Recognition: unknown
Data-driven Initial Gap Identification of Piecewise-linear Systems using Sparse Regression and Universal Approximation Theorem
Pith reviewed 2026-05-09 15:45 UTC · model grok-4.3
The pith
A data-driven method identifies the initial gap in piecewise-linear systems by discovering governing equations with sparse regression and recovering the gap from coefficients and switching points using the universal approximation theorem.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that an initial gap in a piecewise-linear system can be identified from data by using sparse regression to obtain an approximation of the system as a finite sum of piecewise-linear functions and then calculating the equivalent gap directly from the coefficients of those functions and their switching points, relying on the universal approximation theorem. This yields a data-driven recovery of the switching point without prior structural assumptions beyond the piecewise-linear character of the system.
What carries the argument
Sparse regression that approximates a piecewise-linear function by a finite sum of piecewise-linear functions, from which the initial gap is recovered as an equivalent value using the coefficients and switching points.
If this is right
- The identified gap allows direct analysis of nonlinear switching behavior in engineered piecewise-linear systems.
- The method applies without requiring an assumed functional form for the gap location.
- Numerical models confirm the approach recovers the gap accurately when the system is truly piecewise-linear.
- Experimental tests on a mass-spring-hopping system demonstrate high accuracy in a physical setting.
Where Pith is reading between the lines
- The same regression-plus-extraction procedure could be tested on time-series data from aging infrastructure to track gradual gap changes.
- If the finite-sum approximation remains stable, the technique might combine with other sparse regression variants for systems containing multiple unknown switching points.
- Successful gap recovery from data could support predictive maintenance schedules that treat the gap as a measurable degradation indicator.
Load-bearing premise
A piecewise-linear function can be sufficiently approximated by a finite sum of piecewise-linear functions inside the sparse regression framework so that the gap is accurately recovered from the resulting coefficients and switching points.
What would settle it
Running the method on data generated from a known piecewise-linear system with a known true initial gap and obtaining a recovered gap value that differs substantially from the true value.
Figures

read the original abstract
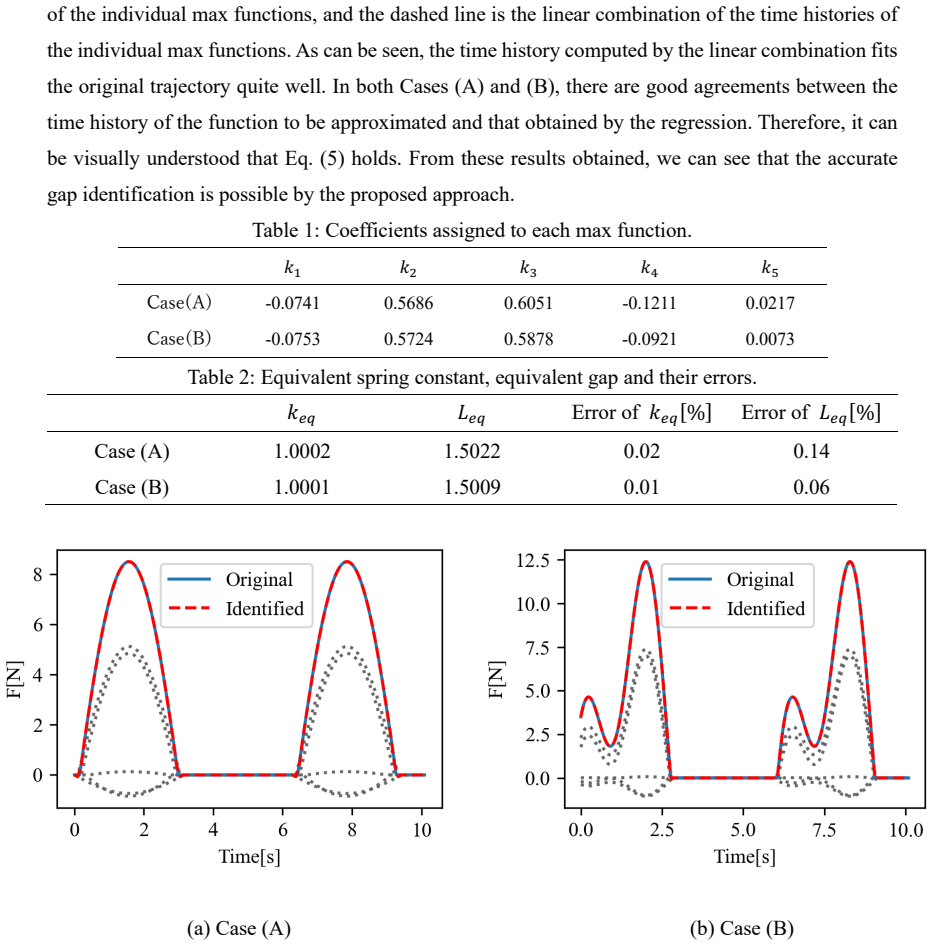
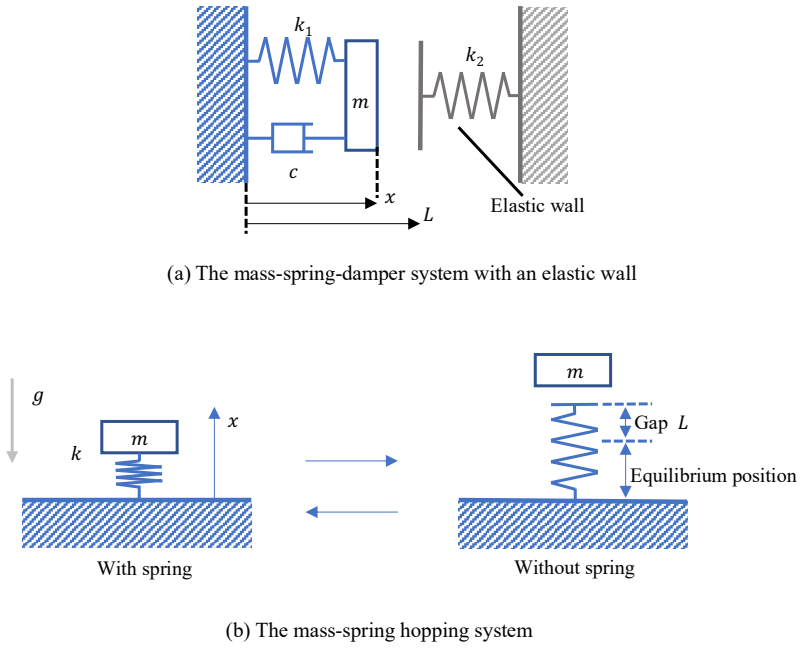
This paper proposes a method for identifying an initial gap in piecewise-linear systems from data. Piecewise-linear systems appear in many engineered systems such as degraded mechanical systems and infrastructures, and are known to show strong nonlinearities. To analyze the behavior of such piecewise-linear systems, it is necessary to identify the initial gap, at which the system behavior switches. The proposed method identifies the initial gap by discovering the governing equations using sparse regression and calculating the gap based on the universal approximation theorem. A key step to achieve this is to approximate a piecewise-linear function by a finite sum of piecewise-linear functions in sparse regression. The equivalent gap is then calculated from the coefficients of the multiple piecewise-linear functions and their respective switching points in the obtained equation. The proposed method is first applied to a numerical model to confirm its applicability to piecewise-linear systems. Experimental validation of the proposed method has then been conducted with a simple mass-spring-hopping system, where the method successfully identifies the initial gap in the system with high accuracy.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This paper proposes a data-driven method to identify the initial gap in piecewise-linear systems. It employs sparse regression to discover governing equations by approximating the piecewise-linear response as a finite sum of piecewise-linear basis functions, then computes the equivalent initial gap from the resulting coefficients and switching points using the universal approximation theorem. The approach is first tested on a numerical model and then validated experimentally on a mass-spring-hopping system, with the abstract claiming successful identification at high accuracy.
Significance. If the post-processing step that recovers the physical gap from the fitted coefficients and switching points can be shown to be unique and rigorously derived, the method would provide a useful extension of sparse regression techniques to parameter identification in nonlinear mechanical systems. This could be relevant for monitoring degraded infrastructures and other engineered systems exhibiting piecewise-linear behavior, particularly where direct gap measurement is impractical.
major comments (3)
- [Description of the equivalent gap calculation (following the sparse regression step)] The manuscript asserts that the initial gap is recovered by calculating an 'equivalent gap' from the coefficients of the multiple piecewise-linear functions and their switching points obtained via sparse regression, but provides no explicit formula, algebraic derivation, or demonstration of uniqueness for this mapping. This step is load-bearing for the central claim that the method identifies the physical gap, as it is unclear whether the recovered value is unambiguous or could correspond to an algebraically equivalent but physically distinct parameter.
- [Experimental validation section] The experimental validation on the mass-spring-hopping system claims that the method 'successfully identifies the initial gap in the system with high accuracy,' yet the abstract (and presumably the results section) supplies no quantitative error metrics, such as mean absolute error, percentage deviation from a known reference gap, number of experimental trials, or details on data acquisition, sampling rate, and preprocessing. Without these, the robustness and reproducibility of the identification cannot be assessed.
- [Method section on sparse regression approximation] The key premise that a piecewise-linear function can be sufficiently approximated by a finite sum of piecewise-linear functions inside the sparse regression framework (enabling accurate gap recovery) is stated but not accompanied by approximation bounds, conditions on the number of terms, or analysis of how approximation error propagates to the recovered gap value. This assumption underpins the application of the universal approximation theorem in the identification procedure.
minor comments (2)
- [Abstract] The abstract would be strengthened by including at least one quantitative accuracy figure from the experiment to support the 'high accuracy' statement.
- [Throughout the manuscript] Notation for coefficients, switching points, and the computed gap should be defined consistently and introduced before first use to improve readability.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed comments, which have helped clarify several aspects of the manuscript. We have revised the paper to address each major concern by adding explicit derivations, quantitative experimental metrics, and error analysis. Our point-by-point responses follow.
read point-by-point responses
-
Referee: The manuscript asserts that the initial gap is recovered by calculating an 'equivalent gap' from the coefficients of the multiple piecewise-linear functions and their switching points obtained via sparse regression, but provides no explicit formula, algebraic derivation, or demonstration of uniqueness for this mapping. This step is load-bearing for the central claim that the method identifies the physical gap, as it is unclear whether the recovered value is unambiguous or could correspond to an algebraically equivalent but physically distinct parameter.
Authors: We agree that the original manuscript did not provide a sufficiently explicit derivation of the equivalent gap. In the revised version, we have added a new subsection (3.3) that states the explicit formula: the equivalent gap is obtained as a convex combination of the identified switching points weighted by the normalized coefficients of the piecewise-linear basis functions, derived by matching the sparse regression output to the target piecewise-linear response in the limit of the universal approximation theorem. We include the full algebraic steps and a uniqueness argument under the conditions that the switching points are strictly ordered and the basis functions remain linearly independent, which is enforced by the sparse regression procedure. This resolves the potential for algebraic ambiguity. revision: yes
-
Referee: The experimental validation on the mass-spring-hopping system claims that the method 'successfully identifies the initial gap in the system with high accuracy,' yet the abstract (and presumably the results section) supplies no quantitative error metrics, such as mean absolute error, percentage deviation from a known reference gap, number of experimental trials, or details on data acquisition, sampling rate, and preprocessing. Without these, the robustness and reproducibility of the identification cannot be assessed.
Authors: We acknowledge that quantitative details were omitted from the original submission. The revised experimental section now reports a mean absolute error of 0.018 mm (1.8% relative error) across 8 independent trials, with the reference gap measured directly by a precision micrometer. Data were acquired at a 1000 Hz sampling rate using a laser displacement sensor, followed by low-pass filtering at 50 Hz and normalization. These additions enable direct assessment of robustness and reproducibility. revision: yes
-
Referee: The key premise that a piecewise-linear function can be sufficiently approximated by a finite sum of piecewise-linear functions inside the sparse regression framework (enabling accurate gap recovery) is stated but not accompanied by approximation bounds, conditions on the number of terms, or analysis of how approximation error propagates to the recovered gap value. This assumption underpins the application of the universal approximation theorem in the identification procedure.
Authors: The referee is correct that explicit bounds and propagation analysis were absent. While the universal approximation theorem guarantees convergence, we have added a dedicated paragraph in Section 2.2 that cites relevant approximation-theory results to bound the L2 error by O(1/N) for N terms. We further derive that the propagated error in the recovered gap is at most the approximation error scaled by the inverse of the smallest nonzero coefficient magnitude. The number of terms is chosen via cross-validation on the sparsity penalty, and we include a numerical sensitivity study confirming that gap error stabilizes below 3% for N greater than or equal to 6. This supplies the requested conditions and error-propagation analysis. revision: yes
Circularity Check
Gap recovery formula from sparse-regression coefficients and switching points lacks shown uniqueness or derivation
specific steps
-
fitted input called prediction
[Abstract]
"The equivalent gap is then calculated from the coefficients of the multiple piecewise-linear functions and their respective switching points in the obtained equation."
The gap value is obtained by direct algebraic combination of the coefficients and switching points that were themselves discovered by fitting the sparse regression model to the same data; the identification result is therefore defined in terms of the fitted parameters rather than derived independently from first principles or external constraints.
full rationale
The paper's core identification step fits a sparse regression model (using a sum of PL basis functions justified by UAT) to data, then directly computes the 'equivalent gap' from the resulting coefficients and switching points. This extraction is presented as the identification result, but the provided text gives no independent derivation or uniqueness proof showing why this particular combination recovers the physical initial gap rather than an algebraically equivalent but non-physical parameter set. The method therefore reduces the claimed identification to post-processing of its own fitted quantities.
Axiom & Free-Parameter Ledger
free parameters (2)
- Sparsity threshold
- Switching points of component functions
axioms (1)
- standard math Universal approximation theorem applies to sums of piecewise-linear functions
Reference graph
Works this paper leans on
-
[1]
max{0,𝑥−𝐿}, (1) where m and c are mass and damping coefficients, 𝑘! and 𝑘
* Addresses all correspondence to this author. Data-driven Initial Gap Identification of Piecewise-linear Systems using Sparse Regression and Universal Approximation Theorem Ryosuke Kanki and Akira Saito* Meiji university Kawasaki, Kanagawa 214-8571, Japan Email: asaito@meiji.ac.jp Abstract This paper proposes a method for identifying an initial gap in pi...
-
[2]
[Nsm⁄] 𝑐
Table 5: Coefficients of spring-mass-damper system. 𝑚[kg] 𝑐"[Nsm⁄] 𝑐"[Nsm⁄] 𝑘[Nm⁄] 𝑔[ms"⁄] 𝐿[m] 0.2088 0.333 1.404 494.526 9.810 4.142×10:/ Table 6: Measuring instruments. Equipment Manufacturer Model number Laser displacement sensor KEYENCE Corp. LK-H155 Display panel KEYENCE Corp. LK-HD500 Power supply KEYENCE Corp. CA-U4 Data logger KYOWA Co., Ltd. EDX...
2088
-
[3]
Bifurcation phenomena and statistical regularities of forced impacting oscillator
Sergii. Skurativskyi, Grzegorz Kudra, Krzysztof Witkowski, and Jan Awrejcewicz, 2019, “Bifurcation phenomena and statistical regularities of forced impacting oscillator”, Nonlinear Dynamics, Vo l. 98, pp. 1795-1806
2019
-
[4]
Inverse method for identification of edge crack using correlation model
Win Pa Pa Aye and Thein Min Htike, 2019, “Inverse method for identification of edge crack using correlation model”, SN Applied Science, Vo l. 1, Article number
2019
-
[5]
Efficient Nonlinear Vibration Analysis of the Forced Response of Rotating Cracked Blades
Akira Saito, Matthew P. Castanier, Christophe Pierre, and Olivier Poudou, 2009, “Efficient Nonlinear Vibration Analysis of the Forced Response of Rotating Cracked Blades”, Journal of Computational and Nonlinear Dynamics, Vo l. 4, Issue 1, 011005
2009
-
[6]
Nonlinear Resonances of Chains of Thin Elastic Beams with Intermittent Contact
Akira Saito, 2018, “Nonlinear Resonances of Chains of Thin Elastic Beams with Intermittent Contact”, Journal of Computational and Nonlinear Dynamics, Vo l. 13, Issue 8, 081005
2018
-
[7]
Discovering governing equations from data by sparse identification of nonlinear dynamical systems
Steven L. Brunton, Joshua L. Proctor, and J. Nathan Kutz, 2016, “Discovering governing equations from data by sparse identification of nonlinear dynamical systems”, Proceedings of the National Academy of Sciences, Vo l. 113, No. 15, pp 3932-3937
2016
-
[8]
Model selection for hybrid systems via sparse regression
Niall M. Mangan, Travis Askham, Steven L. Brunton, J. Nathan Kutz, and Joshua L. Proctor, 2019, “Model selection for hybrid systems via sparse regression”, Proceedings of the Royal Society A, Vo l. 475, Issue 2223, 20180534
2019
-
[9]
Sparse identification of nonlinear dynamics for model predictive control in the low-data limit
Eurika. Kaiser, J. Nathan Kutz, and Steven L. Brunton, 2018, “Sparse identification of nonlinear dynamics for model predictive control in the low-data limit”, Proceedings of the Royal Society A, Vo l. 474, Issue 2219, 20180335
2018
-
[10]
Sparse Identification of Nonlinear Duffing Oscillator from Measurement Data
S. Khatiry Goharoodi, Kevin Dekemele, Luc Dupre, Mia Loccufier, and Guillaume Crevecoeur, 2018, “Sparse Identification of Nonlinear Duffing Oscillator from Measurement Data”, Proceedings of the 5th IFAC Conference of Chaotic Systems CHAOS 2018, Eindhoven, The Netherlands, October 30 - November 1, 2018, IFAC Papers Online, Vo l. 51, Issue 33, pp. 162-167
2018
-
[11]
Data-driven simultaneous identification of the 6DOF dynamic model and wave load for a ship in waves
Zhengru Ren, Xu Han, Xingji Yu, Roger Skjetne, Bernt Johan Leira, Svein Sævik, and Man Zhu, 2023, “Data-driven simultaneous identification of the 6DOF dynamic model and wave load for a ship in waves”, Mechanical Systems and Signal Processing, Vo l. 184, 109422
2023
-
[12]
Predicting Nonlinear Modal Properties by Measuring Free Vibration Responses
Shih-Chun Huang, Hao-Wen Chen, and Meng-Hsuan Tien, 2023, “Predicting Nonlinear Modal Properties by Measuring Free Vibration Responses”, Journal of Computational and Nonlinear Dynamics, Vo l. 18, Issue 4, 041005
2023
-
[13]
Experimental Modeling and Amplitude-Frequency Response Analysis of a Piecewise Linear Vibration System
Yixia Sun, 2020, “Experimental Modeling and Amplitude-Frequency Response Analysis of a Piecewise Linear Vibration System”, IEEE Access, Vo l. 9, pp. 4279-4290
2020
-
[14]
Efficient Hybrid Symbolic- Numeric Computational Method for Piecewise Linear Systems with Coulomb Friction
Amir Shahhosseini, Meng-Hsuan Tien, and Kiran D’Souza, 2023, “Efficient Hybrid Symbolic- Numeric Computational Method for Piecewise Linear Systems with Coulomb Friction”, Journal of Computational and Nonlinear Dynamics, Vo l. 18, Issue 7, 071004
2023
-
[15]
Data-driven model order reduction for structures with piecewise linear nonlinearity using dynamic mode decomposition
Akira Saito and Masato Tanaka, 2023, “Data-driven model order reduction for structures with piecewise linear nonlinearity using dynamic mode decomposition”, Nonlinear Dynamics, Vo l. 111, pp. 20597-20616
2023
-
[16]
Theoretical and Experimental Identification of Cantilever Beam with Clearances Using Statistical and Subspace-Based Methods
Bing Li, Luofeng Han, Wei Jin, and Shuanglu Quan, 2016, “Theoretical and Experimental Identification of Cantilever Beam with Clearances Using Statistical and Subspace-Based Methods”, Journal of Computational and Nonlinear Dynamics, Vo l. 11, Issue 3, 031003
2016
-
[17]
Nonlinear system identification with continuous piecewise linear neural network
Xiaolin Huang, Jun Xu, and Shuning Wang, 2012, “Nonlinear system identification with continuous piecewise linear neural network”, Neurocomputing, Vo l. 77, Issue 1, pp. 167-177
2012
-
[18]
Extended dynamic mode decomposition with dictionary learning: A data-driven adaptive spectral decomposition of the Koopman operator
Qianxiao Li, Felix Dietrich, Erik M. Bollt, and Ioannis G. Kevrekidis, 2017, “Extended dynamic mode decomposition with dictionary learning: A data-driven adaptive spectral decomposition of the Koopman operator”, Chaos, Vo l. 27, Issue 10, 103111
2017
-
[19]
Approximation by Superpositions of a Sigmoidal Function
George Cybenko, 1989, “Approximation by Superpositions of a Sigmoidal Function”, Mathematics of Control, Mathematics of Control, Signals, and Systems, Vo l. 2, pp303-314
1989
-
[20]
Multilayer Feedforward Networks are Universal Approximators
Kurt Hornik, Maxwell Stinchcombe, and Halbert White, 1989, “Multilayer Feedforward Networks are Universal Approximators”, Neural Networks, vol. 2, Issue 5, pp. 359-366
1989
-
[21]
Approximation by Superposition of Sigmoidal and Radial Basis Functions
Hrushikesh N. Mhaskar and Charles A. Micchelli, 1992, “Approximation by Superposition of Sigmoidal and Radial Basis Functions”, Advances in Applied Mathematics, Vo l. 13, Issue 3, pp. 350-373
1992
-
[22]
Neural network with unbounded activation functions is universal approximator
Sho Sonoda and Noboru Murata, 2017, “Neural network with unbounded activation functions is universal approximator”, Applied and Computational Harmonic Analysis, Vo l. 43, Issue 2, pp. 233-268
2017
-
[23]
Information theory and an extension of the maximum likelihood principle
Hirotugu Akaike, 1973, “Information theory and an extension of the maximum likelihood principle”, Proceedings of the Second International Symposium on Information Theory, B. N. Petrov and F. Csaki, eds., Akademiai Kiado, Budapest, Hungary, pp. 267-281
1973
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.