Recognition: no theorem link
Time-variant reliability using time-dependent surrogate models
Pith reviewed 2026-05-13 03:20 UTC · model grok-4.3
The pith
Manifold-NARX and functional NARX surrogates, with biased sampling, enable accurate first-passage probability estimates for time-dependent dynamical systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The mNARX and F-NARX frameworks construct surrogate models for time-variant reliability problems by embedding physical insight into regression formulations on reduced manifolds or principal component features, and when used with biased experimental designs, they accurately capture tail behavior for precise first-passage probability estimates.
What carries the argument
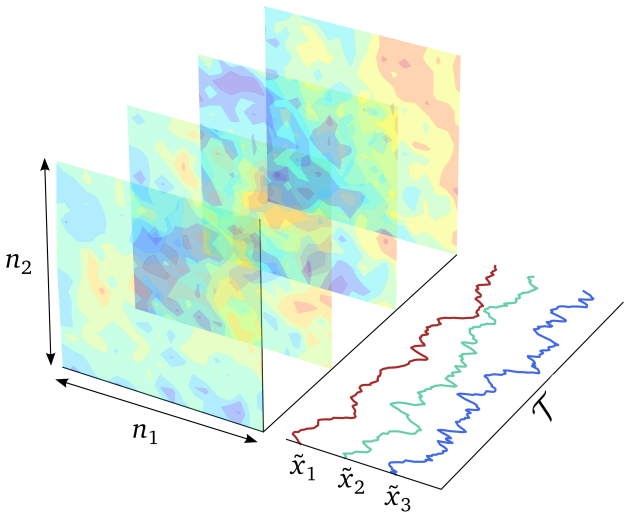
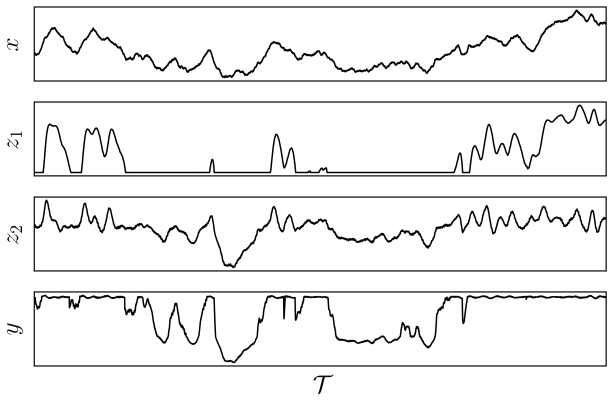
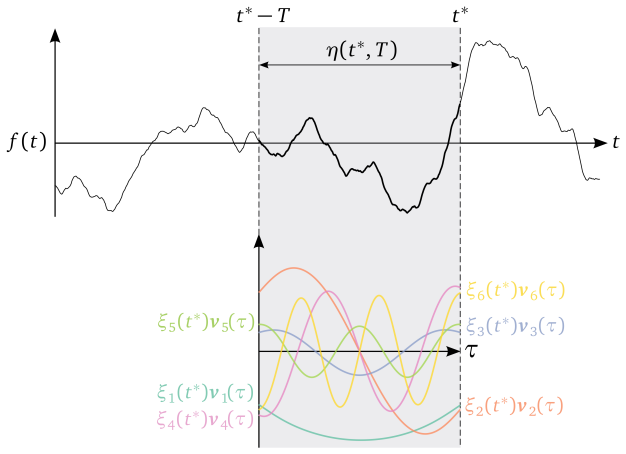
mNARX constructs the surrogate on a reduced-order manifold of auxiliary state variables, while F-NARX extracts principal component features from continuous time windows to handle trajectories.
If this is right
- First-passage probabilities can be estimated with far fewer model evaluations than standard Monte Carlo for high-dimensional stochastic excitations.
- The surrogates handle long-memory effects and avoid arbitrary lag selection in discrete time series.
- Tail behavior of system responses becomes accessible without full exploration of the input space.
- Both frameworks extend established surrogate techniques like polynomial chaos and Kriging to time-dependent reliability settings.
Where Pith is reading between the lines
- The methods may generalize to other time-evolving quantities such as cumulative damage or fatigue life under stochastic loading.
- Automated selection of the manifold dimension or number of principal components could further reduce reliance on expert physical insight.
- Similar reduced-order trajectory modeling might improve efficiency in related areas like stochastic control or real-time monitoring of dynamical systems.
Load-bearing premise
The chosen reduced manifold or principal components, together with biased sampling, must be sufficient to represent the extreme tail behavior of the true dynamical system without introducing bias in the failure probability estimate.
What would settle it
Direct Monte Carlo simulation on the benchmark systems using the same biased experimental designs would produce failure probability estimates that differ substantially from those given by the mNARX or F-NARX surrogates.
Figures





read the original abstract
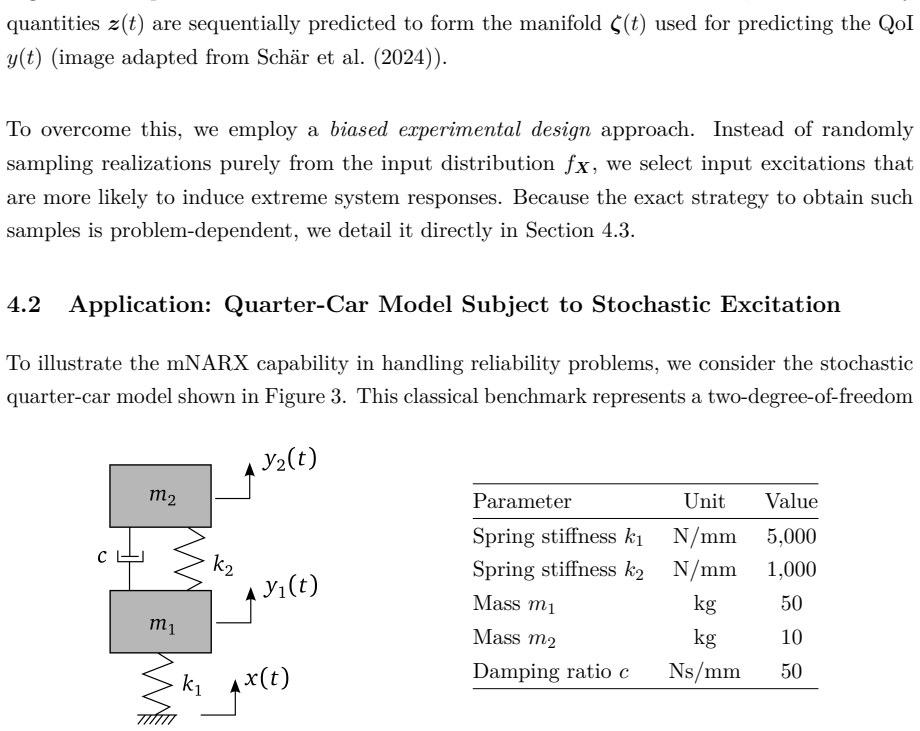
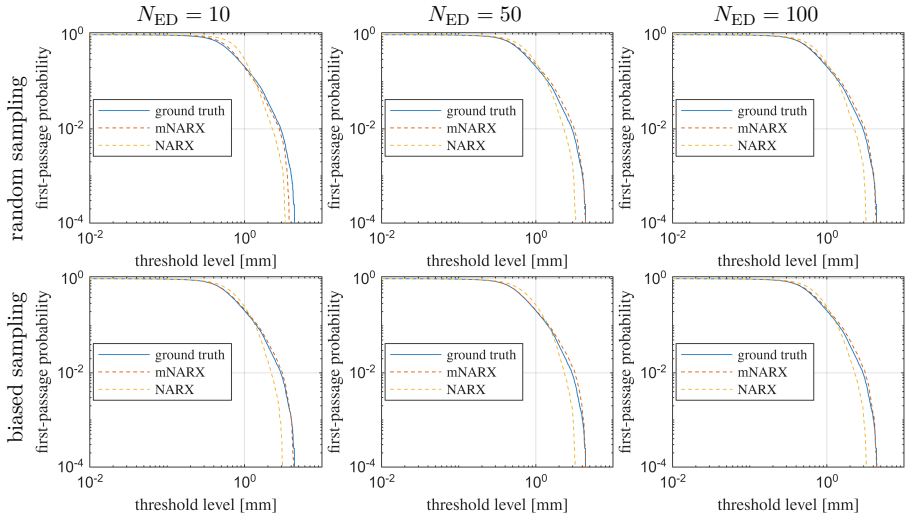
Time-variant reliability analysis is a critical task for ensuring the safety of engineering dynamical systems subjected to stochastic excitations. However, assessing failure probability for realistic systems with Monte-Carlo simulation-based methods is often computationally intractable due to the high cost of the underlying models and the large number of simulations required. While surrogate models such as polynomial chaos expansions or Kriging are well-established for time-invariant reliability problems, their direct application to time-dependent systems remains challenging. This chapter introduces two advanced surrogate modeling frameworks designed specifically for dynamical systems: manifold-NARX (mNARX) and functional NARX (F-NARX). The mNARX approach constructs the surrogate on a reduced-order manifold of auxiliary state variables, enabling the efficient handling of high-dimensional inputs by embedding physical insight into a regression formulation. Conversely, the F-NARX framework exploits the functional nature of system trajectories, extracting principal component features from continuous time windows to mitigate issues associated with discrete lag selection and long-memory effects. We demonstrate the efficacy of these methods on two benchmark reliability problems: a stochastic quarter-car model and a hysteretic Bouc-Wen oscillator. The results highlight that, when combined with suitably biased experimental designs, both frameworks accurately capture the tail behavior of the system response, enabling precise and efficient estimation of first-passage probabilities.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
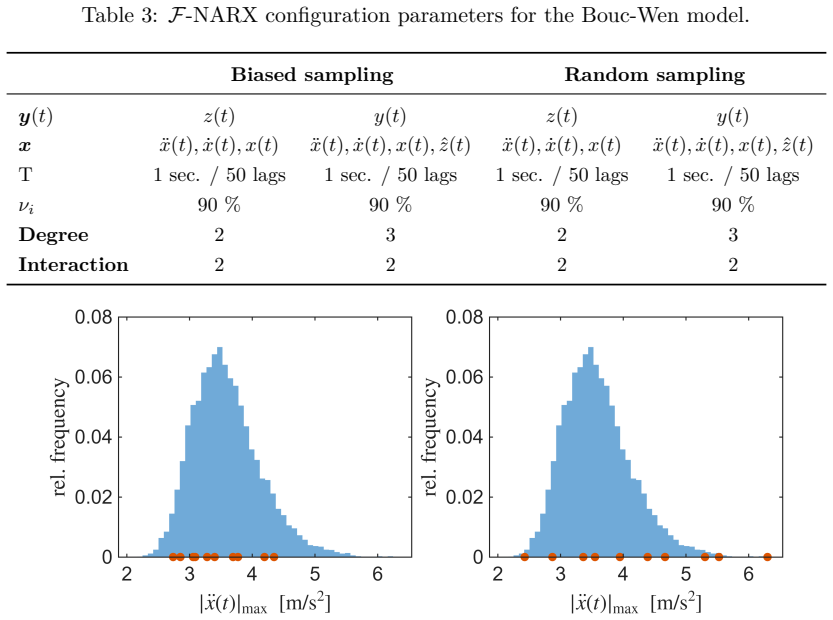
Summary. The manuscript introduces two surrogate modeling frameworks—manifold-NARX (mNARX) and functional NARX (F-NARX)—for time-variant reliability analysis of dynamical systems under stochastic excitation. mNARX embeds physical insight via a reduced-order manifold of auxiliary states, while F-NARX extracts principal-component features from time windows to handle long-memory effects. Both are combined with biased experimental designs and demonstrated on a stochastic quarter-car model and a hysteretic Bouc-Wen oscillator, with the central claim that they accurately capture tail behavior to enable precise, efficient first-passage probability estimation.
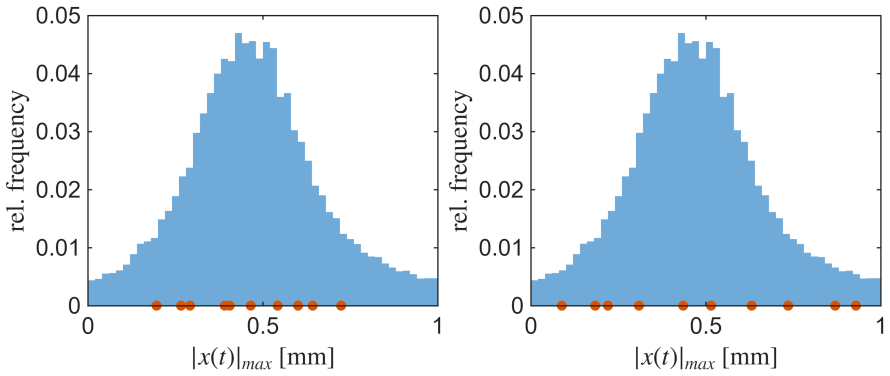
Significance. If the surrogates preserve tail statistics without systematic bias, the work would provide a valuable computational advance for engineering reliability problems where direct Monte Carlo is intractable. The emphasis on biased designs targeting extremes is a strength, but the absence of explicit tail-validation metrics leaves the efficiency gain unquantified relative to existing time-dependent surrogate approaches.
major comments (3)
- [Abstract] Abstract: the claim that the frameworks 'accurately capture the tail behavior' and enable 'precise' first-passage probability estimates is load-bearing yet unsupported by any reported quantitative error measures (e.g., relative error, confidence intervals, or convergence rates) against brute-force Monte Carlo on the benchmark tails; visual agreement alone does not establish preservation of rare-event statistics.
- [Introduction / Methods] The reduced-manifold construction in mNARX and the principal-component extraction in F-NARX are presented as sufficient to represent extreme responses, but no analysis is given showing that information relevant to rare crossings (high-frequency content or specific nonlinear interactions) is retained after dimensionality reduction; this directly affects whether the biased-training claim holds without bias in the failure probability.
- [Numerical Examples] Benchmark results: while two systems are shown, the manuscript supplies no table or figure reporting the estimated first-passage probabilities with error bars or direct comparison to reference Monte Carlo tails, undermining the assertion of 'precise' estimation.
minor comments (2)
- [Methods] Notation for the auxiliary states in mNARX and the time-window length in F-NARX should be defined explicitly at first use to avoid ambiguity in the regression formulation.
- [Experimental Design] The description of the biased experimental design lacks a precise statement of the biasing distribution or importance-sampling weights; this detail is needed for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below and will incorporate revisions to strengthen the quantitative support for our claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the frameworks 'accurately capture the tail behavior' and enable 'precise' first-passage probability estimates is load-bearing yet unsupported by any reported quantitative error measures (e.g., relative error, confidence intervals, or convergence rates) against brute-force Monte Carlo on the benchmark tails; visual agreement alone does not establish preservation of rare-event statistics.
Authors: We agree that the abstract claim requires stronger quantitative backing. In the revised manuscript we will add relative errors, confidence intervals from repeated surrogate runs, and convergence diagnostics for the first-passage probabilities, all benchmarked directly against brute-force Monte Carlo on the reported tails. revision: yes
-
Referee: [Introduction / Methods] The reduced-manifold construction in mNARX and the principal-component extraction in F-NARX are presented as sufficient to represent extreme responses, but no analysis is given showing that information relevant to rare crossings (high-frequency content or specific nonlinear interactions) is retained after dimensionality reduction; this directly affects whether the biased-training claim holds without bias in the failure probability.
Authors: The manifold and PCA constructions are chosen to retain the dominant dynamics that govern extreme excursions, as confirmed by the matching response distributions in the numerical examples. To address the concern explicitly, we will add a supplementary comparison of power spectra and extreme-value statistics between the full and reduced representations. revision: yes
-
Referee: [Numerical Examples] Benchmark results: while two systems are shown, the manuscript supplies no table or figure reporting the estimated first-passage probabilities with error bars or direct comparison to reference Monte Carlo tails, undermining the assertion of 'precise' estimation.
Authors: We accept that a direct quantitative table is necessary. The revised version will contain a new table (and updated figure) that lists the surrogate-based first-passage probability estimates together with error bars and side-by-side Monte Carlo reference values for both benchmark systems. revision: yes
Circularity Check
No circularity in surrogate construction or tail-probability estimation
full rationale
The paper defines mNARX via reduced-order manifold regression on auxiliary states and F-NARX via principal-component features extracted from time windows, then trains both on simulation data from the quarter-car and Bouc-Wen benchmarks. First-passage probabilities are subsequently estimated from the trained surrogates on independent test trajectories. This chain does not reduce any claimed prediction to the fitting inputs by construction, nor does it rely on self-citations, uniqueness theorems, or ansatzes imported from prior author work. The central performance claim therefore remains externally falsifiable against the true dynamical models.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The dynamical system trajectories lie on a low-dimensional manifold that can be identified from auxiliary state variables.
- domain assumption Principal component features extracted from time windows capture the relevant long-memory behavior for tail estimation.
Reference graph
Works this paper leans on
-
[1]
Billings, S. A. (2013). Nonlinear system identification: NARMAX methods in the time, frequency, and spatio-temporal domains . Chichester, West Sussex, United Kingdom: John Wiley & Sons, Inc
work page 2013
-
[2]
Blatman, G. and B. Sudret (2011). Principal component analysis and least angle regression in spectral stochastic finite element analysis. In Proc. 11th Int. Conf. on Applications of Stat. and Prob. in Civil Engineering (ICASP11), Zurich, Switzerland
work page 2011
-
[3]
Du, W., Y. Luo, and Y. Wang (2019). Time-variant reliability analysis using the parallel subset simulation. Reliability Engineering & System Safety\/ 182 , 250--257
work page 2019
-
[4]
Echard, B., N. Gayton, and M. Lemaire (2011). AK-MCS: An active learning reliability method combining Kriging and Monte Carlo Simulation . Structural Safety\/ 33\/ (2), 145--154
work page 2011
- [5]
-
[6]
Ghanem, R. and P. Spanos (2003). Stochastic F inite E lements: A S pectral A pproach\/ (2nd ed.). Courier D over P ublications, Mineola
work page 2003
-
[7]
Hu, Z. and X. Du (2015). First order reliability method for time-variant problems using series expansions. Structural and Multidisciplinary Optimization\/ 51\/ (1), 1--21
work page 2015
-
[8]
Hu, Z. and S. Mahadevan (2016). A single-loop kriging surrogate modeling for time-dependent reliability analysis. Journal of Mechanical Design\/ 138\/ (6), 061406
work page 2016
-
[9]
Jolliffe, I. T. (2002). Principal component analysis\/ (2 ed.). Springer Series in Statistics. New York: Springer Verlag (Second Edition)
work page 2002
-
[10]
Le Ma \^ i tre, O. P., L. Mathelin, O. M. Knio, and M. Y. Hussaini (2010). Asynchronous time integration for polynomial chaos expansion of uncertain periodic dynamics . Discrete and Continuous Dynamical Systems\/ 28\/ (1), 199--226
work page 2010
-
[11]
Li, J. and J. Chen (2004). Probability density evolution method for dynamic response analysis of structures with uncertain parameters. Computational Mechanics\/ 34\/ (5), 400--409
work page 2004
-
[12]
Mai, C.-V. (2016). Polynomial chaos expansions for uncertain dynamical systems. Applications in earthquake engineering . Ph.\ D. thesis, ETH Z \"u rich, Switzerland
work page 2016
-
[13]
Mai, C.-V., M. D. Spiridonakos, E. Chatzi, and B. Sudret (2016). Surrogate modeling for stochastic dynamical systems by combining nonlinear autoregressive with exogeneous input models and polynomial chaos expansions. International Journal of Uncertainty Quantification\/ 6\/ (4), 313--339
work page 2016
-
[14]
Mai, C. V. and B. Sudret (2017). Surrogate models for oscillatory systems using sparse polynomial chaos expansions and stochastic time warping. SIAM/ASA Journal on Uncertainty Quantification\/ 5\/ (1), 540--571
work page 2017
-
[15]
Marelli, S. and B. Sudret (2018). An active-learning algorithm that combines sparse polynomial chaos expansions and bootstrap for structural reliability analysis. Structural Safety\/ 75 , 67--74
work page 2018
-
[16]
Moustapha, M., S. Marelli, and B. Sudret (2022). Active learning for structural reliability: S urvey, general framework and benchmark. Structural Safety\/ 96 , 102174
work page 2022
-
[17]
Rao, K. R. and P. Yip (1990). Discrete Cosine Transform: Algorithms, Advantages, Applications . Boston: Academic Press
work page 1990
-
[18]
Rezaeian, S. and A. Der Kiureghian (2010). Simulation of synthetic ground motions for specified earthquake and site characteristics . Earthquake Engineering & Structural Dynamics\/ 39\/ (10), 1155--1180
work page 2010
-
[19]
Santner, T. J., B. J. Williams, and W. I. Notz (2003). The D esign and A nalysis of C omputer E xperiments . Springer, New York
work page 2003
-
[20]
Sch\"ar, S., S. Marelli, and B. Sudret (2024). Emulating the dynamics of complex systems using autoregressive models on manifolds (mNARX) . Mechanical Systems and Signal Processing\/ 208 , 110956
work page 2024
-
[21]
Sch \"a r, S., S. Marelli, and B. Sudret (2025). Surrogate modeling with functional nonlinear autoregressive models ( F -NARX) . Reliability Engineering & System Safety\/ , 111276
work page 2025
-
[22]
Sch \"a r, S., S. Marelli, and B. Sudret (2026). mNARX+: A surrogate model for complex dynamical systems using manifold-NARX and automatic feature selection . Computer Methods in Applied Mechanics and Engineering\/ 449 , 118550
work page 2026
- [23]
-
[24]
Tibshirani, R. (1996). Regression shrinkage and selection via the lasso. Journal of the Royal Statistical Society. Series B (Methodological)\/ 58\/ (1), 267--288
work page 1996
-
[25]
Wang, J., R. Cao, and Z. Sun (2021). Importance sampling for time-variant reliability analysis. IEEE Access\/ 9 , 20933--20941
work page 2021
-
[26]
Wu, H. and X. Du (2022, 04). Envelope method for time- and space-dependent reliability prediction. ASCE-ASME Journal of Risk and Uncertainty in Engineering Systems Part B: Mechanical Engineering\/ 8\/ (4), 041201
work page 2022
-
[27]
Xiu, D. and G. E. Karniadakis (2002, January). The Wiener-Askey polynomial chaos for stochastic differential equations . SIAM Journal on Scientific Computing\/ 24\/ (2), 619--644
work page 2002
-
[28]
Zhang, D., X. Han, C. Jiang, J. Liu, and Q. Li (2017). Time-dependent reliability analysis through response surface method. Journal of Mechanical Design\/ 139\/ (4), 041404
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.