Recognition: 2 theorem links
· Lean TheoremHierarchical LLM-Driven Control for HAPS-Assisted UAV Networks: Joint Optimization of Flight and Connectivity
Pith reviewed 2026-05-13 01:18 UTC · model grok-4.3
The pith
An LLM-powered hierarchical controller jointly optimizes UAV flight paths and wireless connectivity in networks with high-altitude platforms.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
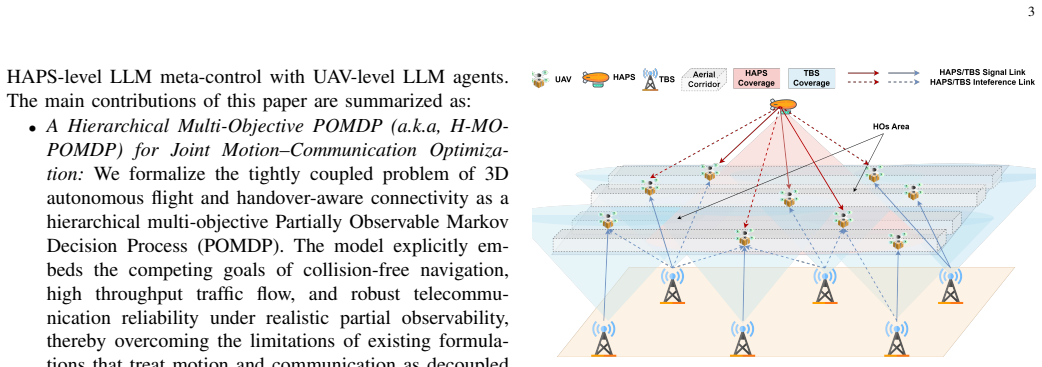
The authors claim that their LLM-driven hierarchical multi-rate control framework, derived from the H-MO-POMDP model, successfully couples long-term global planning on HAPS with fast local control on UAVs to achieve joint optimization of motion and connectivity objectives under partial observability.
What carries the argument
The hierarchical multi-rate control framework that uses an LLM-based controller on the HAPS for global load balancing and handover decisions together with hybrid LLM and reinforcement learning controllers on individual UAVs for local spatial reasoning and U2I communication.
If this is right
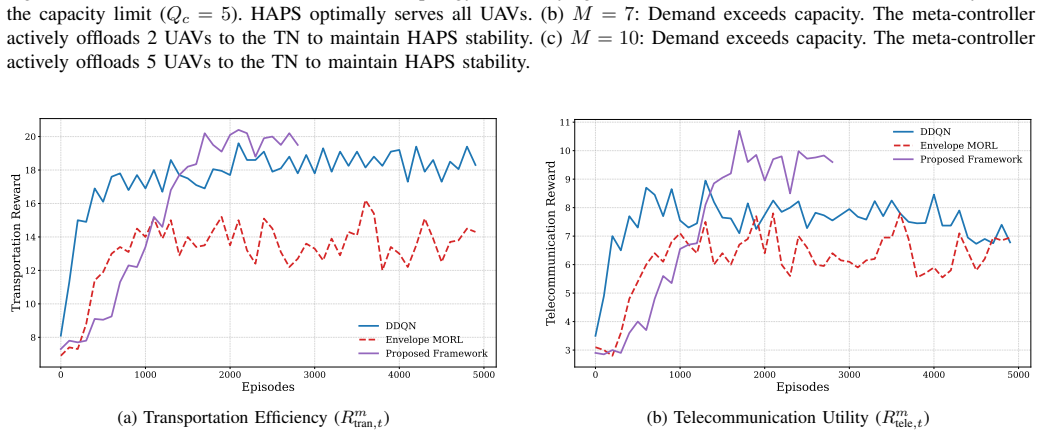
- The proposed framework increases transportation efficiency by 14 percent over state-of-the-art baselines.
- It improves telecommunication throughput by 25 percent.
- It reduces physical collision rates by 23 percent.
- It maintains strong handover stability and exhibits zero-shot generalization in changing environments.
Where Pith is reading between the lines
- Similar hierarchical LLM structures might apply to other multi-agent systems that require both high-level strategy and low-level execution, such as autonomous vehicle fleets or robotic swarms.
- The separation of slow LLM reasoning from fast RL control may reduce the computational burden on resource-limited drones.
- Extending the global planning layer to coordinate with terrestrial base stations could further improve overall network performance.
Load-bearing premise
The high-fidelity 3D simulation platform accurately represents real-world UAV flight dynamics, communication conditions, and the reasoning abilities of large language models.
What would settle it
Deploying the controllers on physical UAVs in an outdoor setting with live radio measurements and verifying whether the efficiency, throughput, and collision-reduction benefits persist.
Figures






read the original abstract
Uncrewed aerial vehicles (UAVs) are increasingly deployed in complex networked environments, yet the joint optimization of multi-UAV motion control and connectivity remains a fundamental challenge. In this paper, we study a multi-UAV system operating in an integrated terrestrial and non-terrestrial network (ITNTN) comprising terrestrial base stations and high-altitude platform stations (HAPS). We consider a three-dimensional (3D) aerial highway scenario where UAVs must adapt their motion to ensure collision avoidance, efficient traffic flow, and reliable communication under dynamic and partially observable conditions. We first model the problem as a hierarchical multi-objective partially observable Markov decision process (H-MO-POMDP), capturing the coupling between control and communication objectives. Based on this formulation, we propose a large language model (LLM)-driven hierarchical multi-rate control framework. At the global level, an LLM-based controller on the HAPS performs long-term planning for load balancing and handover decisions. At the local level, each UAV employs a hybrid controller that integrates a slow-timescale LLM for high-level spatial reasoning with a reinforcement learning agent for faster UAV-to-infrastructure (U2I) communication and motion control. We further develop a high-fidelity 3D simulation platform by integrating the gym-pybullet-drones environment with 3GPP-compliant RF/THz channel models. Numerical results demonstrate that the proposed framework significantly outperforms state-of-the-art baselines, achieving a 14% increase in transportation efficiency and a 25% improvement in telecommunication throughput. Additionally, it achieves a 23% reduction in physical collision rates, demonstrating strong handover stability and zero-shot generalization in dynamic scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper models joint UAV motion control and connectivity optimization in an ITNTN with HAPS as a hierarchical multi-objective POMDP (H-MO-POMDP). It proposes an LLM-driven hierarchical multi-rate framework with a global LLM planner on the HAPS for load balancing/handover and local hybrid LLM+RL controllers on each UAV for spatial reasoning and U2I control. A custom simulation platform integrates gym-pybullet-drones with 3GPP RF/THz models; numerical results claim 14% higher transportation efficiency, 25% higher throughput, and 23% lower collision rates versus baselines, plus handover stability and zero-shot generalization.
Significance. If the simulation faithfully reproduces partial observability, communication delays, and LLM reasoning timescales, the work offers a concrete architecture for coupling long-horizon LLM planning with fast RL control in aerial networks. The multi-rate decomposition and H-MO-POMDP formulation are reasonable modeling choices that could inform future integrated control-communication designs, though the absence of code release or hardware validation limits immediate reproducibility and impact.
major comments (3)
- [Numerical Results] Numerical Results section: the headline gains (14% transportation efficiency, 25% throughput, 23% collision reduction) are presented without naming the state-of-the-art baselines, their hyper-parameters, number of random seeds, error bars, or statistical significance tests. This information is load-bearing for the central claim that the hierarchical LLM controller is responsible for the reported deltas.
- [Simulation Platform] Simulation Platform and Evaluation sections: no ablation disables the LLM components while retaining the RL motion controller, no comparison against perfect-information oracles, and no sensitivity analysis to LLM prompt wording or inference latency. Because all quantitative claims rest on the gym-pybullet-drones + 3GPP platform faithfully implementing the partial observability assumed by the H-MO-POMDP, these omissions prevent attribution of gains to the proposed framework rather than simulator artifacts.
- [Problem Formulation] Problem Formulation and Framework sections: the H-MO-POMDP is introduced as the modeling foundation, yet the manuscript provides no derivation showing how the hierarchical multi-rate structure reduces the POMDP to tractable sub-problems or how the LLM policies are formally mapped onto the action spaces; without this, it is unclear whether the numerical improvements follow from the model or from ad-hoc engineering choices.
minor comments (2)
- [Abstract] The abstract and introduction refer to 'state-of-the-art baselines' without citation or brief description; adding one sentence naming the closest prior RL or optimization methods would improve readability.
- [Figures] Figure captions for the simulation environment and architecture diagrams should explicitly state the timescales (global vs. local) and the exact interface between LLM outputs and RL actions to avoid ambiguity.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. The comments identify key areas where additional details and analyses will strengthen the presentation and attribution of results. We address each major comment below and commit to revisions that enhance clarity and rigor without altering the core contributions.
read point-by-point responses
-
Referee: [Numerical Results] Numerical Results section: the headline gains (14% transportation efficiency, 25% throughput, 23% collision reduction) are presented without naming the state-of-the-art baselines, their hyper-parameters, number of random seeds, error bars, or statistical significance tests. This information is load-bearing for the central claim that the hierarchical LLM controller is responsible for the reported deltas.
Authors: We agree that these details are necessary to substantiate the performance claims. In the revised manuscript, we will explicitly name and reference the state-of-the-art baselines (including pure RL, heuristic, and non-hierarchical LLM variants), provide complete hyper-parameter tables, report all metrics averaged over 10 independent random seeds with standard error bars, and include statistical significance tests (e.g., paired t-tests with p-values) to confirm the deltas are significant. This will directly support attribution to the proposed hierarchical framework. revision: yes
-
Referee: [Simulation Platform] Simulation Platform and Evaluation sections: no ablation disables the LLM components while retaining the RL motion controller, no comparison against perfect-information oracles, and no sensitivity analysis to LLM prompt wording or inference latency. Because all quantitative claims rest on the gym-pybullet-drones + 3GPP platform faithfully implementing the partial observability assumed by the H-MO-POMDP, these omissions prevent attribution of gains to the proposed framework rather than simulator artifacts.
Authors: We acknowledge the need for these controls to isolate contributions. We will add an ablation that disables LLM components while retaining the RL motion controller, include comparisons against perfect-information oracles (by relaxing partial observability in controlled simulation runs), and perform sensitivity analyses on prompt variations and inference latency (by testing multiple prompt templates and emulating latency ranges). These will be presented in an expanded Evaluation section to demonstrate that gains arise from the hierarchical LLM-RL integration rather than platform specifics. revision: yes
-
Referee: [Problem Formulation] Problem Formulation and Framework sections: the H-MO-POMDP is introduced as the modeling foundation, yet the manuscript provides no derivation showing how the hierarchical multi-rate structure reduces the POMDP to tractable sub-problems or how the LLM policies are formally mapped onto the action spaces; without this, it is unclear whether the numerical improvements follow from the model or from ad-hoc engineering choices.
Authors: We agree that a formal derivation would improve rigor and clarify the link between model and results. In the revision, we will insert a new subsection deriving the decomposition of the H-MO-POMDP into multi-rate sub-problems (global long-horizon vs. local fast-timescale) and explicitly mapping LLM-generated high-level decisions to the corresponding action spaces, showing how this structure yields tractability and the observed gains. This will address concerns about ad-hoc choices. revision: yes
Circularity Check
No circularity: new H-MO-POMDP formulation and LLM controller yield simulation results without self-referential reduction
full rationale
The paper presents a novel hierarchical multi-objective POMDP (H-MO-POMDP) model for joint UAV motion and connectivity optimization, followed by a proposed LLM-driven multi-rate controller architecture and a custom 3D simulation platform. Performance deltas (14% efficiency, 25% throughput, 23% collision reduction) are reported as outputs of this new construction evaluated in the simulator. No equations, fitted parameters, or claims are shown to reduce by construction to the inputs or to prior self-citations; the derivation chain from problem formulation to controller design to numerical evaluation remains independent and self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The UAV system dynamics and communication environment can be accurately captured by a hierarchical multi-objective partially observable Markov decision process (H-MO-POMDP)
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We first model the problem as a hierarchical multi-objective partially observable Markov decision process (H-MO-POMDP), capturing the coupling between control and communication objectives.
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We consider a three-dimensional (3D) aerial highway scenario where UAVs must adapt their motion...
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Deep learning for channel tracking in irs-assisted UA V communication systems,
J. Yuet al., “Deep learning for channel tracking in irs-assisted UA V communication systems,”IEEE Trans. Wireless Commun., vol. 21, no. 9, pp. 7711–7722, 2022
work page 2022
-
[2]
3D aerial highway: The key enabler of the retail industry transformation,
N. Cherifet al., “3D aerial highway: The key enabler of the retail industry transformation,”IEEE Commun. Mag., vol. 59, no. 9, pp. 65– 71, 2021
work page 2021
-
[3]
Z. Yanet al., “Hierarchical and Collaborative LLM-Based Control for Multi-UA V Motion and Communication in Integrated Terrestrial and Non-Terrestrial Networks,”arXiv preprint arXiv:2506.06532, 2025
-
[4]
HAPS-ITS: Enabling future its services in trans-continental highways,
W. Jaafar and H. Yanikomeroglu, “HAPS-ITS: Enabling future its services in trans-continental highways,”IEEE Commun. Mag., vol. 60, no. 10, pp. 80–86, 2022
work page 2022
-
[5]
Q. Renet al., “Caching and computation offloading in high altitude platform station (HAPS) assisted intelligent transportation systems,” IEEE Trans. Wireless Commun., vol. 21, no. 11, pp. 9010–9024, 2022
work page 2022
-
[6]
Energy-efficient vehicular task offloading using multi- mode MEC and RIS-equipped aerial platforms,
I. Rziget al., “Energy-efficient vehicular task offloading using multi- mode MEC and RIS-equipped aerial platforms,”IEEE Op. J. of the Commun. Soc., vol. 6, pp. 7604–7619, 2025
work page 2025
-
[7]
Z. Yanet al., “Multi-UA V speed control with collision avoidance and handover-aware cell association: DRL with action branching,” inProc. IEEE Global Commun. Conf. (GLOBECOM), 2023, pp. 5067–5072
work page 2023
-
[8]
N. Cherifet al., “RL-based cargo-UA V trajectory planning and cell association for minimum handoffs, disconnectivity, and energy consump- tion,”IEEE Trans. Veh. Technol., vol. 73, no. 5, pp. 7304–7309, 2024
work page 2024
-
[9]
Design considerations for autonomous cargo trans- portation multirotor UA Vs,
D. Kotarskiet al., “Design considerations for autonomous cargo trans- portation multirotor UA Vs,” inSelf-Driving Vehicles and Enabling Technologies, ser. Artificial Intelligence, V olume 6, M. G ˘aiceanu and A. Engelbrecht, Eds. London, U.K.: IntechOpen, 2021
work page 2021
-
[10]
BDFL: A byzantine-fault-tolerance decentralized federated learning method for autonomous vehicle,
J.-H. Chenet al., “BDFL: A byzantine-fault-tolerance decentralized federated learning method for autonomous vehicle,”IEEE Trans. Veh. Technol., vol. 70, no. 9, pp. 8639–8652, 2021
work page 2021
-
[11]
3D trajectory optimization for energy-efficient UA V communication: A control design perspective,
B. Liet al., “3D trajectory optimization for energy-efficient UA V communication: A control design perspective,”IEEE Trans. Wireless Commun., vol. 21, no. 6, pp. 4579–4593, 2021
work page 2021
-
[12]
R. Zhanget al., “Game of drones: Multi-UA V pursuit-evasion game with online motion planning by deep reinforcement learning,”IEEE Trans. Neural Netw. Learn. Syst., vol. 34, no. 10, pp. 7900–7909, 2022
work page 2022
-
[13]
3D multi-UA V cooperative velocity-aware motion plan- ning,
Y . Huet al., “3D multi-UA V cooperative velocity-aware motion plan- ning,”Future Generation Computer Systems, vol. 102, pp. 762–774, 2020
work page 2020
-
[14]
Disconnectivity-aware energy-efficient cargo-UA V trajectory planning with minimum handoffs,
N. Cherifet al., “Disconnectivity-aware energy-efficient cargo-UA V trajectory planning with minimum handoffs,” inProc. IEEE Int. Conf. Commun. (ICC), 2021, pp. 1–6
work page 2021
-
[15]
X. Liet al., “A novel UA V-enabled data collection scheme for intelligent transportation system through UA V speed control,”IEEE Trans. Intelli. Transport. Syst., vol. 22, no. 4, pp. 2100–2110, 2020
work page 2020
-
[16]
Unmanned aerial vehicles (UA Vs): Collision avoid- ance systems and approaches,
J. N. Yasinet al., “Unmanned aerial vehicles (UA Vs): Collision avoid- ance systems and approaches,”IEEE Access, vol. 8, pp. 105 139– 105 155, 2020
work page 2020
-
[17]
N. Cherifet al., “UA V-based cargo-UA V trajectory planning and cell association for minimum handoffs, disconnectivity, and energy consump- tion,”IEEE Trans. Veh. Technol., vol. 73, no. 5, pp. 7304–7309, 2023
work page 2023
-
[18]
Efficient drone mobility support using reinforcement learning,
Y . Chenet al., “Efficient drone mobility support using reinforcement learning,” inProc. IEEE Wireless Commun. Network. Conf. (WCNC), 2020, pp. 1–6
work page 2020
-
[19]
Z. Yanet al., “CVaR-based variational quantum optimization for user association in handoff-aware vehicular networks,” inProc. IEEE Int. Conf. Commun. (ICC), 2025, pp. 6088–6093
work page 2025
-
[20]
H. Shoaib and H. Tabassum, “Optimization of speed and network deployment for reliable V2I communication in the presence of handoffs and interference,”IEEE Wireless Commun. Lett., vol. 12, no. 6, pp. 1051–1055, 2023
work page 2023
-
[21]
Q. Renet al., “Handoff-aware distributed computing in high altitude platform station (HAPS)–assisted vehicular networks,”IEEE Trans. Wireless Commun., vol. 22, no. 12, pp. 8814–8827, 2023
work page 2023
-
[22]
J. Chenet al., “Dynamic optimization of vehicle production planning in transportation networks using federated reinforcement learning,”IEEE Trans. Intelli. Transport. Syst., vol. 27, no. 2, pp. 2528–2540, 2026
work page 2026
-
[23]
Hybrid LLM-DDQN-Based Joint Optimization of V2I Communication and Autonomous Driving,
Z. Yanet al., “Hybrid LLM-DDQN-Based Joint Optimization of V2I Communication and Autonomous Driving,”IEEE Wireless Commun. Lett., vol. 14, no. 4, pp. 1214–1218, 2025. 15
work page 2025
-
[24]
Quadcopter trajectory generation based on large language model,
N. Sutraet al., “Quadcopter trajectory generation based on large language model,” inProc. IEEE Int. Conf. Artif. Intell. Mechatron. Syst. (AIMS), 2025
work page 2025
-
[25]
REAL: Resilience and adaptation using large language models on autonomous aerial robots,
A. Tagliabueet al., “REAL: Resilience and adaptation using large language models on autonomous aerial robots,” inProc. IEEE Conf. Decis. Control (CDC). IEEE, 2024
work page 2024
-
[26]
LLM-based decision making framework for au- tonomous drone navigation,
M. A. Baiget al., “LLM-based decision making framework for au- tonomous drone navigation,” inProc. IEEE Int. Conf. AI Cybersecurity (ICAIC), 2026
work page 2026
-
[27]
J. Chenet al., “A robust aggregation of federated large language models for multimodal knowledge discovery in computational social systems,” IEEE Trans. Comput. Social Syst., vol. 12, no. 6, pp. 5433–5448, 2025
work page 2025
-
[28]
Design, implementation, and deployment of multi-task neural networks in programmable data-planes,
K. Zhanget al., “Design, implementation, and deployment of multi-task neural networks in programmable data-planes,”IEEE Trans. Netw. Serv. Manag., vol. 23, pp. 740–755, 2025
work page 2025
-
[29]
LLM-enabled in-context learning for data collection scheduling in UA V-assisted sensor networks,
Y . Emamiet al., “LLM-enabled in-context learning for data collection scheduling in UA V-assisted sensor networks,”IEEE Internet of Things J., vol. 12, no. 23, pp. 51 664–51 676, 2025
work page 2025
-
[30]
S. Hanet al., “Research on the construction and resource optimization of a UA V command information system based on large language models,” Drones, vol. 9, no. 9, 2025
work page 2025
-
[31]
Large language model-assisted uav operations and communications: A multifaceted survey and tutorial,
Y . Emami, H. Zhou, R. Reddy, A. H. Arani, B. Wang, K. Li, L. Almeida, and Z. Han, “Large language model-assisted uav operations and communications: A multifaceted survey and tutorial,”arXiv preprint arXiv:2602.19534, 2026
-
[32]
D. Yuanet al., “Enhancing large language models (LLMs) for telecom using dynamic knowledge graphs and explainable retrieval-augmented generation,”IEEE Wireless Commun., Early Access, pp. 1–9, 2026
work page 2026
-
[33]
Reinforcement learning for joint V2I network selection and autonomous driving policies,
Z. Yan and H. Tabassum, “Reinforcement learning for joint V2I network selection and autonomous driving policies,” inProc. IEEE Global Commun. Conf. (GLOBECOM), 2022, pp. 1241–1246
work page 2022
-
[34]
Energy efficient and AoI-aware resource allocation for UA V-assisted its networks,
F. Yanget al., “Energy efficient and AoI-aware resource allocation for UA V-assisted its networks,”IEEE Trans. Veh. Technol., vol. 75, no. 4, pp. 6141–6156, 2026
work page 2026
-
[35]
Action branching architectures for deep reinforce- ment learning,
A. Tavakoliet al., “Action branching architectures for deep reinforce- ment learning,” inProc. AAAI Conf. Artif. Intell. (AAAI), 2018, pp. 4131–4138
work page 2018
-
[36]
J. Paneratiet al., “Learning to fly—a gym environment with pybullet physics for reinforcement learning of multi-agent quadcopter control,” in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2021, pp. 7512– 7519
work page 2021
-
[37]
Study on Enhanced LTE Support for Aerial Vehicles (Release 15), TR 36.777,
3GPP, “Study on Enhanced LTE Support for Aerial Vehicles (Release 15), TR 36.777,” 3rd Generation Partnership Project (3GPP), Technical Report TR 36.777, Jun. 2018, release
work page 2018
-
[38]
[Online]. Available: https://portal.3gpp.org/desktopmodules/ Specifications/SpecificationDetails.aspx?specificationId=3231
-
[39]
Cellular-connected UA V in next-generation wireless net- works,
N. Cherif, “Cellular-connected UA V in next-generation wireless net- works,” Ph.D. dissertation, Univ. Ottawa, 2022
work page 2022
-
[40]
A. Alsharoa and M.-S. Alouini, “Improvement of the global connectiv- ity using integrated satellite-airborne-terrestrial networks with resource optimization,”IEEE Trans. Wireless Commun., vol. 19, no. 8, pp. 5088– 5100, 2020
work page 2020
-
[41]
System identification of the crazyflie 2.0 nano quadrocopter,
J. F ¨orster, “System identification of the crazyflie 2.0 nano quadrocopter,” Master’s Thesis, ETH Zurich, 2015
work page 2015
-
[42]
Quadrotor kinematics and dynamics,
C. Powerset al., “Quadrotor kinematics and dynamics,” inSpringer Handbook of Robot.Springer Netherlands, 2015, pp. 307–328
work page 2015
-
[43]
Neural lander: Stable drone landing control using learned dynamics,
G. Shiet al., “Neural lander: Stable drone landing control using learned dynamics,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2019, pp. 9784–9790
work page 2019
-
[44]
Z. Yan and H. Tabassum, “Generalized multi-objective reinforcement learning with envelope updates in URLLC-enabled vehicular networks,” IEEE Trans. Veh. Technol., vol. 74, no. 11, pp. 17 666–17 682, 2025
work page 2025
-
[45]
Ollama: Run large language models locally,
Ollama, “Ollama: Run large language models locally,” https://ollama. com, 2024, accessed: 2026-04-08
work page 2024
-
[46]
A. Yanget al., “Qwen3 technical report,”arXiv preprint arXiv:2505.09388, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.