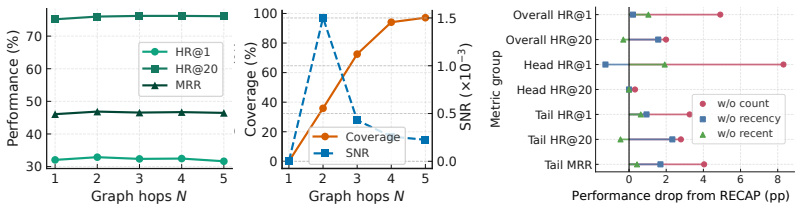
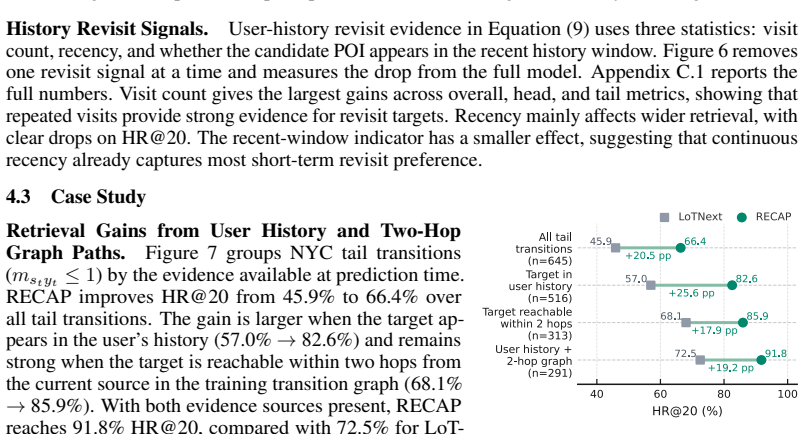
Recognition: unknown
Beyond Long Tail POIs: Transition-Centered Generalization for Human Mobility Prediction
Pith reviewed 2026-05-08 06:07 UTC · model grok-4.3
The pith
Transition sparsity between locations, not just rare destinations, is the core limit on accurate next-POI forecasts.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We argue that a core bottleneck in human mobility prediction lies in transition-level long-tail generalization. We formulate this problem as compositional generalization and propose RECAP, which reconstructs long-tail transitions from multi-hop transitivity in the global transition graph and revisit evidence from a user's historical trajectory. It further uses warm-transition holdout training to discourage memorization of frequent transitions and encourage generalization from transferable signals. Experiments show consistent accuracy gains, especially on tail transitions.
What carries the argument
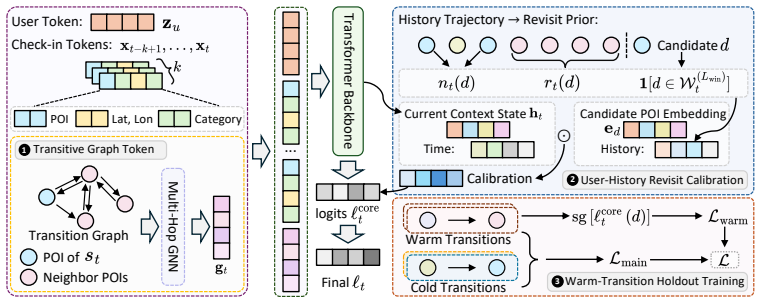
RECAP framework that reconstructs unseen source-destination transitions by combining multi-hop paths in the global transition graph with user-specific revisit records.
If this is right
- Prediction accuracy improves on real-world trajectory datasets, with clearest gains when the source-destination pair has never been seen in training.
- Models stop over-relying on memorizing popular transitions and instead use transferable graph and user signals.
- New visits to popular POIs become predictable when they arrive via previously unseen but reconstructible paths.
- The same reconstruction approach applies to multiple mobility datasets without domain-specific adjustments.
Where Pith is reading between the lines
- If the reconstruction holds, similar sparsity problems in other sequence tasks such as session-based recommendation or route planning could be addressed by extracting multi-hop and personal-history signals.
- Urban-planning tools that simulate city flows might gain reliability on unusual but plausible routes once transitions are rebuilt rather than treated as impossible.
- The warm-holdout trick could be tested as a general regularizer in any graph-based sequence model to push generalization over memorization.
Load-bearing premise
Multi-hop paths through the transition graph plus a user's past visits can rebuild accurate long-tail transitions without adding systematic errors or needing extra tuning.
What would settle it
Run RECAP on a dataset where all long-tail transitions are deliberately removed from the graph and user histories; if accuracy on those cases does not drop below a strong baseline that uses only frequency, the reconstruction claim is false.
Figures





read the original abstract
Human mobility prediction forecasts a user's next Point of Interest (POI) from historical trajectories, supporting applications from recommendation to urban planning. Recent studies have recognized the problem with long-tail POIs in human mobility prediction, which are POIs with few visit records, making new visits to such POIs difficult to predict. Our analysis shows that many predictions fail even for visits to popular POIs. The underlying cause is often transition-level sparsity: the corresponding source-destination transition appears rarely, or never appears, in the training set. We therefore argue that a core bottleneck in human mobility prediction lies in transition-level long-tail generalization. We formulate this problem as compositional generalization and propose a tRansition rEconstruction framework for Compositional generAlization in next-POI prediction (RECAP). RECAP reconstructs long-tail transitions from two generalizable signals: multi-hop transitivity in the global transition graph and revisit evidence from a user's historical trajectory. It further uses warm-transition holdout training to discourage memorization of frequent transitions and encourage generalization from transferable signals. Experiments on multiple real-world datasets show that RECAP consistently improves prediction accuracy, with clear gains on tail transitions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper argues that human mobility prediction suffers primarily from transition-level long-tail sparsity (rare or unseen source-destination pairs) rather than solely POI long-tail, formulates this as a compositional generalization task, and proposes the RECAP framework. RECAP reconstructs unseen transitions via multi-hop transitivity in the global transition graph combined with per-user revisit evidence, trained using a warm-transition holdout strategy to discourage memorization. Experiments on multiple real-world datasets report consistent accuracy gains, especially on tail transitions.
Significance. If the reconstruction mechanism holds without systematic bias, the work could meaningfully redirect mobility prediction research toward transition-centric generalization, with downstream value for recommendation and urban planning. Credit is due for the multi-dataset evaluation and explicit focus on tail-transition performance; these elements strengthen the practical relevance of the central claim.
major comments (3)
- [§4 Experiments] §4 Experiments: the reported accuracy improvements on tail transitions are presented without ablation studies that isolate the contribution of multi-hop transitivity versus user revisit evidence, nor with statistical significance tests or exact baseline specifications. This information is load-bearing for verifying that gains arise from the proposed compositional reconstruction rather than other modeling choices.
- [§3.3 and §4.2] §3.3 and §4.2: the central assumption that global multi-hop paths plus sparse revisit evidence faithfully reconstruct user-specific long-tail transitions is not directly tested; no metric (e.g., precision or recall of reconstructed edges against held-out ground truth) is reported to quantify reconstruction fidelity or to diagnose cases where the two signals conflict.
- [§3.2] §3.2: the warm-transition holdout training strategy is motivated as a guard against memorization, yet no sensitivity analysis on the holdout ratio or empirical check that it actually induces compositional rather than correlational learning is provided, leaving the generalization claim under-supported.
minor comments (2)
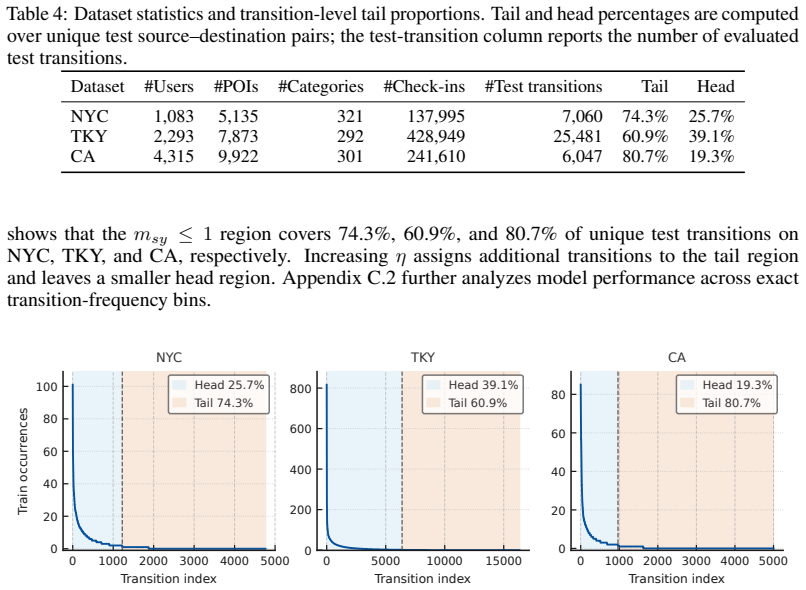
- [Problem formulation] The precise frequency threshold used to define 'long-tail transitions' should be stated explicitly in the problem formulation section for reproducibility.
- [Figure 2] Figure 2 (transition reconstruction diagram) would benefit from an accompanying equation or pseudocode that formalizes how multi-hop paths are aggregated with revisit counts.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback, which identifies key areas to strengthen the empirical support for RECAP's transition reconstruction approach. We address each major comment point by point below and will revise the manuscript accordingly to incorporate the requested analyses.
read point-by-point responses
-
Referee: [§4 Experiments] §4 Experiments: the reported accuracy improvements on tail transitions are presented without ablation studies that isolate the contribution of multi-hop transitivity versus user revisit evidence, nor with statistical significance tests or exact baseline specifications. This information is load-bearing for verifying that gains arise from the proposed compositional reconstruction rather than other modeling choices.
Authors: We agree that isolating the individual contributions is essential for validating the source of the gains. In the revised version, we will add ablation studies that separately disable the multi-hop transitivity module and the user revisit evidence module, reporting their effects specifically on tail-transition accuracy. We will also include statistical significance testing (e.g., paired t-tests over multiple random seeds) and provide complete baseline specifications, including exact hyperparameter settings and implementation references, to confirm that improvements derive from the compositional reconstruction mechanism. revision: yes
-
Referee: [§3.3 and §4.2] §3.3 and §4.2: the central assumption that global multi-hop paths plus sparse revisit evidence faithfully reconstruct user-specific long-tail transitions is not directly tested; no metric (e.g., precision or recall of reconstructed edges against held-out ground truth) is reported to quantify reconstruction fidelity or to diagnose cases where the two signals conflict.
Authors: We acknowledge that a direct fidelity evaluation would better substantiate the reconstruction assumption. We will add quantitative metrics in the revised paper, specifically precision and recall of reconstructed transitions evaluated against held-out ground-truth transitions. We will also analyze and report instances where the multi-hop and revisit signals conflict, providing diagnostic insights into the reconstruction process and its limitations. revision: yes
-
Referee: [§3.2] §3.2: the warm-transition holdout training strategy is motivated as a guard against memorization, yet no sensitivity analysis on the holdout ratio or empirical check that it actually induces compositional rather than correlational learning is provided, leaving the generalization claim under-supported.
Authors: We agree that further validation of the holdout strategy would strengthen the generalization claims. In the revision, we will include a sensitivity analysis varying the holdout ratio and report its impact on performance. We will also add empirical checks that contrast results on transitions requiring compositional inference versus those amenable to memorization, to demonstrate that the strategy promotes compositional rather than correlational learning. revision: yes
Circularity Check
No significant circularity in RECAP derivation or claims
full rationale
The paper proposes RECAP as a new framework that reconstructs long-tail transitions via multi-hop transitivity in the global graph plus per-user revisit evidence, trained under warm-transition holdout to promote generalization. No equations or steps reduce by construction to fitted parameters or prior self-citations; the reconstruction signals are external to the target predictions and the accuracy gains are reported from experiments on real-world datasets. The central claim of transition-level compositional generalization is therefore self-contained and externally falsifiable rather than tautological.
Axiom & Free-Parameter Ledger
free parameters (1)
- warm-transition holdout ratio
axioms (2)
- domain assumption Multi-hop paths in the global transition graph can be used to infer direct source-destination transitions for reconstruction.
- domain assumption User revisit evidence provides an independent generalizable signal for transition reconstruction.
Reference graph
Works this paper leans on
-
[1]
DeepMove: Predicting Human Mobility with Attentional Recurrent Networks
Jie Feng, Yong Li, Chao Zhang, Funing Sun, Fanchao Meng, Ang Guo, and Depeng Jin. DeepMove: Predicting Human Mobility with Attentional Recurrent Networks. InProceedings of the 2018 World Wide Web Conference, pages 1459–1468, 2018
2018
-
[2]
Dingqi Yang, Benjamin Fankhauser, Paolo Rosso, and Philippe Cudre-Mauroux. Location Prediction over Sparse User Mobility Traces Using RNNs: Flashback in Hidden States! In Proceedings of the 29th International Joint Conference on Artificial Intelligence, pages 2184– 2190, 2020
2020
-
[3]
Taming the Long Tail in Human Mobility Prediction
Xiaohang Xu, Renhe Jiang, Chuang Yang, Zipei Fan, and Kaoru Sezaki. Taming the Long Tail in Human Mobility Prediction. InProceedings of the 38th International Conference on Neural Information Processing Systems, pages 54748–54771, 2024
2024
-
[4]
STAN: Spatio-Temporal Attention Network for Next Location Recommendation
Yingtao Luo, Qiang Liu, and Zhaocheng Liu. STAN: Spatio-Temporal Attention Network for Next Location Recommendation. InProceedings of the Web Conference, pages 2177–2185, 2021
2021
-
[5]
Going Where, by Whom, and at What Time: Next Location Prediction Considering User Preference and Temporal Regularity
Tianao Sun, Ke Fu, Weiming Huang, Kai Zhao, Yongshun Gong, and Meng Chen. Going Where, by Whom, and at What Time: Next Location Prediction Considering User Preference and Temporal Regularity. InProceedings of the 30th ACM SIGKDD Conference on Knowledge Discovery and Data Mining, pages 2784–2793, 2024
2024
-
[6]
Learning Time Slot Preferences via Mobility Tree for Next POI Recommendation
Tianhao Huang, Xuan Pan, Xiangrui Cai, Ying Zhang, and Xiaojie Yuan. Learning Time Slot Preferences via Mobility Tree for Next POI Recommendation. InProceedings of the 38th AAAI Conference on Artificial Intelligence, pages 8535–8543, 2024
2024
-
[7]
ROTAN: A Rotation- based Temporal Attention Network for Time-Specific Next POI Recommendation
Shanshan Feng, Feiyu Meng, Lisi Chen, Shuo Shang, and Yew Soon Ong. ROTAN: A Rotation- based Temporal Attention Network for Time-Specific Next POI Recommendation. InProceed- ings of the 30th ACM SIGKDD Conference on Knowledge Discovery and Data Mining, pages 759–770, 2024
2024
-
[8]
Graph-Flashback Network for Next Location Recommendation
Xuan Rao, Lisi Chen, Yong Liu, Shuo Shang, Bin Yao, and Peng Han. Graph-Flashback Network for Next Location Recommendation. InProceedings of the 28th ACM SIGKDD Conference on Knowledge Discovery and Data Mining, pages 1463–1471, 2022
2022
-
[9]
GETNext: Trajectory Flow Map Enhanced Trans- former for Next POI Recommendation
Song Yang, Jiamou Liu, and Kaiqi Zhao. GETNext: Trajectory Flow Map Enhanced Trans- former for Next POI Recommendation. InProceedings of the 45th International ACM SIGIR Conference on Research and Development in Information Retrieval, pages 1144–1153, 2022
2022
-
[10]
Adaptive Graph Representation Learning for Next POI Recommendation
Zhaobo Wang, Yanmin Zhu, Chunyang Wang, Wenze Ma, Bo Li, and Jiadi Yu. Adaptive Graph Representation Learning for Next POI Recommendation. InProceedings of the 46th International ACM SIGIR Conference on Research and Development in Information Retrieval, pages 393–402, 2023
2023
-
[11]
Bi-Level Graph Structure Learning for Next POI Recommendation.IEEE Transactions on Knowledge and Data Engineering, 36(11):5695–5708, 2024
Liang Wang, Shu Wu, Qiang Liu, Yanqiao Zhu, Xiang Tao, Mengdi Zhang, and Liang Wang. Bi-Level Graph Structure Learning for Next POI Recommendation.IEEE Transactions on Knowledge and Data Engineering, 36(11):5695–5708, 2024
2024
-
[12]
Hyperbolic Variational Graph Auto-Encoder for Next POI Recommendation
Yuwen Liu, Lianyong Qi, Xingyuan Mao, Weiming Liu, Fan Wang, Xiaolong Xu, Xuyun Zhang, Wanchun Dou, Xiaokang Zhou, and Amin Beheshti. Hyperbolic Variational Graph Auto-Encoder for Next POI Recommendation. InProceedings of the ACM on Web Conference, pages 3267–3275, 2025
2025
-
[13]
Adaptive Location Hierarchy Learning for Long-Tailed Mobility Prediction
Yu Wang, Junshu Dai, Yuchen Ying, Hanyang Yuan, Zunlei Feng, Tongya Zheng, and Min- gli Song. Adaptive Location Hierarchy Learning for Long-Tailed Mobility Prediction. In Proceedings of the ACM Web Conference, pages 6493–6504, 2026
2026
-
[14]
Disentangled Graph Debiasing for Next POI Recommendation
Hailun Zhou, Jiajie Xu, Qiaoming Zhu, and Chengfei Liu. Disentangled Graph Debiasing for Next POI Recommendation. InProceedings of the 48th International ACM SIGIR Conference on Research and Development in Information Retrieval, pages 1779–1788, 2025. 10
2025
-
[15]
Modeling User Activity Preference by Leveraging User Spatial Temporal Characteristics in LBSNs.IEEE Transactions on Systems, Man, and Cybernetics: Systems, 45(1):129–142, 2015
Dingqi Yang, Daqing Zhang, Vincent W Zheng, and Zhiyong Yu. Modeling User Activity Preference by Leveraging User Spatial Temporal Characteristics in LBSNs.IEEE Transactions on Systems, Man, and Cybernetics: Systems, 45(1):129–142, 2015
2015
-
[16]
When Does Compositional Structure Yield Composi- tional Generalization? A Kernel Theory
Samuel Lippl and Kim Stachenfeld. When Does Compositional Structure Yield Composi- tional Generalization? A Kernel Theory. InThe 13th International Conference on Learning Representations, 2025
2025
-
[17]
Predicting the Next Location: A Recurrent Model with Spatial and Temporal Contexts
Qiang Liu, Shu Wu, Liang Wang, and Tieniu Tan. Predicting the Next Location: A Recurrent Model with Spatial and Temporal Contexts. InProceedings of the 30th AAAI Conference on Artificial Intelligence, pages 194–200, 2016
2016
-
[18]
REPLAY: Modeling Time-Varying Temporal Regularities of Human Mobility for Location Prediction over Sparse Trajectories.IEEE Transactions on Mobile Computing, 24(10):9428–9440, 2025
Bangchao Deng, Bingqing Qu, Pengyang Wang, Dingqi Yang, Benjamin Fankhauser, and Philippe Cudre-Mauroux. REPLAY: Modeling Time-Varying Temporal Regularities of Human Mobility for Location Prediction over Sparse Trajectories.IEEE Transactions on Mobile Computing, 24(10):9428–9440, 2025
2025
-
[19]
Disentangled And Personalized Representation Learning For Next Point-of-Interest Recommendation
Xuan Rao, Shuo Shang, Lisi Chen, Renhe Jiang, and Peng Han. Disentangled And Personalized Representation Learning For Next Point-of-Interest Recommendation. InProceedings of the 34th International Joint Conference on Artificial Intelligence, pages 7697–7705, 2025
2025
-
[20]
Next Point-of-Interest Recommendation with Temporal and Multi-Level Context Attention
Ranzhen Li, Yanyan Shen, and Yanmin Zhu. Next Point-of-Interest Recommendation with Temporal and Multi-Level Context Attention. In2018 IEEE International Conference on Data Mining, pages 1110–1115, 2018
2018
-
[21]
Geography-aware Sequential Location Recommendation
Defu Lian, Yongji Wu, Yong Ge, Xing Xie, and Enhong Chen. Geography-aware Sequential Location Recommendation. InProceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, pages 2009–2019, 2020
2009
-
[22]
Spatio-temporal Hypergraph Learning for Next POI Recommendation
Xiaodong Yan, Tengwei Song, Yifeng Jiao, Jianshan He, Jiaotuan Wang, Ruopeng Li, and Wei Chu. Spatio-temporal Hypergraph Learning for Next POI Recommendation. InProceedings of the 46th International ACM SIGIR Conference on Research and Development in Information Retrieval, pages 403–412, 2023
2023
-
[23]
Disentangled Contrastive Hypergraph Learning for Next POI Recommendation
Yantong Lai, Yijun Su, Lingwei Wei, Tianqi He, Haitao Wang, Gaode Chen, Daren Zha, Qiang Liu, and Xingxing Wang. Disentangled Contrastive Hypergraph Learning for Next POI Recommendation. InProceedings of the 47th International ACM SIGIR Conference on Research and Development in Information Retrieval, pages 1452–1462, 2024
2024
-
[24]
Multifaceted Scenario-Aware Hypergraph Learning for Next POI Recommendation
Yuxi Lin, Yongkang Li, Jie Xing, and Zipei Fan. Multifaceted Scenario-Aware Hypergraph Learning for Next POI Recommendation. InProceedings of the 40th AAAI Conference on Artificial Intelligence, pages 15269–15277, 2026
2026
-
[25]
Bias and Debias in Recommender System: A Survey and Future Directions.ACM Transactions on Information Systems, 41:1–39, 2023
Jiawei Chen, Hande Dong, Xiang Wang, Fuli Feng, Meng Wang, and Xiangnan He. Bias and Debias in Recommender System: A Survey and Future Directions.ACM Transactions on Information Systems, 41:1–39, 2023
2023
-
[26]
Causal Intervention for Leveraging Popularity Bias in Recommendation
Yang Zhang, Fuli Feng, Xiangnan He, Tianxin Wei, Chonggang Song, Guohui Ling, and Yongdong Zhang. Causal Intervention for Leveraging Popularity Bias in Recommendation. In Proceedings of the 44th international ACM SIGIR Conference on Research and Development in Information Retrieval, pages 11–20, 2021
2021
-
[27]
Improving Long-tail Item Recommen- dation with Graph Augmentation
Sichun Luo, Chen Ma, Yuanzhang Xiao, and Linqi Song. Improving Long-tail Item Recommen- dation with Graph Augmentation. InProceedings of the 32nd ACM International Conference on Information and Knowledge Management, pages 1707–1716, 2023
2023
-
[28]
MELT: Mutual Enhancement of Long-Tailed User and Item for Sequential Recommendation
Kibum Kim, Dongmin Hyun, Sukwon Yun, and Chanyoung Park. MELT: Mutual Enhancement of Long-Tailed User and Item for Sequential Recommendation. InProceedings of the 46th International ACM SIGIR Conference on Research and Development in Information Retrieval, pages 68–77, 2023
2023
-
[29]
Cross-Task Multimodal Rein- forcement for Long Tail Next POI Recommendation.IEEE Transactions on Multimedia, 26: 1996–2005, 2024
Jiangfeng Du, Silin Zhou, Jie Yu, Peng Han, and Shuo Shang. Cross-Task Multimodal Rein- forcement for Long Tail Next POI Recommendation.IEEE Transactions on Multimedia, 26: 1996–2005, 2024. 11
1996
-
[30]
How well does generative recommendation generalize?arXiv preprint arXiv:2603.19809, 2026
Yijie Ding, Zitian Guo, Jiacheng Li, Letian Peng, Shuai Shao, Wei Shao, Xiaoqiang Luo, Luke Simon, Jingbo Shang, Julian McAuley, and Yupeng Hou. How Well Does Generative Recommendation Generalize?arXiv preprint arXiv:2603.19809, 2026
-
[31]
IM-POI: Bridging ID and Multi-modal Gaps in Next POI Recommendation
Siyuan Huang, Jiahui Jin, Xin Lin, Xigang Sun, and Yukun Ban. IM-POI: Bridging ID and Multi-modal Gaps in Next POI Recommendation. InProceedings of the 33rd ACM International Conference on Multimedia, pages 5979–5987, 2025
2025
-
[32]
Not Too Little, Not Too Much: A Theoretical Analysis of Graph (Over) Smoothing
Nicolas Keriven. Not Too Little, Not Too Much: A Theoretical Analysis of Graph (Over) Smoothing. InProceedings of the 36th International Conference on Neural Information Processing System, pages 2268–2281, 2022
2022
-
[33]
Time-Aware Point-of-Interest Recommendation
Quan Yuan, Gao Cong, Zongyang Ma, Aixin Sun, and Nadia Magnenat-Thalmann. Time-Aware Point-of-Interest Recommendation. InProceedings of The 36th International ACM SIGIR Conference on Research and Development in Information Retrieval, pages 363–372, 2013
2013
-
[34]
Xinglei Wang, Meng Fang, Zichao Zeng, and Tao Cheng. Where Would I Go Next? Large Language Models as Human Mobility Predictors.arXiv preprint arXiv:2308.15197, 2023
-
[35]
Large Language Models for Next Point-of-Interest Recommendation
Peibo Li, Maarten de Rijke, Hao Xue, Shuang Ao, Yang Song, and Flora D Salim. Large Language Models for Next Point-of-Interest Recommendation. InProceedings of the 47th International ACM SIGIR Conference on Research and Development in Information Retrieval, pages 1463–1472, 2024
2024
-
[36]
NextLo- cLLM: Location Semantics Modeling and Coordinate-Based Next Location Prediction with LLMs
Shuai Liu, Ning Cao, Yile Chen, Yue Jiang, George Rosario Jagadeesh, and Gao Cong. NextLo- cLLM: Location Semantics Modeling and Coordinate-Based Next Location Prediction with LLMs. InProceedings of The International Workshop on Spatio-Temporal Data Intelligence and Foundation Models, The 34th ACM International Conference on Information and Knowledge Mana...
2025
-
[37]
Generative Next POI Recommendation with Semantic ID
Dongsheng Wang, Yuxi Huang, Shen Gao, Yifan Wang, Chengrui Huang, and Shuo Shang. Generative Next POI Recommendation with Semantic ID. InProceedings of the 31st ACM SIGKDD Conference on Knowledge Discovery and Data Mining, pages 2904–2914, 2025
2025
-
[38]
Fangye Wang, Haowen Lin, Yifang Yuan, Siyuan Wang, Xiaojiang Zhou, Song Yang, and Pengjie Wang. GeoGR: A Generative Retrieval Framework for Spatio-Temporal Aware POI Recommendation.arXiv preprint arXiv:2602.10411, 2026
-
[39]
R3-VAE: Reference Vector-Guided Rating Residual Quantization VAE for Generative Recommendation
Qiang Wan, Ze Yang, Dawei Yang, Ying Fan, Xin Yan, Siyang Liu, Yicong Liu, Chenwei Zhang, Wei Xu, Jiahao Qin, and Ke Wang. R3-V AE: Reference Vector-Guided Rating Residual Quantization V AE for Generative Recommendation.arXiv preprint arXiv:2604.11440, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[40]
Comapoi: A collaborative multi-agent framework for next poi prediction bridging the gap between trajectory and language
Lin Zhong, Lingzhi Wang, Xu Yang, and Qing Liao. Comapoi: A collaborative multi-agent framework for next poi prediction bridging the gap between trajectory and language. In Proceedings of the 48th International ACM SIGIR Conference on Research and Development in Information Retrieval, pages 1768–1778, 2025
2025
-
[41]
MAS4POI: A Multi-Agent Col- laboration System for Next POI Recommendation
Yuqian Wu, Yuhong Peng, Jiapeng Yu, and Raymond Lee. MAS4POI: A Multi-Agent Col- laboration System for Next POI Recommendation. InProceedings of the 29th Pacific-Asia Conference on Knowledge Discovery and Data Mining, pages 356–367. Springer, 2025. 12 A Additional Details of RECAP A.1 Notation Table 3 summarizes the symbols used in the paper. Table 3: Sym...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.