Recognition: no theorem link
Analytical solutions for some quadratic ODEs found via linear rational eigenfunctions and the rational eigenfunction variety
Pith reviewed 2026-05-11 00:49 UTC · model grok-4.3
The pith
Linear rational eigenfunctions produce closed-form solutions for families of quadratic ODEs via their algebraic variety.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
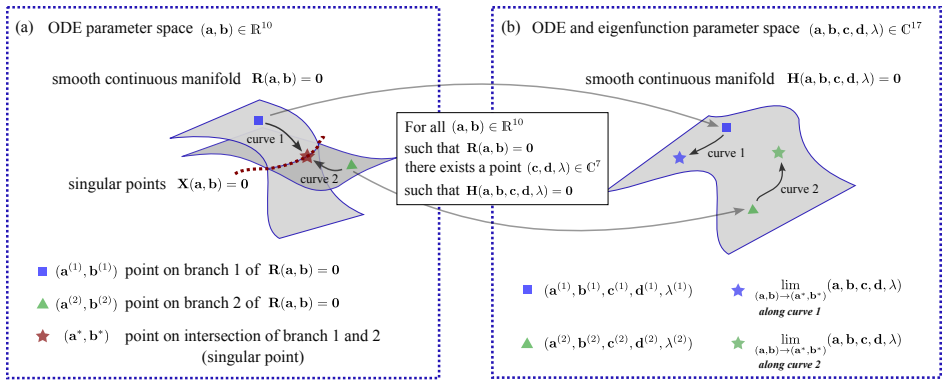
Imposing a linear rational ansatz on the Koopman eigenfunctions of a quadratic ODE converts the associated partial differential equation into a system of polynomial equations. The solution set to this system is the rational eigenfunction variety of the ODE. Solutions in this variety, when they exist, supply the explicit linear rational eigenfunctions needed to construct closed-form analytical solutions for the original quadratic system.
What carries the argument
The rational eigenfunction variety: the algebraic set of solutions to the polynomial system obtained by substituting the linear rational form into the Koopman eigenfunction equation.
If this is right
- Families of quadratic ODEs become solvable in closed form once their parameters place them in the rational eigenfunction variety.
- The variety supplies explicit algebraic relations that the ODE coefficients must obey for analytical solvability.
- The eigenfunctions themselves are constructed directly from the variety parameters, bypassing numerical integration.
- Algebraic geometry tools become available to classify which quadratic systems admit this exact treatment.
Where Pith is reading between the lines
- The same linear rational restriction might identify solvable cases among cubic or higher-degree polynomial ODEs if the resulting algebraic system remains tractable.
- One could check membership in the variety numerically to decide whether a given quadratic model should be solved analytically or numerically.
- The variety relations could guide parameter selection in applied models when exact solutions are preferred over simulation.
- Connections to other eigenfunction techniques might yield hybrid methods that combine algebraic and numerical approaches for broader classes of systems.
Load-bearing premise
Solutions found in the polynomial system obtained from the linear rational ansatz must correspond to actual eigenfunctions that satisfy the original ODE and produce valid closed-form solutions.
What would settle it
A quadratic ODE system whose derived polynomial equations admit a nontrivial solution, yet the resulting linear rational function fails to satisfy the Koopman eigenfunction partial differential equation upon direct substitution.
Figures

read the original abstract
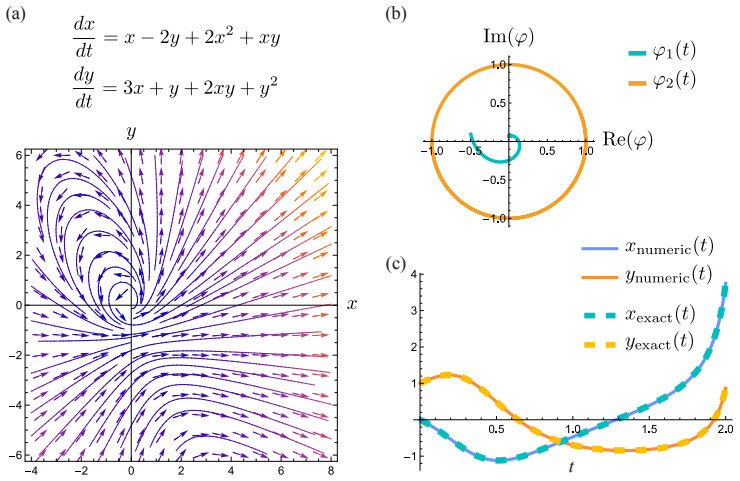
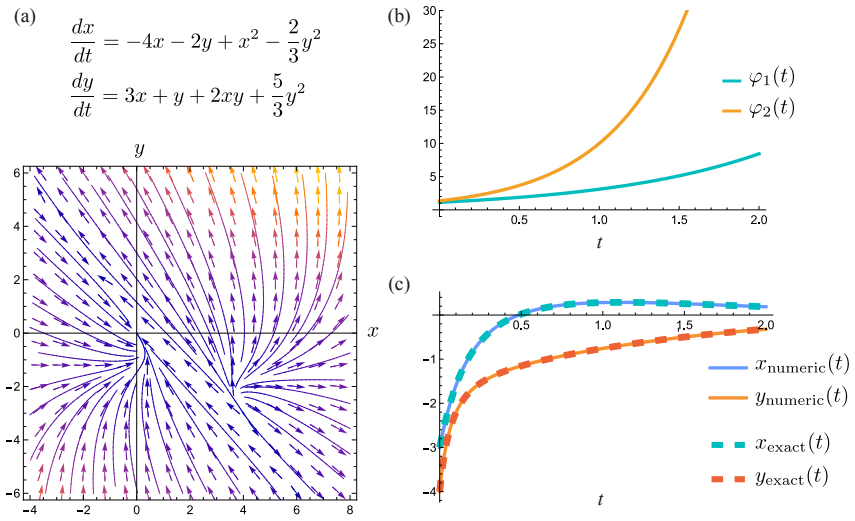
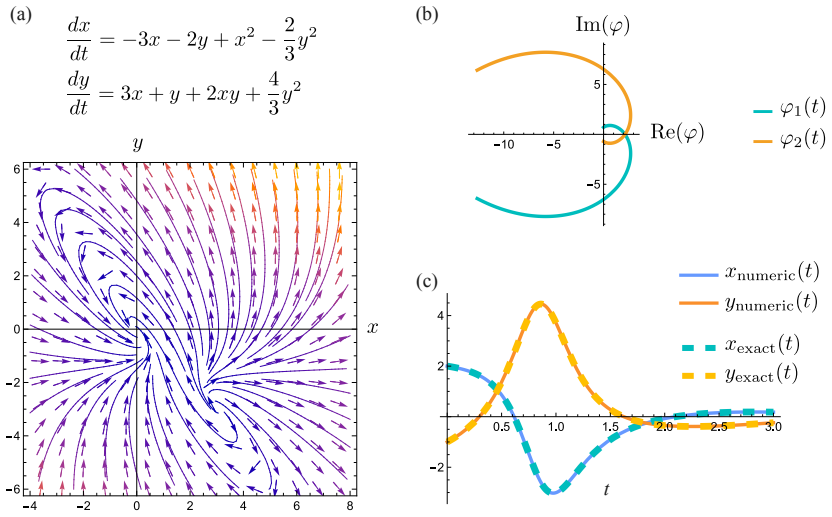
Many important systems across biology, engineering, physics, and economics are characterized by polynomial ordinary differential equations (ODEs), yet analytical solutions are rare. We develop a framework for identifying and solving a broad class of two-dimensional quadratic ODEs using linear rational Koopman eigenfunctions. By imposing a linear rational form on the eigenfunctions, we convert the Koopman eigenfunction PDE into a large algebraic system of polynomials. We then study the solutions of this polynomial system that satisfy the ODE restrictions; we call the solution set the rational eigenfunction variety of an ODE system. The nonlinear algebra method uses formal algebraic geometry theory to analyze and solve systems otherwise intractable and to discover relationships between ODE and eigenfunction parameters that must hold to extract eigenfunctions. We identify families of quadratic ODEs that can be solved analytically, characterize their eigenfunction parameters, and use the resulting eigenfunctions to produce closed-form analytical solutions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a framework for analytically solving families of two-dimensional quadratic ODEs by imposing a linear rational ansatz on Koopman eigenfunctions. This converts the associated eigenfunction PDE into a polynomial algebraic system whose solutions are analyzed via algebraic geometry; the resulting parameter relations define the rational eigenfunction variety, from which closed-form solutions for the original ODEs are constructed.
Significance. If the extracted eigenfunctions are verified to satisfy the ODEs, the method supplies a systematic algebraic route to identifying integrable quadratic systems and their exact solutions, complementing existing techniques in dynamical systems. The use of formal algebraic geometry to extract parameter constraints without numerical fitting is a clear strength, offering reproducible, exact characterizations that could apply to models in biology, engineering, and physics.
major comments (1)
- The central construction relies on the linear rational ansatz producing genuine Koopman eigenfunctions whose level sets yield closed-form solutions. While the algebraic reduction is direct, explicit verification that the variety solutions satisfy the original nonlinear ODE (beyond the cleared-denominator polynomial system) is required to confirm the claim; this should be shown for at least one concrete family in the main text.
minor comments (2)
- The term 'rational eigenfunction variety' is introduced without a precise mathematical definition or reference to the ambient space in which it lives; a short formal definition early in the paper would improve clarity.
- The abstract states that families are identified and solutions produced, but the manuscript would benefit from a table or explicit list of the quadratic ODEs, their eigenfunction parameters, and the resulting closed-form expressions to make the results immediately usable.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our manuscript and the constructive recommendation for minor revision. We address the single major comment below and will incorporate the requested verification in the revised version.
read point-by-point responses
-
Referee: The central construction relies on the linear rational ansatz producing genuine Koopman eigenfunctions whose level sets yield closed-form solutions. While the algebraic reduction is direct, explicit verification that the variety solutions satisfy the original nonlinear ODE (beyond the cleared-denominator polynomial system) is required to confirm the claim; this should be shown for at least one concrete family in the main text.
Authors: We agree that explicit verification is essential to confirm that solutions from the rational eigenfunction variety are not extraneous artifacts introduced by clearing denominators in the eigenfunction PDE. In the revised manuscript we will add a dedicated subsection (or expanded example) that selects one concrete family from the variety, substitutes the resulting linear rational eigenfunctions back into the original Koopman PDE, verifies that the PDE is satisfied identically, and explicitly demonstrates that the level sets of these eigenfunctions yield the closed-form solutions to the quadratic ODE system. revision: yes
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper starts from the Koopman eigenfunction PDE for a given quadratic ODE, imposes an explicit linear rational ansatz on the eigenfunctions, clears denominators to obtain a polynomial algebraic system, and applies external algebraic-geometry techniques to solve for parameter relations that yield valid eigenfunctions. These eigenfunctions are then used to construct closed-form solutions for the ODEs that admit them. The process is purely constructive and algebraic; the reported families and solutions are exactly the outputs of solving the derived polynomial system under the stated ansatz and ODE restrictions. No step reduces a claimed prediction or result to a fitted parameter, self-definition, or load-bearing self-citation; the method characterizes only those ODEs for which the ansatz succeeds, without claiming generality or external validation beyond the algebraic construction itself.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Koopman operator theory applies to the given quadratic ODE systems and yields an eigenfunction PDE
- standard math Solutions of the resulting polynomial system can be found and interpreted using algebraic geometry
invented entities (1)
-
rational eigenfunction variety
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Ergodic theory, dynamic mode decomposition, and computation of spectral properties of the koopman operator.SIAM Journal on Applied Dynamical Systems, 16(4):2096– 2126, January 2017
Hassan Arbabi and Igor Mezić. Ergodic theory, dynamic mode decomposition, and computation of spectral properties of the koopman operator.SIAM Journal on Applied Dynamical Systems, 16(4):2096– 2126, January 2017
2096
-
[2]
Barlow and Steven J
Nathaniel S. Barlow and Steven J. Weinstein.Power Series Solutions to Nonlinear Ordinary Differential Equations and Related Problems of Physics, Engineering, and Life Sciences. Other Titles in Applied Mathematics. Society for Industrial and Applied Mathematics, September 2025
2025
-
[3]
primary eigenfunction,
Erik M. Bollt. Geometric considerations of a good dictionary for Koopman analysis of dynamical sys- tems: Cardinality, “primary eigenfunction,” and efficient representation.Communications in Nonlinear Science and Numerical Simulation, 100:105833, September 2021
2021
-
[4]
Bollt, Qianxiao Li, Felix Dietrich, and Ioannis Kevrekidis
Erik M. Bollt, Qianxiao Li, Felix Dietrich, and Ioannis Kevrekidis. On matching, and even rectifying, dynamical systems through koopman operator eigenfunctions.SIAM Journal on Applied Dynamical Systems, 17(2):1925–1960, January 2018
1925
-
[5]
Springer US, New York, NY, 1978
Martin Braun.Differential Equations and Their Applications. Springer US, New York, NY, 1978
1978
-
[6]
Nonlinear algebra and applications.Numerical Algebra, Control and Optimization, 13(1):81–116, 2023
Paul Breiding, Türkü Özlüm Çelik, Timothy Duff, Alexander Heaton, Aida Maraj, Anna-Laura Sat- telberger, Lorenzo Venturello, and Oğuzhan Yürük. Nonlinear algebra and applications.Numerical Algebra, Control and Optimization, 13(1):81–116, 2023. 22
2023
-
[7]
Brunton, Bingni W
Steven L. Brunton, Bingni W. Brunton, Joshua L. Proctor, and J. Nathan Kutz. Koopman invariant subspaces and finite linear representations of nonlinear dynamical systems for control.PLoS ONE, 11(2):1–19, February 2016
2016
-
[8]
Brunton, Marko Budišić, Eurika Kaiser, and J
Steven L. Brunton, Marko Budišić, Eurika Kaiser, and J. Nathan Kutz. Modern Koopman Theory for Dynamical Systems, October 2021
2021
-
[9]
Brunton and J
Steven L. Brunton and J. Nathan Kutz.Data-Driven Science and Engineering: Machine Learning, Dynamical Systems. Cambridge University Press, New York, NY, 2019
2019
-
[10]
Applied Koopmanism.Chaos: An Interdisciplinary Journal of Nonlinear Science, 22(4):047510, December 2012
Marko Budišić, Ryan Mohr, and Igor Mezić. Applied Koopmanism.Chaos: An Interdisciplinary Journal of Nonlinear Science, 22(4):047510, December 2012
2012
-
[11]
Camacho and Carlos Bordons Alba.Model Predictive Control
Eduardo F. Camacho and Carlos Bordons Alba.Model Predictive Control. Advanced Textbooks in Control and Signal Processing. Springer-Verlag, London, 2 edition, 2007
2007
-
[12]
David A. Cox, John Little, and Donal O’Shea.Ideals, Varieties, and Algorithms: An Introduction to Computational Algebraic Geometry and Commutative Algebra, 3/e (Undergraduate Texts in Mathemat- ics). Springer-Verlag, Berlin, Heidelberg, 2007
2007
-
[13]
Rolf Findeisen, Lars Imsland, Frank Allgower, and Bjarne A. Foss. State and output feedback nonlinear model predictive control: An overview.European Journal of Control, 9(2-3):190–206, January 2003
2003
-
[14]
Grayson and Michael E
Daniel R. Grayson and Michael E. Stillman. Macaulay2, a software system for research in algebraic geometry. Available athttp://www2.macaulay2.com
-
[15]
Learning Koopman Eigenfunctions and Invariant Subspaces From Data: Symmetric Subspace Decomposition.IEEE Transactions on Automatic Control, 67(7):3442–3457, July 2022
Masih Haseli and Jorge Cortés. Learning Koopman Eigenfunctions and Invariant Subspaces From Data: Symmetric Subspace Decomposition.IEEE Transactions on Automatic Control, 67(7):3442–3457, July 2022
2022
-
[16]
IFAC Symposia Series; 1990, No
Alberto Isidori.Nonlinear Control Systems Design: Selected Papers from the IFAC Symposium, Capri, Italy, 14-16 June 1989. IFAC Symposia Series; 1990, No. 2. Published for the International Federation of Automatic Control by Pergamon Press, Oxford; New York, 1st ed. edition, 1990
1989
-
[17]
Data-driven discovery of Koopman eigenfunctions for control.Machine Learning: Science and Technology, 2(3):035023, September 2021
Eurika Kaiser, J Nathan Kutz, and Steven L Brunton. Data-driven discovery of Koopman eigenfunctions for control.Machine Learning: Science and Technology, 2(3):035023, September 2021
2021
-
[18]
Globalizing manifold-based reduced models for equations and data
Bálint Kaszás and George Haller. Globalizing manifold-based reduced models for equations and data. Nature Communications, 16(1):5722, July 2025
2025
-
[19]
R. B. Klein, B. Sanderse, P. Costa, R. Pecnik, and R. A. W. M. Henkes. Entropy-stable model reduction of one-dimensional hyperbolic systems using rational quadratic manifolds.Journal of Computational Physics, 528:113817, May 2025
2025
-
[20]
B. O. Koopman. Hamiltonian systems and transformation in Hilbert space.Proceedings of the National Academy of Sciences of the United States of America, 17(5):315–318, May 1931
1931
-
[21]
B. O. Koopman and J. v. Neumann. Dynamical systems of continuous spectra.Proceedings of the National Academy of Sciences of the United States of America, 18(3):255–263, March 1932
1932
-
[22]
Optimal construction of Koopman eigenfunctions for prediction and control.IEEE Transactions on Automatic Control, 65(12):5114–5129, December 2020
Milan Korda and Igor Mezić. Optimal construction of Koopman eigenfunctions for prediction and control.IEEE Transactions on Automatic Control, 65(12):5114–5129, December 2020
2020
-
[23]
Nathan Kutz.Data-Driven Modeling and Scientific Computation: Methods for Complex Systems and Big Data
J. Nathan Kutz.Data-Driven Modeling and Scientific Computation: Methods for Complex Systems and Big Data. Oxford University Press, Incorporated, Oxford, UNITED KINGDOM, 2013
2013
-
[24]
Nathan Kutz, Steven L
J. Nathan Kutz, Steven L. Brunton, Bingni W. Brunton, and Joshua L. Proctor.Dynamic Mode Decomposition. Other Titles in Applied Mathematics. Society for Industrial and Applied Mathematics, November 2016. 23
2016
-
[25]
Kvalheim and Shai Revzen
Matthew D. Kvalheim and Shai Revzen. Existence and uniqueness of global Koopman eigenfunctions for stable fixed points and periodic orbits.Physica D: Nonlinear Phenomena, 425:132959, November 2021
2021
-
[26]
Bollt, and Ioannis G
Qianxiao Li, Felix Dietrich, Erik M. Bollt, and Ioannis G. Kevrekidis. Extended dynamic mode de- composition with dictionary learning: A data-driven adaptive spectral decomposition of the Koopman operator.Chaos: An Interdisciplinary Journal of Nonlinear Science, 27(10):103111, October 2017
2017
-
[27]
Global stability analysis using the eigenfunctions of the Koopman operator.IEEE Transactions on Automatic Control, 61(11):3356–3369, November 2016
Alexandre Mauroy and Igor Mezić. Global stability analysis using the eigenfunctions of the Koopman operator.IEEE Transactions on Automatic Control, 61(11):3356–3369, November 2016
2016
-
[28]
Spectral properties of dynamical systems, model reduction and decompositions.Nonlinear Dynamics, 41(1):309–325, August 2005
Igor Mezić. Spectral properties of dynamical systems, model reduction and decompositions.Nonlinear Dynamics, 41(1):309–325, August 2005
2005
-
[29]
American Mathematical Society, Providence, Rhode Island, 2021
Mateusz Michałek and Bernd Sturmfels.Invitation to Nonlinear Algebra, volume 211 ofGraduate Studies in Mathematics. American Mathematical Society, Providence, Rhode Island, 2021
2021
-
[30]
Nathan Kutz
Megan Morrison and J. Nathan Kutz. Nonlinear control of networked dynamical systems.IEEE Trans- actions on Network Science and Engineering, 8(1):174–189, January 2021
2021
-
[31]
Nathan Kutz
Megan Morrison and J. Nathan Kutz. Solving nonlinear ordinary differential equations using the invari- ant manifolds and Koopman eigenfunctions.SIAM Journal on Applied Dynamical Systems, 23(1):924– 960, March 2024
2024
-
[32]
Kerswell
Jacob Page and Rich R. Kerswell. Koopman mode expansions between simple invariant solutions. Journal of Fluid Mechanics, 879:1–27, November 2019
2019
-
[33]
L. Piegl. On NURBS: A survey.IEEE Computer Graphics and Applications, 11(1):55–71, January 1991
1991
-
[34]
Piegl and Wayne Tiller.The NURBS Book
Les A. Piegl and Wayne Tiller.The NURBS Book. Berlin ; New York : Springer, 1997
1997
-
[35]
W.A. Porter. An overview of polynomic system theory.Proceedings of the IEEE, 64(1):18–23, January 1976
1976
-
[36]
A Chapman & Hall Book
Steven Strogatz.Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering. A Chapman & Hall Book. CRC Press, Boca Raton London New York, second edition, first issued in hardback edition, 2019
2019
-
[37]
SIAM, 2002
Mathukumalli Vidyasagar.Nonlinear Systems Analysis: Second Edition, volume 42. SIAM, 2002
2002
-
[38]
Williams, Ioannis G
Matthew O. Williams, Ioannis G. Kevrekidis, and Clarence W. Rowley. A Data–Driven Approximation of the Koopman Operator: Extending Dynamic Mode Decomposition.Journal of Nonlinear Science, 25(6):1307–1346, December 2015
2015
-
[39]
Williams, Clarence W
Matthew O. Williams, Clarence W. Rowley, and Ioannis G. Kevrekidis. A kernel-based method for data-driven koopman spectral analysis.Journal of Computational Dynamics, 2(2):247–265, 2015. 24
2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.