Recognition: no theorem link
Dynamic Quantum-Assisted Co-Design of Control Tuning and Lyapunov Stability Synthesis for Nonlinear Systems
Pith reviewed 2026-05-12 02:38 UTC · model grok-4.3
The pith
A quantum-assisted method jointly redesigns controller gains and Lyapunov certificates online for nonlinear systems by first shrinking the search region and then solving an Ising model derived from a quadratic surrogate.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that controller parameters and Lyapunov-certificate parameters can be co-optimized at each decision epoch by first shrinking the admissible continuous region with Black-Hole calibration, building a finite binary representation over that region, fitting a local quadratic pseudo-Boolean surrogate to sampled closed-loop costs and Lyapunov penalties, converting the surrogate into an Ising Hamiltonian, solving it with quantum imaginary time evolution, decoding the resulting bitstrings, and finally re-evaluating the top candidates on the original nonlinear system before applying the update.
What carries the argument
The two-step computational structure consisting of Black-Hole-based calibration to contract the search region followed by construction of a finite binary representation and local quadratic pseudo-Boolean surrogate that yields an Ising-type Hamiltonian for quantum imaginary time evolution.
If this is right
- The framework can accommodate different Lyapunov decay specifications simply by changing the stability penalty term.
- Decoded candidates are always re-evaluated on the original nonlinear closed-loop system to limit dependence on the surrogate.
- The same structure applies without modification to first-order nonlinear consensus, second-order nonlinear consensus, and induction-motor drive control.
- Joint redesign of control and Lyapunov parameters occurs repeatedly at successive decision epochs rather than in separate offline stages.
Where Pith is reading between the lines
- If the Black-Hole calibration reliably contracts the region, the method could scale to higher-dimensional parameter spaces where brute-force search becomes intractable.
- The approach might be combined with model predictive control by treating Lyapunov parameters as additional decision variables inside each receding horizon.
- Testing on systems with faster time-varying disturbances would show whether periodic recalibration maintains stability when the operating point drifts between epochs.
- Replacing the quantum imaginary time evolution step with a classical Ising solver would allow direct measurement of any quantum advantage on these particular control instances.
Load-bearing premise
The local quadratic pseudo-Boolean surrogate, after Black-Hole calibration, sufficiently approximates the sampled nonlinear closed-loop evaluations so that the quantum solver produces candidates that improve performance and stability when re-evaluated on the original system.
What would settle it
Apply the method to the induction-motor drive example and check whether the re-evaluated closed-loop costs and Lyapunov penalties after each update are lower than those from a standard offline-tuned controller whose stability was verified separately.
Figures








read the original abstract
This paper proposes a dynamic quantum-assisted co-design framework for nonlinear closed-loop systems in which controller parameters and Lyapunov-certificate parameters are redesigned jointly at successive decision epochs. Unlike conventional nonlinear control designs that typically tune controller gains offline and verify stability separately, the proposed method embeds performance improvement and Lyapunov-based stability synthesis within a unified online optimization loop. The main novelty is a two-step computational structure that first contracts the continuous admissible search region around the current operating condition using a Black-Hole-based calibration procedure and then constructs a finite binary representation only over this calibrated region. The encoded objective is obtained from sampled nonlinear closed-loop evaluations and approximated by a local quadratic pseudo-Boolean surrogate, enabling an Ising-type Hamiltonian representation suitable for quantum-assisted optimization. Quantum imaginary time evolution is then used to explore the encoded Hamiltonian, and the resulting candidate bitstrings are decoded into continuous controller and Lyapunov parameters. To reduce dependence on the surrogate model, the decoded candidates are re-evaluated using the original nonlinear closed-loop cost and Lyapunov penalties before the final update is applied. The framework can accommodate different Lyapunov decay specifications by modifying the stability penalty and is validated on first-order nonlinear consensus, second-order nonlinear consensus, and induction-motor drive control examples. The implementation code used to generate the reported results is available at \href{https://github.com/LSU-RAISE-LAB/DQCLS-NS}{GitHub}.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a dynamic quantum-assisted co-design framework for nonlinear closed-loop systems in which controller parameters and Lyapunov-certificate parameters are jointly redesigned online at successive decision epochs. The core novelty is a two-step structure that first contracts the admissible parameter region around the current operating point via a Black-Hole-based calibration procedure, then encodes sampled nonlinear closed-loop evaluations into a local quadratic pseudo-Boolean surrogate that is mapped to an Ising Hamiltonian. Quantum imaginary time evolution explores this Hamiltonian; decoded candidate bitstrings are re-evaluated on the original nonlinear dynamics and Lyapunov penalties before the update is applied. The approach is illustrated on first-order nonlinear consensus, second-order nonlinear consensus, and induction-motor drive examples, with code released on GitHub.
Significance. If the surrogate fidelity after calibration is adequate and the re-evaluation step reliably recovers high-performing stable parameters, the framework offers a concrete route to embed quantum-assisted search inside an adaptive nonlinear control loop while preserving Lyapunov guarantees. The explicit separation between surrogate-guided search and final nonlinear verification, together with the open-source implementation, strengthens reproducibility and allows direct assessment of practical gains over purely classical co-design methods.
major comments (3)
- [§3.2] §3.2 (Surrogate construction): the local quadratic pseudo-Boolean approximation is stated to be built from sampled closed-loop evaluations inside the calibrated region, yet no quantitative fidelity metrics (hold-out MSE, ranking preservation of bitstrings, or worst-case pointwise error) are reported; because the quantum imaginary-time evolution operates exclusively on this surrogate, any systematic distortion directly affects which candidates are proposed for re-evaluation.
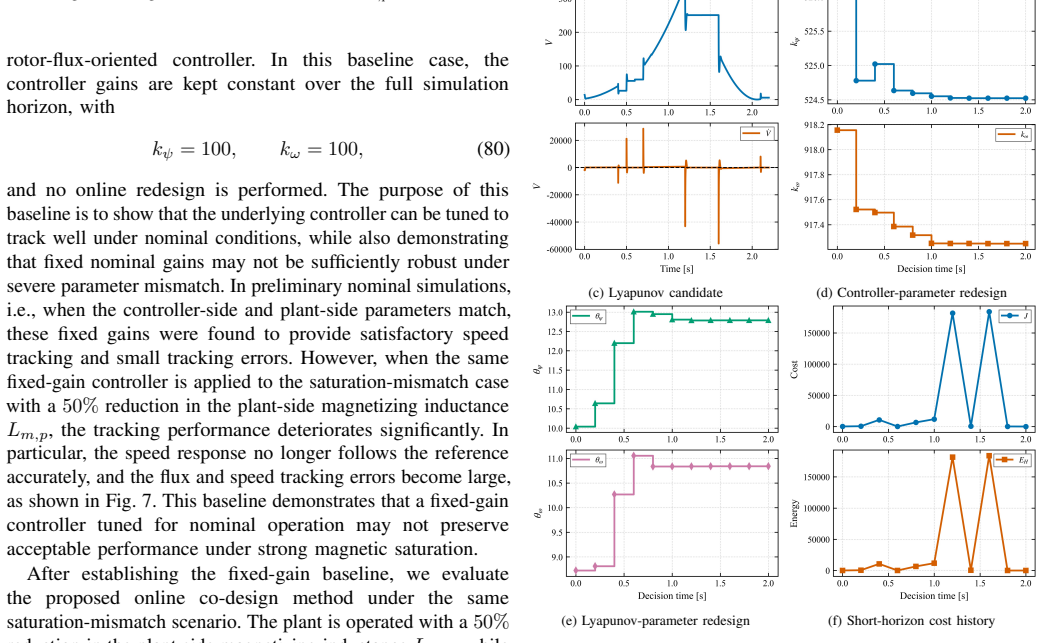
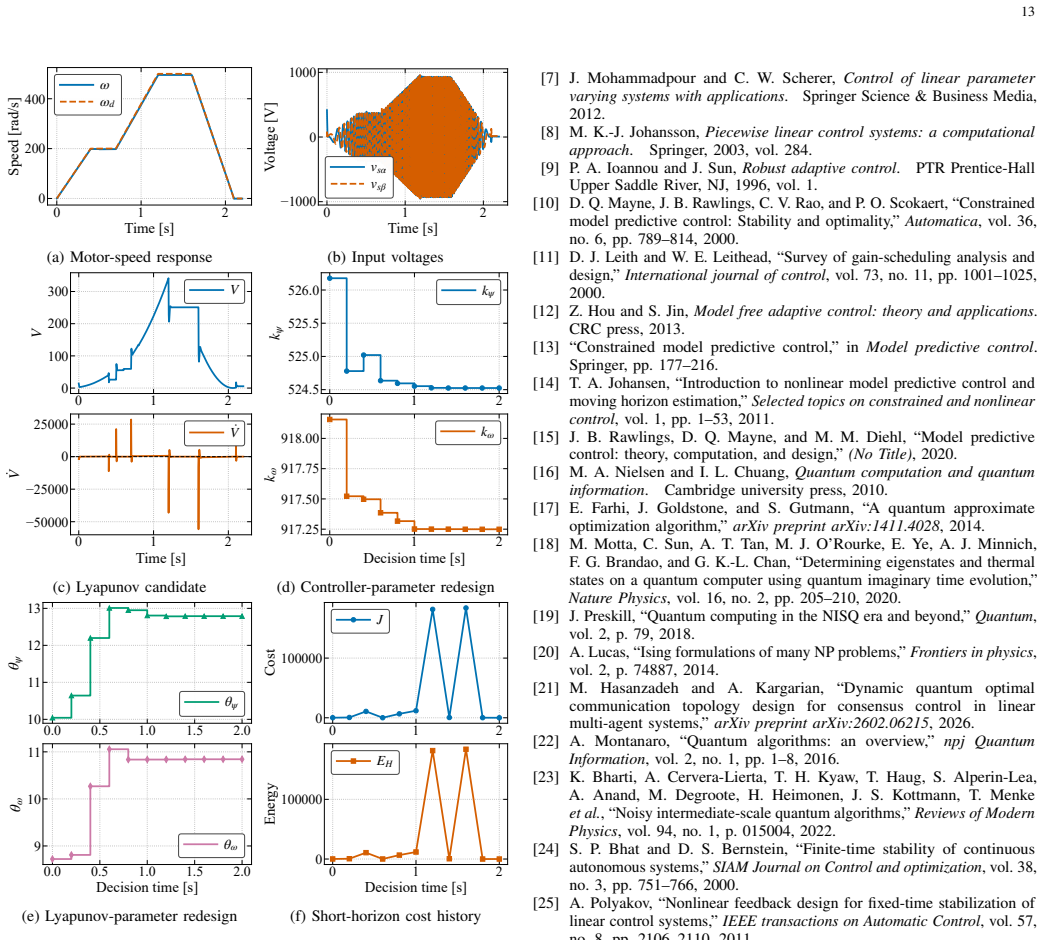
- [§5] §5 (Numerical examples): the three validation cases present qualitative trajectories and final parameter values but supply neither tabulated performance metrics (e.g., integrated cost, settling time, minimum Lyapunov decay rate) nor comparisons against classical nonlinear optimizers or Lyapunov-based tuning baselines; without these data it is impossible to determine whether the quantum-assisted candidates produce statistically meaningful improvements.
- [§4.1] §4.1 (Black-Hole calibration): the contraction mapping is described procedurally, but the manuscript does not quantify the resulting reduction in search-space volume or the sensitivity of the subsequent binary encoding to the calibration tolerance; these quantities are load-bearing for the claimed computational advantage of restricting the Ising Hamiltonian to a small calibrated region.
minor comments (2)
- [§3.2] Notation for the quadratic coefficients in the pseudo-Boolean surrogate is introduced without an explicit mapping from the continuous parameter vector to the binary variables; a small table or equation clarifying the encoding would improve readability.
- [§5] Figure captions for the example trajectories do not state the number of Monte-Carlo runs or the random-seed policy used to generate the plotted curves.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. We address each major comment point by point below, indicating the revisions we will make to improve the manuscript.
read point-by-point responses
-
Referee: [§3.2] §3.2 (Surrogate construction): the local quadratic pseudo-Boolean approximation is stated to be built from sampled closed-loop evaluations inside the calibrated region, yet no quantitative fidelity metrics (hold-out MSE, ranking preservation of bitstrings, or worst-case pointwise error) are reported; because the quantum imaginary-time evolution operates exclusively on this surrogate, any systematic distortion directly affects which candidates are proposed for re-evaluation.
Authors: We agree that quantitative fidelity metrics for the surrogate would strengthen the presentation. Although the re-evaluation of decoded candidates on the original nonlinear dynamics and Lyapunov penalties is intended to mitigate surrogate inaccuracies and preserve stability, we recognize that explicit metrics would allow readers to assess the approximation quality directly. In the revised manuscript we will add hold-out MSE, bitstring ranking preservation rates, and worst-case pointwise errors to Section 3.2, computed from the sampling procedure used in the numerical examples. revision: yes
-
Referee: [§5] §5 (Numerical examples): the three validation cases present qualitative trajectories and final parameter values but supply neither tabulated performance metrics (e.g., integrated cost, settling time, minimum Lyapunov decay rate) nor comparisons against classical nonlinear optimizers or Lyapunov-based tuning baselines; without these data it is impossible to determine whether the quantum-assisted candidates produce statistically meaningful improvements.
Authors: We acknowledge that tabulated quantitative metrics and baseline comparisons are necessary to demonstrate the practical benefits. The revised version will include tables reporting integrated cost, settling time, and minimum Lyapunov decay rate for each of the three examples. We will also add comparisons against classical co-design methods (e.g., particle-swarm or gradient-based optimization of the same joint objective) to quantify any improvements in performance and stability margins. revision: yes
-
Referee: [§4.1] §4.1 (Black-Hole calibration): the contraction mapping is described procedurally, but the manuscript does not quantify the resulting reduction in search-space volume or the sensitivity of the subsequent binary encoding to the calibration tolerance; these quantities are load-bearing for the claimed computational advantage of restricting the Ising Hamiltonian to a small calibrated region.
Authors: We agree that explicit quantification of the search-space contraction and its sensitivity would better support the claimed computational advantage. We will revise Section 4.1 to report the reduction in admissible volume (as a ratio or percentage) achieved by the Black-Hole calibration and will include a sensitivity study showing how calibration tolerance affects binary encoding length, Ising Hamiltonian size, and final closed-loop performance across the examples. revision: yes
Circularity Check
No significant circularity; derivation remains self-contained via external re-evaluation
full rationale
The paper's core loop encodes sampled nonlinear evaluations into a local quadratic surrogate for quantum optimization, then decodes and explicitly re-evaluates candidates on the original closed-loop system before acceptance. This breaks any potential reduction of final outputs to the surrogate fit. No self-definitional equations, fitted inputs renamed as predictions, or load-bearing self-citations that collapse the central claim are present in the described structure. The Black-Hole calibration and Ising encoding are presented as procedural steps supported by external quantum techniques rather than derived from the target result itself.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Lyapunov stability theory applies to the nonlinear closed-loop systems under consideration
- domain assumption Quantum imaginary time evolution can effectively minimize Ising-type Hamiltonians derived from the surrogate
Reference graph
Works this paper leans on
-
[1]
H. K. Khalil and J. W. Grizzle,Nonlinear systems. Prentice hall Upper Saddle River, NJ, 2002, vol. 3
work page 2002
-
[2]
Isidori,Nonlinear control systems: an introduction
A. Isidori,Nonlinear control systems: an introduction. Springer, 1985
work page 1985
-
[3]
A lyapunov-like characterization of asymptotic controllability,
E. D. Sontag, “A lyapunov-like characterization of asymptotic controllability,”SIAM journal on control and optimization, vol. 21, no. 3, pp. 462–471, 1983
work page 1983
-
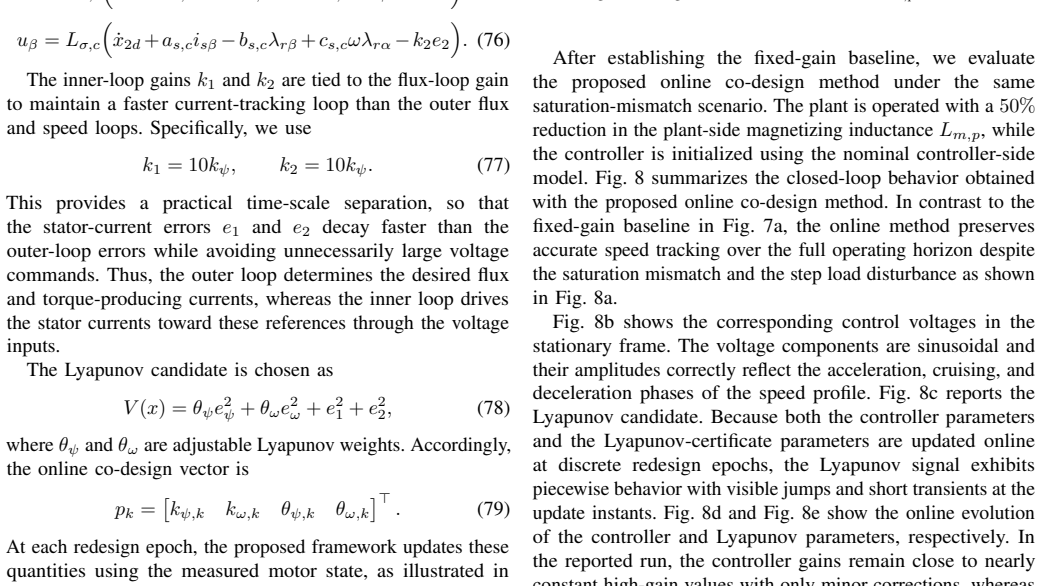
[4]
Asymptotic controllability implies feedback stabilization,
F. H. Clarke, Y . S. Ledyaev, E. D. Sontag, and A. I. Subbotin, “Asymptotic controllability implies feedback stabilization,”IEEE Transactions on Automatic Control, vol. 42, no. 10, pp. 1394–1407, 1997
work page 1997
-
[5]
Nonlinear model predictive control: A tutorial and survey,
J. B. Rawlings, E. S. Meadows, and K. R. Muske, “Nonlinear model predictive control: A tutorial and survey,”IFAC Proceedings Volumes, vol. 27, no. 2, pp. 185–197, 1994
work page 1994
-
[6]
PID control system analysis, design, and technology,
K. H. Ang, G. Chong, and Y . Li, “PID control system analysis, design, and technology,”IEEE transactions on control systems technology, vol. 13, no. 4, pp. 559–576, 2005
work page 2005
-
[7]
J. Mohammadpour and C. W. Scherer,Control of linear parameter varying systems with applications. Springer Science & Business Media, 2012
work page 2012
-
[8]
M. K.-J. Johansson,Piecewise linear control systems: a computational approach. Springer, 2003, vol. 284
work page 2003
-
[9]
P. A. Ioannou and J. Sun,Robust adaptive control. PTR Prentice-Hall Upper Saddle River, NJ, 1996, vol. 1
work page 1996
-
[10]
Constrained model predictive control: Stability and optimality,
D. Q. Mayne, J. B. Rawlings, C. V . Rao, and P. O. Scokaert, “Constrained model predictive control: Stability and optimality,”Automatica, vol. 36, no. 6, pp. 789–814, 2000
work page 2000
-
[11]
Survey of gain-scheduling analysis and design,
D. J. Leith and W. E. Leithead, “Survey of gain-scheduling analysis and design,”International journal of control, vol. 73, no. 11, pp. 1001–1025, 2000
work page 2000
- [12]
-
[13]
Constrained model predictive control,
“Constrained model predictive control,” inModel predictive control. Springer, pp. 177–216
-
[14]
Introduction to nonlinear model predictive control and moving horizon estimation,
T. A. Johansen, “Introduction to nonlinear model predictive control and moving horizon estimation,”Selected topics on constrained and nonlinear control, vol. 1, pp. 1–53, 2011
work page 2011
-
[15]
Model predictive control: theory, computation, and design,
J. B. Rawlings, D. Q. Mayne, and M. M. Diehl, “Model predictive control: theory, computation, and design,”(No Title), 2020
work page 2020
-
[16]
M. A. Nielsen and I. L. Chuang,Quantum computation and quantum information. Cambridge university press, 2010
work page 2010
-
[17]
A Quantum Approximate Optimization Algorithm
E. Farhi, J. Goldstone, and S. Gutmann, “A quantum approximate optimization algorithm,”arXiv preprint arXiv:1411.4028, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[18]
M. Motta, C. Sun, A. T. Tan, M. J. O’Rourke, E. Ye, A. J. Minnich, F. G. Brandao, and G. K.-L. Chan, “Determining eigenstates and thermal states on a quantum computer using quantum imaginary time evolution,” Nature Physics, vol. 16, no. 2, pp. 205–210, 2020
work page 2020
-
[19]
Quantum computing in the NISQ era and beyond,
J. Preskill, “Quantum computing in the NISQ era and beyond,”Quantum, vol. 2, p. 79, 2018
work page 2018
-
[20]
Ising formulations of many NP problems,
A. Lucas, “Ising formulations of many NP problems,”Frontiers in physics, vol. 2, p. 74887, 2014
work page 2014
-
[21]
M. Hasanzadeh and A. Kargarian, “Dynamic quantum optimal communication topology design for consensus control in linear multi-agent systems,”arXiv preprint arXiv:2602.06215, 2026
-
[22]
Quantum algorithms: an overview,
A. Montanaro, “Quantum algorithms: an overview,”npj Quantum Information, vol. 2, no. 1, pp. 1–8, 2016
work page 2016
-
[23]
Noisy intermediate-scale quantum algorithms,
K. Bharti, A. Cervera-Lierta, T. H. Kyaw, T. Haug, S. Alperin-Lea, A. Anand, M. Degroote, H. Heimonen, J. S. Kottmann, T. Menke et al., “Noisy intermediate-scale quantum algorithms,”Reviews of Modern Physics, vol. 94, no. 1, p. 015004, 2022
work page 2022
-
[24]
Finite-time stability of continuous autonomous systems,
S. P. Bhat and D. S. Bernstein, “Finite-time stability of continuous autonomous systems,”SIAM Journal on Control and optimization, vol. 38, no. 3, pp. 751–766, 2000
work page 2000
-
[25]
Nonlinear feedback design for fixed-time stabilization of linear control systems,
A. Polyakov, “Nonlinear feedback design for fixed-time stabilization of linear control systems,”IEEE transactions on Automatic Control, vol. 57, no. 8, pp. 2106–2110, 2011
work page 2011
-
[26]
Black hole: A new heuristic optimization approach for data clustering,
A. Hatamlou, “Black hole: A new heuristic optimization approach for data clustering,”Information sciences, vol. 222, pp. 175–184, 2013
work page 2013
-
[27]
Dynamic average consensus as distributed PDE-based control for multi-agent systems,
M. Hasanzadeh and S.-X. Tang, “Dynamic average consensus as distributed PDE-based control for multi-agent systems,” in2024 European Control Conference (ECC). IEEE, 2024, pp. 828–833
work page 2024
-
[28]
Consensus problems in networks of agents with switching topology and time-delays,
R. Olfati-Saber and R. M. Murray, “Consensus problems in networks of agents with switching topology and time-delays,”IEEE Transactions on automatic control, vol. 49, no. 9, pp. 1520–1533, 2004
work page 2004
-
[29]
Efficiency improved sensorless control scheme for electric vehicle induction motors,
M. Farasat, A. M. Trzynadlowski, and M. S. Fadali, “Efficiency improved sensorless control scheme for electric vehicle induction motors,”IET Electrical Systems in Transportation, vol. 4, no. 4, pp. 122–131, 2014
work page 2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.