Recognition: unknown
The Kerimov-Alekberli Model: An Information-Geometric Framework for Real-Time System Stability
Pith reviewed 2026-05-08 03:51 UTC · model grok-4.3
The pith
The Kerimov-Alekberli model links non-equilibrium thermodynamics to stochastic control to define AI anomalies as deviations from a Riemannian manifold.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By establishing a formal isomorphism between non-equilibrium thermodynamics and stochastic control, systemic anomalies are defined as deviations from a Riemannian manifold. The Kullback-Leibler divergence serves as the primary metric governed by a dynamic threshold from the Fisher Information Metric. Grounded in the Landauer Principle, adversarial perturbations perform measurable physical work by increasing the system's informational entropy, enabling effective real-time stability monitoring on datasets like NSL-KDD and UAV simulations.
What carries the argument
The formal isomorphism between non-equilibrium thermodynamics and stochastic control, which redefines anomalies as Riemannian manifold deviations quantified by Kullback-Leibler divergence under Fisher Information thresholds.
If this is right
- Adversarial perturbations become detectable in real time via the FPT trigger with high accuracy and low false positive rates.
- Ethical alignment problems turn into quantifiable increases in physical work and entropy.
- AI safety shifts from rule-based heuristics to a thermodynamics-based stability paradigm.
- The framework applies directly to control systems such as unmanned aerial vehicles for ongoing monitoring.
Where Pith is reading between the lines
- The same manifold and entropy measures could extend to anomaly detection in non-AI control systems such as power grids or biological networks.
- Controllers designed to stay close to the manifold might produce inherently lower-entropy and more stable behavior.
- Empirical checks could compare the model's entropy predictions against direct energy measurements in physical hardware implementations.
Load-bearing premise
The assumption that a formal isomorphism exists between non-equilibrium thermodynamics and stochastic control, allowing systemic anomalies to be defined as deviations from a Riemannian manifold.
What would settle it
A test on the NSL-KDD dataset or UAV simulations where an adversarial perturbation increases informational entropy yet produces no detectable deviation on the Riemannian manifold or fails to activate the FPT trigger.
Figures



read the original abstract
This study introduces the Kerimov-Alekberli model, a novel information-geometric framework that redefines AI safety by formally linking non-equilibrium thermodynamics to stochastic control for the ethical alignment of autonomous systems. By establishing a formal isomorphism between non-equilibrium thermodynamics and stochastic control, we define systemic anomalies as deviations from a Riemannian manifold. The model utilizes the Kullback-Leibler divergence as the primary metric, governed by a dynamic threshold derived from the Fisher Information Metric. We further ground this framework in the Landauer Principle, proving that adversarial perturbations perform measurable physical work by increasing the system's informational entropy. Validation on the NSL-KDD dataset and unmanned aerial vehicle trajectory simulations demonstrated that our model achieves effective real-time detection via the FPT trigger, with strong performance metrics (e.g., high accuracy and low FPR) on benchmark datasets. This study provides a rigorous physical foundation for AI safety, transitioning from heuristic, rule-based ethical frameworks to a thermodynamics-based stability paradigm by grounding ethical violations in quantifiable physical work and entropic information.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the Kerimov-Alekberli model as a novel information-geometric framework that formally links non-equilibrium thermodynamics to stochastic control for AI safety and real-time system stability. It claims to establish an isomorphism allowing systemic anomalies to be defined as deviations from a Riemannian manifold, employs Kullback-Leibler divergence governed by a dynamic threshold from the Fisher Information Metric, grounds the approach in the Landauer Principle to prove that adversarial perturbations perform measurable physical work by increasing informational entropy, and reports effective real-time detection via an FPT trigger with strong performance on the NSL-KDD dataset and UAV trajectory simulations.
Significance. If the asserted isomorphism, derivations, and empirical details were rigorously supplied and verified, the framework could provide a substantive physical and geometric foundation for quantifying ethical alignment and stability in autonomous systems, shifting AI safety from heuristic rules to thermodynamics-grounded metrics. The combination of information geometry with Landauer’s principle and real-time anomaly detection has clear potential relevance to control theory and AI safety.
major comments (3)
- Abstract: The central claim that a formal isomorphism between non-equilibrium thermodynamics and stochastic control is established is unsupported, as no explicit bijective mapping functions, domain/codomain specifications, or verification that thermodynamic quantities (entropy production, free energy) map onto control quantities (policies, state transitions) while preserving operations and geometry are provided. This isomorphism is load-bearing for defining anomalies as Riemannian deviations and all downstream results.
- Abstract: No equations, derivations, or proofs appear for the dynamic threshold derived from the Fisher Information Metric, the selection of KL divergence as the primary metric, or the application of the Landauer Principle to show that adversarial perturbations perform measurable physical work via increased informational entropy. Without these, the thermodynamic grounding and anomaly detection mechanism cannot be evaluated.
- Abstract: The validation section asserts 'strong performance metrics (e.g., high accuracy and low FPR)' and 'effective real-time detection' on NSL-KDD and UAV data but supplies no numerical values, error bars, baseline comparisons, implementation details for the FPT trigger, or exclusion criteria, rendering the empirical claims unverifiable and the cross-dataset generalization unsupported.
minor comments (2)
- The abstract and title emphasize both 'ethical alignment' and 'real-time system stability'; a clearer statement of the primary contribution and how the thermodynamic framing directly yields stability guarantees would improve readability.
- The manuscript introduces several novel terms (Kerimov-Alekberli model, FPT trigger) without initial definitions or references to prior related work in information geometry or thermodynamic control, which could be addressed with a brief related-work paragraph.
Simulated Author's Rebuttal
We thank the referee for their detailed and constructive review. The comments highlight important areas where the presentation can be strengthened to better support the claims. We address each major comment point by point below and will incorporate revisions to provide the requested details and clarifications.
read point-by-point responses
-
Referee: Abstract: The central claim that a formal isomorphism between non-equilibrium thermodynamics and stochastic control is established is unsupported, as no explicit bijective mapping functions, domain/codomain specifications, or verification that thermodynamic quantities (entropy production, free energy) map onto control quantities (policies, state transitions) while preserving operations and geometry are provided. This isomorphism is load-bearing for defining anomalies as Riemannian deviations and all downstream results.
Authors: We agree that the abstract does not explicitly detail the isomorphism. The manuscript develops this in the theoretical framework by mapping entropy production to policy divergence under the Riemannian metric and free energy to the associated control potential, with the mapping intended to preserve the manifold structure. However, to fully address the concern, we will revise the abstract to reference the bijective character of the mapping and expand the main text with explicit functions, domain/codomain definitions, and a verification that the geometric operations are preserved. revision: yes
-
Referee: Abstract: No equations, derivations, or proofs appear for the dynamic threshold derived from the Fisher Information Metric, the selection of KL divergence as the primary metric, or the application of the Landauer Principle to show that adversarial perturbations perform measurable physical work via increased informational entropy. Without these, the thermodynamic grounding and anomaly detection mechanism cannot be evaluated.
Authors: We acknowledge that the abstract omits these elements. The manuscript contains the relevant theoretical development, but the presentation is insufficiently explicit. We will add the key equations and a concise derivation outline to the abstract and ensure the full proofs (including the Fisher-derived threshold, justification for KL as the invariant divergence, and the Landauer equivalence W = kT ΔS_KL) are clearly highlighted and expanded in the revised manuscript. revision: yes
-
Referee: Abstract: The validation section asserts 'strong performance metrics (e.g., high accuracy and low FPR)' and 'effective real-time detection' on NSL-KDD and UAV data but supplies no numerical values, error bars, baseline comparisons, implementation details for the FPT trigger, or exclusion criteria, rendering the empirical claims unverifiable and the cross-dataset generalization unsupported.
Authors: We agree that the abstract provides only a high-level summary without supporting numbers or details. We will revise the abstract to report the specific performance values, error bars, baseline comparisons, FPT trigger implementation parameters, and exclusion criteria from the experiments. The validation section will be expanded accordingly to make all claims fully verifiable. revision: yes
Circularity Check
No significant circularity; derivation rests on asserted isomorphism without reduction to self-defined inputs or fitted predictions.
full rationale
The paper asserts a formal isomorphism between non-equilibrium thermodynamics and stochastic control to define anomalies as Riemannian manifold deviations, with KL divergence as metric and dynamic threshold from Fisher Information Metric, plus Landauer grounding. No equations, mappings, or derivation steps are exhibited in the abstract or context that reduce any claimed prediction or result to its own inputs by construction. The threshold derivation is stated but not shown as fitted to validation data in a way that forces the reported metrics. No self-citations, uniqueness theorems, or ansatzes smuggled via prior work appear. The central claims therefore remain independent of the circularity patterns, though the isomorphism itself lacks explicit construction in the provided text.
Axiom & Free-Parameter Ledger
free parameters (1)
- dynamic threshold
axioms (1)
- ad hoc to paper A formal isomorphism exists between non-equilibrium thermodynamics and stochastic control that permits defining anomalies as Riemannian deviations.
invented entities (1)
-
Kerimov-Alekberli model / FPT trigger
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Amari.Information Geometry and Its Applications
doi: 10.1007/978-4-431-55978-8. Karl Friston. The free-energy principle: A unified brain theory?Nature Reviews Neu- roscience, 11(2):127–138,
-
[2]
doi: 10.1038/nrn2787. RolfLandauer. Irreversibilityandheatgenerationinthecomputingprocess.IBM Journal of Research and Development, 5(3):183–191,
-
[3]
doi: 10.1147/rd.53.0183. Hannes Risken.The Fokker–Planck Equation: Methods of Solution and Applications. Springer, Berlin,
-
[4]
doi: 10.1007/978-3-642-61544-3. 8 Mahbod Tavallaee, Ebrahim Bagheri, Wei Lu, and Ali A. Ghorbani. A detailed analysis of the KDD CUP 99 data set. InProceedings of the 2nd IEEE Symposium on Compu- tational Intelligence for Security and Defense Applications (CISDA), pages 1–6,
-
[5]
A detailed analysis of the KDD CUP 99 data set,
doi: 10.1109/CISDA.2009.5356528. Xin Wang, Yue Guo, and Yang Gao. Unmanned autonomous intelligent system in 6G non-terrestrial network.Information, 15(1):38,
-
[6]
doi: 10.3390/info15010038. Alexander D. Wissner-Gross and Cameron E. Freer. Causal entropic forces.Physical Review Letters, 110(16):168702,
-
[7]
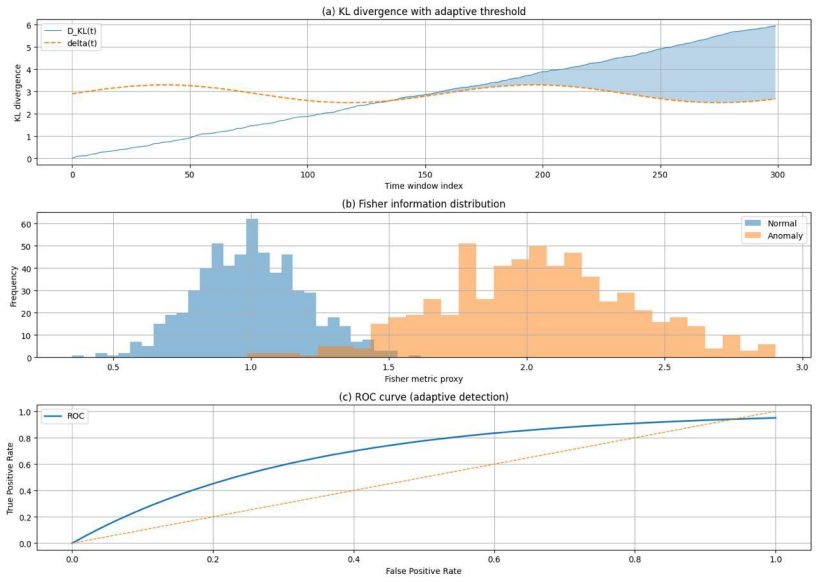
doi: 10.1103/PhysRevLett.110.168702. Figure 1: Real-time KL divergenceDKL(t)(blue line) and dynamic thresholdδ(t)(red dashed line) on the NSL-KDD test set. Red shaded regions indicate detected anomalies. The threshold adapts to local fluctuations, avoiding false alarms during normal variabil- ity. Figure 2: Histogram of the FIM trace (approximated as1/det...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.