Recognition: 2 theorem links
· Lean TheoremMulti-Agent System Identification with Nonlinear Sheaf Diffusion
Pith reviewed 2026-05-13 01:38 UTC · model grok-4.3
The pith
Unique recovery of multi-agent interaction laws from trajectories holds exactly when the system's sheaf cohomology vanishes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In systems governed by a nonlinear sheaf Laplacian, edge potential functions encode the coordination law and their gradients produce the inter-agent forces observed at nodes. Trajectory data records only the summed effect of these forces at each node, so distinct potentials that agree on the node-level aggregates remain indistinguishable. The fundamental obstruction to recovery is therefore topological and measured by sheaf cohomology. Unique recovery from an unconstrained function class is possible if and only if this cohomology vanishes. When the obstruction is nontrivial, recovery inside a finite-dimensional parameterized class is possible precisely when a data-dependent informationatrixn
What carries the argument
Nonlinear sheaf Laplacian whose cohomology group measures the topological indistinguishability between distinct edge potential functions from aggregated node trajectories.
If this is right
- If sheaf cohomology vanishes, trajectory data suffice to identify the exact interaction law without parameterization.
- Non-vanishing cohomology implies that trajectory matching alone cannot certify recovery of the true potentials.
- For parameterized families, positive definiteness of the data-dependent information matrix guarantees local identifiability.
- The topological structure of the underlying sheaf determines whether full or only partial recovery is feasible.
Where Pith is reading between the lines
- Communication topologies could be designed to make sheaf cohomology vanish, thereby guaranteeing unique recovery.
- The same cohomology test might apply to time-varying or stochastic multi-agent models to decide identifiability in advance.
- Practitioners could compute the cohomology of a candidate sheaf before collecting data to choose between unconstrained or parameterized identification strategies.
Load-bearing premise
The multi-agent system is exactly governed by a nonlinear sheaf Laplacian whose edge potentials produce the observed node forces.
What would settle it
Observing two different sets of edge potentials that generate identical node trajectories in a system whose sheaf cohomology is known to be nontrivial would falsify the identifiability conditions.
Figures


read the original abstract
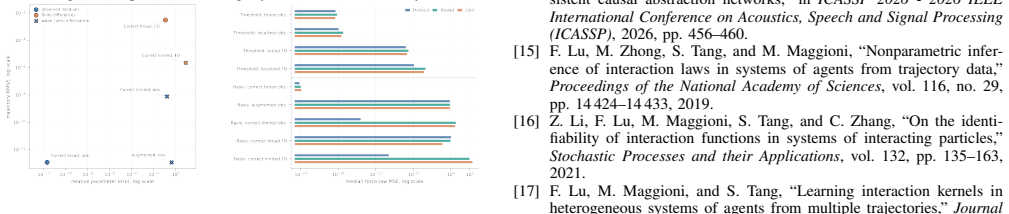
Local interaction laws governing multi-agent systems can be difficult to recover from trajectory data, even when the dynamics are observed faithfully. In systems governed by a nonlinear sheaf Laplacian -- a generalization of the graph Laplacian accommodating heterogeneous state spaces and asymmetric communication channels -- the coordination law is encoded by edge potential functions whose gradients produce the inter-agent forces. Because trajectory observations record node-state evolution, they expose only the aggregate effect of the edge forces at each node: distinct interaction laws that agree at the node level are indistinguishable from trajectory data alone. We show that the fundamental obstruction to recovery is topological, measured by sheaf cohomology, and that unique recovery from an unconstrained function class is possible if and only if this cohomology vanishes. When the obstruction is nontrivial, we show that recovery within a finite-dimensional parameterized class is possible precisely when a data-dependent information matrix is positive definite. Experiments validate the theory and illustrate that accurate trajectory reproduction need not certify recovery of the underlying interaction law.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a framework for identifying local interaction laws in multi-agent systems governed by nonlinear sheaf Laplacians, where edge potential functions encode the coordination law and their gradients produce observed inter-agent forces. Trajectory data only reveal the aggregate node-level effects, leading to potential indistinguishability of distinct laws. The central claims are that the fundamental obstruction to unique recovery from an unconstrained function class is topological and measured by sheaf cohomology, with unique recovery possible if and only if this cohomology vanishes; when the obstruction is nontrivial, recovery in a finite-dimensional parameterized class is possible precisely when a data-dependent information matrix is positive definite. Experiments are included to validate the theory while illustrating that accurate trajectory reproduction does not certify recovery of the underlying interaction law.
Significance. If the theoretical results hold, the work offers a significant contribution by linking identifiability in multi-agent systems to sheaf cohomology, providing necessary and sufficient conditions that could inform experiment design and model-class selection in networked control. The explicit separation between trajectory fitting and law recovery is a valuable practical insight for the field.
major comments (2)
- [Theory sections / main identifiability theorems] The identifiability theorems (as summarized in the abstract and developed in the theory sections) rest on the assumption that trajectories are generated exactly by the nonlinear sheaf Laplacian with no model mismatch or noise. If unmodeled terms are present, observed node aggregates need not lie in the image of any choice of edge potentials, rendering the cohomology-vanishing condition and the positive-definiteness criterion inapplicable. This modeling premise is load-bearing for both the if-and-only-if statement and the parameterized-class result; the manuscript should clarify the scope or add robustness analysis.
- [Experiments] The abstract states that accurate trajectory reproduction need not certify recovery of the interaction law. The experiments should therefore include explicit counter-examples or cases where the information matrix fails to be positive definite, to demonstrate the necessity of that condition and to avoid the appearance that fitting alone suffices.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and positive assessment of the work's potential contribution. We address each major comment below, indicating planned revisions to the manuscript.
read point-by-point responses
-
Referee: [Theory sections / main identifiability theorems] The identifiability theorems (as summarized in the abstract and developed in the theory sections) rest on the assumption that trajectories are generated exactly by the nonlinear sheaf Laplacian with no model mismatch or noise. If unmodeled terms are present, observed node aggregates need not lie in the image of any choice of edge potentials, rendering the cohomology-vanishing condition and the positive-definiteness criterion inapplicable. This modeling premise is load-bearing for both the if-and-only-if statement and the parameterized-class result; the manuscript should clarify the scope or add robustness analysis.
Authors: We agree that the identifiability results are derived under the assumption of exact trajectories generated by the nonlinear sheaf Laplacian, with no unmodeled dynamics or noise. This is the standard setting for establishing necessary and sufficient conditions in identifiability theory. In the revised manuscript, we will add explicit statements in the introduction, abstract, and theory sections clarifying that the cohomology-vanishing and positive-definiteness criteria apply to this ideal case. We will also note that robustness to noise or model mismatch is an important direction for future work, but lies outside the scope of the current theoretical development. revision: yes
-
Referee: [Experiments] The abstract states that accurate trajectory reproduction need not certify recovery of the interaction law. The experiments should therefore include explicit counter-examples or cases where the information matrix fails to be positive definite, to demonstrate the necessity of that condition and to avoid the appearance that fitting alone suffices.
Authors: We appreciate the suggestion to strengthen the experimental validation. The current experiments already include cases where trajectory fitting succeeds but the underlying law is not recovered, consistent with the abstract claim. In the revision, we will add explicit counter-examples (with corresponding figures and discussion) demonstrating scenarios where the data-dependent information matrix is not positive definite. These will illustrate non-unique recovery within the parameterized class despite accurate trajectory reproduction, directly showing the necessity of the positive-definiteness condition. revision: yes
Circularity Check
No circularity: identifiability theorems are independent mathematical equivalences
full rationale
The central claims are if-and-only-if statements linking unique recovery to vanishing sheaf cohomology (for unconstrained classes) and positive-definiteness of a data-dependent information matrix (for parameterized classes). These follow directly from the algebraic topology of the nonlinear sheaf Laplacian and the definition of node aggregates as images of edge potentials; neither direction is defined in terms of the other or reduced to a fitted quantity by construction. No self-citation is load-bearing for the uniqueness result, no ansatz is smuggled, and no known empirical pattern is merely renamed. Experiments are presented only as validation, not as the source of the theorems. The derivation remains self-contained under the stated exact-model assumption.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The multi-agent dynamics are generated by gradients of edge potential functions on a nonlinear sheaf Laplacian
- domain assumption Trajectory data faithfully records node-state evolution but only the aggregate node forces
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclearunique recovery ... if and only if this cohomology vanishes ... data-dependent information matrix is positive definite
Reference graph
Works this paper leans on
-
[1]
F. R. K. Chung,Spectral Graph Theory, ser. CBMS Regional Confer- ence Series in Mathematics. American Mathematical Society, 1997, vol. 92
work page 1997
-
[2]
Agreement problems in networks with directed graphs and switching topology,
R. Olfati-Saber and R. M. Murray, “Agreement problems in networks with directed graphs and switching topology,” inProceedings of the 42nd IEEE Conference on Decision and Control, vol. 4, 2003, pp. 4126–4132
work page 2003
-
[3]
Consensus and cooperation in networked multi-agent systems,
R. Olfati-Saber, J. A. Fax, and R. M. Murray, “Consensus and cooperation in networked multi-agent systems,”Proceedings of the IEEE, vol. 95, no. 1, pp. 215–233, 2007
work page 2007
-
[4]
A survey of multi-agent formation control,
K.-K. Oh, M.-C. Park, and H.-S. Ahn, “A survey of multi-agent formation control,”Automatica, vol. 53, pp. 424–440, 2015
work page 2015
-
[5]
Sheaves, cosheaves and applications,
J. M. Curry, “Sheaves, cosheaves and applications,” Ph.D. dissertation, University of Pennsylvania, 2014
work page 2014
-
[6]
Toward a spectral theory of cellular sheaves,
J. Hansen and R. Ghrist, “Toward a spectral theory of cellular sheaves,” Journal of Applied and Computational Topology, vol. 3, pp. 315–358, 2019
work page 2019
-
[7]
Distributed multi-agent coordination over cellular sheaves,
T. Hanks, H. Riess, S. Cohen, T. Gross, M. T. Hale, and J. P. Fairbanks, “Distributed multi-agent coordination over cellular sheaves,” in2025 IEEE 64th Conference on Decision and Control (CDC), 2025, pp. 3057–3064
work page 2025
-
[8]
Asynchronous nonlinear sheaf diffusion for multi-agent coordination,
Y . Zhao, T. Hanks, H. Riess, S. Cohen, M. T. Hale, and J. P. Fairbanks, “Asynchronous nonlinear sheaf diffusion for multi-agent coordination,” 2025
work page 2025
-
[9]
Heterogeneous multi-agent multi-target tracking using cellular sheaves,
T. Hanks, C. F. Nino, J. Bou Barcelo, A. Copeland, W. E. Dixon, and J. Fairbanks, “Heterogeneous multi-agent multi-target tracking using cellular sheaves,” 2025
work page 2025
-
[10]
Neural sheaf diffusion: A topological perspective on heterophily and oversmoothing in GNNs,
C. Bodnar, F. Di Giovanni, B. P. Chamberlain, P. Li `o, and M. M. Bronstein, “Neural sheaf diffusion: A topological perspective on heterophily and oversmoothing in GNNs,” inAdvances in Neural Information Processing Systems, vol. 35, 2022, pp. 18 527–18 541
work page 2022
-
[11]
Tangent bundle convolutional learning: From manifolds to cellular sheaves and back,
C. Battiloro, Z. Wang, H. Riess, P. Di Lorenzo, and A. Ribeiro, “Tangent bundle convolutional learning: From manifolds to cellular sheaves and back,”IEEE Transactions on Signal Processing, vol. 72, pp. 1892–1909, 2024
work page 1909
-
[12]
Sheaf diffusion goes nonlinear: Enhancing GNNs with adaptive sheaf laplacians,
O. Zaghen, A. Longa, S. Azzolin, L. Telyatnikov, A. Passerini, and P. Li `o, “Sheaf diffusion goes nonlinear: Enhancing GNNs with adaptive sheaf laplacians,” inProceedings of the Geometry-grounded Representation Learning and Generative Modeling Workshop (GRaM), ser. Proceedings of Machine Learning Research, vol. 251. PMLR, 2024, pp. 264–276
work page 2024
- [13]
-
[14]
Learning con- sistent causal abstraction networks,
G. D’Acunto, P. Di Lorenzo, and S. Barbarossa, “Learning con- sistent causal abstraction networks,” inICASSP 2026 - 2026 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2026, pp. 456–460
work page 2026
-
[15]
Nonparametric infer- ence of interaction laws in systems of agents from trajectory data,
F. Lu, M. Zhong, S. Tang, and M. Maggioni, “Nonparametric infer- ence of interaction laws in systems of agents from trajectory data,” Proceedings of the National Academy of Sciences, vol. 116, no. 29, pp. 14 424–14 433, 2019
work page 2019
-
[16]
On the identi- fiability of interaction functions in systems of interacting particles,
Z. Li, F. Lu, M. Maggioni, S. Tang, and C. Zhang, “On the identi- fiability of interaction functions in systems of interacting particles,” Stochastic Processes and their Applications, vol. 132, pp. 135–163, 2021
work page 2021
-
[17]
Learning interaction kernels in heterogeneous systems of agents from multiple trajectories,
F. Lu, M. Maggioni, and S. Tang, “Learning interaction kernels in heterogeneous systems of agents from multiple trajectories,”Journal of Machine Learning Research, vol. 22, no. 32, pp. 1–67, 2021
work page 2021
-
[18]
Learning mean-field equations from particle data using WSINDy,
D. A. Messenger and D. M. Bortz, “Learning mean-field equations from particle data using WSINDy,”Physica D: Nonlinear Phenomena, vol. 439, p. 133406, 2022
work page 2022
-
[19]
Learning sheaf laplacians from smooth signals,
J. Hansen and R. Ghrist, “Learning sheaf laplacians from smooth signals,” inICASSP 2019 - 2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2019, pp. 5446– 5450
work page 2019
-
[20]
Learning the structure of connection graphs,
L. Di Nino, G. D’Acunto, S. Barbarossa, and P. Di Lorenzo, “Learning the structure of connection graphs,” inICASSP 2026 - 2026 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2026, pp. 76–80
work page 2026
-
[21]
Network inference from consensus dynamics,
S. Segarra, M. T. Schaub, and A. Jadbabaie, “Network inference from consensus dynamics,” in2017 IEEE 56th Annual Conference on Decision and Control (CDC), 2017, pp. 3212–3217
work page 2017
-
[22]
Network inference from consensus dynamics with unknown parameters,
Y . Zhu, M. T. Schaub, A. Jadbabaie, and S. Segarra, “Network inference from consensus dynamics with unknown parameters,”IEEE Transactions on Signal and Information Processing over Networks, vol. 6, pp. 300–315, 2020
work page 2020
-
[23]
Physics informed topology learning in networks of linear dynamical systems,
S. Talukdar, D. Deka, H. Doddi, D. Materassi, M. Chertkov, and M. V . Salapaka, “Physics informed topology learning in networks of linear dynamical systems,”Automatica, vol. 112, p. 108705, 2020
work page 2020
-
[24]
Opinion dynamics on discourse sheaves,
J. Hansen and R. Ghrist, “Opinion dynamics on discourse sheaves,” SIAM Journal on Applied Mathematics, vol. 81, no. 5, pp. 2033–2060, 2021
work page 2033
-
[25]
Harmonische Funktionen und Randwertaufgaben in einem Komplex,
B. Eckmann, “Harmonische Funktionen und Randwertaufgaben in einem Komplex,”Commentarii Mathematici Helvetici, vol. 17, no. 1, pp. 240–255, 1944. APPENDIX A. Proofs This appendix proves Lemma 2, Theorem 2, its corollary, and Theorem 3. Throughout, gradients and adjoints are taken with respect to the inner products on the stalk and cochain spaces. Proof of ...
work page 1944
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.