Recognition: 2 theorem links
· Lean TheoremTouring a Sequence of Orthogonal Polygons
Pith reviewed 2026-05-14 22:02 UTC · model grok-4.3
The pith
A truly subquadratic algorithm computes shortest tours visiting sequences of disjoint orthogonal polygons.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In the orthogonal setting with Manhattan distance the shortest tour visiting points p_i in each polygon P_i of a sequence can be found in Õ(n^{2-1/48}) time whenever consecutive polygons are disjoint. The same setting yields Õ(n) time for ortho-convex polygons and O(n) time for rectangles. General intersecting instances are solved in Õ(n²) time or Õ(n^{1.5}k²) time.
What carries the argument
Additively weighted Voronoi diagrams combined with rectangle decompositions, persistent data structures, and dynamic distance oracles on weighted planar graphs.
If this is right
- Routing or inspection paths through separated rectangular regions become practical for large n under the disjointness condition.
- Linear-time solutions exist for touring sequences of axis-aligned rectangles or ortho-convex shapes.
- General sequences without disjointness still require near-quadratic time but improve when k is small.
- The ordering constraint is handled by combining static geometric diagrams with dynamic shortest-path oracles.
Where Pith is reading between the lines
- The same geometric toolkit might yield subquadratic results for other distance measures once orthogonality is relaxed.
- Grid-based path planning in manufacturing or VLSI routing could adopt the disjoint-case algorithm directly.
- Further exponent improvements would follow from tighter analysis of the persistent structures or Voronoi diagram construction.
Load-bearing premise
Consecutive polygons are disjoint or the polygons belong to the restricted classes of ortho-convex shapes or axis-aligned rectangles.
What would settle it
A concrete sequence of n vertices forming disjoint consecutive orthogonal polygons whose shortest tour length differs from the length returned by the algorithm, or whose running time exceeds the stated bound.
Figures










read the original abstract
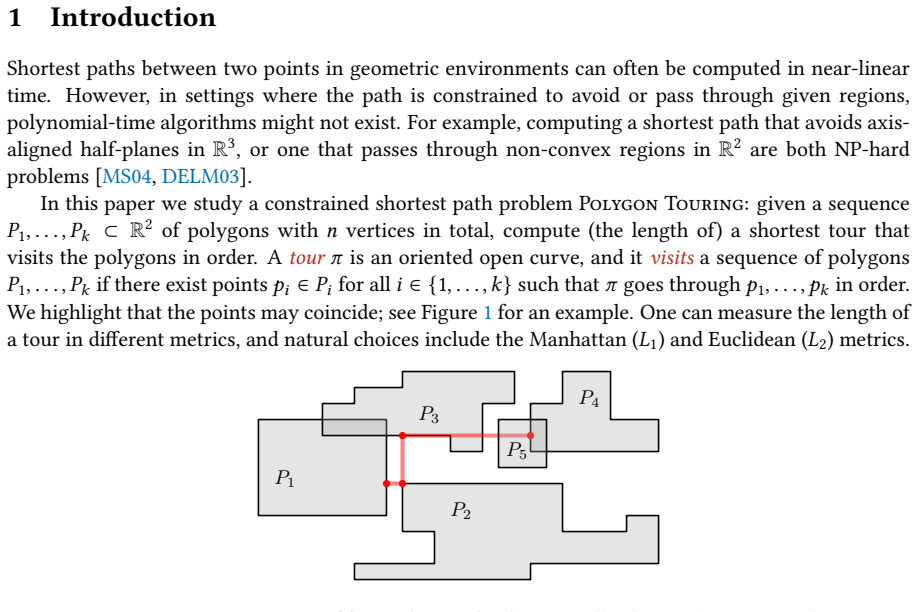
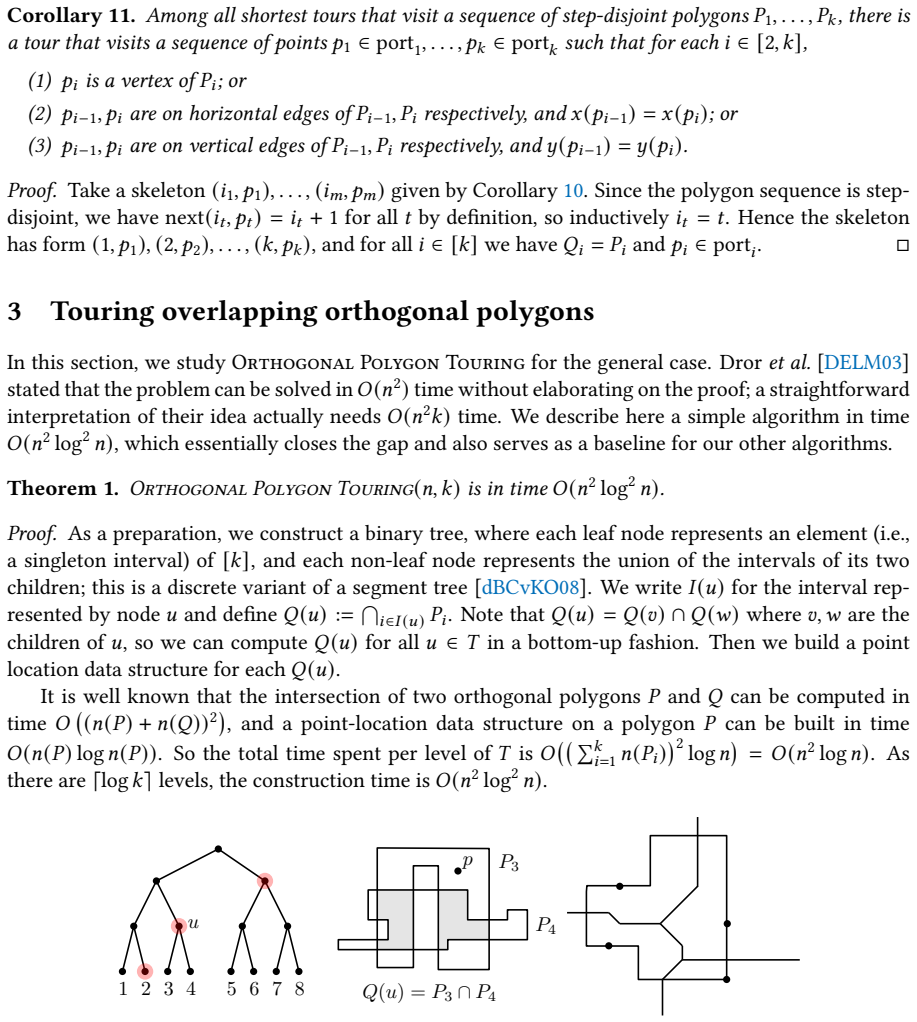
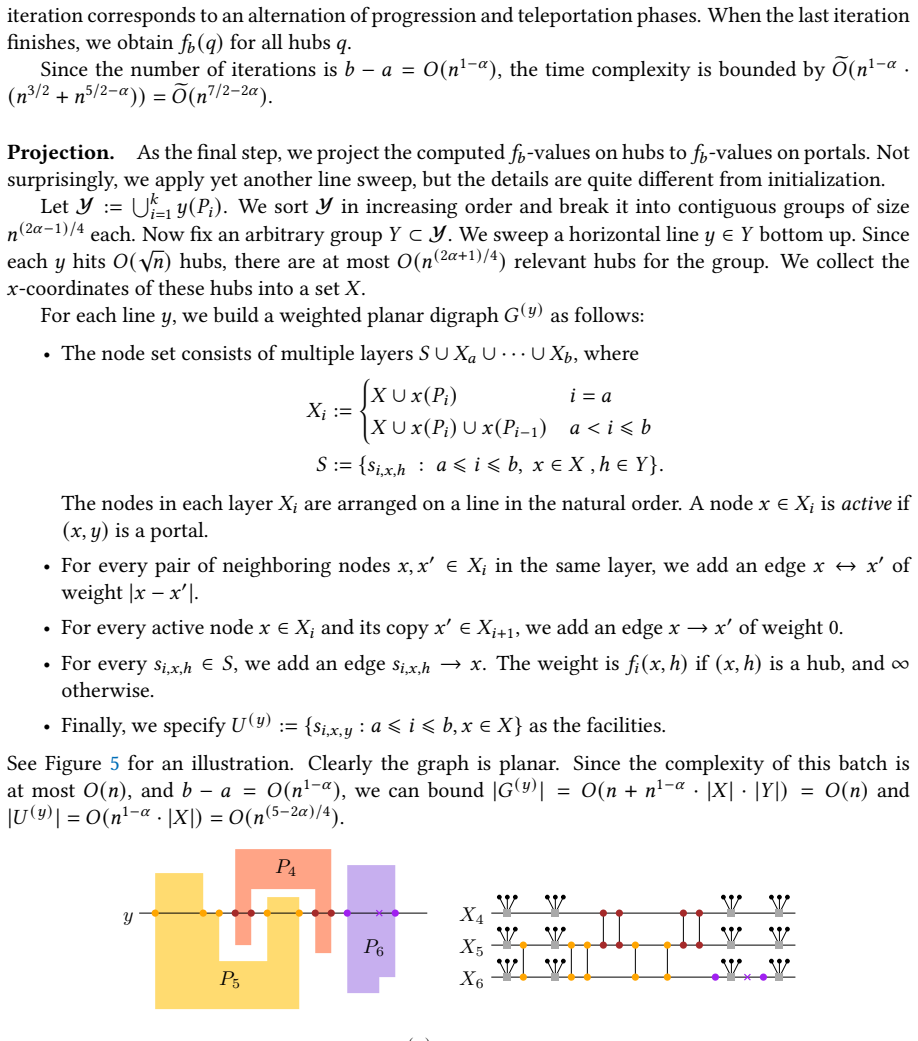
We study the problem of computing a shortest tour that visits a sequence of $k$ polygons $P_1,\dots, P_k$ with a total number of $n$ vertices. A tour is an oriented curve such that there exist points $p_i\in P_i$ for all $i$ where $p_i$ appears not after $p_{i+1}$. In a seminal paper, Dror, Efrat, Lubiw and Mitchell (STOC 2003) considered the problem under $L_2$ distance, and gave $\widetilde O(nk)$ and $\widetilde O(nk^2)$ algorithms for disjoint and intersecting convex polygons, respectively. In this paper, we consider the orthogonal setting (with orthogonal polygons and Manhattan distance) and obtain the following results: - a truly subquadratic $\widetilde O(n^{2-\frac{1}{48}})$ algorithm when consecutive polygons in the sequence are disjoint; - an $\widetilde O(n)$ algorithm for ortho-convex polygons when consecutive polygons are disjoint; - an $O(n)$ algorithm for axis-aligned rectangles; - $\widetilde O(n^2)$ and $\widetilde O(n^{1.5}k^2)$ algorithms without restrictions. Our algorithms build on a wide range of techniques, including additively weighted Voronoi diagrams, rectangle decompositions, persistent data structures, and dynamic distance oracles for weighted planar graphs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies the shortest tour visiting a sequence of k orthogonal polygons (total n vertices) under Manhattan distance, where a tour is an oriented curve hitting each polygon in order. It claims a truly subquadratic Õ(n^{2-1/48}) algorithm when consecutive polygons are disjoint, an Õ(n) algorithm for disjoint ortho-convex polygons, an O(n) algorithm for axis-aligned rectangles, and Õ(n²) / Õ(n^{1.5}k²) algorithms in the unrestricted case. The results rely on additively weighted Voronoi diagrams, rectangle decompositions, persistent data structures, and dynamic distance oracles for weighted planar graphs, extending the Dror et al. (STOC 2003) framework to the orthogonal setting.
Significance. If the claimed bounds hold, the subquadratic result for disjoint consecutive polygons is a meaningful advance over the Õ(nk) bound for disjoint convex polygons in the Euclidean setting, as the exponent 2-1/48 is independent of k and exploits disjointness via dynamic oracles and decompositions. The linear-time special cases for ortho-convex polygons and rectangles are strong if they avoid hidden factors and align with the general technique. The work ships concrete complexity improvements and reproducible algorithmic structure (Voronoi + persistent structures) that could be verified or extended.
minor comments (3)
- Abstract: the phrase 'truly subquadratic' is used for the Õ(n^{2-1/48}) bound; clarify whether the Õ notation hides polylog factors that could affect the 'truly' qualifier relative to the prior Õ(nk) result.
- The manuscript should include a brief table or paragraph comparing the new bounds to Dror et al. (STOC 2003) and any intermediate orthogonal results, citing the exact prior exponents.
- Section on rectangle decompositions: the reduction from ortho-convex to rectangles is stated as linear-time; confirm that the constant factors and any auxiliary structures remain linear under the disjointness assumption.
Simulated Author's Rebuttal
We thank the referee for their positive assessment and recommendation of minor revision. The referee's summary correctly reflects our main results: the Õ(n^{2-1/48}) algorithm for disjoint consecutive orthogonal polygons, the linear-time algorithms for ortho-convex polygons and rectangles, and the unrestricted bounds. We appreciate the recognition that the exponent is independent of k and that the techniques extend the Dror et al. framework. No specific major comments were listed in the report, so we have no point-by-point revisions to address at this stage. We are happy to incorporate any minor clarifications the editor may request.
Circularity Check
No significant circularity detected in derivation chain
full rationale
The paper derives new algorithmic results for shortest tours visiting sequences of orthogonal polygons under Manhattan distance, achieving subquadratic time for disjoint consecutive polygons via combinations of additively weighted Voronoi diagrams, rectangle decompositions, persistent data structures, and dynamic distance oracles. These build on external prior literature (e.g., Dror et al. STOC 2003) without self-definitional reductions, fitted inputs renamed as predictions, or load-bearing self-citations. The exponent 2-1/48 arises from recurrence analysis under the stated disjointness assumption, which is an independent combinatorial condition rather than a tautology. Special cases (ortho-convex, rectangles) use linear-time reductions aligned with the general method but not circularly dependent on the main bound. The derivation chain is self-contained against external benchmarks with no equations or steps reducing by construction to the inputs.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearOur algorithms build on ... additively weighted Voronoi diagrams, rectangle decompositions, persistent data structures, and dynamic distance oracles for weighted planar graphs.
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclearLemma 13 ... partition R^2 into n+1 rectangles ... every vertical/horizontal line intersects at most O(√n) rectangles.
Reference graph
Works this paper leans on
-
[1]
[AdBKS25] Antonios Antoniadis, Mark de Berg, Sándor Kisfaludi-Bak, and Antonis Skarlatos. Com- puting smallest convex intersecting polygons.Journal of Computational Geometry, 16(1):167–202, 2025.doi:10.20382/jocg.v16i1a6. [AGTG21] Charles Joseph Argue, Anupam Gupta, Ziye Tang, and Guru Guruganesh. Chasing con- vex bodies with linear competitive ratio.Jour...
-
[2]
24 [BBE+20] Nikhil Bansal, Martin Böhm, Marek Eliáš, Grigorios Koumoutsos, and Seeun William Umboh
doi:10.1145/3450349. 24 [BBE+20] Nikhil Bansal, Martin Böhm, Marek Eliáš, Grigorios Koumoutsos, and Seeun William Umboh. Nested convex bodies are chaseable.Algorithmica, 82(6):1640–1653, 2020.doi: 10.1007/s00453-019-00661-x. [BCI+19] Luis Barba, Jean Cardinal, John Iacono, Stefan Langerman, Aurélien Ooms, and Noam Solomon. Subquadratic algorithms for alge...
-
[3]
[BKK+22] Karl Bringmann, Sándor Kisfaludi-Bak, Marvin Künnemann, André Nusser, and Zahra Parsaeian
doi:10.1109/FOCS.2015.15. [BKK+22] Karl Bringmann, Sándor Kisfaludi-Bak, Marvin Künnemann, André Nusser, and Zahra Parsaeian. Towards sub-quadratic diameter computation in geometric intersection graphs. In38th International Symposium on Computational Geometry (SoCG 2022), volume 224 ofLeibniz International Proceedings in Informatics (LIPIcs), pages 21:1–2...
-
[4]
[BKK+23] Karl Bringmann, Sándor Kisfaludi-Bak, Marvin Künnemann, Dániel Marx, and André Nusser. Dynamic time warping under translation: Approximation guided by space-filling curves.Journal of Computational Geometry, 14(2):83–107, 2023.doi:10.20382/jocg. v14i2a6. [BLLS23] Sébastien Bubeck, Yin Tat Lee, Yuanzhi Li, and Mark Sellke. Competitively chasing con...
-
[5]
[BN22] Karl Bringmann and André Nusser
doi:10.1137/20M1312332. [BN22] Karl Bringmann and André Nusser. Translating Hausdorff is hard: Fine-grained lower bounds for Hausdorff distance under translation.Journal of Computational Geometry, 13(2):30–50, 2022.doi:10.20382/jocg.v13i2a3. [Bri14] Karl Bringmann. Why walking the dog takes time: Fréchet distance has no strongly subquadratic algorithms un...
-
[6]
doi:10.1109/FOCS.2014.76. [Bri19] Karl Bringmann. Fine-grained complexity theory (tutorial). In Rolf Niedermeier and Christophe Paul, editors,36th International Symposium on Theoretical Aspects of Com- puter Science (STACS 2019), volume 126 ofLIPIcs, pages 4:1–4:7. Schloss Dagstuhl - Leibniz-Zentrum für Informatik, 2019.doi:10.4230/LIPICS.STACS.2019.4. [B...
-
[7]
arXiv:2510.16346. 25 [CHY23] Timothy M. Chan, Qizheng He, and Yuancheng Yu. On the fine-grained complexity of small-size geometric set cover and discrete𝑘-center for small𝑘. In50th International Colloquium on Automata, Languages, and Programming (ICALP 2023), volume 261 ofLeib- niz International Proceedings in Informatics (LIPIcs), pages 34:1–34:19. Schlo...
-
[8]
[dBCvKO08] Mark de Berg, Otfried Cheong, Marc J. van Kreveld, and Mark H. Overmars.Com- putational Geometry: Algorithms and Applications. Springer, 3rd edition, 2008.doi: 10.1007/978-3-540-77974-2. [dBvK94] Mark de Berg and Marc van Kreveld. Rectilinear decompositions with low stabbing number.Information processing letters, 52(4):215–221,
-
[9]
[DELM03] Moshe Dror, Alon Efrat, Anna Lubiw, and Joseph S. B. Mitchell. Touring a sequence of polygons. InProceedings of the Thirty-Fifth Annual ACM Symposium on Theory of Computing (STOC 2003), STOC ’03, page 473–482, 2003.doi:10.1145/780542.780612. [DKP+15] José Miguel Díaz-Báñez, Matias Korman, Pablo Pérez-Lantero, Alexander Pilz, Carlos Seara, and Rod...
-
[10]
[FL93] Joel Friedman and Nathan Linial
URL:https://www.sciencedirect.com/science/article/pii/ 0022000089900342,doi:10.1016/0022-0000(89)90034-2. [FL93] Joel Friedman and Nathan Linial. On convex body chasing.Discrete & Computational Geometry, 9(3):293–321, 1993.doi:10.1007/BF02189324. [FVP11] Jan Faigl, Vojtěch Vonásek, and Libor Přeučil. A multi-goal path planning for goal re- gions in the po...
-
[11]
[FVP13] Jan Faigl, Vojtěch Vonásek, and Libor Přeučil
URL:https://comrob.fel.cvut.cz/ papers/ecmr11mtp.pdf. [FVP13] Jan Faigl, Vojtěch Vonásek, and Libor Přeučil. Visiting convex regions in a polygo- nal map.Robotics and Autonomous Systems, 61(10):1070–1083, 2013.doi:10.1016/ j.robot.2012.08.013. [GO95] Anka Gajentaan and Mark H. Overmars. On a class of𝑂(𝑛 2)problems in computational geometry.Computational G...
-
[12]
[Kle89] Rolf Klein.Concrete and abstract Voronoi diagrams
doi:10.1109/ECMR.2019.8870971. [Kle89] Rolf Klein.Concrete and abstract Voronoi diagrams. Springer,
-
[13]
On the Travelling Salesman Problem with Neighborhoods in a Polygonal World
[KVM23] Miroslav Kulich, Jan Vidašič, and Jan Mikula. On the Travelling Salesman Problem with Neighborhoods in a Polygonal World. In José M. Cascalho, Mohammad Osman Tokhi, Manuel F. Silva, Armando Mendes, Khaled Goher, and Matthias Funk, editors,Robotics in Natural Settings, volume 530 ofLecture Notes in Networks and Systems, pages 334–345. Springer, Cha...
-
[14]
SIAM, 2013.doi:10.1137/1.9781611973105.60. [MS04] Joseph S. B. Mitchell and Micha Sharir. New results on shortest paths in three dimensions. InProceedings of the Twentieth Annual ACM Symposium on Computational Geometry, SCG ’04, pages 124–133, New York, NY, USA,
-
[15]
Association for Computing Machinery. doi:10.1145/997817.997839. [NP24] Bengt J. Nilsson and Eli Packer. Approximation algorithms for the two-watchman route in a simple polygon.Algorithmica, 86(9):2845–2884, 2024.doi:10.1007/ s00453-024-01245-0. [PV24] Justo Puerto and Carlos Valverde. The hampered travelling salesman problem with neighbourhoods.Computers ...
-
[16]
Associ- ation for Computing Machinery.doi:10.1145/1998196.1998243. 27 A Rectangle partition with low stabbing number Proof of Lemma 13.Let𝑉be the set of vertices of𝑃 1, . . . , 𝑃𝑘. We build a quadtree on𝑉as follows. Let 𝐵be the bounding box of𝑉. We split𝐵into two rectangles𝐵 0, 𝐵1 by a vertical line at the median 𝑥-coordinate in𝑉. Then we split each𝐵 𝑖 in...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.