Recognition: 3 theorem links
· Lean TheoremFoundations of Riemannian Geometry for Riemannian Optimization: A Monograph with Detailed Derivations
Pith reviewed 2026-05-08 18:18 UTC · model grok-4.3
The pith
A monograph supplies explicit coordinate derivations of Riemannian geometry for direct use in optimization on matrix manifolds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The monograph establishes a unified treatment by systematically deriving the tangent and cotangent spaces, tensor calculus, metric tensors, Levi-Civita connections, curvature tensors, and geodesics in coordinates and matrix form. It then obtains explicit formulas for the Riemannian gradient, Hessian, exponential map, and retraction, and supplies the corresponding closed-form expressions on the Stiefel, Grassmann, and SPD manifolds.
What carries the argument
The coordinate-level derivation of the Levi-Civita connection and curvature on matrix manifolds, which produces the explicit Riemannian gradient and Hessian operators needed for numerical optimization.
Load-bearing premise
Classical results from Riemannian geometry can be specialized to the Stiefel, Grassmann, and SPD manifolds through explicit, error-free coordinate calculations that match the needs of numerical optimization without omissions.
What would settle it
Numerical verification that the derived expression for the Riemannian Hessian on the SPD manifold reproduces the known closed-form result from the literature or satisfies the defining properties of the Hessian operator on sample points.
Figures
























read the original abstract
Riemannian geometry provides the fundamental framework for optimization on nonlinear spaces such as matrix manifolds, which arise in machine learning, signal processing, and robotics. While the underlying theory is classical, existing literature often presents results at a high level of abstraction, omitting the detailed coordinate-level derivations required for implementation and algorithm development. This work provides a self-contained and rigorous treatment of the foundations of Riemannian geometry, with a focus on explicit derivations tailored to Riemannian optimization. We systematically develop the key geometric structures -- including tangent and cotangent spaces, tensor calculus, metric tensors, Levi-Civita connections, curvature, and geodesics -- emphasizing step-by-step derivations in coordinates and matrix form. Building on these foundations, we derive the Riemannian gradient, Hessian, exponential map, and retraction in a form suitable for numerical computation. We further specialize these constructions to important matrix manifolds, including the Stiefel, Grassmann, and SPD (Symmetric Positive Definite) manifolds, providing explicit formulas widely used in optimization and geometric machine learning. This monograph develops a unified and implementation-oriented treatment of Riemannian geometry for optimization on manifolds. Its main contribution is the systematic organization and detailed derivation of classical geometric constructions in forms directly usable for algorithm design and numerical implementation. By connecting coordinate-level differential geometry with matrix-manifold formulas, the monograph bridges the gap between abstract theory and practical computation, and provides a reference for researchers and practitioners working in Riemannian optimization and related fields.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript is a monograph developing the foundations of Riemannian geometry with explicit, coordinate-level and matrix-form derivations for use in Riemannian optimization. It systematically treats tangent/cotangent spaces, tensor calculus, metric tensors, Levi-Civita connections, curvature, geodesics, Riemannian gradients/Hessians, exponential maps, and retractions, then specializes these constructions to the Stiefel, Grassmann, and SPD manifolds with formulas intended for direct numerical implementation.
Significance. If the derivations prove accurate and complete, the work supplies a useful, self-contained reference that organizes classical Riemannian geometry results into implementation-oriented forms. This addresses a genuine gap in the literature where abstract treatments often omit the coordinate details needed for algorithm design on matrix manifolds. The emphasis on step-by-step derivations and specialization to commonly used manifolds in geometric machine learning constitutes a practical contribution, even though the underlying mathematics is classical.
minor comments (2)
- [Abstract and Introduction] The abstract and introduction describe the derivations as 'rigorous' and 'self-contained' but provide no sample equations or proof outlines; ensure the main body contains fully expanded coordinate derivations for at least the Levi-Civita connection and exponential map on each manifold so readers can verify correctness without external references.
- [Sections on metric tensors and curvature] Notation for the metric tensor and its inverse is introduced early but used inconsistently in later matrix-manifold sections; adopt a single, uniform convention (e.g., always denoting the inverse metric explicitly) to avoid ambiguity in the curvature and Hessian formulas.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our monograph and the recommendation of minor revision. The referee's summary correctly identifies the manuscript's focus on explicit coordinate-level and matrix-form derivations of Riemannian geometric structures for direct use in optimization algorithms.
Circularity Check
No significant circularity; classical derivations are self-contained
full rationale
The monograph systematically re-derives standard objects of Riemannian geometry (tangent spaces, Levi-Civita connection, curvature, exponential map, retraction) in coordinate and matrix form for the Stiefel, Grassmann, and SPD manifolds. These steps follow directly from the classical definitions of Riemannian metrics, covariant derivatives, and geodesics without introducing fitted parameters, self-referential equations, or load-bearing self-citations that reduce the central claims to their own inputs. The paper explicitly positions its contribution as explicit, implementation-oriented re-derivations of well-established results rather than novel theorems, rendering the derivation chain independent of any circular reduction.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Existence and uniqueness of the Levi-Civita connection on a Riemannian manifold
- domain assumption Smooth manifold structure on the Stiefel, Grassmann, and SPD matrix spaces
Lean theorems connected to this paper
-
Foundation.RealityFromDistinction (umbrella forcing chain)reality_from_one_distinction unclearRather than introducing new theoretical results, we focus on systematically deriving classical concepts in a way that makes every step transparent and implementable.
-
Cost.FunctionalEquation (J(x)=½(x+x⁻¹)−1 uniqueness) and Constants/φ-ladderwashburn_uniqueness_aczel unclearWe further specialize these constructions to important matrix manifolds, including the Stiefel, Grassmann, and SPD (Symmetric Positive Definite) manifolds, providing explicit formulas widely used in optimization and geometric machine learning.
-
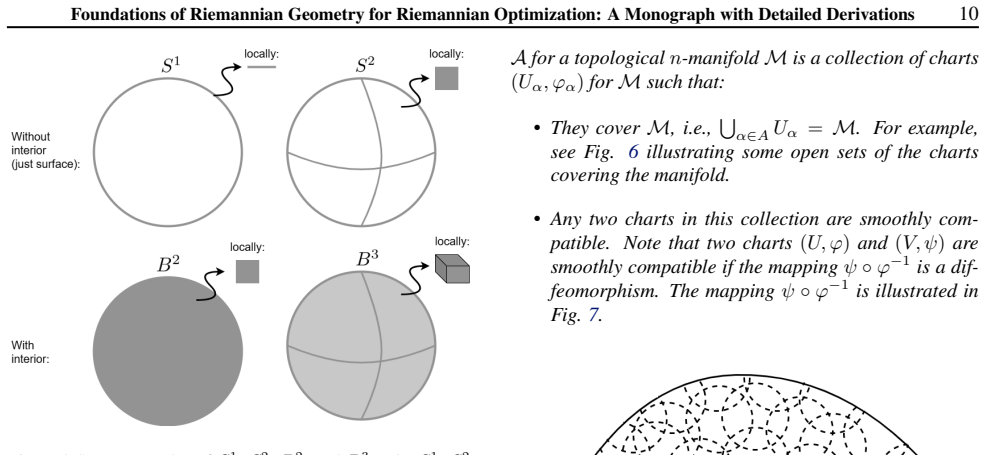
Foundation.AlexanderDuality (D=3 from circle linking) — domain is independent geometry, no overlap with RS forcing chainalexander_duality_circle_linking unclearRiemannian metric, Levi-Civita connection, Christoffel symbols, Riemann curvature tensor, sectional/Ricci/scalar curvature, exponential/logarithm maps, retractions, vector transport — all derived in coordinate form for Stiefel/Grassmann/SPD.
Reference graph
Works this paper leans on
-
[1]
Asanjarani, Azam. A Finsler geometrical programming for the nonlinear complementarity problem of traffic equi- librium.arXiv preprint arXiv:2109.01256,
-
[2]
Betancourt, Michael, Jordan, Michael I, and Wilson, Ashia C. On symplectic optimization.arXiv preprint arXiv:1802.03653,
-
[3]
doi: 10.1515/crll.1869.70.46. Cotton, ´Emile. Sur les vari ´et´es `a trois dimensions.An- nales de la Facult ´e des sciences de l’Universit ´e de Toulouse pour les sciences math´ematiques et les sciences physiques, 1(4):385–438,
-
[4]
Optimization on manifolds: A symplectic approach.arXiv preprint arXiv:2107.11231,
Franc ¸a, Guilherme, Barp, Alessandro, Girolami, Mark, and Jordan, Michael I. Optimization on manifolds: A symplectic approach.arXiv preprint arXiv:2107.11231,
-
[5]
Eigenvalue and g eneral- ized eigenvalue problems: Tutorial,
Ghojogh, Benyamin, Karray, Fakhri, and Crowley, Mark. Eigenvalue and generalized eigenvalue problems: Tuto- rial.arXiv preprint arXiv:1903.11240,
-
[6]
Ghojogh, Benyamin, Ghodsi, Ali, Karray, Fakhri, and Crowley, Mark. KKT conditions, first-order and second- order optimization, and distributed optimization: Tuto- rial and survey.arXiv preprint arXiv:2110.01858,
-
[7]
Ghojogh, Benyamin, Ghodsi, Ali, Karray, Fakhri, and Crowley, Mark. Spectral, probabilistic, and deep met- ric learning: Tutorial and survey.arXiv preprint arXiv:2201.09267, 2022a. Ghojogh, Benyamin, Karray, Fakhri, and Crowley, Mark. On manifold hypothesis: Hypersurface submanifold em- bedding using osculating hyperspheres.arXiv preprint arXiv:2202.01619,...
-
[8]
Mixest: An estimation toolbox for mixture models.arXiv preprint arXiv:1507.06065,
Hosseini, Reshad and Mash’al, Mohamadreza. Mixest: An estimation toolbox for mixture models.arXiv preprint arXiv:1507.06065,
-
[9]
A Rieman- nian BFGS method for nonconvex optimization prob- lems
Huang, Wen, Absil, P-A, and Gallivan, Kyle A. A Rieman- nian BFGS method for nonconvex optimization prob- lems. InNumerical Mathematics and Advanced Appli- cations ENUMATH 2015, pp. 627–634. Springer,
2015
-
[10]
Kasai, Hiroyuki, Sato, Hiroyuki, and Mishra, Bamdev. Rie- mannian stochastic variance reduced gradient on Grass- mann manifold.arXiv preprint arXiv:1605.07367,
-
[11]
Geoopt: Riemannian optimization in PyTorch.arXiv preprint arXiv:2005.02819,
Kochurov, Max, Karimov, Rasul, and Kozlukov, Serge. Geoopt: Riemannian optimization in PyTorch.arXiv preprint arXiv:2005.02819,
-
[12]
doi: 10.1007/BF03014898. Foundations of Riemannian Geometry for Riemannian Optimization: A Monograph with Detailed Derivations142 Li, Dong-Hui and Fukushima, Masao. On the global con- vergence of the BFGS method for nonconvex uncon- strained optimization problems.SIAM Journal on Op- timization, 11(4):1054–1064,
-
[13]
The entropy formula for the Ricci flow and its geometric applications
Perelman, Grisha. The entropy formula for the Ricci flow and its geometric applications.arXiv preprint math/0211159,
-
[14]
Finite extinction time for the solutions to the Ricci flow on certain three-manifolds
Perelman, Grisha. Finite extinction time for the solutions to the Ricci flow on certain three-manifolds.arXiv preprint math/0307245, 2003a. Perelman, Grisha. Ricci flow with surgery on three- manifolds.arXiv preprint math/0303109, 2003b. Poincar´e, MH. Cinqui `eme compl ´ement `a l’analysis situs [fifth supplement to analysis situs].Rendiconti del Cir- co...
work page Pith review arXiv 1940
-
[15]
Townsend, James, Koep, Niklas, and Weichwald, Sebas- tian. Pymanopt: A Python toolbox for optimization on manifolds using automatic differentiation.arXiv preprint arXiv:1603.03236,
-
[16]
Rieman- nian SVRG: Fast stochastic optimization on Riemannian manifolds.Advances in Neural Information Processing Systems, 29, 2016
Zhang, Hongyi, J Reddi, Sashank, and Sra, Suvrit. Rieman- nian SVRG: Fast stochastic optimization on Riemannian manifolds.Advances in Neural Information Processing Systems, 29, 2016
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.