Recognition: 2 theorem links
· Lean TheoremEvidence Over Plans: Online Trajectory Verification for Skill Distillation
Pith reviewed 2026-05-12 02:32 UTC · model grok-4.3
The pith
Distilling agent skills from verified environment trajectories outperforms human-written plans.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
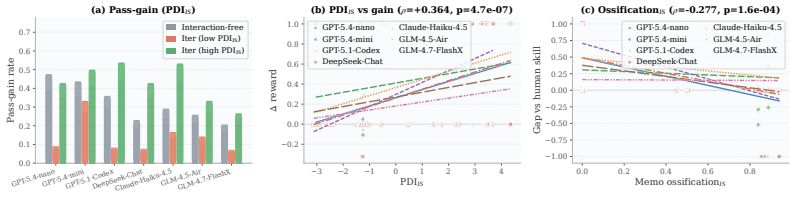
Robust skills arise when distillation is guided by the Posterior Distillation Index computed on environment-verified trajectories; this posterior approach consistently yields higher success rates and better transfer than skills drawn from prior plans or human documents, as shown across 86 tasks where student-model inference costs drop by up to 1000x.
What carries the argument
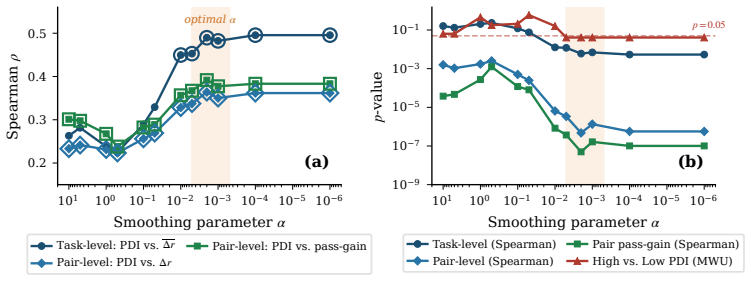
The Posterior Distillation Index (PDI), a trajectory-level metric that scores how well a distilled skill aligns with empirical task-environment evidence and functions as an online diagnostic to enforce posterior formation.
If this is right
- PDI-guided skills raise task success rates above both no-skill baselines and human-written skills.
- The resulting skills transfer reliably to student models whose inference cost is up to 1000 times lower than the teacher.
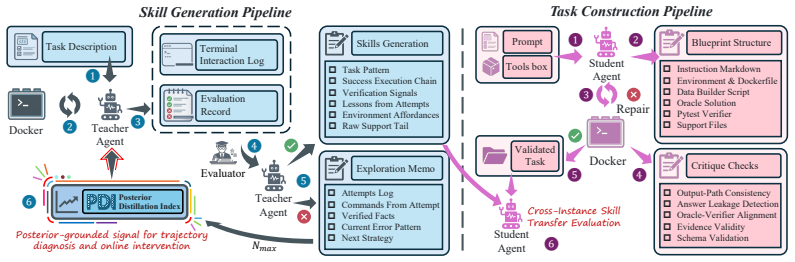
- SPARK preserves full execution evidence so that PDI can intervene during distillation to keep skills evidence-based.
- The method applies uniformly across 86 diverse runnable tasks without task-specific tuning.
Where Pith is reading between the lines
- Verification during execution may matter more than initial planning for skill quality in agent systems.
- PDI-style online checks could extend to other distillation settings where grounding in real outcomes is required.
- Reducing dependence on human procedural documents could improve scalability for open-ended tasks.
Load-bearing premise
Skills grounded in actual environment interaction after execution are more robust than those built from prior plans or human documents.
What would settle it
An experiment in which skills distilled directly from human-written plans match or exceed PDI-guided skills in success rate, transferability, and cost across the same set of 86 runnable tasks.
Figures




read the original abstract
Agent skills can remarkably improve task success rates by using human-written procedural documents, but their quality is difficult to assess without environment-grounded verification. Existing skill generation methods heavily rely on preference logs rather than direct environment interaction, often yielding negligible or even degraded gains. We identify that it is a fundamental timing bottleneck: robust skills should be posterior-based, distilled from empirical environment interaction rather than prior plans. In this study, we introduce the Posterior Distillation Index (PDI), a trajectory-level metric that quantifies how well a distilled skill is grounded in the task-environment evidence. To operationalize PDI, we present SPARK (Structured Pipelines for Autonomous Runnable tasKs and sKill generation) for preserving task execution evidence towards full trajectory-level analysis. SPARK generates environment-verified trajectories used to compute PDI, and it applies PDI as an online diagnostic and intervention signal to ensure posterior skill formation. Across 86 runnable tasks, SPARK-generated skills consistently surpass no-skill baselines and outperform human-written skills on student models (inference cost up to 1,000x cheaper than teacher models). These findings show that PDI-guided distillation produces efficient and transferable skills grounded in the task-environment interaction. We release our code at https://github.com/EtaYang10th/spark-skills .
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that robust agent skills should be posterior-based and distilled from empirical environment interaction rather than prior plans. It introduces the Posterior Distillation Index (PDI), a trajectory-level metric quantifying grounding in task-environment evidence, and SPARK, a pipeline that generates environment-verified trajectories for PDI computation while using PDI as an online diagnostic and intervention signal during skill formation. Across 86 runnable tasks, SPARK-generated skills are reported to consistently outperform no-skill baselines and human-written skills when transferred to student models (with inference costs up to 1,000x lower than teacher models), supporting the claim that PDI-guided distillation yields efficient, transferable, evidence-grounded skills. Code is released at https://github.com/EtaYang10th/spark-skills.
Significance. If the central empirical claims hold and PDI can be shown to provide independent, non-circular evidence of posterior grounding, the work would offer a meaningful advance in skill distillation for autonomous agents by shifting emphasis from preference logs or prior plans to direct environment-verified trajectories. The open release of code is a clear strength that supports reproducibility and community verification of the 86-task results.
major comments (2)
- [§3] §3 (PDI and SPARK description): The manuscript does not provide the explicit mathematical formula or derivation for the Posterior Distillation Index (PDI). Without this, it is impossible to verify whether PDI is computed independently from the candidate skill or whether it incorporates quantities derived from the same SPARK-generated trajectories used both for evaluation and as the online intervention signal, directly threatening the 'evidence over plans' distinction.
- [§5] §5 (experimental results): The claim of consistent outperformance on 86 tasks lacks any reported statistical significance tests, details on baseline implementations, controls for trajectory independence, or ablation studies isolating the contribution of PDI versus other SPARK components. This undermines confidence that gains reflect genuine posterior grounding rather than improved filtering or planning.
minor comments (2)
- The abstract states 'inference cost up to 1,000x cheaper' but does not name the specific teacher and student models or provide per-task cost breakdowns; adding this would improve clarity.
- Consider including a summary table of key metrics (success rates, costs) across the 86 tasks to allow readers to assess the scale of improvements.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback, which helps clarify key aspects of our work on PDI and SPARK. We address the major comments point by point below and commit to revisions that strengthen the manuscript without altering its core claims.
read point-by-point responses
-
Referee: [§3] §3 (PDI and SPARK description): The manuscript does not provide the explicit mathematical formula or derivation for the Posterior Distillation Index (PDI). Without this, it is impossible to verify whether PDI is computed independently from the candidate skill or whether it incorporates quantities derived from the same SPARK-generated trajectories used both for evaluation and as the online intervention signal, directly threatening the 'evidence over plans' distinction.
Authors: We acknowledge that the explicit mathematical formula and derivation for PDI were not presented with sufficient detail in §3. In the revised manuscript, we will insert the full definition of PDI as a trajectory-level metric computed exclusively from post-execution environment evidence (e.g., success indicators, state transitions, and task-completion signals) without reference to skill parameters or prior plans. The derivation will explicitly separate the metric computation from SPARK's use of PDI as an online intervention signal, demonstrating that PDI itself remains an independent, evidence-only quantity that does not create circularity with the trajectories used for skill distillation. revision: yes
-
Referee: [§5] §5 (experimental results): The claim of consistent outperformance on 86 tasks lacks any reported statistical significance tests, details on baseline implementations, controls for trajectory independence, or ablation studies isolating the contribution of PDI versus other SPARK components. This undermines confidence that gains reflect genuine posterior grounding rather than improved filtering or planning.
Authors: We agree that the experimental section would benefit from greater statistical rigor and controls. In the revision, we will add paired statistical significance tests (e.g., Wilcoxon signed-rank or t-tests) across the 86 tasks to support the outperformance claims. We will also expand the text with precise descriptions of baseline implementations (no-skill and human-written skills), explicit controls for trajectory independence, and ablation studies that isolate PDI by comparing full SPARK against SPARK variants that omit the PDI intervention signal. These additions will directly address whether observed gains stem from posterior grounding. revision: yes
Circularity Check
No significant circularity: PDI is an internal guidance signal but central claims rest on external task-success metrics.
full rationale
The paper defines PDI as a trajectory-level metric computed from environment-verified runs produced by SPARK and deploys it as an online intervention during skill formation. However, the load-bearing empirical claims (outperformance on 86 tasks versus no-skill baselines and human-written skills, plus transfer to student models) are measured by independent success rates rather than by PDI values themselves. No equations, self-citations, or definitional steps are shown that would make the reported gains reduce to a tautology or a fit of the same quantity used for guidance. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Robust skills should be posterior-based, distilled from empirical environment interaction rather than prior plans.
invented entities (1)
-
Posterior Distillation Index (PDI)
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
PDI = z(ϕ_exec) − z(ϕ_plan) − z(ϕ_oss) ... using Jensen–Shannon divergence ... execution grounding ϕ_exec = ψ(P_E, P_s), plan copying ϕ_plan = ψ(P_P, P_s)
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
SPARK generates environment-verified trajectories ... applies PDI as an online diagnostic and intervention signal
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Evoskill: Automated skill discovery for multi-agent systems.arXiv preprint arXiv:2603.02766, 2026
Salaheddin Alzubi, Noah Provenzano, Jaydon Bingham, Weiyuan Chen, and Tu Vu. EvoSkill: Automated skill discovery for multi-agent systems.arXiv preprint arXiv:2603.02766, 2026
-
[2]
Large language models as tool makers
Tianle Cai, Xuezhi Wang, Tengyu Ma, Xinyun Chen, and Denny Zhou. Large language models as tool makers. InInternational Conference on Learning Representations (ICLR), 2024
work page 2024
-
[3]
arXiv preprint arXiv:2603.00718 , year=
Shiqi Chen, Jingze Gai, Ruochen Zhou, Jinghan Zhang, Tongyao Zhu, Junlong Li, Kangrui Wang, Zihan Wang, Zhengyu Chen, Klara Kaleb, Ning Miao, Siyang Gao, Cong Lu, Manling Li, Junxian He, and Yee Whye Teh. SkillCraft: Can LLM agents learn to use tools skillfully? arXiv preprint arXiv:2603.00718, 2026
-
[4]
Kanzhi Cheng, Qiushi Sun, Yougang Chu, Fangzhi Xu, Yantao Li, Jianbing Zhang, and Zhiyong Wu
Tianyi Chen, Yinheng Li, Michael Solodko, Sen Wang, Nan Jiang, Tingyuan Cui, Junheng Hao, Jongwoo Ko, Sara Abdali, Leon Xu, Suzhen Zheng, Hao Fan, Pashmina Cameron, Justin Wagle, and Kazuhito Koishida. CUA-Skill: Develop skills for computer using agent.arXiv preprint arXiv:2601.21123, 2026
-
[5]
SkillsBench: Benchmarking How Well Agent Skills Work Across Diverse Tasks
Xiangyi Li, Wenbo Chen, Yimin Liu, Shenghan Zheng, Xiaokun Chen, Yifeng He, Yubo Li, Bingran You, Haotian Shen, Jiankai Sun, et al. SkillsBench: Benchmarking how well agent skills work across diverse tasks.arXiv preprint arXiv:2602.12670, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[6]
SkillNet: Create, evaluate, and connect AI skills,
Yuan Liang, Ruobin Zhong, Haoming Xu, Chen Jiang, Yi Zhong, Runnan Fang, Jia-Chen Gu, Shumin Deng, Yunzhi Yao, Mengru Wang, et al. SkillNet: Create, evaluate, and connect AI skills.arXiv preprint arXiv:2603.04448, 2026
-
[7]
How Well Do Agentic Skills Work in the Wild: Benchmarking LLM Skill Usage in Realistic Settings
Yujian Liu, Jiabao Ji, Li An, Tommi Jaakkola, Yang Zhang, and Shiyu Chang. How well do agentic skills work in the wild: Benchmarking LLM skill usage in realistic settings.arXiv preprint arXiv:2604.04323, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[8]
Zhengxi Lu, Zhiyuan Yao, Jinyang Wu, Chengcheng Han, Qi Gu, Xunliang Cai, Weiming Lu, Jun Xiao, Yueting Zhuang, and Yongliang Shen. SKILL0: In-context agentic reinforcement learning for skill internalization.arXiv preprint arXiv:2604.02268, 2026
-
[9]
Trace2Skill: Distill Trajectory-Local Lessons into Transferable Agent Skills
Jingwei Ni, Yihao Liu, Xinpeng Liu, Yutao Sun, Mengyu Zhou, Pengyu Cheng, Dexin Wang, Erchao Zhao, Xiaoxi Jiang, and Guanjun Jiang. Trace2Skill: Distill trajectory-local lessons into transferable agent skills.arXiv preprint arXiv:2603.25158, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[10]
Fung, Yujia Qin, Zhiyuan Liu, and Heng Ji
Cheng Qian, Chi Han, Yi R. Fung, Yujia Qin, Zhiyuan Liu, and Heng Ji. CREATOR: Tool creation for disentangling abstract and concrete reasoning of large language models. InFindings of the Association for Computational Linguistics: EMNLP 2023, 2023
work page 2023
-
[11]
ToolLLM: Facilitating large language models to master 16000+ real-world APIs
Yujia Qin, Shihao Liang, Yining Ye, Kunlun Zhu, Lan Yan, Yaxi Lu, Yankai Lin, Xin Cong, Xiangru Tang, Bill Qian, et al. ToolLLM: Facilitating large language models to master 16000+ real-world APIs. InInternational Conference on Learning Representations (ICLR), 2024
work page 2024
-
[12]
Libin Qiu, Zhirong Gao, Junfu Chen, Yuhang Ye, Weizhi Huang, Xiaobo Xue, Wenkai Qiu, and Shuo Tang. AutoRefine: From trajectories to reusable expertise for continual LLM agent refinement.arXiv preprint arXiv:2601.22758, 2026
-
[13]
Toolformer: Language models can teach themselves to use tools
Timo Schick, Jane Dwivedi-Yu, Roberto Dessì, Roberta Raileanu, Maria Lomeli, Eric Hambro, Luke Zettlemoyer, Nicola Cancedda, and Thomas Scialom. Toolformer: Language models can teach themselves to use tools. InAdvances in Neural Information Processing Systems (NeurIPS), 2023
work page 2023
-
[14]
Reflexion: Language agents with verbal reinforcement learning
Noah Shinn, Federico Cassano, Edward Berman, Ashwin Gopinath, Karthik Narasimhan, and Shunyu Yao. Reflexion: Language agents with verbal reinforcement learning. InAdvances in Neural Information Processing Systems (NeurIPS), 2023. 10
work page 2023
-
[15]
ALFWorld: Aligning text and embodied environments for interactive learning
Mohit Shridhar, Xingdi Yuan, Marc-Alexandre Côté, Yonatan Bisk, Adam Trischler, and Matthew Hausknecht. ALFWorld: Aligning text and embodied environments for interactive learning. InInternational Conference on Learning Representations, 2021
work page 2021
-
[16]
Trial and error: Exploration-based trajectory optimization for LLM agents
Yifan Song, Da Yin, Xiang Yue, Jie Huang, Sujian Li, and Bill Yuchen Lin. Trial and error: Exploration-based trajectory optimization for LLM agents. InProceedings of the 62nd Annual Meeting of the Association for Computational Linguistics (ACL), 2024
work page 2024
-
[17]
SkillX: Automatically Constructing Skill Knowledge Bases for Agents
Chenxi Wang, Zhuoyun Yu, Xin Xie, Wuguannan Yao, Runnan Fang, et al. SkillX: Auto- matically constructing skill knowledge bases for agents.arXiv preprint arXiv:2604.04804, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[18]
Voyager: An Open-Ended Embodied Agent with Large Language Models
Guanzhi Wang, Yuqi Xie, Yunfan Jiang, Ajay Mandlekar, Chaowei Xiao, Yuke Zhu, Linxi Fan, and Anima Anandkumar. V oyager: An open-ended embodied agent with large language models. arXiv preprint arXiv:2305.16291, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[19]
SkillRL: Evolving Agents via Recursive Skill-Augmented Reinforcement Learning
Peng Xia, Jianwen Chen, Hanyang Wang, Jiaqi Liu, Kaide Zeng, Yu Wang, Siwei Han, Yiyang Zhou, Xujiang Zhao, Haifeng Chen, Zeyu Zheng, Cihang Xie, and Huaxiu Yao. SkillRL: Evolving agents via recursive skill-augmented reinforcement learning.arXiv preprint arXiv:2602.08234, 2026
work page internal anchor Pith review arXiv 2026
-
[20]
AgentTrek: Agent trajectory synthesis via guiding replay with web tutorials
Yiheng Xu, Dunjie Lu, Zhennan Shen, Junli Wang, Zekun Wang, Yuchen Mao, Caiming Xiong, and Tao Yu. AgentTrek: Agent trajectory synthesis via guiding replay with web tutorials. In International Conference on Learning Representations (ICLR), 2025
work page 2025
-
[21]
arXiv preprint arXiv:2603.01145 , year=
Yutao Yang, Junsong Li, Qianjun Pan, Bihao Zhan, Yuxuan Cai, Lin Du, Jie Zhou, Kai Chen, Qin Chen, Xin Li, Bo Zhang, and Liang He. AutoSkill: Experience-driven lifelong learning via skill self-evolution.arXiv preprint arXiv:2603.01145, 2026
-
[22]
ReAct: Synergizing reasoning and acting in language models
Shunyu Yao, Jeffrey Zhao, Dian Yu, Nan Du, Izhak Shafran, Karthik Narasimhan, and Yuan Cao. ReAct: Synergizing reasoning and acting in language models. InInternational Conference on Learning Representations (ICLR), 2023
work page 2023
-
[23]
arXiv preprint arXiv:2603.16856 , year=
Tianzhu Ye, Li Dong, Qingxiu Dong, Xun Wu, Shaohan Huang, and Furu Wei. Online experiential learning for language models.arXiv preprint arXiv:2603.16856, 2026
-
[24]
ExpeL: LLM agents are experiential learners
Andrew Zhao, Daniel Huang, Quentin Xu, Matthieu Lin, Yong-Jin Liu, and Gao Huang. ExpeL: LLM agents are experiential learners. InProceedings of the AAAI Conference on Artificial Intelligence (AAAI), 2024
work page 2024
-
[25]
Yanzhao Zheng, Zhentao Zhang, Chao Ma, Yuanqiang Yu, Jihuai Zhu, et al. SkillRouter: Skill routing for LLM agents at scale.arXiv preprint arXiv:2603.22455, 2026
-
[26]
Yang Zhou, Mingyu Zhao, Zhenting Wang, Difei Gu, Bangwei Guo, Ruosong Ye, Ligong Han, Can Jin, and Dimitris N Metaxas. Mˆ 3-bench: Multi-modal, multi-hop, multi-threaded tool-using mllm agent benchmark.arXiv preprint arXiv:2511.17729, 2025
-
[27]
Yang Zhou, Shiyu Zhao, Yuxiao Chen, Zhenting Wang, Can Jin, and Dimitris N Metaxas. Led: Llm enhanced open-vocabulary object detection without human curated data generation.arXiv preprint arXiv:2503.13794, 2025. 11 Appendix Content APositioning Against Prior Skill-Centric Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.