Recognition: unknown
DOT-Sim: Differentiable Optical Tactile Simulation with Precise Real-to-Sim Physical Calibration
Pith reviewed 2026-05-07 09:42 UTC · model grok-4.3
The pith
DOT-Sim models soft optical tactile sensors with elastic physics and residual optics to enable zero-shot real-world use of simulation-trained policies.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
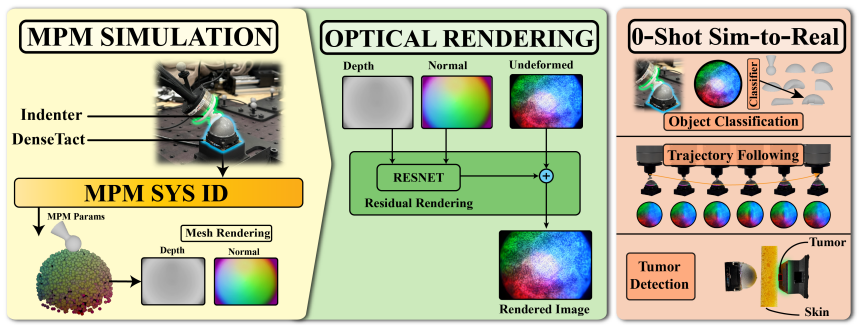
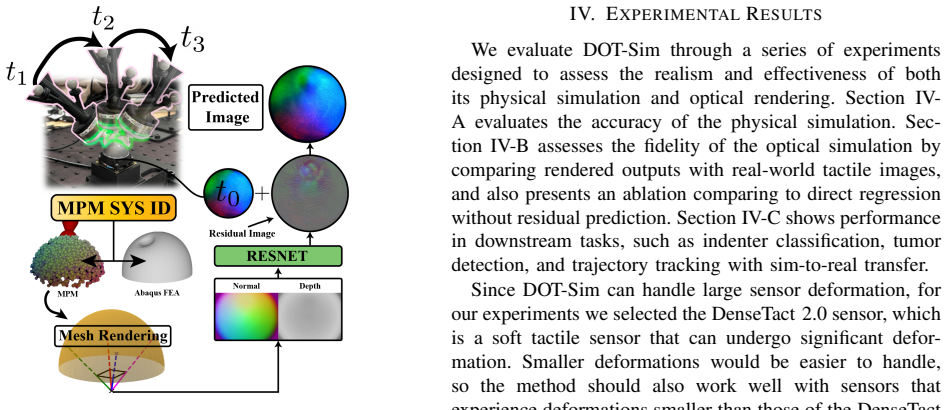
DOT-Sim captures the physical behavior of soft sensors by modeling them as elastic materials using the Material Point Method. To handle optics, it learns a residual image relative to the real-world idle state. This combination supports rapid calibration from few demonstrations and handles larger non-linear deformations than prior simplified models. Through zero-shot sim-to-real validation, it replicates physical dynamics, produces realistic optical outputs in contact scenarios, and supports direct deployment of simulation-trained models for classification and control tasks with high accuracy.
What carries the argument
The differentiable simulation framework that combines the Material Point Method for accurate elastic deformation with learned residual images for optical response simulation.
If this is right
- Simulation-trained object classifiers reach 85% accuracy when run on real challenging objects.
- Embedded tumor detection achieves 90% accuracy in real-world tests.
- Trajectory following policies trained in simulation maintain average errors below 0.9 mm on physical robots.
- The simulator accurately reproduces physical dynamics and optical outputs during contact-rich interactions.
Where Pith is reading between the lines
- If the calibration generalizes broadly, it would allow training complex tactile behaviors without collecting large real-world datasets.
- The residual image approach might extend to other types of optical or visual sensors in robotics.
- Precise physical modeling could support simulation of multi-finger or whole-hand tactile interactions.
- Direct sim-to-real transfer reduces the gap between virtual testing and physical deployment for contact tasks.
Load-bearing premise
A small number of real demonstrations can calibrate both the material parameters and the residual optical model so the simulation generalizes accurately to new objects, contact geometries, and lighting conditions.
What would settle it
Testing the simulation-trained classifier on a collection of objects and contact conditions never seen during calibration and verifying if the 85% real-world accuracy holds or declines sharply.
Figures





read the original abstract
Simulating optical tactile sensors presents significant challenges due to their high deformability and intricate optical properties. To address these issues and enable a physically accurate simulation, we propose DOT-Sim: Differentiable Optical Tactile Simulation. Unlike prior simulators that rely on simplified models of deformable sensors, DOT-Sim accurately captures the physical behavior of soft sensors by modeling them as elastic materials using the Material Point Method (MPM). DOT-Sim enables rapid calibration of optical tactile sensor simulation using a small number of demonstrations within minutes, which is substantially faster than existing methods. Compared to current baselines, our approach supports much larger and non-linear deformations. To handle the optical aspect, we propose a novel approach to simulating optical responses by learning a residual image relative to the real-world idle state. We validate the physical and visual realism of our method through a series of zero-shot sim-to-real tasks. Our experiments show that DOT-Sim (1) accurately replicates the physical dynamics of a DenseTact optical tactile sensor in reality, (2) generates realistic optical outputs in contact-rich scenarios, (3) enables direct deployment of simulation-trained classifiers in the real world, achieving 85% classification accuracy on challenging objects and 90% accuracy in embedded tumor-type detection, and (4) allows precise trajectory following with a policy trained from demonstrations in simulation, with an average error of less than 0.9 mm.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces DOT-Sim, a differentiable optical tactile simulator that models the sensor as an elastic material via the Material Point Method (MPM) for physical dynamics and learns a residual image relative to the real idle state for optical responses. It claims rapid calibration from a small number of real demonstrations (within minutes) and validates the approach via zero-shot sim-to-real transfer on tasks including object classification (85% accuracy), embedded tumor-type detection (90% accuracy), and precise trajectory following (average error <0.9 mm) using policies trained in simulation.
Significance. If the calibration generalizes as asserted, the work would be a notable contribution to tactile sensing simulation in robotics. Prior methods rely on simplified deformable models that fail on large/non-linear deformations; DOT-Sim's use of full MPM physics plus differentiability for fast parameter fitting addresses this gap and could enable more reliable sim-to-real deployment for contact-rich manipulation. The reported performance on challenging zero-shot tasks (tumor detection, sub-mm tracking) indicates practical utility if the physical fidelity holds beyond the calibration regime.
major comments (3)
- Abstract: The reported 85% object classification and 90% tumor detection accuracies are presented without quantitative error metrics on deformation tracking (e.g., no RMSE or IoU on marker positions or surface deformation fields across test contacts), which is load-bearing for the central claim that MPM parameters replicate physical dynamics accurately enough for zero-shot transfer.
- Abstract / Experiments: No ablation is provided on the residual optical model (e.g., residual-only vs. full-physics variant) or on sensitivity to calibration-set size/diversity versus test geometries, leaving open whether the sub-0.9 mm trajectory error and classification results reflect invariant physical/optical properties or overfitting to demo-specific effects.
- Abstract: The manuscript provides no details on the number of MPM material parameters fitted, the train/test split of real demonstrations, or the range of unseen contact geometries/lighting conditions in the evaluation set, which directly affects assessment of the generalization assumption from few calibration demos.
minor comments (1)
- Abstract: The description of the residual image approach would benefit from a brief statement of its input/output dimensions and training loss to clarify how it differs from prior optical tactile simulators.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback, which highlights important aspects for strengthening the presentation of our results. We address each major comment below and will incorporate clarifications and additional analyses in the revised manuscript.
read point-by-point responses
-
Referee: Abstract: The reported 85% object classification and 90% tumor detection accuracies are presented without quantitative error metrics on deformation tracking (e.g., no RMSE or IoU on marker positions or surface deformation fields across test contacts), which is load-bearing for the central claim that MPM parameters replicate physical dynamics accurately enough for zero-shot transfer.
Authors: We agree that direct quantitative metrics on deformation tracking would provide stronger supporting evidence for the physical fidelity of the MPM calibration. The zero-shot task results (particularly the sub-0.9 mm trajectory error) serve as an indirect but task-relevant validation, since inaccurate dynamics would prevent successful policy transfer and precise control. However, to directly address this point, we will add RMSE and IoU metrics on marker positions and surface deformation fields across held-out test contacts in the experiments section of the revised manuscript. revision: yes
-
Referee: Abstract / Experiments: No ablation is provided on the residual optical model (e.g., residual-only vs. full-physics variant) or on sensitivity to calibration-set size/diversity versus test geometries, leaving open whether the sub-0.9 mm trajectory error and classification results reflect invariant physical/optical properties or overfitting to demo-specific effects.
Authors: We acknowledge that explicit ablations would help isolate the contributions of the residual optical model and confirm robustness to calibration data. The residual formulation is intended to capture optical deviations while relying on MPM for the core physics; the strong zero-shot performance across diverse objects and tumor detection already suggests generalization beyond the calibration demos. To further substantiate this, we will include an ablation study comparing residual-only versus full-physics variants as well as sensitivity analysis on calibration-set size and diversity in the revised experiments. revision: yes
-
Referee: Abstract: The manuscript provides no details on the number of MPM material parameters fitted, the train/test split of real demonstrations, or the range of unseen contact geometries/lighting conditions in the evaluation set, which directly affects assessment of the generalization assumption from few calibration demos.
Authors: We will add these implementation and evaluation details to the revised manuscript to improve transparency. This includes specifying the MPM material parameters optimized during calibration, the train/test split used for the real demonstrations, and the characteristics of the unseen contact geometries and lighting conditions in the zero-shot evaluation sets. revision: yes
Circularity Check
No significant circularity: calibration on real demonstrations is distinct from zero-shot validation on separate tasks
full rationale
The paper models the tactile sensor using the Material Point Method for elastic deformation and learns an optical residual image relative to the real idle state, calibrated via differentiability on a small number of real demonstrations. The reported results (85% object classification, 90% tumor detection, <0.9 mm trajectory error) come from empirical zero-shot sim-to-real experiments on unseen objects, contacts, and policies, which are not equivalent to the calibration inputs by construction. No self-citations, uniqueness theorems, or ansatzes are invoked in the provided text to force the outcome. The derivation remains self-contained against external real-world benchmarks rather than reducing to fitted parameters renamed as predictions.
Axiom & Free-Parameter Ledger
free parameters (2)
- MPM material parameters
- residual network weights
axioms (2)
- domain assumption Material Point Method accurately captures large non-linear deformations of the soft sensor body
- domain assumption Optical response can be fully captured by a residual image relative to the idle state
Reference graph
Works this paper leans on
-
[1]
Gelsight: High-resolution robot tactile sensors for estimating geometry and force,
W. Yuan, S. Dong, and E. H. Adelson, “Gelsight: High-resolution robot tactile sensors for estimating geometry and force,”Sensors, vol. 17, no. 12, p. 2762, 2017
2017
-
[2]
Densetact: Optical tactile sensor for dense shape reconstruction,
W. K. Do and M. Kennedy, “Densetact: Optical tactile sensor for dense shape reconstruction,” in2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 6188–6194
2022
-
[3]
Densetact 2.0: Optical tactile sensor for shape and force reconstruction,
W. K. Do, B. Jurewicz, and M. Kennedy, “Densetact 2.0: Optical tactile sensor for shape and force reconstruction,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 12 549–12 555. V oxel res. (mm) Softness # substeps FPS PSNR (Medium) 1.2 15 100 3.6 31.39 1.2 15 20 17.1 30.17 2.4 30 100 3.8 30.98 2.4 30 20 17.2 29.79 ...
2023
-
[4]
Difftactile: A physics-based differentiable tactile simulator for contact-rich robotic manipulation,
Z. Si, G. Zhang, Q. Ben, B. Romero, X. Zhou, C. Liu, and C. Gan, “Difftactile: A physics-based differentiable tactile simulator for contact-rich robotic manipulation,”arXiv preprint arXiv:2403.08716,
-
[5]
Available: https://scispace.com/papers/difftactile-a- physics-based-differentiable-tactile-simulator-1q4pbz4xgc
[Online]. Available: https://scispace.com/papers/difftactile-a- physics-based-differentiable-tactile-simulator-1q4pbz4xgc
-
[6]
Tacto: A fast, flexible, and open-source simulator for high-resolution vision-based tactile sensors,
S. Wang, M. Lambeta, P.-W. Chou, and R. Calandra, “Tacto: A fast, flexible, and open-source simulator for high-resolution vision-based tactile sensors,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 3930–3937, 2022
2022
-
[7]
Taxim: An example-based simulation model for gelsight tactile sensors,
W. Yuan and Z. Si, “Taxim: An example-based simulation model for gelsight tactile sensors,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 3475–3482, 2022. [Online]. Available: https://scispace.com/papers/taxim-an-example- based-simulation-model-for-gelsight-tactile-f9075kf7
2022
-
[8]
Simulation of vision-based tactile sensors using physics based rendering,
A. Agarwal, T. Man, and W. Yuan, “Simulation of vision-based tactile sensors using physics based rendering,” inProceedings of the International Conference on Robotics and Automation (ICRA), 2021. [Online]. Available: https://scispace.com/papers/simulation-of-vision- based-tactile-sensors-using-physics-4lcow7l4d5
2021
-
[9]
Retrographic sensing for the measurement of surface texture and shape,
M. K. Johnson and E. H. Adelson, “Retrographic sensing for the measurement of surface texture and shape,” in2009 IEEE Conference on Computer Vision and Pattern Recognition. IEEE, 2009, pp. 1070– 1077
2009
-
[10]
Digit: A novel design for a low-cost compact high-resolution tactile sensor with application to in-hand manipulation,
M. Lambeta, P.-W. Chou, S. Tian, B. Yang, B. Maloon, V . R. Most, D. Stroud, R. Santos, A. Byagowi, G. Kammerer,et al., “Digit: A novel design for a low-cost compact high-resolution tactile sensor with application to in-hand manipulation,”IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 3838–3845, 2020
2020
-
[11]
Deep learning for tactile understanding from visual and haptic data
Y . Gao, L. A. Hendricks, K. J. Kuchenbecker, and T. Darrell, “Deep learning for tactile understanding from visual and haptic data.” IEEE, 2016, pp. 536–543
2016
-
[12]
General in-hand object rotation with vision and touch,
H. Qi, B. Yi, S. Suresh, M. Lambeta, Y . Ma, R. Calandra, and J. Malik, “General in-hand object rotation with vision and touch,” inConference on Robot Learning. PMLR, 2023, pp. 2549–2564
2023
-
[13]
Touch-gs: Visual-tactile supervised 3d gaussian splatting,
A. Swann, M. Strong, W. K. Do, G. S. Camps, M. Schwager, and M. K. III, “Touch-gs: Visual-tactile supervised 3d gaussian splatting,” arXiv, pp. 10 511–10 518, 2024
2024
-
[14]
Efficient tactile simulation with differentiability for robotic manipulation,
J. Xu, S. Kim, T. Chen, A. R. Garcia, P. Agrawal, W. Matusik, and S. Sueda, “Efficient tactile simulation with differentiability for robotic manipulation,” in6th Annual Conference on Robot Learning, 2022. [Online]. Available: https://openreview.net/forum?id=6BIffCl6gsM
2022
-
[15]
Difftaichi: Differentiable programming for physical simulation,
Y . Hu, Z. Li, L. Anderson, T.-M. L. Kaya, D. Ritchie, F. Durand, W. T. Freeman, J. B. Tenenbaum, and W. Matusik, “Difftaichi: Differentiable programming for physical simulation,”International Conference on Learning Representations (ICLR), 2020
2020
-
[16]
Chainqueen: A real-time differentiable physical simulator for soft robotics,
Y . Hu, J. Liu, A. Spielberg, J. B. Tenenbaum, W. T. Freeman, J. Wu, D. Rus, and W. Matusik, “Chainqueen: A real-time differentiable physical simulator for soft robotics,” in2019 International conference on robotics and automation (ICRA). IEEE, 2019, pp. 6265–6271
2019
-
[17]
Y . Zhao, K. Qian, B. Duan, and S. Luo, “Fots: A fast optical tactile simulator for sim2real learning of tactile-motor robot manipulation skills,” 2024. [Online]. Available: https://arxiv.org/abs/2404.19217
-
[18]
Bidirectional sim-to-real transfer for gelsight tactile sensors with cyclegan,
W. Chen, Y . Xu, Z. Chen, P. Zeng, R. Dang, R. Chen, and J. Xu, “Bidirectional sim-to-real transfer for gelsight tactile sensors with cyclegan,”IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 6187–6194, 2022
2022
-
[19]
Physdreamer: Physics-based interaction with 3d objects via video generation,
T. Zhang, H.-X. Yu, R. Wu, B. Y . Feng, C. Zheng, N. Snavely, J. Wu, and W. T. Freeman, “Physdreamer: Physics-based interaction with 3d objects via video generation,” inEuropean Conference on Computer Vision. Springer, 2024, pp. 388–406
2024
-
[20]
Reconstruction and simulation of elastic objects with spring-mass 3d gaussians,
L. Zhong, H.-X. Yu, J. Wu, and Y . Li, “Reconstruction and simulation of elastic objects with spring-mass 3d gaussians,”European Confer- ence on Computer Vision (ECCV), 2024
2024
-
[21]
The material point method for simulating continuum materials,
C. Jiang, C. Schroeder, J. Teran, A. Stomakhin, and A. Selle, “The material point method for simulating continuum materials,” inAcm siggraph 2016 courses, 2016, pp. 1–52
2016
-
[22]
[Online]
Dassault Syst `emes Simulia Corp.,Abaqus/Standard and Abaqus/Explicit User’s Manual, 2024th ed., Dassault Syst `emes SIMULIA, Providence, RI, USA, 2024. [Online]. Available: https://www.3ds.com/products/simulia/abaqus/
2024
-
[23]
ifem2. 0: Dense 3d contact force field reconstruction and assessment for vision-based tactile sensors,
C. Zhao, J. Liu, and D. Ma, “ifem2. 0: Dense 3d contact force field reconstruction and assessment for vision-based tactile sensors,”IEEE Transactions on Robotics, 2024
2024
-
[24]
W. K. Do, M. Strong, A. Swann, B. Lei, and M. Kennedy III, “Tensortouch: Calibration of tactile sensors for high resolution stress tensor and deformation for dexterous manipulation,”arXiv preprint arXiv:2506.08291, 2025
-
[25]
R. W. Ogden,Non-linear elastic deformations. Courier Corporation, 1997
1997
-
[26]
Rethinking Atrous Convolution for Semantic Image Segmentation
L.-C. Chen, G. Papandreou, F. Schroff, and H. Adam, “Rethinking atrous convolution for semantic image segmentation,”arXiv preprint arXiv:1706.05587, 2017
work page internal anchor Pith review arXiv 2017
-
[27]
Pcn: Point completion network,
W. Yuan, T. Khot, D. Held, C. Mertz, and M. Hebert, “Pcn: Point completion network,” in2018 international conference on 3D vision (3DV). IEEE, 2018, pp. 728–737
2018
-
[28]
Grnet: Gridding residual network for dense point cloud completion,
H. Xie, H. Yao, S. Zhou, J. Mao, S. Zhang, and W. Sun, “Grnet: Gridding residual network for dense point cloud completion,” in European conference on computer vision. Springer, 2020, pp. 365– 381
2020
-
[29]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal Policy Optimization Algorithms,” pp. 1–12, 2017, arXiv: 1707.06347. [Online]. Available: http://arxiv.org/abs/1707.06347
work page internal anchor Pith review arXiv 2017
-
[30]
skrl: Modular and flexible library for reinforcement learning,
A. Serrano-Mu ˜noz, D. Chrysostomou, S. Bøgh, and N. Arana- Arexolaleiba, “skrl: Modular and flexible library for reinforcement learning,”Journal of Machine Learning Research, vol. 24, no. 254, pp. 1–9, 2023. [Online]. Available: http://jmlr.org/papers/v24/23- 0112.html APPENDIX A. Optical Rendering Network Architecture Our optical rendering network follo...
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.