly system identification techniques, have shown a powerful alternative by providing fast, parsimonious, interpretable models that are well-suited for model predictive control (MPC). Building on these developments, the present article embeds WSINDy with actuation inputs (WSINDYc) within a MPC framework. Compared to benchmark data-driven methods, WSINDYc enables a more robust identification of the governing dynamics, particularly in the presence of high noise levels, resulting in more accurate and efficient control. The capabilities of the proposed WSINDY-MPC framework are demonstrated on a range of problems, including a tokamak plasma boundary model that includes main ion gas puff actuation, drone tracking and collision avoidance, the chaotic Lorenz system, and a simplified flight control model for an F-8 aircraft. The proposed framework achieves superior performance in the presence of noise, enabling longer prediction horizons, lower trajectory tracking error, and a more reliable obstacle clearance, while simultaneously achieving lower MPC cost values compared to the baseline methods.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces WSINDYc (WSINDy with actuation inputs) and embeds it in an MPC framework for data-driven control of nonlinear systems. It claims that WSINDYc yields more robust identification of governing equations from noisy measurements than benchmark methods, enabling longer prediction horizons, lower tracking errors, better obstacle clearance, and reduced MPC costs. These claims are illustrated on a tokamak plasma boundary model with gas-puff actuation, drone tracking/collision avoidance, the chaotic Lorenz system, and an F-8 aircraft flight model.
Significance. If the central performance claims are supported by explicit verification that the identified models maintain bounded multi-step prediction error over the MPC horizon, the work would offer a practical, parsimonious route to robust data-driven MPC for noisy nonlinear systems. The breadth of the four test cases (including a fusion-relevant tokamak model and chaotic dynamics) would strengthen the evidence for applicability beyond single benchmarks.
major comments (1)
- The central claim requires that WSINDYc-identified models remain sufficiently accurate over the MPC prediction horizon under noise. The applications demonstrate lower closed-loop tracking error and cost, but the manuscript does not report separate open-loop multi-step prediction error metrics (e.g., normalized RMSE over the horizon length) for the WSINDYc models versus baselines at the noise levels used. In the Lorenz and tokamak sections, this separation is needed to confirm that gains originate from identification robustness rather than cost-function tuning or constraint handling, as small coefficient perturbations can produce exponential divergence in these regimes.
minor comments (3)
- Abstract: the statements of 'superior performance' and 'more accurate and efficient control' should be accompanied by at least one quantitative summary statistic (e.g., percentage reduction in tracking error or extension of feasible horizon) with reference to the relevant figure or table.
- Ensure all comparison plots include explicit noise-level annotations, error bars or shaded regions indicating variability across trials, and clear specification of the baseline methods (e.g., which SINDy variant or neural-network identifier is used).
- Provide a brief sensitivity analysis or table showing how WSINDYc hyper-parameters (library size, threshold, regularization) affect both identification accuracy and closed-loop MPC cost for at least one application.
Simulated Author's Rebuttal
We thank the referee for the careful reading and the recommendation for major revision. The central concern is well-taken: while closed-loop metrics are the ultimate test of the WSINDYc-MPC framework, separate open-loop multi-step prediction errors would more clearly isolate the contribution of improved identification robustness. We will address this directly in the revision.
read point-by-point responses
-
Referee: The central claim requires that WSINDYc-identified models remain sufficiently accurate over the MPC prediction horizon under noise. The applications demonstrate lower closed-loop tracking error and cost, but the manuscript does not report separate open-loop multi-step prediction error metrics (e.g., normalized RMSE over the horizon length) for the WSINDYc models versus baselines at the noise levels used. In the Lorenz and tokamak sections, this separation is needed to confirm that gains originate from identification robustness rather than cost-function tuning or constraint handling, as small coefficient perturbations can produce exponential divergence in these regimes.
Authors: We agree that explicit open-loop multi-step prediction metrics would strengthen the manuscript. Although the closed-loop results (tracking error, cost, obstacle clearance) already demonstrate practical utility, they do not fully separate model quality from controller tuning. In the revised manuscript we will add normalized RMSE (or equivalent) for open-loop multi-step predictions over the exact MPC horizons used, evaluated at the noise levels reported in each example. These will be included for WSINDYc and all baselines in the Lorenz and tokamak sections (and, space permitting, the drone and aircraft cases). We will also note that the identified models keep these errors bounded over the horizon, consistent with the longer prediction horizons that become feasible. This addition directly addresses the referee’s request without changing the core claims or experimental setup. revision: yes
Circularity Check
No significant circularity; WSINDy-MPC is an applied framework with independent empirical validation
full rationale
The paper presents WSINDYc as an existing data-driven identification technique (from prior literature) embedded into an MPC loop, then demonstrates closed-loop performance on four distinct applications (tokamak, drone, Lorenz, F-8). No derivation step equates a claimed prediction or uniqueness result to a fitted quantity defined by the same equations; the central claims rest on numerical experiments comparing tracking error, cost, and robustness under noise, which are externally falsifiable against the benchmark methods. Self-citations to the WSINDy method itself are not load-bearing for the MPC performance results, as the identification step uses standard sparse regression on observed trajectories and the MPC uses the resulting model as a black-box predictor. The weakest assumption (model fidelity over the horizon) is acknowledged as an empirical question rather than a definitional identity.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
1999 System Identification: Theory for the User
Ljung L. 1999 System Identification: Theory for the User . Upper Saddle River, NJ: Prentice Hall PTR 2nd edition
1999
-
[2]
2024 PINNacle: A Comprehensive Benchmark of Physics-Informed Neural Netw orks for Solving PDEs
Hao Z, Yao J, Su C, Su H, Wang Z, Lu F, Xia Z, Zhang Y , Liu S, Lu L, Zhu J. 2024 PINNacle: A Comprehensive Benchmark of Physics-Informed Neural Netw orks for Solving PDEs. In Globerson A, Mackey L, Belgrave D, Fan A, Paquet U, Tomczak J, Zhang C, editors, Advances in Neural Information Processing Systems vol. 37 pp. 76721–76774. Curran Associates, Inc
2024
-
[3]
Strogatz SH. 2015 Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering. CRC Press. 2nd edition. ( 10.1201/9780429492563)
-
[4]
2018 Inferring Collective Dynamical States from Widely Unobserved Systems
Wilting J, Priesemann V . 2018 Inferring Collective Dynamical States from Widely Unobserved Systems. Nature Communications 9, 2325. (10.1038/s41467-018-04725-4)
-
[5]
Berkooz G, Holmes P , Lumley JL. 1993 The Proper Orthogonal Decomposition in the Analysis of Turbulent Flows. Annual Review of Fluid Mechanics 25, 539–575. (10.1146/annurev .fl.25.010193.002543)
-
[6]
Lee K, Carlberg KT. 2020 Model Reduction of Dynamical Syst ems on Nonlinear Manifolds Using Deep Convolutional Autoencoders. Journal of Computational Physics 404, 108973. (10.1016/j.jcp.2019.108973) 21royalsocietypublishing.org/journal/rspa Proc R Soc A 0000000
-
[7]
2023 Discovering Causal Relation s and Equations from Data
Camps-Valls G, Gerhardus A, Ninad U, Varando G, Martius G, Balaguer-Ballester E, Vinuesa R, Diaz E, Zanna L, Runge J. 2023 Discovering Causal Relation s and Equations from Data. Physics Reports 1044, 1–68. ( 10.1016/j.physrep.2023.10.005)
-
[8]
1985 An Eigensystem Realization Algor ithm for Modal Parameter Identification and Model Reduction
Juang JN, Pappa RS. 1985 An Eigensystem Realization Algor ithm for Modal Parameter Identification and Model Reduction. Journal of Guidance, Control, and Dynamics 8, 620–627. (10.2514/3.20031)
-
[9]
Schmidt M, Lipson H. 2009 Distilling Free-Form Natural La ws from Experimental Data. Science 324, 81–85. ( 10.1126/science.1165893)
-
[10]
Schmid PJ. 2010 Dynamic Mode Decomposition of Numerical and Experimental Data. Journal of Fluid Mechanics 656, 5–28. ( 10.1017/S0022112010001217)
-
[11]
Tu JH, Rowley CW, Luchtenburg DM, Brunton SL, Kutz JN. 201 4 On Dynamic Mode Decomposition: Theory and Applications. Journal of Computational Dynamics 1, 391–421. (10.3934/jcd.2014.1.391)
-
[12]
2018 Neu ral Ordinary Differential Equations
Chen TQ, Rubanova Y , Bettencourt J, Duvenaud DK. 2018 Neu ral Ordinary Differential Equations. In Advances in Neural Information Processing Systems vol. 31
2018
-
[13]
Hidden physics models: Machine learning of nonlinear partial differential equations,
Raissi M, Karniadakis GE. 2018 Hidden Physics Models: Ma chine Learning of Nonlinear Partial Differential Equations. Journal of Computational Physics 357, 125–141. (10.1016/j.jcp.2017.11.039)
-
[14]
2024 KAN 2.0: Kolm ogorov-Arnold Networks Meet Science
Liu Z, Ma P , Wang Y , Matusik W, Tegmark M. 2024 KAN 2.0: Kolm ogorov-Arnold Networks Meet Science
2024
-
[15]
Cenedese M, Axås J, Bäuerlein B, A vila K, Haller G. 2022 Da ta-Driven Modeling and Prediction of Non-Linearizable Dynamics via Spectral Subm anifolds. Nature Communications 13, 872. ( 10.1038/s41467-022-28518-y)
-
[16]
1987 Equations of Motion fro m a Data Series
Crutchfield JP , McNamara BS. 1987 Equations of Motion fro m a Data Series. Complex Systems 1, 417–452
1987
-
[17]
Wang WX, Yang R, Lai YC, Kovanis V , Grebogi C. 2011 Predict ing Catastrophes in Nonlinear Dynamical Systems by Compressive Sensing. Physical Review Letters 106, 154101. (10.1103/PhysRevLett.106.154101)
-
[18]
1974 A New Look at the Statistical Model Identifi cation
Akaike H. 1974 A New Look at the Statistical Model Identifi cation. IEEE T ransactions on Automatic Control 19, 716–723. ( 10.1109/TAC.1974.1100705)
-
[19]
Abhimanyu Das, Weihao Kong, Rajat Sen, and Yichen Zhou
Brunton SL, Proctor JL, Kutz JN. 2016 Discovering Govern ing Equations from Data by Sparse Identification of Nonlinear Dynamical Systems. Proceedings of the National Academy of Sciences 113, 3932–3937. ( 10.1073/pnas.1517384113)
-
[20]
2021 Weak SINDy: Galerkin-Based Data-Driven Model Selection
Messenger DA, Bortz DM. 2021 Weak SINDy: Galerkin-Based Data-Driven Model Selection. Multiscale Modeling & Simulation 19, 1474–1497. ( 10.1137/20M1343166)
-
[21]
2016 Inferrin g Biological Networks by Sparse Identification of Nonlinear Dynamics
Mangan NM, Brunton SL, Proctor JL, Kutz JN. 2016 Inferrin g Biological Networks by Sparse Identification of Nonlinear Dynamics. IEEE T ransactions on Molecular, Biological and Multi-Scale Communications 2, 52–63. ( 10.1109/TMBMC.2016.2633265)
-
[22]
2016 Sparse Identific ation for Nonlinear Optical Communication Systems: SINO Method
Sorokina M, Sygletos S, Turitsyn S. 2016 Sparse Identific ation for Nonlinear Optical Communication Systems: SINO Method. Optics Express 24, 30433. ( 10.1364/OE.24.030433)
-
[23]
The Journal of Chemical Physics148(24), 241723 (2018) https://doi
Boninsegna L, Nüske F, Clementi C. 2018 Sparse Learning o f Stochastic Dynamical Equations. The Journal of Chemical Physics 148, 241723. ( 10.1063/1.5018409)
-
[24]
Lai Z, Nagarajaiah S. 2019 Sparse Structural System Iden tification Method for Nonlinear Dynamic Systems with Hysteresis/Inelastic Behavior. Mechanical Systems and Signal Processing 117, 813–842. ( 10.1016/j.ymssp.2018.08.033)
-
[25]
2021 Modeli ng and Prediction of the Transmission Dynamics of COVID-19 Based on the SINDy-LM Met hod
Jiang YX, Xiong X, Zhang S, Wang JX, Li JC, Du L. 2021 Modeli ng and Prediction of the Transmission Dynamics of COVID-19 Based on the SINDy-LM Met hod. Nonlinear Dynamics 105, 2775–2794. ( 10.1007/s11071-021-06707-6)
-
[26]
2021 Sparse Ident ification of Nonlinear Dynamics with Low-Dimensionalized Flow Representations
Fukami K, Murata T, Zhang K, Fukagata K. 2021 Sparse Ident ification of Nonlinear Dynamics with Low-Dimensionalized Flow Representations. Journal of Fluid Mechanics 926, A10. (10.1017/jfm.2021.697)
-
[27]
Brunton SL, Proctor JL, Kutz JN. 2016 Sparse Identificati on of Nonlinear Dynamics with Control (SINDYc). IF AC-PapersOnLine49, 710–715. ( 10.1016/j.ifacol.2016.10.249)
-
[28]
2021 A Review of PID Control, Tuning Methods and Applications
Borase RP , Maghade DK, Sondkar SY , Pawar SN. 2021 A Review of PID Control, Tuning Methods and Applications. International Journal of Dynamics and Control 9, 818–827. (10.1007/s40435-020-00665-4)
-
[29]
2019 Data-Driven Science and Engineering: Machine Learning, Dy namical Systems, and Control
Brunton SL, Kutz JN. 2019 Data-Driven Science and Engineering: Machine Learning, Dy namical Systems, and Control. Cambridge University Press 1 edition. ( 10.1017/9781108380690) 22royalsocietypublishing.org/journal/rspa Proc R Soc A 0000000
-
[30]
2026 Control of Dynamical Systems with Neura l Networks
Böttcher L. 2026 Control of Dynamical Systems with Neura l Networks. Nonlinear Dynamics 114, 79. ( 10.1007/s11071-025-11937-z)
-
[31]
García CE, Prett DM, Morari M. 1989 Model Predictive Cont rol: Theory and Practice—A Survey .Automatica 25, 335–348. ( 10.1016/0005-1098(89)90002-2)
-
[32]
Schwenzer M, Ay M, Bergs T, Abel D. 2021 Review on Model Pre dictive Control: An Engineering Perspective. The International Journal of Advanced Manufacturing T echn ology 117, 1327–1349. ( 10.1007/s00170-021-07682-3)
-
[33]
2025 Machine Learn ing for Sparse Nonlinear Modeling and Control
Brunton SL, Zolman N, Kutz JN, Fasel U. 2025 Machine Learn ing for Sparse Nonlinear Modeling and Control. Annual Review of Control, Robotics, and Autonomous Systems . (10.1146/annurev-control-030123-015238)
-
[34]
2018 Sparse Identification of Nonlinear Dynamics for Model Predictive Control in the Low-Data Limit
Kaiser E, Kutz JN, Brunton SL. 2018 Sparse Identification of Nonlinear Dynamics for Model Predictive Control in the Low-Data Limit. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences 474, 20180335. ( 10.1098/rspa.2018.0335)
-
[35]
2021 SI NDy with Control: A Tutorial
Fasel U, Kaiser E, Kutz JN, Brunton BW, Brunton SL. 2021 SI NDy with Control: A Tutorial. In 2021 60th IEEE Conference on Decision and Control (CDC) pp. 16–21 Austin, TX, USA. IEEE. (10.1109/CDC45484.2021.9683120)
-
[36]
2021 Sparse-Identifica tion-Based Model Predictive Control of Nonlinear Two-Time-Scale Processes
Abdullah F, Wu Z, Christofides PD. 2021 Sparse-Identifica tion-Based Model Predictive Control of Nonlinear Two-Time-Scale Processes. Computers & Chemical Engineering p. 107411. (10.1016/j.compchemeng.2021.107411)
-
[37]
Abdullah F, Christofides PD. 2023 Data-Based Modeling an d Control of Nonlinear Process Systems Using Sparse Identification: An Overview of Recent R esults. Computers & Chemical Engineering 174, 108247. ( 10.1016/j.compchemeng.2023.108247)
-
[38]
Lore J, De Pascuale S, Laiu P , Russo B, Park JS, Park J, Brun ton S, Kutz J, Kaptanoglu A. 2023 Time-Dependent SOLPS-ITER Simulations of the Tokamak Plasma Boundary for Model Predictive Control Using SINDy. Nuclear Fusion 63, 046015. ( 10.1088/1741-4326/acbe0e)
-
[39]
202 5 SINDy and PD-Based UA V Dynamics Identification for MPC
Guevara BS, Varela-Aldás J, Gandolfo DC, Toibero JM. 202 5 SINDy and PD-Based UA V Dynamics Identification for MPC. Drones 9, 71. ( 10.3390/drones9010071)
-
[40]
Lee H, Ren R, Qian Y , Rosen J. 2025a Energy Reduction for We arable Pneumatic Valve System With SINDy and Time-Variant Model Predictive Contro l. IEEE/ASME T ransactions on Mechatronics 30, 862–872. ( 10.1109/tmech.2024.3458092)
-
[41]
Lee JD, Kim Y , Kim Y , Bang H. 2025b Sparse Identification of Nonlinear Dynamics- Based Model Predictive Control for Multirotor Collision A v oidance. IET Control Theory & Applications 19, e70049. ( 10.1049/cth2.70049)
-
[42]
2025 Sparse Iden tification and Nonlinear Model Predictive Control for Diesel Engine Air Path System
Yahagi S, Seto H, Yonezawa A, Kajiwara I. 2025 Sparse Iden tification and Nonlinear Model Predictive Control for Diesel Engine Air Path System. International Journal of Control, Automation and Systems 23, 620–629. ( 10.1007/s12555-024-0452-9)
-
[43]
2017 Sparse Model Selection via Integral Terms
Schaeffer H, McCalla SG. 2017 Sparse Model Selection via Integral Terms. Physical Review E 96, 023302. ( 10.1103/PhysRevE.96.023302)
-
[44]
2019 Robust and Optimal Sparse Regression for Nonlinear PDE Models
Gurevich DR, Reinbold P AK, Grigoriev RO. 2019 Robust and Optimal Sparse Regression for Nonlinear PDE Models. Chaos: An Interdisciplinary Journal of Nonlinear Science 29, 103113. (10.1063/1.5120861)
-
[45]
2019 Data-Driven Discovery of Partial Differential Equation Models with Latent Variables
Reinbold P AK, Grigoriev RO. 2019 Data-Driven Discovery of Partial Differential Equation Models with Latent Variables. Physical Review E 100, 022219. ( 10.1103/PhysRevE.100.022219)
-
[46]
2021 Weak SINDy For Partial Diffe rential Equations
Messenger DA, Bortz DM. 2021 Weak SINDy For Partial Diffe rential Equations. Journal of Computational Physics 443, 110525. ( 10.1016/j.jcp.2021.110525)
-
[47]
2022 Learning Mean-Field Equati ons from Particle Data Using WSINDy
Messenger DA, Bortz DM. 2022 Learning Mean-Field Equati ons from Particle Data Using WSINDy. Physica D: Nonlinear Phenomena 439, 133406. ( 10.1016/j.physd.2022.133406)
-
[48]
2023 Direct Estimation o f Parameters in ODE Models Using WENDy: Weak-form Estimation of Nonlinear Dynamics.Bulletin of Mathematical Biology
Bortz DM, Messenger DA, Dukic V . 2023 Direct Estimation o f Parameters in ODE Models Using WENDy: Weak-form Estimation of Nonlinear Dynamics.Bulletin of Mathematical Biology
2023
-
[49]
(10.1007/S11538-023-01208-6)
-
[50]
2024 Weak Form-Based Data -Driven Modeling: Computationally Efficient and Noise Robust Equation Learni ng and Parameter Inference
Bortz DM, Messenger DA, Tran A. 2024 Weak Form-Based Data -Driven Modeling: Computationally Efficient and Noise Robust Equation Learni ng and Parameter Inference. In Mishra S, Townsend A, editors, Numerical Analysis Meets Machine Learning , Handbook of Numerical Analysis, vol. 25, pp. 54–82. Elsevier
2024
-
[51]
2025 Weak Form Scientific Machine Learni ng: Test Function Construction for System Identification
Tran A, Bortz DM. 2025 Weak Form Scientific Machine Learni ng: Test Function Construction for System Identification. arXiv:2507.03206
-
[52]
2025 Weak-Form Mo dified Sparse Identification of Nonlinear Dynamics
López C, Naranjo Á, Salazar D, Moore KJ. 2025 Weak-Form Mo dified Sparse Identification of Nonlinear Dynamics. Journal of Computational Physics p. 114410. ( 10.1016/j.jcp.2025.114410) 23royalsocietypublishing.org/journal/rspa Proc R Soc A 0000000
-
[53]
1954 On the Analysis of Linear and Nonlinear D ynamical Systems for Transient- Response Data
Shinbrot M. 1954 On the Analysis of Linear and Nonlinear D ynamical Systems for Transient- Response Data. Technical Report NACA TN 3288 Ames Aeronauti cal Laboratory Moffett Field, CA
1954
-
[54]
Messenger D, Dwyer G, Dukic V . 2024 Weak-Form Inference f or Hybrid Dynamical Systems in Ecology .Journal of The Royal Society Interface 21, 20240376. ( 10.1098/rsif.2024.0376)
-
[55]
2025 Learning Ph ysically Interpretable Atmospheric Models From Data With WSINDy
Minor S, Messenger DA, Dukic V , Bortz DM. 2025 Learning Ph ysically Interpretable Atmospheric Models From Data With WSINDy. Journal of Geophysical Research: Machine Learning and Computation 2, e2025JH000602. (10.1029/2025JH000602)
-
[56]
Vasey G, Messenger DA, Bortz DM, Christlieb A, O’Shea B. 2 025 Influence of Initial Conditions on Data-Driven Model Identification and Informa tion Entropy for Ideal Mhd Problems. Journal of Computational Physics 524, 113719. ( 10.1016/j.jcp.2025.113719)
-
[57]
Schmid AC, Doostan A, Pourahmadian F. 2024 Ensemble WSIN Dy for Data Driven Discovery of Governing Equations from Laser-based Full-field Measure ments. arXiv:2409.20510
-
[58]
Woodall RT, Esparza CC, Gutova M, Wang M, Cunningham JJ, B rummer AB, Stine CA, Brown CC, Munson JM, Rockne RC. 2024 Model Discovery Approac h Enables Noninvasive Measurement of Intra-Tumoral Fluid Transport in Dynamic MRI. APL Bioengineering 8, 026106. (10.1063/5.0190561)
-
[59]
Fasel U, Kutz JN, Brunton BW, Brunton SL. 2022 Ensemble-S INDy: Robust Sparse Model Discovery in the Low-Data, High-Noise Limit, with Active Le arning and Control. Proceedings of the Royal Society A: Mathematical, Physical and Engineer ing Sciences 478, 20210904. (10.1098/rspa.2021.0904)
-
[60]
Chen Z, Wang W. 2025 Dynamic Modeling and Efficient Data-D riven Optimal Control for Micro Autonomous Surface V ehicles. (10.48550/arXiv .2509.06882)
work page internal anchor Pith review doi:10.48550/arxiv 2025
-
[61]
2020 De ep Model Predictive Flow Control with Limited Sensor Data and Online Learning
Bieker K, Peitz S, Brunton SL, Kutz JN, Dellnitz M. 2020 De ep Model Predictive Flow Control with Limited Sensor Data and Online Learning. Theoretical and Computational Fluid Dynamics 34, 577–591. ( 10.1007/s00162-020-00520-4)
-
[62]
2024 Model Predictive Control: Theory, Computation, and Design
Rawlings J, Mayne D, Diehl M. 2024 Model Predictive Control: Theory, Computation, and Design . Santa Barbara, CA: Nob Hill Publishing, LLC 2nd edition
2024
-
[63]
Lejarza F, Baldea M. 2022 Data-Driven Discovery of the Go verning Equations of Dynamical Systems via Moving Horizon Optimization. Scientific Reports 12, 11836. (10.1038/s41598-022-13644-w)
-
[64]
Wentz J, Doostan A. 2023 Derivative-Based SINDy (DSINDy ): Addressing the Challenge of Discovering Governing Equations from Noisy Data. Computer Methods in Applied Mechanics and Engineering 413, 116096. ( 10.1016/j.cma.2023.116096)
-
[65]
Proctor JL, Brunton SL, Kutz JN. 2016 Dynamic Mode Decomp osition with Control. SIAM Journal on Applied Dynamical Systems 15, 142–161. ( 10.1137/15M1013857)
-
[66]
1996 Learning Long-Term Dependencies in NARX Recurrent Neural Networks
Lin T, Horne BG, Tino P , Giles CL. 1996 Learning Long-Term Dependencies in NARX Recurrent Neural Networks. IEEE T ransactions on Neural Networks 7, 1329–1338. (10.1109/72.548162)
-
[67]
2016 Presentation of the New SOLPS-ITER Code Package for Tokamak Plasma Edge Mode lling
Bonnin X, Dekeyser W, Pitts R, Coster D, V oskoboynikov S, Wiesen S. 2016 Presentation of the New SOLPS-ITER Code Package for Tokamak Plasma Edge Mode lling. Plasma and Fusion Research 11, 1403102–1403102. ( 10.1585/pfr.11.1403102)
-
[68]
2010 The GRASP Multiple Micro-UA V Testbed
Michael N, Mellinger D, Lindsey Q, Kumar V . 2010 The GRASP Multiple Micro-UA V Testbed. IEEE Robotics & Automation Magazine 17, 56–65. ( 10.1109/MRA.2010.937855)
-
[69]
Liu Y , Hong H, Piprek P , Chudý P , Hu S. 2025 Data-Based Mode ling and Control of the Nonlinear Aircraft System Using Extended Implicit Sparse I dentification. IEEE T ransactions on Aerospace and Electronic Systems 61, 6928–6940. ( 10.1109/TAES.2025.3531345)
-
[70]
2023 PID Control of Quadrotor UA Vs: A Survey
Lopez-Sanchez I, Moreno-Valenzuela J. 2023 PID Control of Quadrotor UA Vs: A Survey . Annual Reviews in Control 56, 100900. ( 10.1016/j.arcontrol.2023.100900)
-
[71]
1963 Deterministic Nonperiodic Flow
Lorenz EN. 1963 Deterministic Nonperiodic Flow. Journal of the Atmospheric Sciences 20, 130–
1963
-
[72]
(10.1175/1520-0469(1963)020<0130:DNF>2.0.CO;2)
-
[73]
2023 Sparse Regression for Plasma Physics
Kaptanoglu AA, Hansen C, Lore JD, Landreman M, Brunton SL . 2023 Sparse Regression for Plasma Physics. Physics of Plasmas 30, 033906. ( 10.1063/5.0139039)
-
[74]
Osman M, Xia Y , Mahdi M, Manzoor T, Bajodah AH, Ali A, Ali A, Ahmed A. 2025 An Adaptive SINDy-Lyapunov Model Predictive Control Framewo rk for Dual-System VTOL UA Vs.International Journal of Robust and Nonlinear Control p. rnc.70272. (10.1002/rnc.70272)
-
[75]
Zhang M, Guo T, Zhang G, Liu Z, Xu W. 2024 Physics-Informed Deep Learning for Structural Vibration Identification and Its Application on a Benchmark Structure. Philosophical 24royalsocietypublishing.org/journal/rspa Proc R Soc A 0000000 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . ...
-
[76]
Automatica93, 149–160 (2018) https://doi.org/10.1016/j.automatica.2018.03.046
Korda M, Mezi´ c I. 2018 Linear Predictors for Nonlinear D ynamical Systems: Koopman Operator Meets Model Predictive Control. Automatica 93, 149–160. (10.1016/j.automatica.2018.03.046)
-
[77]
Manzoor T, Pei H, Sun Z, Cheng Z. 2022 Model Predictive Con trol Technique for Ducted Fan Aerial V ehicles Using Physics-Informed Machine Learning. Drones 7, 4. (10.3390/drones7010004)
-
[78]
2025 W ENDy for Nonlinear-in- Parameter ODEs
Rummel N, Messenger DA, Becker S, Dukic V , Bortz DM. 2025 W ENDy for Nonlinear-in- Parameter ODEs. arXiv:2502.08881
-
[79]
Reiter D, Baelmans M, Börner P . 2005 The EIRENE and B2-EIR ENE Codes. Fusion Science and T echnology47, 172–186. ( 10.13182/FST47-172)
-
[80]
2022 Yrlu/Quadrotor: Quadrotor Control, Path Planning and Trajectory Optimization
Yiren Lu. 2022 Yrlu/Quadrotor: Quadrotor Control, Path Planning and Trajectory Optimization. Zenodo. ( 10.5281/ZENODO.6796214)
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.