Recognition: unknown
GSDrive: Reinforcing Driving Policies by Multi-mode Trajectory Probing with 3D Gaussian Splatting Environment
Pith reviewed 2026-05-07 06:14 UTC · model grok-4.3
The pith
3D Gaussian Splatting enables dense physics-based rewards for end-to-end driving policies via multi-mode trajectory probing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
GSDrive exploits 3D Gaussian Splatting for differentiable, physics-based reward shaping in end-to-end driving policy improvement. It incorporates a flow matching-based trajectory predictor within the 3DGS simulator, enabling multi-mode trajectory probing where candidate trajectories are rolled out to assess prospective rewards. This establishes a bidirectional knowledge exchange between imitation learning and reinforcement learning by grounding reward functions in physically simulated interaction signals, offering immediate dense feedback instead of sparse catastrophic events. Evaluated on the reconstructed nuScenes dataset, the method surpasses existing simulation-based RL driving policies.
What carries the argument
Multi-mode trajectory probing inside a 3D Gaussian Splatting environment, driven by a flow matching trajectory predictor, that supplies differentiable physics-based interaction signals for reward shaping.
If this is right
- Reward functions grounded in simulated interactions supply immediate dense feedback rather than delayed catastrophic signals.
- Bidirectional knowledge exchange between imitation learning and reinforcement learning yields higher-quality policies.
- Policies trained this way achieve better closed-loop performance than prior simulation-based RL methods on the reconstructed dataset.
- The approach reduces premature convergence to suboptimal behaviors caused by sparse event rewards.
Where Pith is reading between the lines
- If the Gaussian Splatting reconstruction captures real-world dynamics reliably, the same probing technique could lower dependence on large-scale real-world data collection for policy training.
- Extending the multi-mode probing to model interactions with multiple dynamic agents could strengthen safety guarantees in crowded traffic.
- The differentiable simulator structure suggests a route toward applying similar dense-reward shaping in other continuous-control robotics domains.
Load-bearing premise
The 3D Gaussian Splatting reconstruction and flow matching trajectory predictor produce sufficiently accurate and generalizable physics-based interaction signals that improve policies beyond what sparse event rewards achieve.
What would settle it
A closed-loop experiment on the reconstructed dataset in which GSDrive policies show no performance gain or worse results than standard RL baselines, or in which simulated trajectory rewards fail to correlate with actual outcomes, would falsify the central claim.
Figures



read the original abstract
End-to-end (E2E) autonomous driving presents a promising approach for translating perceptual inputs directly into driving actions. However, prohibitive annotation costs and temporal data quality degradation hinder long-term real-world deployment. While combining imitation learning (IL) and reinforcement learning (RL) is a common strategy for policy improvement, conventional RL training relies on delayed, event-based rewards-policies learn only from catastrophic outcomes such as collisions, leading to premature convergence to suboptimal behaviors. To address these limitations, we introduce GSDrive, a framework that exploits 3D Gaussian Splatting (3DGS) for differentiable, physics-based reward shaping in E2E driving policy improvement. Our method incorporates a flow matching-based trajectory predictor within the 3DGS simulator, enabling multi-mode trajectory probing where candidate trajectories are rolled out to assess prospective rewards. This establishes a bidirectional knowledge exchange between IL and RL by grounding reward functions in physically simulated interaction signals, offering immediate dense feedback instead of sparse catastrophic events. Evaluated on the reconstructed nuScenes dataset, our method surpasses existing simulation-based RL driving approaches in closed-loop experiments. Code is available at https://github.com/ZionGo6/GSDrive.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces GSDrive, a framework for end-to-end autonomous driving that constructs a 3D Gaussian Splatting (3DGS) simulator to supply dense, differentiable rewards for RL-based policy improvement. A flow-matching trajectory predictor enables multi-mode probing of other agents' future paths within the reconstructed environment, grounding rewards in simulated interaction signals rather than sparse event-based penalties such as collisions. The approach is positioned as creating bidirectional knowledge transfer between imitation learning and RL. The central empirical claim is that the method outperforms prior simulation-based RL driving approaches in closed-loop experiments on reconstructed nuScenes data, with code released publicly.
Significance. If the 3DGS environment can be shown to deliver accurate, generalizable physics-based interaction signals and the closed-loop gains are robustly demonstrated with proper controls, the work would offer a practical advance in reward shaping for autonomous driving RL, potentially improving sample efficiency and safety over conventional sparse-reward setups. The public code release supports reproducibility and is a clear strength.
major comments (3)
- [Abstract, Experiments] Abstract and Experiments section: The headline claim of surpassing existing simulation-based RL methods in closed-loop nuScenes experiments is load-bearing for the contribution, yet the abstract supplies no quantitative metrics, baseline names, statistical tests, or ablation results. Without these, it is impossible to determine whether measured improvements arise from the proposed multi-mode probing and 3DGS rewards or from other factors such as exploration differences.
- [Method] Method section on reward shaping: The repeated assertion that 3DGS supplies 'physics-based' interaction signals for reward computation is not supported by the underlying representation. 3D Gaussian Splatting is a view-synthesis technique whose splats enable approximate geometric collision queries only after additional engineering; it does not encode mass, friction coefficients, or vehicle dynamics. The manuscript must either provide explicit validation (e.g., comparison of simulated collision forces or trajectories against a physics engine or real nuScenes dynamics) or qualify the rewards as geometry-based rather than physics-based.
- [Experiments] Experiments section on evaluation protocol: All closed-loop results are reported on the identical reconstructed nuScenes scenes used to train the 3DGS models and flow-matching predictor. This setup risks the policy learning to exploit reconstruction artifacts or predictor biases rather than genuine interaction physics. A held-out scene split, transfer to real-world driving logs, or comparison against a standard physics simulator (e.g., CARLA) is required to substantiate generalization.
minor comments (2)
- [Method] The notation for the flow-matching predictor and the multi-mode probing objective should be introduced with explicit equations and variable definitions to improve readability.
- [Figures] Figure captions for the 3DGS environment visualizations should include quantitative measures of reconstruction fidelity (e.g., PSNR or collision-query accuracy) rather than qualitative examples alone.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. We have addressed each of the major comments by revising the relevant sections to improve clarity and accuracy. Our responses are provided below.
read point-by-point responses
-
Referee: [Abstract, Experiments] Abstract and Experiments section: The headline claim of surpassing existing simulation-based RL methods in closed-loop nuScenes experiments is load-bearing for the contribution, yet the abstract supplies no quantitative metrics, baseline names, statistical tests, or ablation results. Without these, it is impossible to determine whether measured improvements arise from the proposed multi-mode probing and 3DGS rewards or from other factors such as exploration differences.
Authors: We agree that the abstract would benefit from including specific quantitative details to better support the claims. In the revised manuscript, we have updated the abstract to incorporate key metrics from the closed-loop experiments on nuScenes, such as improvements in success rate and reductions in collision frequency compared to prior simulation-based RL methods. We also mention the main baselines used and note that ablation studies and statistical analyses (including standard deviations over multiple runs) are detailed in the Experiments section. This revision helps clarify the source of the performance gains. revision: yes
-
Referee: [Method] Method section on reward shaping: The repeated assertion that 3DGS supplies 'physics-based' interaction signals for reward computation is not supported by the underlying representation. 3D Gaussian Splatting is a view-synthesis technique whose splats enable approximate geometric collision queries only after additional engineering; it does not encode mass, friction coefficients, or vehicle dynamics. The manuscript must either provide explicit validation (e.g., comparison of simulated collision forces or trajectories against a physics engine or real nuScenes dynamics) or qualify the rewards as geometry-based rather than physics-based.
Authors: We appreciate this clarification on the nature of 3DGS. The rewards in GSDrive are computed using geometric information from the 3DGS reconstruction, such as splat-based distance calculations for interaction assessment, rather than full physical simulation involving dynamics parameters. We have revised all instances in the manuscript to describe these as 'geometry-based interaction signals' derived from the 3DGS environment. A new explanatory paragraph has been added to the Method section outlining the reward computation and its reliance on geometric queries. We acknowledge that full physics validation is not provided and list this as a limitation for future investigation. revision: yes
-
Referee: [Experiments] Experiments section on evaluation protocol: All closed-loop results are reported on the identical reconstructed nuScenes scenes used to train the 3DGS models and flow-matching predictor. This setup risks the policy learning to exploit reconstruction artifacts or predictor biases rather than genuine interaction physics. A held-out scene split, transfer to real-world driving logs, or comparison against a standard physics simulator (e.g., CARLA) is required to substantiate generalization.
Authors: This is a fair observation about the evaluation protocol. The 3DGS models are scene-specific reconstructions from nuScenes, so the RL training and closed-loop testing occur within these environments. The flow-matching predictor is trained across the dataset to model general multi-agent behaviors. In the revised manuscript, we have expanded the Experiments section with a discussion of the evaluation protocol, explaining how multi-mode probing provides robustness against potential biases. We have also added a Limitations section that explicitly addresses the use of the same scenes for reconstruction and evaluation, and outlines the need for future work on held-out splits, CARLA comparisons, and real-world transfer to further validate generalization. revision: partial
- Conducting new experiments for held-out scene evaluation or direct comparisons to CARLA, which would require significant additional resources and time beyond the current revision cycle.
Circularity Check
No circularity detected; derivation is self-contained
full rationale
The paper's central derivation defines a reward-shaping mechanism that applies an external 3D Gaussian Splatting reconstruction of nuScenes scenes together with a separately trained flow-matching trajectory predictor to generate dense interaction signals for RL. These components are introduced as pre-existing techniques (3DGS for view synthesis and differentiable rendering, flow matching for multi-modal prediction) and are not defined in terms of the policy being optimized. The bidirectional IL-RL exchange is implemented by using the simulator outputs as inputs to the RL objective rather than fitting the policy parameters back into the reward definition. Closed-loop evaluation on the reconstructed scenes compares against prior simulation-based RL baselines but does not reduce the claimed performance gain to a tautological re-expression of the training data or to a self-citation chain. No equations or algorithmic steps in the provided description equate the final policy performance to its own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption 3D Gaussian Splatting reconstruction of driving scenes yields a differentiable environment whose rendered physics interactions are sufficiently accurate for reward shaping.
- domain assumption The flow matching-based trajectory predictor generates realistic multi-mode candidate trajectories that can be rolled out to assess prospective rewards.
Reference graph
Works this paper leans on
-
[1]
End- to-end autonomous driving: Challenges and frontiers,
L. Chen, P. Wu, K. Chitta, B. Jaeger, A. Geiger, and H. Li, “End- to-end autonomous driving: Challenges and frontiers,”IEEE Trans. on Pattern Analysis and Machine Intelligence, vol. 46, no. 12, pp. 10 164–10 183, 2024
2024
-
[2]
The era of end-to-end autonomy: Transitioning from rule-based driving to large driving models,
E. Nebot and J. S. B. Perez, “The era of end-to-end autonomy: Transitioning from rule-based driving to large driving models,”arXiv preprint arXiv:2603.16050, 2026
-
[3]
Iterative label refinement matters more than preference optimization under weak supervision,
Y . Ye, C. Laidlaw, and J. Steinhardt, “Iterative label refinement matters more than preference optimization under weak supervision,”arXiv preprint arXiv:2501.07886, 2025
-
[4]
End-to-end driving with online trajectory evaluation via bev world model,
Y . Li, Y . Wang, Y . Liu, J. He, L. Fan, and Z. Zhang, “End-to-end driving with online trajectory evaluation via bev world model,” in Proceedings of the IEEE/CVF Int. Conf. on Computer Vision, 2025, pp. 27 137–27 146
2025
-
[5]
C. Sima, K. Chitta, Z. Yu, S. Lan, P. Luo, A. Geiger, H. Li, and J. M. Alvarez, “Centaur: Robust end-to-end autonomous driving with test-time training,”arXiv preprint arXiv:2503.11650, 2025
-
[6]
Data scaling laws for end-to-end autonomous driving,
A. Naumann, X. Gu, T. Dimlioglu, M. Bojarski, A. Degirmenci, A. Popov, D. Bisla, M. Pavone, U. Muller, and B. Ivanovic, “Data scaling laws for end-to-end autonomous driving,” inProceedings of the Computer Vision and Pattern Recognition Conference, 2025, pp. 2571–2582
2025
-
[7]
Synad: Enhancing real-world end-to-end autonomous driving models through synthetic data integration,
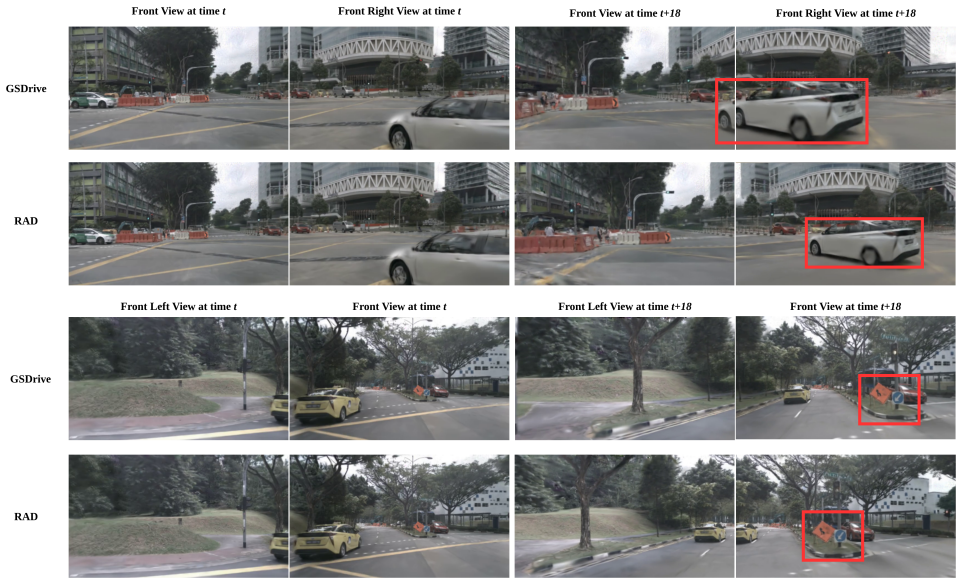
J. Kim, J. Lee, G. Han, D.-J. Lee, M. Jeong, and J. Kim, “Synad: Enhancing real-world end-to-end autonomous driving models through synthetic data integration,” inProceedings of the IEEE/CVF Int. Conf. on Computer Vision, 2025, pp. 25 197–25 206. Fig. 4: Qualitative comparisons in the closed-loop test
2025
-
[8]
Diffe2e: Rethinking end-to-end driving with a hybrid diffusion-regression-classification policy,
R. Zhao, Y . Fan, Z. Chen, F. Gao, and Z. Gao, “Diffe2e: Rethinking end-to-end driving with a hybrid diffusion-regression-classification policy,” inThe Thirty-ninth Annual Conf. on Neural Information Processing Systems, 2025
2025
-
[9]
Distilldrive: End-to- end multi-mode autonomous driving distillation by isomorphic hetero- source planning model,
R. Yu, X. Zhang, R. Zhao, H. Yan, and M. Wang, “Distilldrive: End-to- end multi-mode autonomous driving distillation by isomorphic hetero- source planning model,” inProceedings of the IEEE/CVF Int. Conf. on Computer Vision, 2025, pp. 26 188–26 197
2025
-
[10]
Artemis: Autoregressive end-to-end trajectory planning with mixture of experts for autonomous driving,
R. Feng, N. Xi, D. Chu, R. Wang, Z. Deng, A. Wang, L. Lu, J. Wang, and Y . Huang, “Artemis: Autoregressive end-to-end trajectory planning with mixture of experts for autonomous driving,”IEEE Robotics and Automation Letters, vol. 11, no. 1, pp. 226–233, 2025
2025
-
[11]
Ztrs: Zero-imitation end-to-end autonomous driving with trajectory scoring,
Z. Li, W. Yao, Z. Wang, X. Sun, J. Chen, N. Chang, M. Shen, J. Song, Z. Wu, S. Lan,et al., “Ztrs: Zero-imitation end-to-end autonomous driving with trajectory scoring,”arXiv preprint arXiv:2510.24108, 2025
-
[12]
ReCogDrive: A Reinforced Cognitive Framework for End-to-End Autonomous Driving
Y . Li, K. Xiong, X. Guo, F. Li, S. Yan, G. Xu, L. Zhou, L. Chen, H. Sun, B. Wang,et al., “Recogdrive: A reinforced cog- nitive framework for end-to-end autonomous driving,”arXiv preprint arXiv:2506.08052, 2025
work page internal anchor Pith review arXiv 2025
-
[13]
S. Shang, Y . Chen, Y . Wang, Y . Li, and Z. Zhang, “Drivedpo: Policy learning via safety dpo for end-to-end autonomous driving,”arXiv preprint arXiv:2509.17940, 2025
-
[14]
Takead: Preference-based post-optimization for end-to-end autonomous driving with expert takeover data,
D. Liu, Y . Gao, D. Qian, Q. Zhang, X. Ye, J. Han, Y . Zheng, X. Liu, Z. Xia, D. Ding,et al., “Takead: Preference-based post-optimization for end-to-end autonomous driving with expert takeover data,”IEEE Robotics and Automation Letters, vol. 11, no. 2, pp. 1738–1745, 2025
2025
-
[15]
H. Gao, S. Chen, B. Jiang, B. Liao, Y . Shi, X. Guo, Y . Pu, H. Yin, X. Li, X. Zhang,et al., “Rad: Training an end-to-end driving policy via large-scale 3dgs-based reinforcement learning,”arXiv preprint arXiv:2502.13144, 2025
-
[16]
Recondreamer-rl: Enhancing reinforcement learning via diffusion-based scene reconstruction,
C. Ni, G. Zhao, X. Wang, Z. Zhu, W. Qin, X. Chen, G. Jia, G. Huang, and W. Mei, “Recondreamer-rl: Enhancing reinforcement learning via diffusion-based scene reconstruction,”arXiv preprint arXiv:2508.08170, 2025
-
[17]
Drive&gen: Co-evaluating end-to-end driving and video generation models,
J. Wang, Z. Yang, Y . Bai, Y . Li, Y . Zou, B. Sun, A. Kundu, J. Lezama, L. Y . Huang, Z. Zhu,et al., “Drive&gen: Co-evaluating end-to-end driving and video generation models,” in2025 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS). IEEE, 2025, pp. 8934– 8941
2025
-
[18]
Futurex: Enhance end-to-end autonomous driving via latent chain-of-thought world model,
H. Lin, Y . Yang, Y . Zhang, C. Zheng, J. Feng, S. Wang, Z. Wang, S. Chen, B. Wang, Y . Zhang,et al., “Futurex: Enhance end-to-end autonomous driving via latent chain-of-thought world model,”arXiv preprint arXiv:2512.11226, 2025
-
[19]
Vggt: Visual geometry grounded transformer,
J. Wang, M. Chen, N. Karaev, A. Vedaldi, C. Rupprecht, and D. Novotny, “Vggt: Visual geometry grounded transformer,” inPro- ceedings of the Computer Vision and Pattern Recognition Conference, 2025, pp. 5294–5306
2025
-
[20]
Lift, splat, shoot: Encoding images from arbitrary camera rigs by implicitly unprojecting to 3d,
J. Philion and S. Fidler, “Lift, splat, shoot: Encoding images from arbitrary camera rigs by implicitly unprojecting to 3d,” inEuropean conference on computer vision. Springer, 2020, pp. 194–210
2020
-
[21]
Deep residual learning for image recognition,
K. He, X. Zhang, S. Ren, and J. Sun, “Deep residual learning for image recognition,” inProceedings of the IEEE/CVF Conf. on Computer Vision and Pattern Recognition, June 2016
2016
-
[22]
Classifier-Free Diffusion Guidance
J. Ho and T. Salimans, “Classifier-free diffusion guidance,”arXiv preprint arXiv:2207.12598, 2022
work page internal anchor Pith review arXiv 2022
-
[23]
Optimal flow matching: Learning straight trajectories in just one step,
N. Kornilov, P. Mokrov, A. Gasnikov, and A. Korotin, “Optimal flow matching: Learning straight trajectories in just one step,”Advances in Neural Information Processing Systems, vol. 37, pp. 104 180–104 204, 2024
2024
-
[24]
On unbalanced optimal transport: An analysis of sinkhorn algorithm,
K. Pham, K. Le, N. Ho, T. Pham, and H. Bui, “On unbalanced optimal transport: An analysis of sinkhorn algorithm,” inInt. Conf. on Machine Learning. PMLR, 2020, pp. 7673–7682
2020
-
[25]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal policy optimization algorithms,”arXiv preprint arXiv:1707.06347, 2017
work page internal anchor Pith review arXiv 2017
-
[26]
Skill-critic: Refining learned skills for hierarchical rein- forcement learning,
C. Hao, C. Weaver, C. Tang, K. Kawamoto, M. Tomizuka, and W. Zhan, “Skill-critic: Refining learned skills for hierarchical rein- forcement learning,”IEEE Robotics and Automation Letters, vol. 9, no. 4, pp. 3625–3632, 2024
2024
-
[27]
Reinforcement learning with inverse rewards for world model post-training,
Y . Ye, T. He, S. Yang, and J. Bian, “Reinforcement learning with inverse rewards for world model post-training,”arXiv preprint arXiv:2509.23958, 2025
-
[28]
Reinforcement Learning with Action Chunking
Q. Li, Z. Zhou, and S. Levine, “Reinforcement learning with action chunking,”arXiv preprint arXiv:2507.07969, 2025
work page internal anchor Pith review arXiv 2025
-
[29]
Denoising diffusion probabilistic models,
J. Ho, A. Jain, and P. Abbeel, “Denoising diffusion probabilistic models,”Advances in neural information processing systems, vol. 33, pp. 6840–6851, 2020
2020
-
[30]
Denoising Diffusion Implicit Models
J. Song, C. Meng, and S. Ermon, “Denoising diffusion implicit models,”arXiv preprint arXiv:2010.02502, 2020
work page internal anchor Pith review arXiv 2010
-
[31]
Flow Matching for Generative Modeling
Y . Lipman, R. T. Chen, H. Ben-Hamu, M. Nickel, and M. Le, “Flow matching for generative modeling,”arXiv preprint arXiv:2210.02747, 2022
work page internal anchor Pith review arXiv 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.