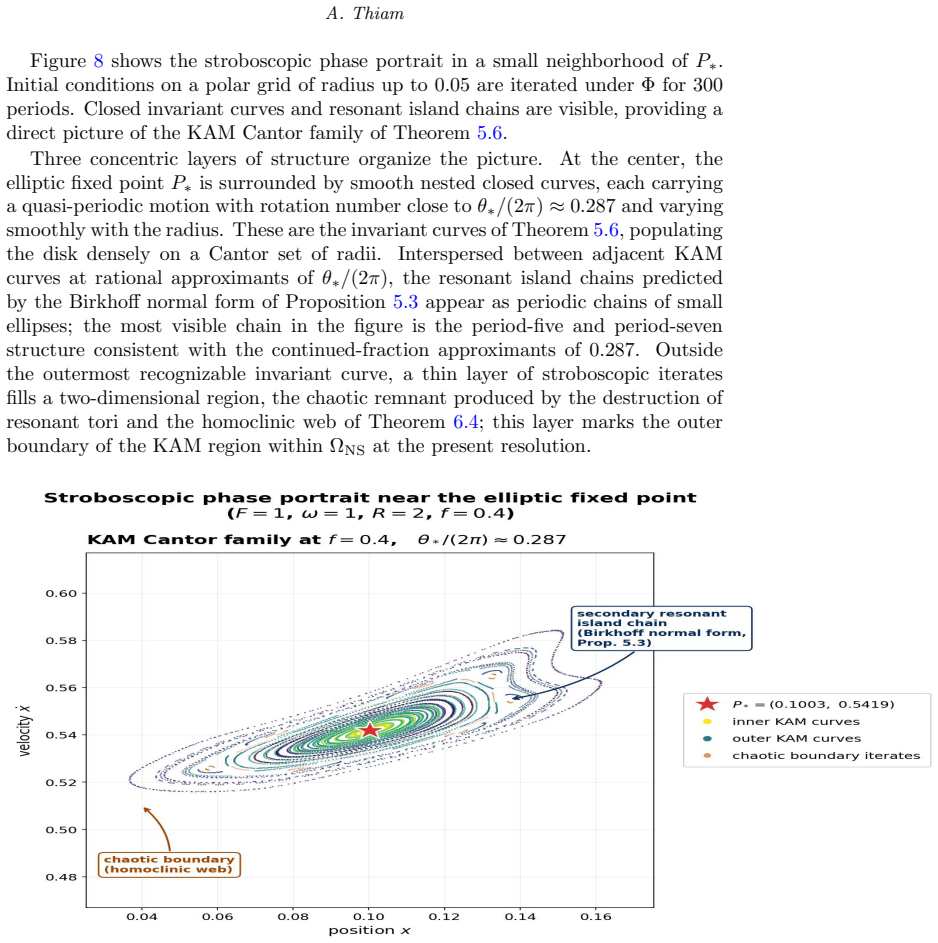
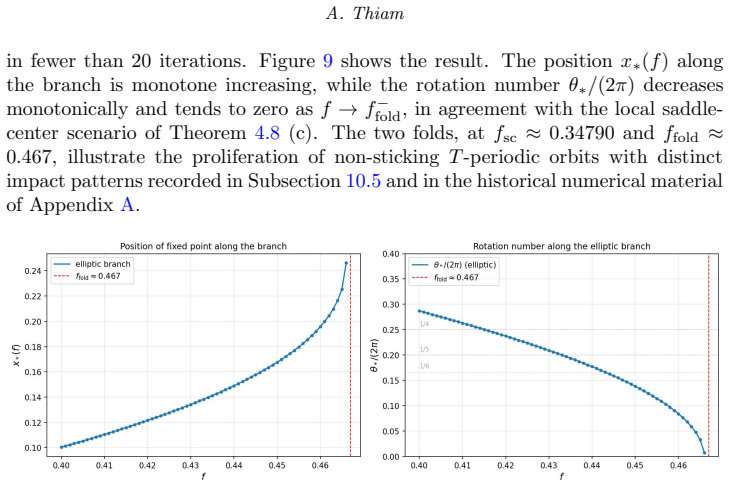
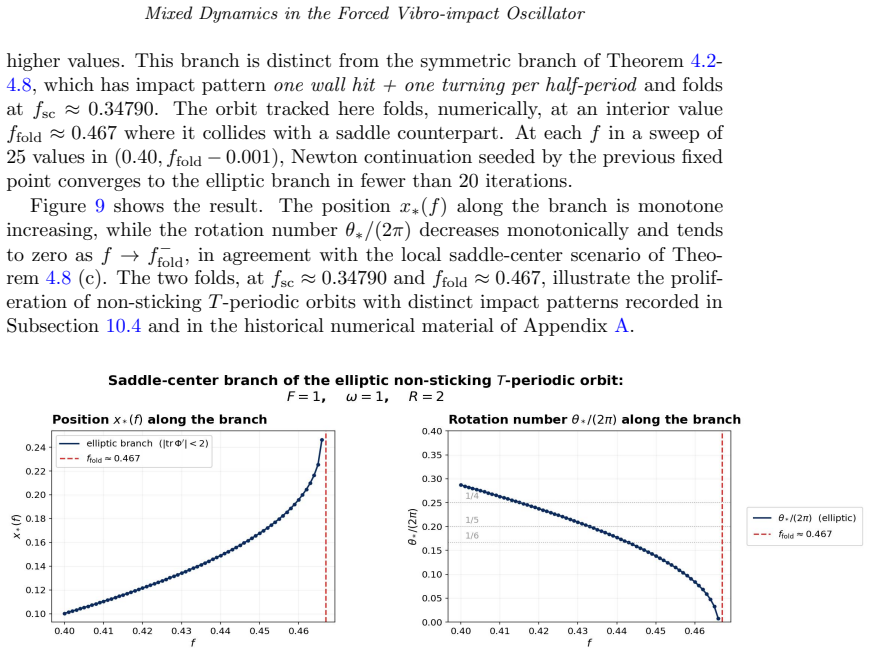
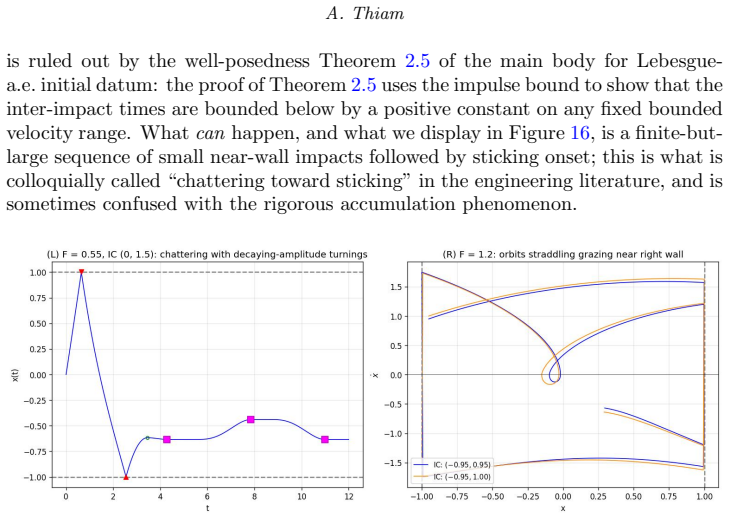
Recognition: no theorem link
Mixed Global Dynamics of the Forced Vibro-Impact Oscillator with Coulomb Friction and its Symplectic Structure, KAM Tori, and Persistence
Pith reviewed 2026-05-12 02:08 UTC · model grok-4.3
The pith
The time-T stroboscopic map of the forced vibro-impact oscillator with Coulomb friction is exact symplectic on the maximal non-sticking set.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
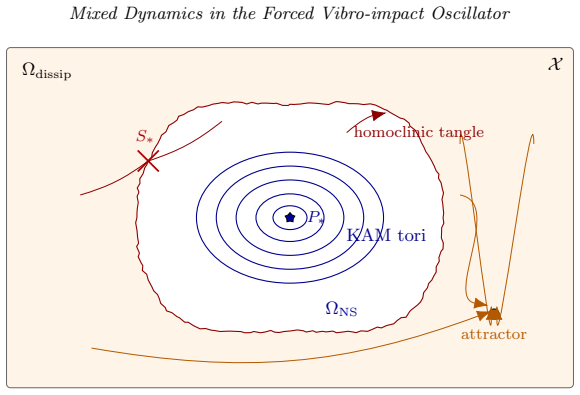
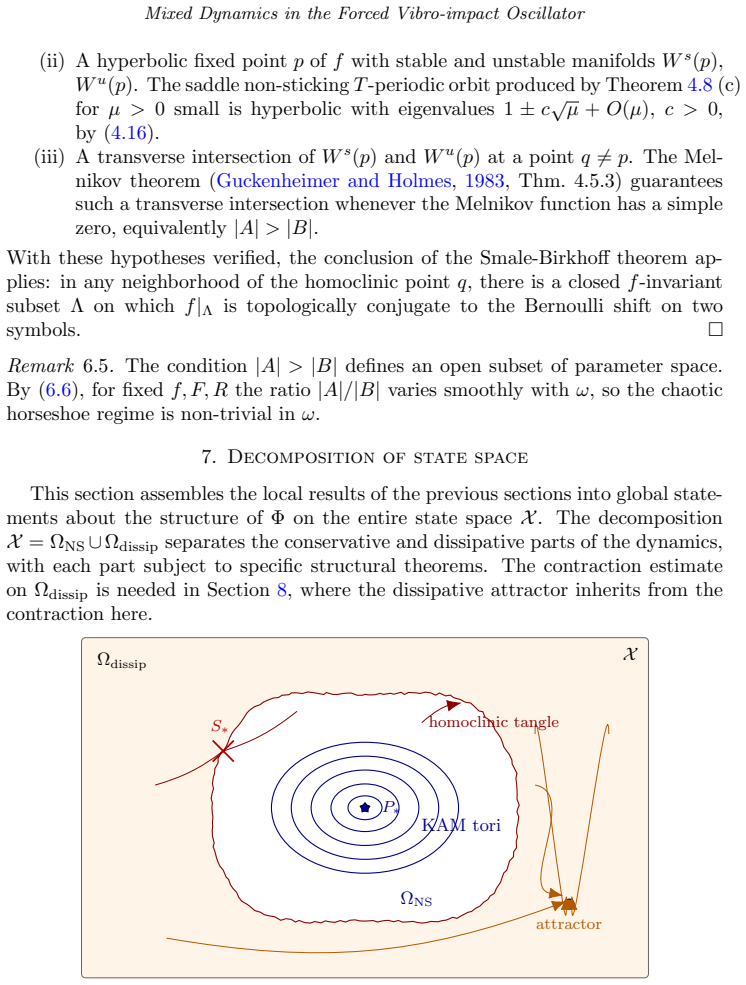
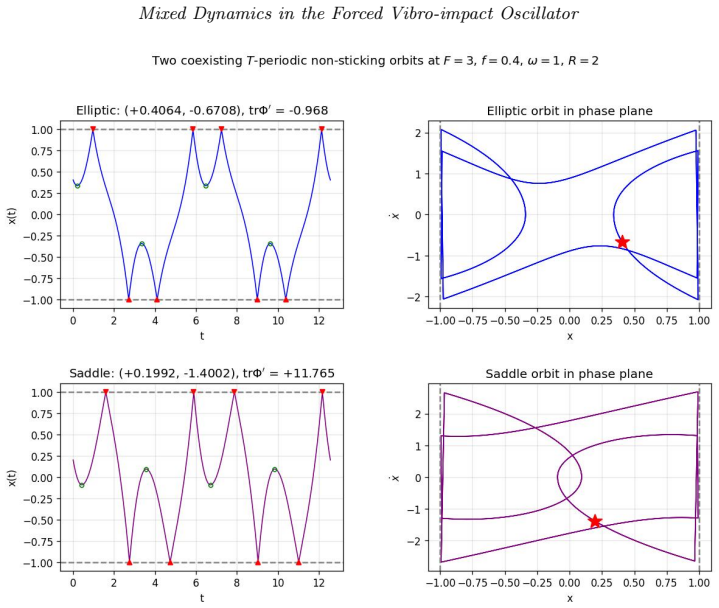
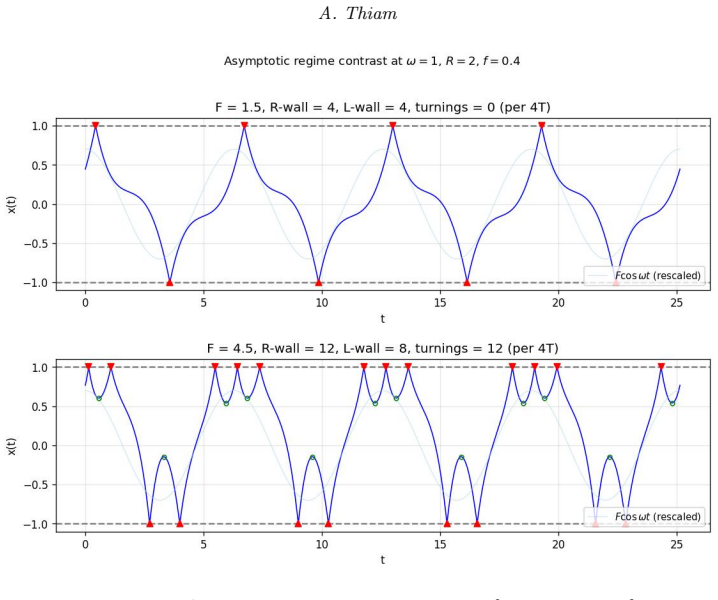
The central claim is that the time-T stroboscopic map is exact symplectic on the maximal forward-invariant non-sticking set of the Filippov flow. This property follows from lifting the system to a piecewise smooth Hamiltonian on a covering manifold. Moser's twist theorem then yields invariant Cantor families of KAM tori near elliptic non-sticking periodic orbits, and Melnikov analysis produces hyperbolic dynamics conjugate to a Bernoulli shift near the associated saddles. Symmetric T-periodic orbits are located by a closed-form equation that also locates a saddle-center bifurcation at a parameter value f_sc(F, ω, R).
What carries the argument
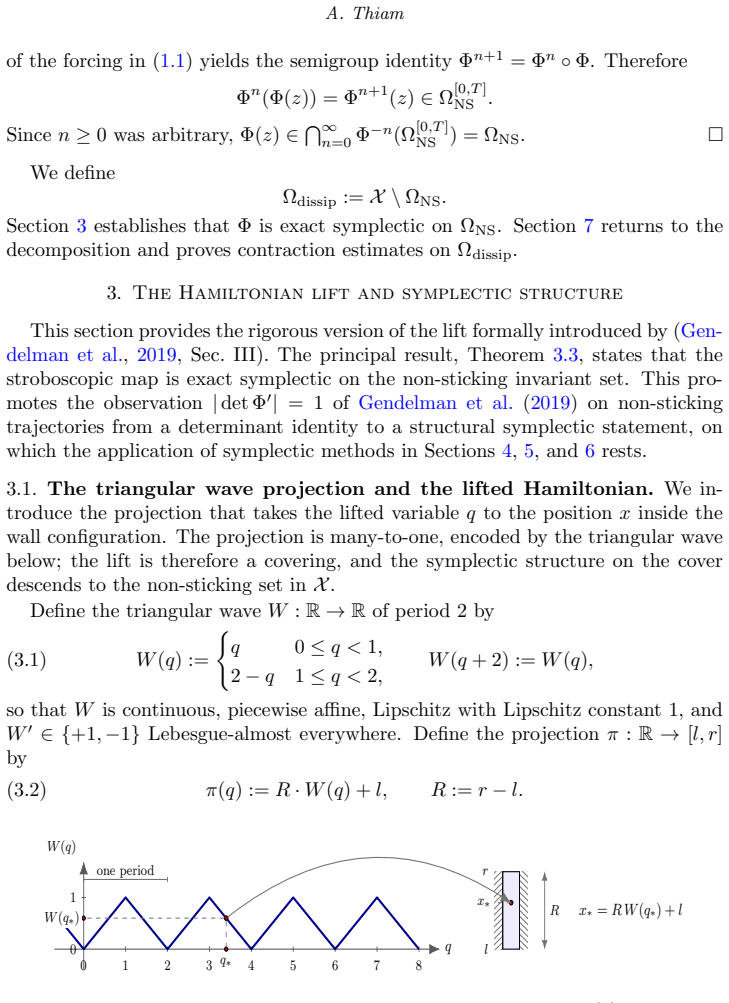
The exact symplectic structure of the time-T stroboscopic map on the maximal forward-invariant non-sticking set, obtained by lifting the Filippov flow to a piecewise smooth Hamiltonian system on a covering manifold.
If this is right
- KAM tori exist near elliptic non-sticking periodic orbits by Moser's twist theorem.
- Hyperbolic dynamics conjugate to a Bernoulli shift appear near associated saddles by Melnikov analysis.
- Symmetric T-periodic orbits satisfy a closed-form existence equation that also locates a parameter-dependent saddle-center bifurcation.
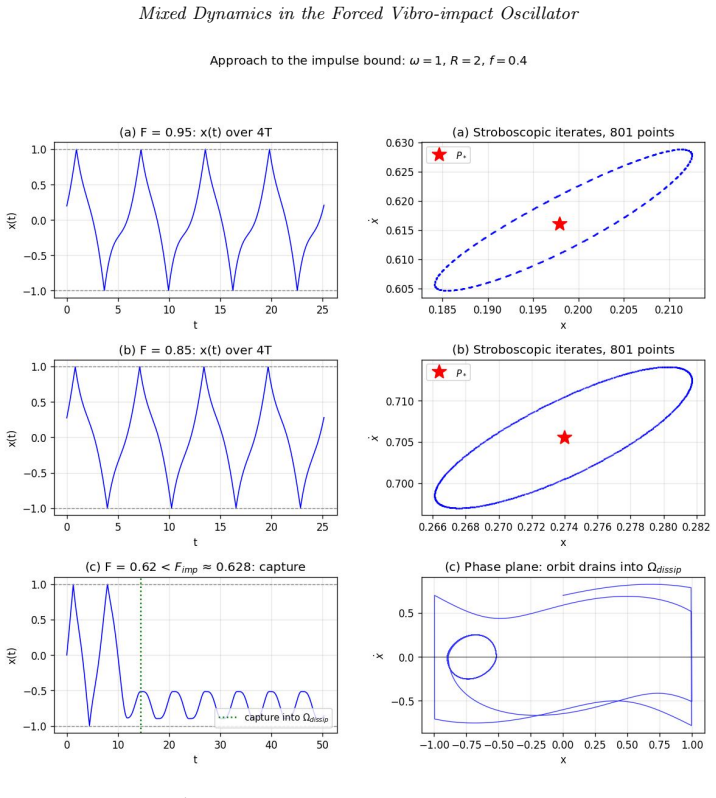
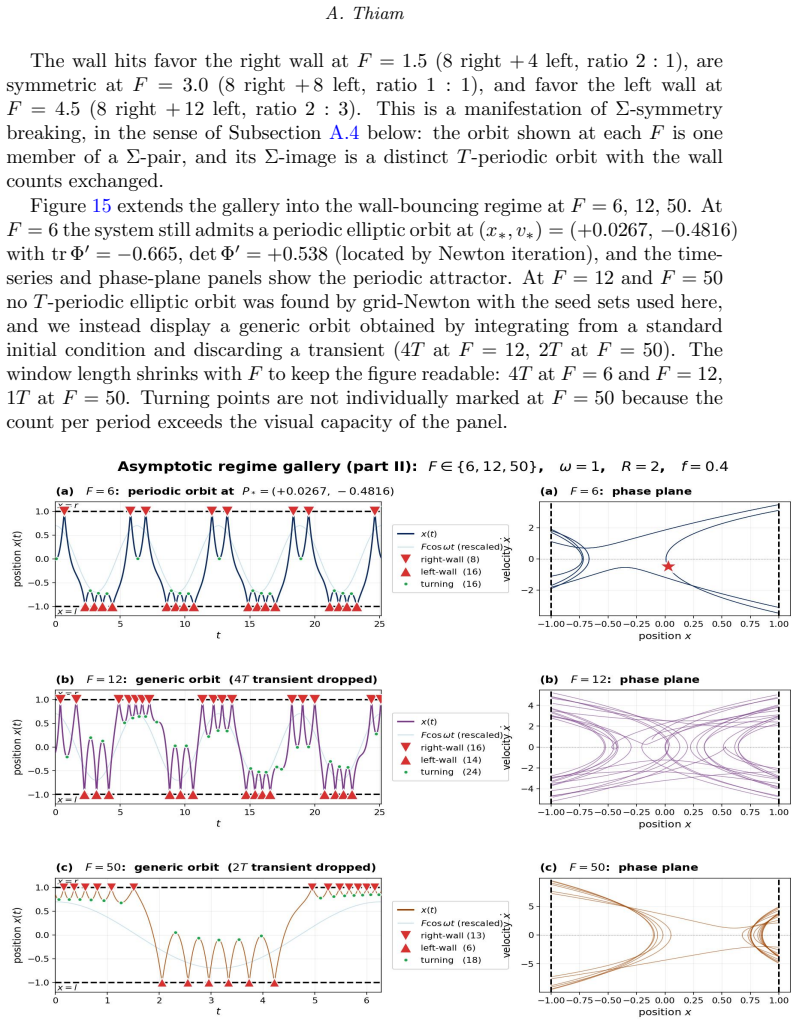
- Any positive restitution defect or viscous damping converts elliptic orbits into asymptotically stable attractors and replaces islands by a single basin.
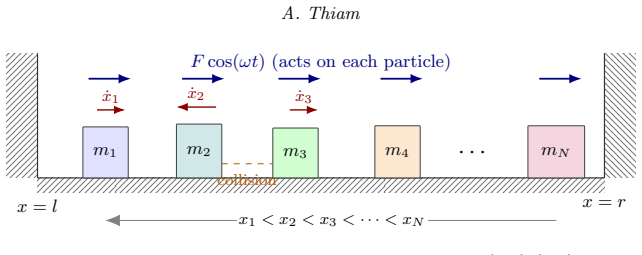
- The same symplectic structure and higher-dimensional KAM tori extend to multi-particle systems with elastic collisions.
Where Pith is reading between the lines
- The same covering-manifold lift may identify symplectic structure in other piecewise-smooth impact systems once sticking regions are excised.
- Computer-assisted verification of ellipticity can be repeated at additional parameter points to map the region where KAM tori exist.
- Real mechanical devices with even tiny viscosity will replace Hamiltonian islands by attractors, suggesting a design route to suppress or enhance stability via controlled damping.
- The approach supplies a template for proving mixed global dynamics in higher-dimensional systems whose friction laws permit an analogous Hamiltonian lift.
Load-bearing premise
The Filippov flow admits a global lift to a piecewise smooth Hamiltonian system on a covering manifold and the maximal forward-invariant non-sticking set is well-defined and forward-invariant.
What would settle it
Numerical integration of non-sticking trajectories showing that the Jacobian determinant of the stroboscopic map deviates from one, or computational failure to locate the predicted KAM tori near an elliptic periodic orbit at a parameter value where the twist condition holds.
Figures















read the original abstract
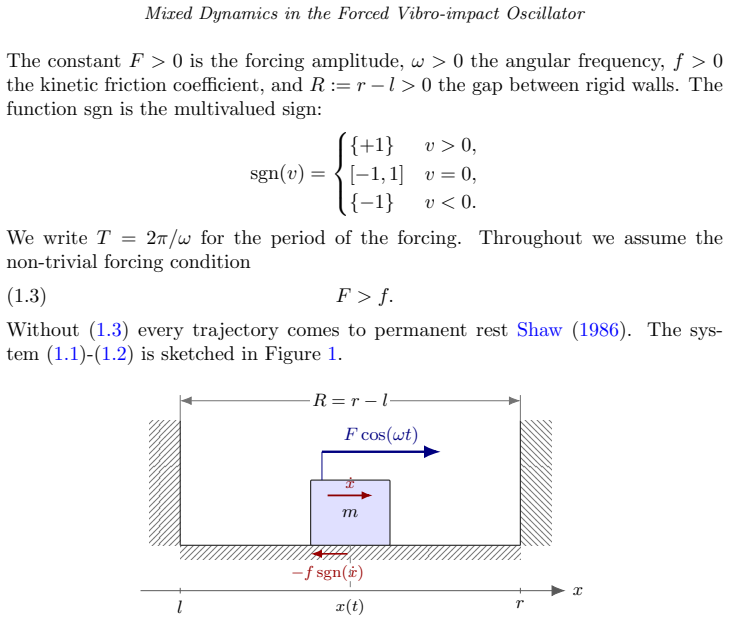
The forced vibro-impact oscillator with Amonton-Coulomb friction and elastic walls was shown by Gendelman et al. (2019) to exhibit a coexistence of Hamiltonian stability islands and dissipative attractors in a single phase space. We provide a complete mathematical analysis of this phenomenon. We prove global well-posedness of the associated Filippov flow and construct a global lift to a piecewise smooth Hamiltonian system on a covering manifold. On the maximal forward-invariant non-sticking set, we show that the time-$T$ stroboscopic map is exact symplectic, within the formalism of symplectic dynamics. We derive a closed-form existence equation for symmetric $T$-periodic orbits and establish a parameter-dependent saddle-center bifurcation at $f_{\rm sc}(F,\omega,R)$, correcting a universality claim in prior work. Using Moser's twist theorem, we prove the existence of invariant Cantor families (KAM tori) near elliptic non-sticking periodic orbits, while a Melnikov analysis yields hyperbolic dynamics conjugate to a Bernoulli shift near the associated saddle. We further show that any positive restitution defect or viscous damping destroys the conservative structure: elliptic periodic orbits persist but become asymptotically stable, replacing Hamiltonian islands by a single attracting basin. The approach extends to multi-particle systems with elastic collisions, where a symplectic structure and higher-dimensional KAM tori are obtained. A computer-assisted proof verifies the existence and ellipticity of a non-sticking periodic orbit at a specific parameter point.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper provides a mathematical analysis of the forced vibro-impact oscillator with Amonton-Coulomb friction, proving global well-posedness of the Filippov flow, constructing a global lift to a piecewise smooth Hamiltonian system on a covering manifold, and showing that the time-T stroboscopic map is exact symplectic on the maximal forward-invariant non-sticking set. It derives a closed-form existence equation for symmetric T-periodic orbits, establishes a parameter-dependent saddle-center bifurcation correcting prior universality claims, applies Moser's twist theorem to prove KAM tori near elliptic non-sticking periodic orbits, uses Melnikov analysis for hyperbolic dynamics near saddles, shows that restitution defects or viscous damping destroy the conservative structure, extends the approach to multi-particle systems, and includes a computer-assisted proof of existence and ellipticity for a specific non-sticking periodic orbit.
Significance. If the lift to the covering manifold and the exact symplecticity of the stroboscopic map are rigorously established, this work would be significant for providing a symplectic framework that explains the coexistence of Hamiltonian stability islands and dissipative attractors in a single non-smooth system with Coulomb friction. The closed-form bifurcation equation, correction to prior work, computer-assisted verification, and extension to multi-particle systems with higher-dimensional KAM tori represent concrete advances. The approach bridges non-smooth dynamics with classical symplectic geometry tools.
major comments (4)
- [Global lift and covering manifold construction] The global lift to a piecewise smooth Hamiltonian system on the covering manifold (central to §2-3) is load-bearing for the exact symplecticity claim. The manuscript must explicitly verify that this construction preserves the Filippov convexification at v=0 and correctly excises grazing trajectories from the non-sticking set; without this, the pulled-back symplectic form is not guaranteed to be preserved.
- [Symplecticity of the stroboscopic map] The proof that the time-T stroboscopic map is exact symplectic on the maximal forward-invariant non-sticking set (following the lift construction) requires an explicit calculation showing preservation of the symplectic form under the piecewise flow; the current outline invokes the formalism but lacks the detailed pullback verification needed to apply Moser's twist theorem.
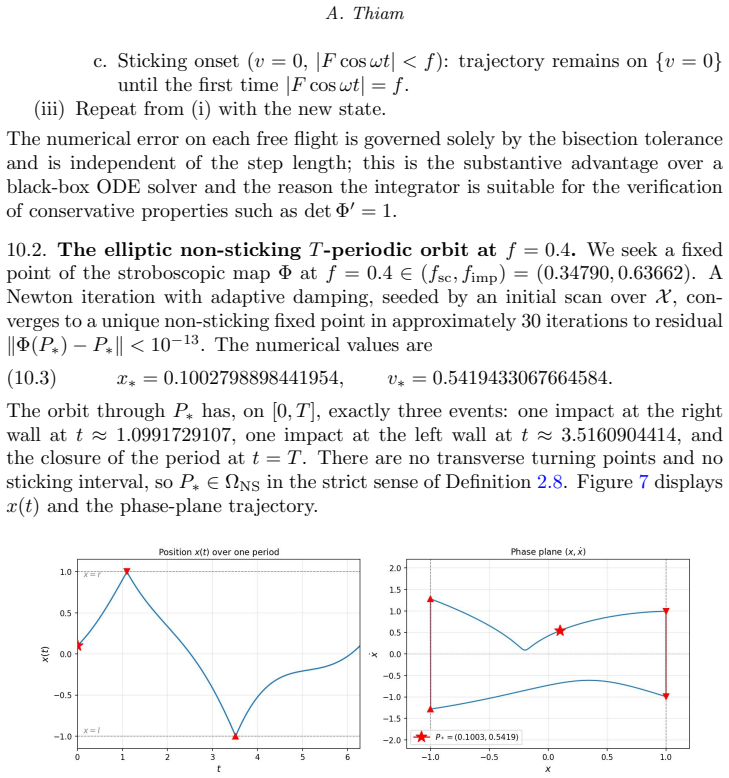
- [Computer-assisted verification] The computer-assisted proof of existence and ellipticity of a non-sticking periodic orbit (final section) reports no error estimates, interval arithmetic bounds, or the specific parameter values (F, ω, R) used. These are required to confirm the non-degeneracy condition for Moser's theorem and to make the verification reproducible.
- [Periodic orbits and bifurcation analysis] The closed-form existence equation for symmetric T-periodic orbits and the saddle-center bifurcation locus f_sc(F, ω, R) are derived from the system equations, but the manuscript should include a direct comparison showing how this corrects the universality claim in Gendelman et al. (2019) without hidden parameter restrictions.
minor comments (3)
- Clarify the notation for the restitution coefficient and the friction parameter R consistently from the introduction onward.
- Add explicit theorem citations (e.g., specific statement of Moser's twist theorem and the Melnikov version employed) in the relevant sections.
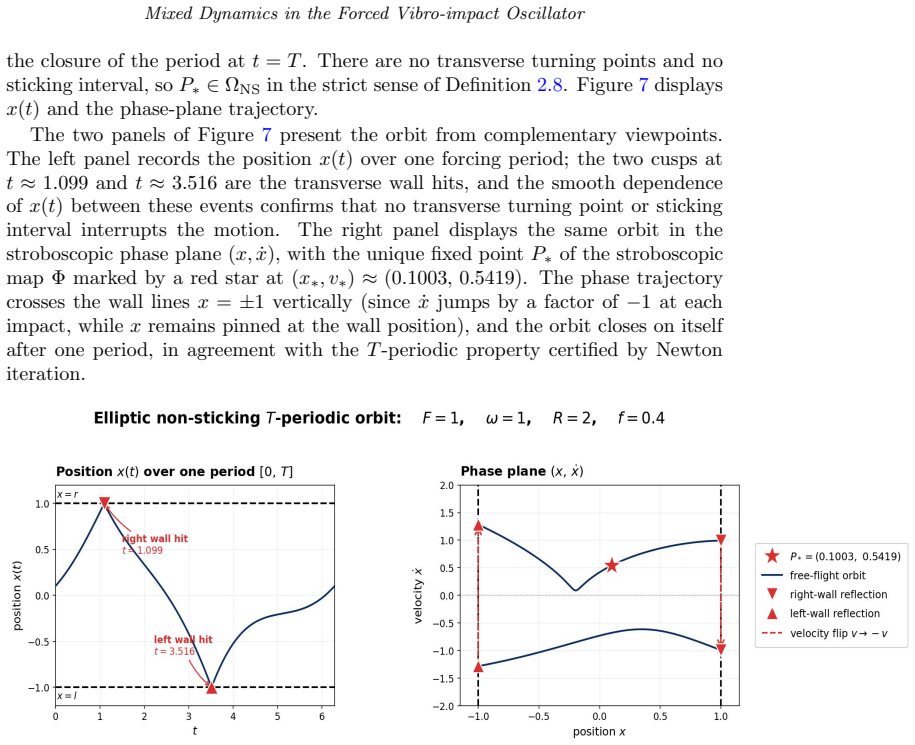
- Improve figure captions for phase portraits to indicate the non-sticking set boundaries and the location of the verified periodic orbit.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive report. We address each major comment point by point below, providing clarifications where the manuscript already contains the required elements and committing to explicit additions or expansions where needed to improve rigor and reproducibility.
read point-by-point responses
-
Referee: [Global lift and covering manifold construction] The global lift to a piecewise smooth Hamiltonian system on the covering manifold (central to §2-3) is load-bearing for the exact symplecticity claim. The manuscript must explicitly verify that this construction preserves the Filippov convexification at v=0 and correctly excises grazing trajectories from the non-sticking set; without this, the pulled-back symplectic form is not guaranteed to be preserved.
Authors: We agree that explicit verification is desirable for clarity. The lift in Sections 2–3 is constructed precisely so that the vector field at v=0 lies in the Filippov convex hull, and the non-sticking set is defined as the maximal forward-invariant set excluding grazing points (where velocity reaches zero with vanishing acceleration). To make this fully transparent, we will insert a short lemma in Section 2 that verifies preservation of the convexification and excision of grazings, confirming that the pulled-back symplectic form remains well-defined and invariant under the lifted flow. revision: yes
-
Referee: [Symplecticity of the stroboscopic map] The proof that the time-T stroboscopic map is exact symplectic on the maximal forward-invariant non-sticking set (following the lift construction) requires an explicit calculation showing preservation of the symplectic form under the piecewise flow; the current outline invokes the formalism but lacks the detailed pullback verification needed to apply Moser's twist theorem.
Authors: We will add the requested explicit pullback calculation in the revised Section 3. On each smooth piece the flow is Hamiltonian, hence symplectic; across the switching surfaces the lift ensures that the differential of the stroboscopic map preserves the form because the impact map is exact symplectic in the covering coordinates. This detailed verification will be written out step by step, directly supporting the subsequent application of Moser's twist theorem. revision: yes
-
Referee: [Computer-assisted verification] The computer-assisted proof of existence and ellipticity of a non-sticking periodic orbit (final section) reports no error estimates, interval arithmetic bounds, or the specific parameter values (F, ω, R) used. These are required to confirm the non-degeneracy condition for Moser's theorem and to make the verification reproducible.
Authors: We accept this criticism. The revised final section will state the concrete parameter triple (F, ω, R) at which the orbit is computed, report the interval-arithmetic bounds employed, and supply rigorous a-posteriori error estimates. These estimates will be shown to guarantee a strictly positive lower bound on the twist coefficient, thereby confirming the non-degeneracy hypothesis of Moser's theorem and rendering the computer-assisted proof fully reproducible. revision: yes
-
Referee: [Periodic orbits and bifurcation analysis] The closed-form existence equation for symmetric T-periodic orbits and the saddle-center bifurcation locus f_sc(F, ω, R) are derived from the system equations, but the manuscript should include a direct comparison showing how this corrects the universality claim in Gendelman et al. (2019) without hidden parameter restrictions.
Authors: We will expand the bifurcation discussion to include an explicit side-by-side comparison. We will demonstrate that the universality statement in Gendelman et al. (2019) holds only when the forcing amplitude remains below the threshold that keeps all orbits non-sticking; our closed-form equation f_sc(F, ω, R) = 0 gives the exact locus in the full three-dimensional parameter space without that restriction. The added paragraph will contain both the analytical argument and a brief numerical illustration of the difference. revision: yes
Circularity Check
No significant circularity; derivation is self-contained via explicit construction and external theorems.
full rationale
The paper constructs a global lift of the Filippov flow to a piecewise smooth Hamiltonian system on a covering manifold, then directly proves that the time-T stroboscopic map restricts to an exact symplectic diffeomorphism on the maximal forward-invariant non-sticking set. The closed-form existence equation for symmetric T-periodic orbits and the saddle-center bifurcation locus are obtained by solving the piecewise linear system equations. Moser's twist theorem and Melnikov analysis are applied as external results to the constructed map, with no reduction of these claims to quantities defined by the authors' own prior fits or self-citations. The extension to multi-particle systems and computer-assisted verification of a specific orbit are likewise independent of the input data. No steps match the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
axioms (3)
- standard math Moser's twist theorem applies to the exact symplectic stroboscopic map near elliptic periodic orbits
- standard math Melnikov method detects transverse homoclinics in the hyperbolic dynamics near the saddle
- domain assumption The Filippov regularization yields a globally well-posed flow for the Coulomb friction law
Reference graph
Works this paper leans on
-
[1]
Acary, V. and Brogliato, B. (2008). Numerical Methods for Nonsmooth Dynamical Systems: Applications in Mechanics and Electronics. Lecture Notes in Applied and Computational Mechanics 35. Springer, Berlin
work page 2008
-
[2]
Armstrong-H\'elouvry, B., Dupont, P., and Canudas De Wit, C. (1994). A survey of models, analysis tools and compensation methods for the control of machines with friction. Automatica 30, 1083-1138
work page 1994
-
[3]
Arnold, V.I. (1989). Mathematical Methods of Classical Mechanics. Second edition. Graduate Texts in Mathematics 60. Springer-Verlag, New York
work page 1989
-
[4]
Arnold, V.I., Vogtmann, K., and Weinstein, A. (2013). Mathematical Methods of Classical Mechanics. Graduate Texts in Mathematics. Springer Science & Business Media, New York
work page 2013
-
[5]
Aubin, J.-P. and Cellina, A. (1984). Differential Inclusions: Set-Valued Maps and Viability Theory. Grundlehren der Mathematischen Wissenschaften 264. Springer-Verlag, Berlin
work page 1984
-
[6]
Awrejcewicz, J. and Lamarque, C.-H. (2003). Bifurcation and Chaos in Nonsmooth Mechanical Systems. World Scientific Series on Nonlinear Science, Series A, 45. World Scientific, Singapore
work page 2003
-
[7]
Babitsky, V.I. (1998). Theory of Vibro-Impact Systems and Applications. Foundations of Engineering Mechanics. Springer-Verlag, Berlin
work page 1998
-
[8]
Bangert, V. (1988). Mather sets for twist maps and geodesics on tori. Dynamics Reported 1, 1-56
work page 1988
-
[9]
Benettin, G., Galgani, L., Giorgilli, A., and Strelcyn, J.-M. (1980). Lyapunov characteristic exponents for smooth dynamical systems and for Hamiltonian systems: A method for computing all of them. Meccanica 15, 9-30
work page 1980
-
[10]
Bensoussan, A. and Lions, J.-L. (1984). Impulse Control and Quasi-Variational Inequalities. Gauthier-Villars, Paris
work page 1984
-
[11]
Blazejczyk-Okolewska, B. and Kapitaniak, T. (1996). Dynamics of impact oscillator with dry friction. Chaos Solitons Fractals 7, 1455-1459
work page 1996
-
[12]
Bliman, P.-A. and Sorine, M. (1995). Easy-to-use realistic dry friction models for automatic control. In Proceedings of the 3rd European Control Conference, Rome, Italy, 3788-3794
work page 1995
-
[13]
Bourgain, J. (1997). On Melnikov's persistency problem. Mathematical Research Letters 4, 445-458
work page 1997
-
[14]
Brogliato, B. (2016). Nonsmooth Mechanics: Models, Dynamics and Control. Third edition. Communications and Control Engineering. Springer, Cham
work page 2016
-
[15]
Canudas De Wit, C., Olsson, H., str\"om, K.J., and Lischinsky, P. (1995). A new model for control of systems with friction. IEEE Transactions on Automatic Control 40, 419-425
work page 1995
-
[16]
Chierchia, L. and Perfetti, A. (1994). Maximal almost-periodic solutions for Lagrangian equations on infinite dimensional tori. In Seminar on Dynamical Systems, Progress in Nonlinear Differential Equations and Their Applications 12, 203-212. Birkh\"auser, Basel
work page 1994
-
[17]
Cone, K.M. and Zadoks, R.I. (1995). A numerical study of an impact oscillator with the addition of dry friction. Journal of Sound and Vibration 188, 659-683
work page 1995
-
[18]
Dahl, P.R. (1968). A solid friction model. Aerospace Corporation Report TOR-0158(3107-18), El Segundo, CA
work page 1968
-
[19]
Dankowicz, H. and Schilder, F. (2013). Recipes for Continuation. Computational Science and Engineering. SIAM, Philadelphia
work page 2013
-
[20]
Daza, A., Wagemakers, A., Georgeot, B., Gu\'ery-Odelin, D., and Sanju\'an, M.A.F. (2016). Basin entropy: A new tool to analyze uncertainty in dynamical systems. Scientific Reports 6, 31416
work page 2016
-
[21]
Del Magno, G., Gaiv\ ao, J.P., and Pereira, E. (2018). Hyperbolic polygonal billiards with finitely many ergodic SRB measures. Ergodic Theory and Dynamical Systems 38, 1758-1790
work page 2018
-
[22]
di Bernardo, M., Budd, C.J., Champneys, A.R., and Kowalczyk, P. (2008). Piecewise-smooth Dynamical Systems: Theory and Applications. Applied Mathematical Sciences 163. Springer-Verlag, London
work page 2008
-
[23]
Doedel, E.J. and Oldeman, B.E. (2012). AUTO-07P: Continuation and bifurcation software for ordinary differential equations. Concordia University, Montreal, Canada
work page 2012
-
[24]
Dolgopyat, D. (2012). Repulsion from resonances. M\'emoires de la Soci\'et\'e Math\'ematique de France 128, 1-119
work page 2012
-
[25]
Fan, J. and Yang, S. (2018). Dynamic behaviors of a 2-DOF nonlinear impact oscillator with one-sided constraint. International Journal of Bifurcation and Chaos 28, 1850116
work page 2018
-
[26]
Fidlin, A. (2006). Nonlinear Oscillations in Mechanical Engineering. Springer-Verlag, Berlin
work page 2006
-
[27]
Filippov, A.F. (1988). Differential Equations with Discontinuous Righthand Sides. Mathematics and its Applications (Soviet Series) 18. Kluwer Academic Publishers, Dordrecht
work page 1988
-
[28]
Fleming, W.H. and Soner, H.M. (2006). Controlled Markov Processes and Viscosity Solutions. Second edition. Stochastic Modelling and Applied Probability 25. Springer, New York
work page 2006
-
[29]
Fredriksson, M.H. and Nordmark, A.B. (2000). On normal form calculations in impact oscillators. Proceedings of the Royal Society of London Series A 456, 315-329
work page 2000
-
[30]
Freidlin, M.I. and Wentzell, A.D. (2012). Random Perturbations of Dynamical Systems. Third edition. Grundlehren der Mathematischen Wissenschaften 260. Springer, Heidelberg
work page 2012
-
[31]
Galperin, G., Kr\"uger, T., and Troubetzkoy, S. (1995). Local instability of orbits in polygonal and polyhedral billiards. Communications in Mathematical Physics 169, 463-473
work page 1995
-
[32]
Gendelman, O.V. and Manevitch, L.I. (2008). Nonlinear Targeted Energy Transfer in Mechanical and Structural Systems II. Solid Mechanics and its Applications 156. Springer, Dordrecht
work page 2008
-
[33]
Gendelman, O.V., Kravetc, P., and Rachinskii, D. (2019). Mixed global dynamics of forced vibro-impact oscillator with Coulomb friction. Chaos 29, 113116
work page 2019
-
[34]
Gonchenko, S.V., Shilnikov, L.P., and Turaev, D.V. (2008). On dynamical properties of multidimensional diffeomorphisms from Newhouse regions. Nonlinearity 21, 923-972
work page 2008
-
[35]
Gradshteyn, I.S. and Ryzhik, I.M. (2014). Table of Integrals, Series, and Products. Eighth edition. Edited by D. Zwillinger and V. Moll. Academic Press, Boston
work page 2014
-
[36]
Guckenheimer, J. and Holmes, P. (1983). Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields. Applied Mathematical Sciences 42. Springer-Verlag, New York
work page 1983
-
[37]
Hirsch, M.W., Pugh, C.C., and Shub, M. (1977). Invariant Manifolds. Lecture Notes in Mathematics 583. Springer-Verlag, Berlin
work page 1977
-
[38]
Hofbauer, F. and Sigmund, K. (1998). Evolutionary Games and Population Dynamics. Cambridge University Press, Cambridge. [Auxiliary reference for the Birkhoff normal form material; see also Section 3 of Siegel and Moser, Lectures on Celestial Mechanics.]
work page 1998
-
[39]
Holmes, P.J. and Marsden, J.E. (1982). Horseshoes in perturbations of Hamiltonian systems with two degrees of freedom. Communications in Mathematical Physics 82, 523-544
work page 1982
-
[40]
Hungria, A., Lessard, J.-P., and Mireles James, J.D. (2016). Rigorous numerics for analytic solutions of differential equations: the radii polynomial approach. Mathematics of Computation 85, 1427-1459
work page 2016
-
[41]
Humphreys, J.E. (1990). Reflection Groups and Coxeter Groups. Cambridge Studies in Advanced Mathematics 29. Cambridge University Press, Cambridge
work page 1990
-
[42]
Ibrahim, R.A. (2009). Vibro-Impact Dynamics: Modeling, Mapping and Applications. Lecture Notes in Applied and Computational Mechanics 43. Springer-Verlag, Berlin
work page 2009
-
[43]
Johansson, F. (2017). Arb: efficient arbitrary-precision midpoint-radius interval arithmetic. IEEE Transactions on Computers 66, 1281-1292
work page 2017
-
[44]
Katok, A. and Hasselblatt, B. (1995). Introduction to the Modern Theory of Dynamical Systems. Encyclopedia of Mathematics and its Applications 54. Cambridge University Press, Cambridge
work page 1995
-
[45]
Khasminskii, R. (2012). Stochastic Stability of Differential Equations. Second edition. Stochastic Modelling and Applied Probability 66. Springer, Heidelberg
work page 2012
-
[46]
Kobrinskii, A.E. and Kobrinskii, A.A. (1973). Vibro-Impact Systems (in Russian). Nauka, Moscow
work page 1973
-
[47]
Kozlov, V.V. and Treshchev, D.V. (1991). Billiards: A Genetic Introduction to the Dynamics of Systems with Impacts. Translations of Mathematical Monographs 89. American Mathematical Society, Providence, RI
work page 1991
-
[48]
Kuehn, C. (2015). Multiple Time Scale Dynamics. Applied Mathematical Sciences 191. Springer, Cham
work page 2015
-
[49]
Kuznetsov, Yu.A. (2004). Elements of Applied Bifurcation Theory. Third edition. Applied Mathematical Sciences 112. Springer-Verlag, New York
work page 2004
-
[50]
Lamb, J.S.W. and Roberts, J.A.G. (1998). Time-reversal symmetry in dynamical systems: a survey. Physica D 112, 1-39
work page 1998
-
[51]
Leonel, E.D. and McClintock, P.V.E. (2005). A hybrid Fermi-Ulam-bouncer model. Journal of Physics A: Mathematical and General 38, 823-839
work page 2005
-
[52]
Lessard, J.-P. and Mireles James, J.D. (2020). A rigorous implicit C^1 Chebyshev integrator for delay equations. Journal of Dynamics and Differential Equations 32, 1939-1985
work page 2020
-
[53]
Lichtenberg, A.J. and Lieberman, M.A. (1992). Regular and Chaotic Dynamics. Second edition. Applied Mathematical Sciences 38. Springer-Verlag, New York
work page 1992
-
[54]
Luo, A.C.J. and Gegg, B.C. (2006a). Stick and non-stick periodic motions in periodically forced oscillators with dry friction. Journal of Sound and Vibration 291, 132-168
-
[55]
Luo, A.C.J. and Gegg, B.C. (2006b). Grazing phenomena in a periodically forced, friction-induced, linear oscillator. Communications in Nonlinear Science and Numerical Simulation 11, 777-802
-
[56]
Mather, J.N. (1991). Variational construction of orbits of twist diffeomorphisms. Journal of the American Mathematical Society 4, 207-263
work page 1991
-
[57]
Melnikov, V.K. (1963). On the stability of a center for time-periodic perturbations. Trudy Moskovskogo Matematicheskogo Obshchestva 12, 3-52
work page 1963
-
[58]
Meyer, K.R. and Hall, G.R. (1992). Introduction to Hamiltonian Dynamical Systems and the N -Body Problem. Applied Mathematical Sciences 90. Springer-Verlag, New York
work page 1992
-
[59]
Moser, J. (1962). On invariant curves of area-preserving mappings of an annulus. Nachrichten der Akademie der Wissenschaften G\"ottingen, Mathematisch-Physikalische Klasse II, 1-20
work page 1962
-
[60]
Moser, J. (1973). Stable and Random Motions in Dynamical Systems. Annals of Mathematics Studies 77. Princeton University Press, Princeton, NJ
work page 1973
-
[61]
Neishtadt, A.I. (1984). The separation of motions in systems with rapidly rotating phase. Journal of Applied Mathematics and Mechanics 48, 133-139
work page 1984
-
[62]
Nordmark, A.B. (1991). Non-periodic motion caused by grazing incidence in an impact oscillator. Journal of Sound and Vibration 145, 279-297
work page 1991
-
[63]
Politi, A., Oppo, G.-L., and Badii, R. (1986). Coexistence of conservative and dissipative behaviors in reversible dynamical systems. Physical Review A 33, 4055-4060
work page 1986
-
[64]
P\"oschel, J. (2001). A lecture on the classical KAM theorem. In Smooth Ergodic Theory and Its Applications, Proceedings of Symposia in Pure Mathematics 69, 707-732. American Mathematical Society, Providence, RI
work page 2001
-
[65]
Quispel, G.R.W. and Roberts, J.A.G. (1988). Reversible mappings of the plane. Physics Letters A 132, 161-163
work page 1988
-
[66]
Rump, S.M. (1999). INTLAB---INTerval LABoratory. In Developments in Reliable Computing, 77-104. Kluwer Academic Publishers, Dordrecht
work page 1999
-
[67]
Salamon, D.A. (2004). The Kolmogorov-Arnold-Moser theorem. Mathematical Physics Electronic Journal 10, Paper 3, 37 pp
work page 2004
-
[68]
Shaw, S.W. (1986). On the dynamic response of a system with dry friction. Journal of Sound and Vibration 108, 305-325
work page 1986
-
[69]
Siegel, C.L. and Moser, J.K. (1971). Lectures on Celestial Mechanics. Grundlehren der Mathematischen Wissenschaften 187. Springer-Verlag, New York
work page 1971
-
[70]
Sim\'anyi, N. (2009). Conditional proof of the Boltzmann-Sinai ergodic hypothesis. Inventiones Mathematicae 177, 381-413
work page 2009
-
[71]
Sinai, Ya.G. (1970). Dynamical systems with elastic reflections. Russian Mathematical Surveys 25, 137-189
work page 1970
-
[72]
Skokos, Ch. (2001). Alignment indices: a new, simple method to determine the ordered or chaotic nature of orbits. Journal of Physics A: Mathematical and General 34, 10029-10043
work page 2001
-
[73]
Skokos, Ch., Bountis, T.C., and Antonopoulos, Ch. (2007). Geometrical properties of local dynamics in Hamiltonian systems: the generalized alignment index (GALI) method. Physica D 231, 30-54
work page 2007
-
[74]
Stewart, D.E. (2000). Rigid-body dynamics with friction and impact. SIAM Review 42, 3-39
work page 2000
-
[75]
Tabachnikov, S. (1995). Billiards. Panoramas et Synth\`eses 1. Soci\'et\'e Math\'ematique de France, Paris
work page 1995
-
[76]
Treschev, D.V. (1997). Splitting of separatrices for a pendulum with rapidly oscillating suspension point. Russian Journal of Mathematical Physics 5, 63-98
work page 1997
-
[77]
Treschev, D. and Zubelevich, O. (2010). Introduction to the Perturbation Theory of Hamiltonian Systems. Springer Monographs in Mathematics. Springer-Verlag, Berlin
work page 2010
-
[78]
Tucker, W. (2011). Validated Numerics: A Short Introduction to Rigorous Computations. Princeton University Press, Princeton, NJ
work page 2011
-
[79]
Galias, Z. (2006). Counting low-period cycles for flows. International Journal of Bifurcation and Chaos 16, 2873-2886
work page 2006
-
[80]
Galias, Z. and Tucker, W. (2009). Validated study of the existence of short cycles for chaotic systems using symbolic dynamics and interval tools. International Journal of Bifurcation and Chaos 19, 4187-4194
work page 2009
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.