Recognition: no theorem link
Value-Decomposed Reinforcement Learning Framework for Taxiway Routing with Hierarchical Conflict-Aware Observations
Pith reviewed 2026-05-13 07:09 UTC · model grok-4.3
The pith
A value-decomposed reinforcement learning framework uses hierarchical conflict observations to improve safety-efficiency trade-offs in multi-aircraft taxiway routing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
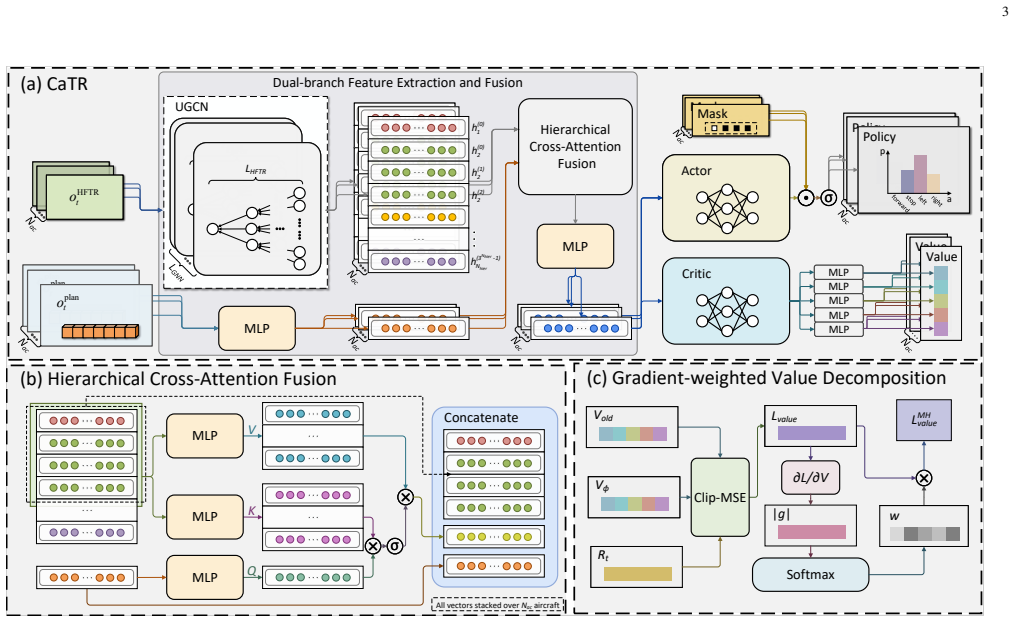
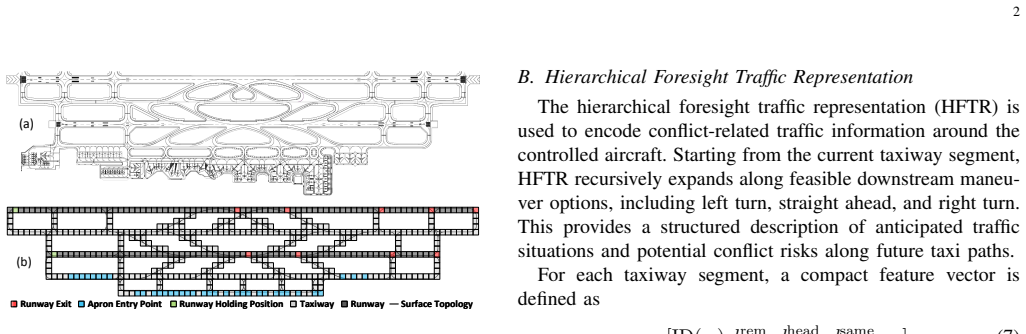
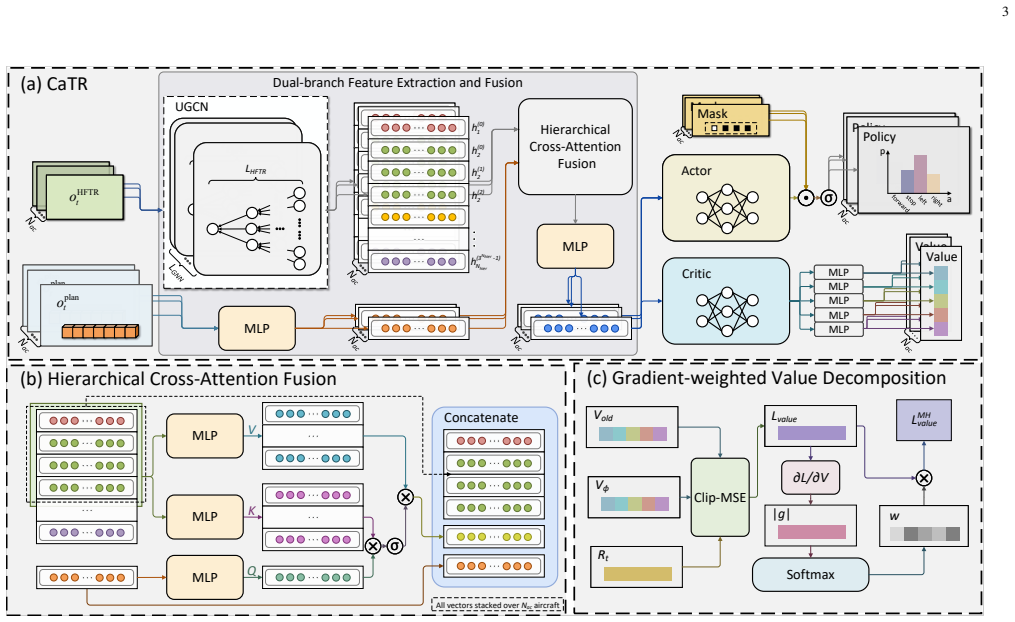
CaTR constructs a grid-based airport surface environment with action masking, introduces a hierarchical foresight traffic representation to encode current and downstream conflict-related traffic conditions, and adopts a value-decomposed reinforcement learning strategy to prioritize sparse but safety-critical objectives, achieving better safety-efficiency trade-offs than planning, optimization, and reinforcement learning baselines while maintaining practical runtime on a realistic Changsha Huanghua International Airport model.
What carries the argument
Value-decomposed reinforcement learning combined with a hierarchical foresight traffic representation inside a grid-based environment that uses action masking.
Load-bearing premise
The grid-based simulation and the particular way rewards are decomposed in the value function accurately reflect real airport conflict dynamics and operational priorities without large bias from the model.
What would settle it
Running CaTR decisions against recorded controller actions and actual aircraft trajectories from live operations at Changsha Huanghua or a comparable airport and checking whether the reported safety-efficiency gains disappear.
Figures
read the original abstract
Taxiway routing and on-surface conflict avoidance are coupled safety-critical decision problems in airport surface operations. Existing planning and optimization methods are often limited by online computational cost, while reinforcement learning methods may struggle to represent downstream traffic conflicts and balance multiple objectives. This paper presents Conflict-aware Taxiway Routing (CaTR), a reinforcement learning framework for real-time multi-aircraft taxiway routing. CaTR constructs a grid-based airport surface environment with action masking, introduces a hierarchical foresight traffic representation to encode current and downstream conflict-related traffic conditions, and adopts a value-decomposed reinforcement learning strategy to prioritize sparse but safety-critical objectives. Experiments are conducted on a realistic environment based on Changsha Huanghua International Airport under multiple traffic density levels. Results show that CaTR achieves better safety--efficiency trade-offs than representative planning, optimization, and reinforcement learning baselines while maintaining practical runtime.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Conflict-aware Taxiway Routing (CaTR), a value-decomposed reinforcement learning framework for real-time multi-aircraft taxiway routing. It models the airport surface as a grid-based environment with action masking, introduces a hierarchical foresight representation to encode current and downstream traffic conflicts, and uses value decomposition to prioritize sparse safety-critical rewards. Experiments on a realistic model of Changsha Huanghua International Airport under varying traffic densities report that CaTR yields improved safety-efficiency trade-offs relative to planning, optimization, and RL baselines while remaining computationally practical.
Significance. If the quantitative results hold under scrutiny, the work offers a practical RL-based alternative for coupled routing and conflict resolution in airport surface operations, addressing limitations of online optimization and standard RL in representing downstream interactions. The hierarchical observation and value-decomposition components are domain-appropriate adaptations that could generalize to other safety-critical multi-agent routing problems.
major comments (2)
- [Experiments] Experiments section: the central claim of superior safety-efficiency trade-offs is stated without accompanying quantitative metrics, confidence intervals, statistical significance tests, or ablation results in the provided summary. This leaves the magnitude of improvement and attribution to the hierarchical representation versus value decomposition unverifiable.
- [Method and Experiments] Method and Experiments sections: the grid discretization together with action masking for conflict enforcement may alter relative ordering of conflict resolutions and efficiency metrics compared with continuous kinematics (variable speeds, exact separation distances). No sensitivity analysis to grid resolution or comparison against a continuous-dynamics baseline is described, which is load-bearing for attributing performance gains to the proposed hierarchical foresight and value decomposition rather than simulation artifacts.
minor comments (2)
- [Abstract] Abstract: including one or two key quantitative results (e.g., safety violation rate reduction and runtime) would strengthen the summary of contributions.
- [Method] Notation: the precise definition of the hierarchical foresight encoding and the reward decomposition weights should be stated explicitly with equations to allow reproduction.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and have made revisions to strengthen the experimental reporting and analysis of modeling choices.
read point-by-point responses
-
Referee: [Experiments] Experiments section: the central claim of superior safety-efficiency trade-offs is stated without accompanying quantitative metrics, confidence intervals, statistical significance tests, or ablation results in the provided summary. This leaves the magnitude of improvement and attribution to the hierarchical representation versus value decomposition unverifiable.
Authors: We agree that explicit quantitative support is necessary for verifiability. Although the original manuscript reports comparative results, we have revised the Experiments section to include specific metrics (mean taxi time, conflict rate, and efficiency score) with standard deviations and 95% confidence intervals computed over 10 independent random seeds. We added paired t-tests with p-values against all baselines and new ablation tables that isolate the hierarchical foresight representation from the value-decomposition component, showing their individual contributions to the observed safety-efficiency trade-offs. revision: yes
-
Referee: [Method and Experiments] Method and Experiments sections: the grid discretization together with action masking for conflict enforcement may alter relative ordering of conflict resolutions and efficiency metrics compared with continuous kinematics (variable speeds, exact separation distances). No sensitivity analysis to grid resolution or comparison against a continuous-dynamics baseline is described, which is load-bearing for attributing performance gains to the proposed hierarchical foresight and value decomposition rather than simulation artifacts.
Authors: We acknowledge that the discrete grid and action-masking formulation is an approximation. In the revised manuscript we have added a sensitivity study across three grid resolutions (10 m, 20 m, and 50 m cells) that demonstrates consistent ranking of CaTR over baselines. A full continuous-kinematics multi-agent baseline was not feasible within the real-time operational constraints that motivate the work; we have therefore added an explicit discussion of this modeling choice, noting that action masking enforces hard separation constraints analogous to minimum distances while preserving computational tractability. We argue that the performance gains are attributable to the proposed components, as confirmed by the new ablations, rather than discretization artifacts. revision: partial
Circularity Check
No significant circularity; framework uses standard RL components with domain-specific constructions
full rationale
The paper introduces CaTR as a combination of grid-based environment with action masking, hierarchical foresight traffic representation, and value-decomposed RL strategy. These are presented as methodological choices and constructions rather than derived predictions. Performance results are empirical comparisons on a simulator of Changsha Huanghua airport, not reductions of outputs to fitted inputs or self-referential equations by construction. No load-bearing self-citations, uniqueness theorems from prior author work, or ansatzes smuggled via citation are evident in the provided text. The derivation chain remains self-contained with independent content from standard RL techniques adapted to the taxiway domain.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The grid-based model and hierarchical foresight representation accurately encode downstream traffic conflicts
- domain assumption Value decomposition can be applied to prioritize sparse safety objectives without distorting the overall policy
Reference graph
Works this paper leans on
-
[1]
Air Passenger Demand Forecasting: The Future of Global Air Travel , howpublished =. 2023 , url =
work page 2023
-
[2]
Global Fleet and MRO Forecast 2025--2035 , year =
work page 2025
-
[3]
IEEE Transactions on Intelligent Transportation Systems , volume=
Optimization of taxiway routing and runway scheduling , author=. IEEE Transactions on Intelligent Transportation Systems , volume=. 2011 , publisher=
work page 2011
-
[4]
Transportation Research Part C: Emerging Technologies , volume=
A two-stage taxi scheduling strategy at airports with multiple independent runways , author=. Transportation Research Part C: Emerging Technologies , volume=. 2018 , publisher=
work page 2018
-
[5]
IET Intelligent Transport Systems , volume=
Stochastic scheduling of ground movement problem integrated with taxiway routing and gate/stand allocation , author=. IET Intelligent Transport Systems , volume=. 2022 , publisher=
work page 2022
-
[6]
Transportation Research Part C: Emerging Technologies , volume=
A chance-constrained programming model for airport ground movement optimisation with taxi time uncertainties , author=. Transportation Research Part C: Emerging Technologies , volume=. 2021 , publisher=
work page 2021
-
[7]
Transportation Research Part C: Emerging Technologies , volume=
Quick taxi route assignment via real-time intersection state prediction with a spatial-temporal graph neural network , author=. Transportation Research Part C: Emerging Technologies , volume=. 2024 , publisher=
work page 2024
-
[8]
Information Sciences , volume=
Multi-strategy particle swarm and ant colony hybrid optimization for airport taxiway planning problem , author=. Information Sciences , volume=. 2022 , publisher=
work page 2022
-
[9]
Engineering Applications of Artificial Intelligence , volume=
Parameter adaptation-based ant colony optimization with dynamic hybrid mechanism , author=. Engineering Applications of Artificial Intelligence , volume=. 2022 , publisher=
work page 2022
-
[10]
A holistic approach for optimal pre-planning of multi-path standardized taxiing routes , author=. Aerospace , volume=. 2021 , publisher=
work page 2021
-
[11]
Mastering the game of Go with deep neural networks and tree search , author=. nature , volume=. 2016 , publisher=
work page 2016
-
[12]
Application of improved Q-learning algorithm in dynamic path planning for aircraft at airports , author=. IEEE Access , volume=. 2023 , publisher=
work page 2023
-
[13]
Single and Multi-Agent Reinforcement Learning Approach to Optimize Aircraft Ground Trajectories at Airports , author=. 2023 , publisher=
work page 2023
-
[14]
IEEE Transactions on Intelligent Transportation Systems , volume=
A deep reinforcement learning approach for airport departure metering under spatial--temporal airside interactions , author=. IEEE Transactions on Intelligent Transportation Systems , volume=. 2022 , publisher=
work page 2022
-
[15]
AIAA AVIATION FORUM AND ASCEND 2024 , pages=
Optimizing Airport Ground Movements Using Multi-Agents Reinforcement Learning , author=. AIAA AVIATION FORUM AND ASCEND 2024 , pages=
work page 2024
-
[16]
Transportation Research Part C: Emerging Technologies , volume=
The feasibility of Follow-the-Greens for 4-dimensional trajectory based airport ground movements , author=. Transportation Research Part C: Emerging Technologies , volume=. 2020 , publisher=
work page 2020
-
[17]
Transactions of the Japan Society for Aeronautical and Space Sciences , volume=
Towards greener airport surface operations: a reinforcement learning approach for autonomous taxiing , author=. Transactions of the Japan Society for Aeronautical and Space Sciences , volume=. 2024 , publisher=
work page 2024
-
[18]
Fast-Time Simulation of Airport Surface Movement , author=. IEEE ICAS 2021 , year=
work page 2021
-
[19]
AIAA Aviation 2019 Forum , pages=
Departure scheduling and taxiway path planning under uncertainty , author=. AIAA Aviation 2019 Forum , pages=
work page 2019
-
[20]
Journal of Advanced Transportation , volume=
Research on Aircraft Surface Taxi Path Planning and Conflict Detection and Resolution , author=. Journal of Advanced Transportation , volume=. 2021 , publisher=
work page 2021
-
[21]
2018 Aviation Technology, Integration, and Operations Conference , pages=
Comparison of First-Come First-Served and Optimization Based Scheduling Algorithms for Integrated Departure and Arrival Management , author=. 2018 Aviation Technology, Integration, and Operations Conference , pages=
work page 2018
-
[22]
Research on taxiway path optimization based on conflict detection , author=. PloS one , volume=. 2015 , publisher=
work page 2015
-
[23]
2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC) , pages=
Verification of an Airport Taxiway Path-Finding Algorithm , author=. 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC) , pages=. 2020 , organization=
work page 2020
-
[24]
Research on aircraft surface taxiing path optimization based on A* algorithm , author=. Ninth International Conference on Electromechanical Control Technology and Transportation (ICECTT 2024) , volume=. 2024 , organization=
work page 2024
-
[25]
Journal of Advanced Transportation , volume=
A New Multiobjective A∗ Algorithm With Time Window Applied to Large Airports , author=. Journal of Advanced Transportation , volume=. 2024 , publisher=
work page 2024
-
[26]
Proximal Policy Optimization Algorithms
Proximal policy optimization algorithms , author=. arXiv preprint arXiv:1707.06347 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[27]
Richard S. Sutton and Andrew G. Barto , title =. 2018 , publisher =
work page 2018
-
[28]
Artificial intelligence , volume=
Planning and acting in partially observable stochastic domains , author=. Artificial intelligence , volume=. 1998 , publisher=
work page 1998
-
[29]
IEEE transactions on neural networks , volume=
The graph neural network model , author=. IEEE transactions on neural networks , volume=. 2008 , publisher=
work page 2008
-
[30]
Semi-Supervised Classification with Graph Convolutional Networks
Semi-supervised classification with graph convolutional networks , author=. arXiv preprint arXiv:1609.02907 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[31]
Airport Surface Arrival and Departure Scheduling Using Extended First-Come, First-Served Scheduler , author=. Aerospace , volume=. 2023 , publisher=
work page 2023
-
[32]
An Improved Genetic Algorithm-Based Traffic Scheduling Model for Airport Terminal Areas , author=. Journal of Sensors , volume=. 2022 , publisher=
work page 2022
-
[33]
Advances in neural information processing systems , volume=
The surprising effectiveness of ppo in cooperative multi-agent games , author=. Advances in neural information processing systems , volume=
-
[34]
Advances in neural information processing systems , volume=
Attention is all you need , author=. Advances in neural information processing systems , volume=
-
[35]
Cross-attention is all you need: Adapt- ing pretrained transformers for machine translation,
Cross-attention is all you need: Adapting pretrained transformers for machine translation , author=. arXiv preprint arXiv:2104.08771 , year=
-
[36]
Advances in neural information processing systems , volume=
Training stochastic model recognition algorithms as networks can lead to maximum mutual information estimation of parameters , author=. Advances in neural information processing systems , volume=
-
[37]
High-Dimensional Continuous Control Using Generalized Advantage Estimation
High-dimensional continuous control using generalized advantage estimation , author=. arXiv preprint arXiv:1506.02438 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[38]
Learning to predict by the methods of temporal differences , author=. Machine learning , volume=. 1988 , publisher=
work page 1988
-
[39]
Edsger Wybe Dijkstra: his life, work, and legacy , pages=
A note on two problems in connexion with graphs , author=. Edsger Wybe Dijkstra: his life, work, and legacy , pages=
-
[40]
Human-level control through deep reinforcement learning , author=. nature , volume=. 2015 , publisher=
work page 2015
-
[41]
Communications in Transportation Research , volume=
Towards explainable traffic flow prediction with large language models , author=. Communications in Transportation Research , volume=. 2024 , publisher=
work page 2024
-
[42]
Communications in Transportation Research , volume=
Leveraging reinforcement learning for dynamic traffic control: A survey and challenges for field implementation , author=. Communications in Transportation Research , volume=. 2023 , publisher=
work page 2023
-
[43]
Communications in Transportation Research , volume=
Bidirectional Q-learning for recycling path planning of used appliances under strong and weak constraints , author=. Communications in Transportation Research , volume=. 2024 , publisher=
work page 2024
-
[44]
Communications in Transportation Research , volume=
Gpt-4 enhanced multimodal grounding for autonomous driving: Leveraging cross-modal attention with large language models , author=. Communications in Transportation Research , volume=. 2024 , publisher=
work page 2024
-
[45]
Communications in Transportation Research , volume=
Fleet data based traffic modeling , author=. Communications in Transportation Research , volume=. 2024 , publisher=
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.