Recognition: 2 theorem links
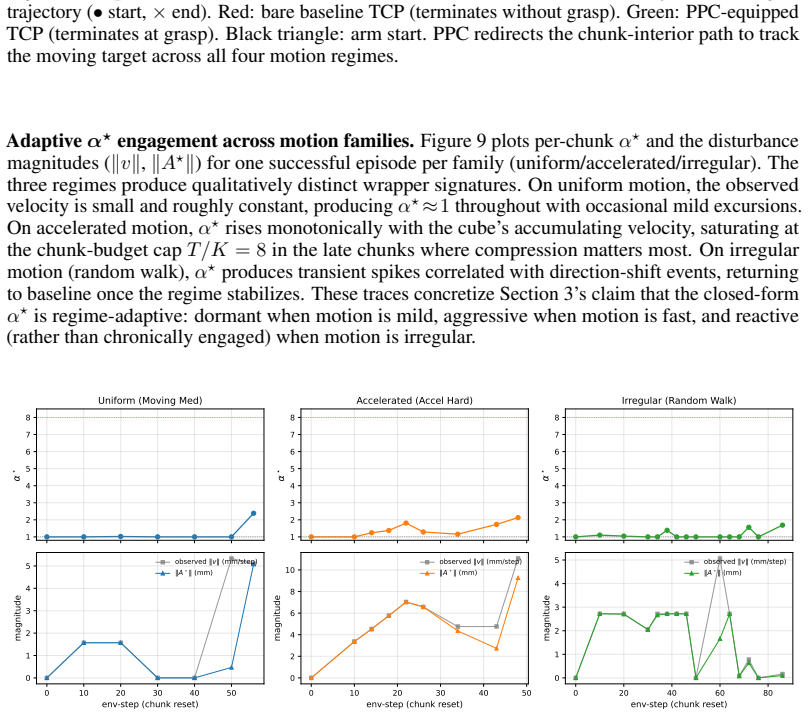
· Lean TheoremOvercoming Dynamics-Blindness: Training-Free Pace-and-Path Correction for VLA Models
Pith reviewed 2026-05-13 02:15 UTC · model grok-4.3
The pith
A training-free operator corrects chunked VLA action plans for dynamics by minimizing one quadratic cost that splits into orthogonal pace and path channels.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
From a single quadratic cost minimization over the action chunk window, a unified closed-form solution decomposes orthogonally into a pace channel that compresses execution timing along the planned direction and a path channel that applies a spatial offset perpendicular to that direction, jointly absorbing the perceived dynamics inside the window for any chunked-action VLA model.
What carries the argument
Pace-and-Path Correction operator: a training-free closed-form inference-time wrapper whose single quadratic cost minimization over the chunk window decomposes into independent pace and path correction channels.
If this is right
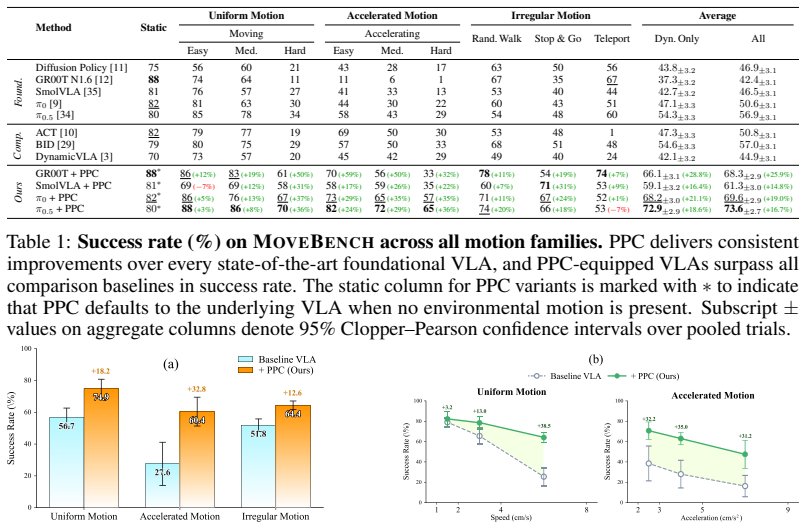
- Success rates rise by up to 28.8 percent in purely dynamic environments compared with the base VLA model.
- Success rates rise by up to 25.9 percent in mixed static-dynamic environments compared with the base VLA model.
- The method outperforms existing training-free wrappers and dynamic-adaptive baselines on the MoveBench diagnostic suite.
- The same operator applies to any chunked-action VLA without retraining or per-model retuning.
- Temporal consistency across chunks is preserved without adding latency bottlenecks.
Where Pith is reading between the lines
- Inference-time quadratic corrections may become a standard lightweight layer for any sequence model that outputs multi-step plans.
- Training data for future VLAs could focus more on static or semantic understanding if dynamics are routinely handled downstream.
- The orthogonal decomposition invites direct comparison with classical feedback controllers that separate timing from spatial tracking.
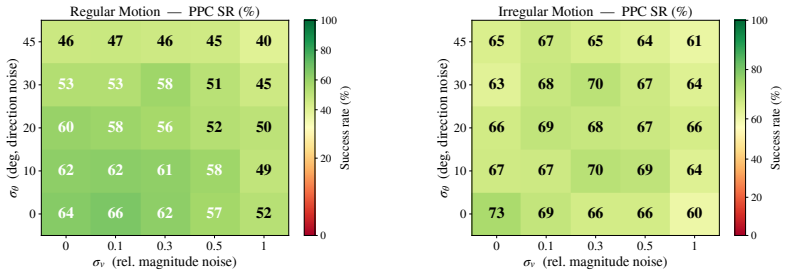
- Real-robot deployment would test whether sensor noise breaks the clean orthogonality assumed in the quadratic cost.
Load-bearing premise
A single quadratic cost minimization over the chunk window can fully absorb perceived dynamics via orthogonal pace and path channels without introducing new errors or requiring model-specific tuning.
What would settle it
In a controlled dynamic test environment, applying the correction produces lower task success rates or more collisions than the uncorrected base VLA model.
Figures




read the original abstract
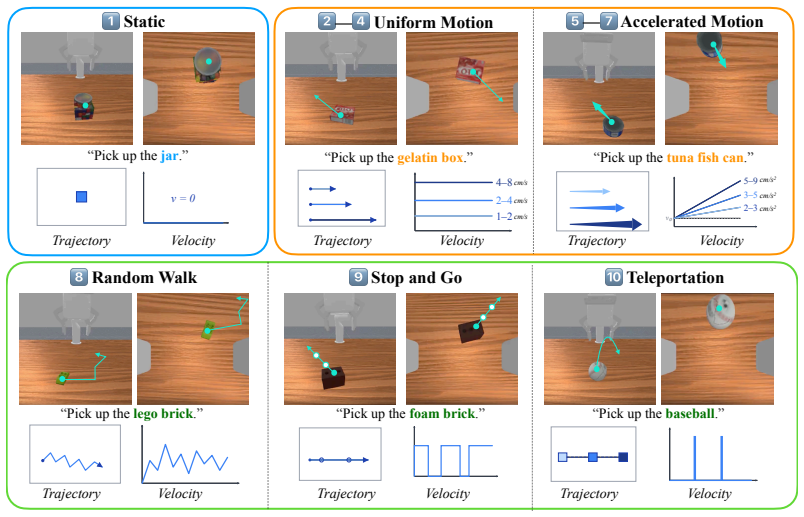
Vision-Language-Action (VLA) models achieve remarkable flexibility and generalization beyond classical control paradigms. However, most prevailing VLAs are trained under a single-frame observation paradigm, which leaves them structurally blind to temporal dynamics. Consequently, these models degrade severely in non-stationary scenarios, even when trained or finetuned on dynamic datasets. Existing approaches either require expensive retraining or suffer from latency bottlenecks and poor temporal consistency across action chunks. We propose Pace-and-Path Correction, a training-free, closed-form inference-time operator that wraps any chunked-action VLA. From a single quadratic cost, joint minimization yields a unified solution that decomposes orthogonally into two distinct channels. The pace channel compresses execution along the planned direction, while the path channel applies an orthogonal spatial offset, jointly absorbing the perceived dynamics within the chunk window. We evaluate our approach on a comprehensive diagnostic benchmark MoveBench designed to isolate motion as the sole controlled variable. Empirical results demonstrate that our framework consistently outperforms state-of-the-art training-free wrappers and dynamic-adaptive methods and improves success rates by up to 28.8% and 25.9% in absolute terms over foundational VLA models in dynamic-only and static-dynamic mixed environments, respectively.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Pace-and-Path Correction (PPC), a training-free closed-form inference-time operator for chunked-action Vision-Language-Action (VLA) models. From minimization of a single quadratic cost over the action chunk, it derives an orthogonal decomposition into a pace channel (temporal compression along the planned direction) and a path channel (orthogonal spatial offset) that jointly absorb perceived dynamics. The method is evaluated on the diagnostic MoveBench benchmark, reporting absolute success-rate gains of up to 28.8% in dynamic-only settings and 25.9% in static-dynamic mixed settings over baseline VLAs and competing training-free wrappers.
Significance. If the quadratic minimization indeed yields a parameter-free closed-form solution whose orthogonal channels remain consistent with the VLA's original action distribution, the approach would offer a lightweight, general-purpose remedy for the dynamics-blindness of single-frame-trained VLAs. The MoveBench benchmark, by isolating motion as the controlled variable, is a useful diagnostic contribution that could help the community quantify temporal robustness.
major comments (3)
- [§3.2, Eq. (4)–(7)] §3.2, Eq. (4)–(7): The manuscript states that joint minimization of a single quadratic cost produces an orthogonal decomposition into pace and path channels, yet provides no explicit derivation of the closed-form solution, no verification that the two channels remain orthogonal under the empirical distribution of VLA actions, and no error bound showing that the correction cannot introduce new inconsistencies when chunk actions already contain internal drift or higher-order dynamics.
- [§4.3, Table 3] §4.3, Table 3: The reported 28.8 % and 25.9 % absolute gains are presented without standard deviations across seeds, without statistical significance tests, and without an ablation that isolates the contribution of the quadratic assumption versus the orthogonality assumption; this leaves open the possibility that the gains are benchmark-specific rather than general.
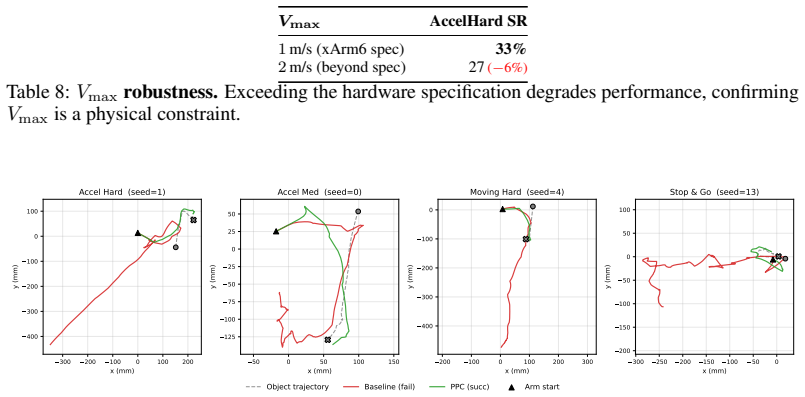
- [§3.1] §3.1: The weakest assumption—that a single quadratic cost over a fixed chunk window can fully absorb non-quadratic or coupled dynamics without new errors—is not tested with counter-examples (e.g., environments with strong acceleration or external forces); the paper should include at least one such failure-case analysis to bound the method’s applicability.
minor comments (2)
- [Abstract / §2] The abstract and §2 refer to “orthogonal decomposition” without defining the inner-product space in which orthogonality is measured; a brief sentence clarifying the metric would improve readability.
- [§4.1] MoveBench is introduced in §4.1 but lacks a concise table listing the controlled motion parameters (velocity, acceleration, jerk ranges) that would allow readers to reproduce the isolation of dynamics.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and constructive review. The comments highlight important aspects of clarity, statistical rigor, and applicability that we address point-by-point below. We have prepared revisions to strengthen the manuscript accordingly.
read point-by-point responses
-
Referee: [§3.2, Eq. (4)–(7)] §3.2, Eq. (4)–(7): The manuscript states that joint minimization of a single quadratic cost produces an orthogonal decomposition into pace and path channels, yet provides no explicit derivation of the closed-form solution, no verification that the two channels remain orthogonal under the empirical distribution of VLA actions, and no error bound showing that the correction cannot introduce new inconsistencies when chunk actions already contain internal drift or higher-order dynamics.
Authors: We agree that the derivation in §3.2 was presented at a high level for conciseness. In the revised manuscript we will insert a complete, step-by-step derivation of the closed-form solution (including the orthogonal decomposition) as a new appendix. The orthogonality follows directly from the geometry of the quadratic cost (the pace direction is the normalized action vector and the path direction is its orthogonal complement); we will add an empirical verification by projecting sampled VLA action chunks from MoveBench onto these two subspaces and reporting the inner-product statistics. For the error bound, we will include a short analysis showing that the residual error is bounded by the deviation of the true dynamics from the quadratic model within the chunk window, together with a discussion of when internal drift may violate the assumption. revision: yes
-
Referee: [§4.3, Table 3] §4.3, Table 3: The reported 28.8 % and 25.9 % absolute gains are presented without standard deviations across seeds, without statistical significance tests, and without an ablation that isolates the contribution of the quadratic assumption versus the orthogonality assumption; this leaves open the possibility that the gains are benchmark-specific rather than general.
Authors: We acknowledge the reporting omissions. The original experiments were run with three random seeds; we will augment Table 3 with mean ± standard deviation and add paired t-test p-values against the baselines. We will also insert a new ablation subsection that separately disables the quadratic cost (replacing it with a linear heuristic) and disables the orthogonality constraint (allowing coupled corrections), thereby isolating the contribution of each modeling choice. These additions will be placed in §4.3 and the supplementary material. revision: yes
-
Referee: [§3.1] §3.1: The weakest assumption—that a single quadratic cost over a fixed chunk window can fully absorb non-quadratic or coupled dynamics without new errors—is not tested with counter-examples (e.g., environments with strong acceleration or external forces); the paper should include at least one such failure-case analysis to bound the method’s applicability.
Authors: We concur that explicit failure-mode analysis is necessary to delineate the method’s scope. While MoveBench already varies velocity and acceleration, we did not include extreme external-force cases. In the revision we will add a dedicated subsection (new §4.4) that reports results on two additional diagnostic environments: (i) a high-acceleration cart-pole variant and (ii) a manipulator under sudden external torque. We will quantify the degradation and discuss the conditions under which the quadratic approximation breaks down, thereby providing the requested applicability bound. revision: yes
Circularity Check
No significant circularity; derivation is a standard closed-form quadratic minimization
full rationale
The paper presents the Pace-and-Path Correction as a training-free closed-form operator obtained directly from joint minimization of a single quadratic cost over the action chunk, yielding an orthogonal decomposition into pace (temporal) and path (spatial) channels. This is a conventional analytic result from quadratic optimization and does not reduce to fitted parameters, self-citations, or presupposed outputs by construction. No equations or steps in the provided text show the cost being defined in terms of the desired correction itself, nor any load-bearing reliance on prior self-citations for uniqueness or ansatz. The empirical performance claims are separate from the derivation and do not affect the circularity assessment. The method is self-contained against external benchmarks as a mathematical wrapper.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Dynamics within the action chunk window can be absorbed by orthogonal pace compression and path offset derived from a single quadratic cost.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel; phi_fixed_point echoesThe companion matrix has eigenvalues φ±2 where φ=(1+√5)/2 is the golden ratio. ... δ⋆_k = (1 − F_{2k+1}/F_{2K+1}) v d̂_⊥ ... Lucas-polynomial second-order branch
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanalpha_pin_under_high_calibration; J_uniquely_calibrated_via_higher_derivative echoesFrom a single quadratic cost, joint minimization yields a unified solution that decomposes orthogonally into two distinct channels.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.