Recognition: unknown
Bounded-Input True Proportional Navigation for Impact-Time Control
Pith reviewed 2026-05-14 17:50 UTC · model grok-4.3
The pith
A sliding-mode guidance law based on true proportional navigation intercepts constant-velocity targets at a prescribed time while respecting known acceleration bounds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that an effective guidance law derived via the sliding mode control technique from the true proportional-navigation baseline can achieve time-constrained interception while explicitly accounting for bounded control input, without needing the linearization steps common in prior impact-time guidance methods.
What carries the argument
Sliding mode control applied to the true proportional-navigation (TPNG) law with interceptor acceleration treated as a bounded first-order dynamic variable.
If this is right
- The law enables interception at an exact prescribed time without actuator saturation for constant-velocity targets.
- Exact time-to-go formulation extends applicability beyond small-angle or linearized engagement geometries.
- Explicit incorporation of input bounds into the sliding-mode design prevents command saturation during the engagement.
- Simulation results across varied scenarios demonstrate that both timing and bounded-input objectives are met simultaneously.
Where Pith is reading between the lines
- The approach could serve as a baseline for extensions that add online estimation of target velocity to handle mild maneuvers.
- Because the bound is enforced inside the control law, the method may reduce the need for post-design saturation handling in missile autopilots.
- The exact time-to-go expression suggests possible use in cooperative guidance where multiple interceptors must arrive with synchronized timing.
Load-bearing premise
The target moves at constant velocity with no maneuvers and the interceptor acceleration bound is known in advance.
What would settle it
A high-fidelity simulation or flight test in which the target executes an unanticipated maneuver and the interceptor either misses the commanded impact time or violates the acceleration bound.
Figures



read the original abstract
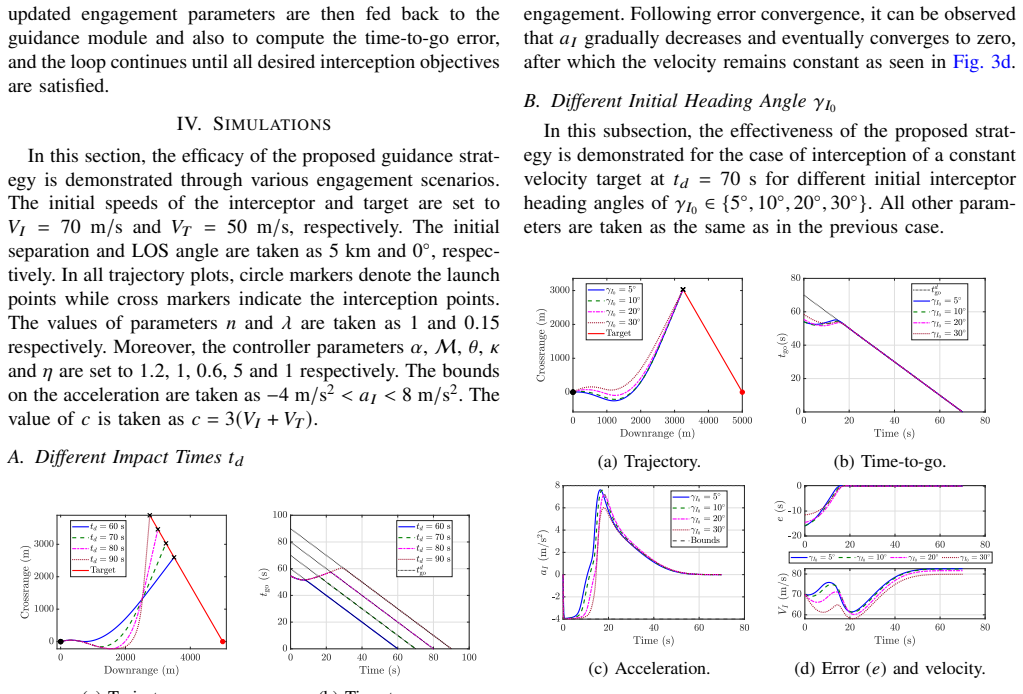
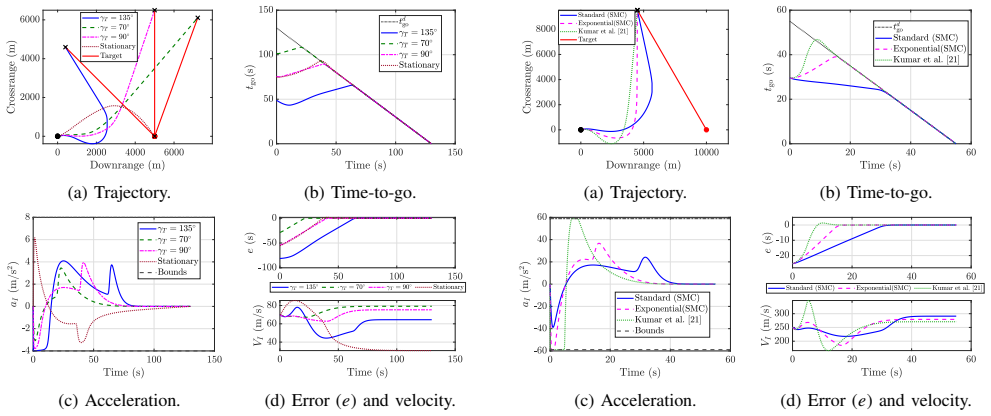
This paper proposes a nonlinear guidance strategy capable of intercepting a constant-velocity, non-maneuvering target while strictly satisfying the prescribed bounds on the control input (commanded acceleration). Unlike conventional strategies that estimate time-to-go using linearization or small-angle approximations, the proposed strategy employs true proportional-navigation guidance (TPNG) as a baseline, which utilizes an exact time-to-go formulation and is applicable over a wide range of target motions. In contrast to most existing strategies, which do not incorporate control input bounds into the guidance design, the proposed approach explicitly accounts for these limits by modeling the interceptor acceleration as a dynamic variable. Based on the sliding mode control technique, an effective guidance law that achieves time-constrained interception while accounting for bounded input is then derived. The performance of the proposed strategy is evaluated for various engagement scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a nonlinear guidance law that combines true proportional navigation (TPNG) with sliding-mode control (SMC) to achieve exact impact-time control against a constant-velocity, non-maneuvering target while enforcing known bounds on the interceptor's commanded acceleration, which is modeled as a first-order dynamic state.
Significance. If the central claim holds, the work would supply a guidance design that directly incorporates actuator limits into the sliding-surface construction rather than relying on post-hoc saturation or linear approximations, potentially improving robustness for time-constrained intercepts under realistic acceleration constraints. The use of an exact (non-linearized) time-to-go expression is a positive technical feature.
major comments (2)
- [§3] §3 (SMC guidance-law derivation): the manuscript asserts that the derived law 'strictly satisfies' the known acceleration bounds for all feasible impact times, yet provides no invariant-set, barrier-function, or Lyapunov-based argument showing that the first-order acceleration state remains inside its bound during the SMC reaching phase. Standard first-order reaching dynamics can produce transient overshoot even after the lag filter; without an explicit proof that the bound is never violated from arbitrary initial conditions, the 'strictly satisfying' guarantee is unverified.
- [§4] §4 (simulation results): the reported engagement scenarios all begin from initial conditions that already place the acceleration state well inside the bound and use modest impact-time errors; no Monte-Carlo trials or worst-case initial-condition sweeps are shown that would stress the transient bound-invariance claim. This leaves the practical validity of the bound guarantee dependent on untested regimes.
minor comments (2)
- [§2] Notation for the first-order acceleration time constant and the bound value should be introduced once in §2 and used consistently thereafter; current usage mixes a and a_max without a clear table of symbols.
- [Figure 3] Figure 3 caption states 'acceleration profile' but the y-axis label is missing units; add consistent units (e.g., m/s²) to all acceleration plots.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help improve the rigor of the bound-invariance claim. We address each major point below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [§3] §3 (SMC guidance-law derivation): the manuscript asserts that the derived law 'strictly satisfies' the known acceleration bounds for all feasible impact times, yet provides no invariant-set, barrier-function, or Lyapunov-based argument showing that the first-order acceleration state remains inside its bound during the SMC reaching phase. Standard first-order reaching dynamics can produce transient overshoot even after the lag filter; without an explicit proof that the bound is never violated from arbitrary initial conditions, the 'strictly satisfying' guarantee is unverified.
Authors: We acknowledge that the manuscript does not contain an explicit invariant-set or Lyapunov argument proving bound invariance throughout the reaching phase from arbitrary initial conditions. The sliding-surface design ensures the bound is respected at equilibrium, but transient overshoot under the first-order actuator dynamics was not formally ruled out. In the revision we will add a barrier-function or Lyapunov analysis (using the acceleration error as a candidate) to prove that the commanded acceleration remains strictly inside the prescribed limits during the entire reaching phase for all feasible impact times. revision: yes
-
Referee: [§4] §4 (simulation results): the reported engagement scenarios all begin from initial conditions that already place the acceleration state well inside the bound and use modest impact-time errors; no Monte-Carlo trials or worst-case initial-condition sweeps are shown that would stress the transient bound-invariance claim. This leaves the practical validity of the bound guarantee dependent on untested regimes.
Authors: We agree that the existing simulations start from benign initial conditions and do not stress worst-case transients. The revised manuscript will include Monte-Carlo trials (at least 500 runs) over randomized initial conditions that deliberately place the acceleration state near or at the bound at t=0, together with worst-case impact-time errors, to numerically confirm that the bound is never violated during the reaching phase. revision: yes
Circularity Check
No significant circularity; derivation rests on standard SMC existence conditions and exact TPNG time-to-go
full rationale
The paper derives a bounded-input guidance law by augmenting true proportional navigation (TPNG) with sliding-mode control on a first-order acceleration state. No equation reduces the claimed impact-time performance to a fitted parameter or self-referential definition. The time-to-go expression is taken from the exact TPNG formulation (standard in the literature) rather than being redefined inside the paper. Self-citations, if present, are not load-bearing for the central existence or boundedness claim. The design therefore remains self-contained against external benchmarks and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
free parameters (1)
- sliding-mode gains
axioms (2)
- standard math Existence of sliding mode on the chosen surface
- domain assumption Target velocity is constant and known
Reference graph
Works this paper leans on
-
[1]
Impact angle guidance using state-dependent (differential) riccati equation: Unified applicability analysis,
L.-G. Lin and M. Xin, “Impact angle guidance using state-dependent (differential) riccati equation: Unified applicability analysis,”Journal of Guidance, Control, and Dynamics, vol. 43, no. 11, pp. 2175–2182, 2020
2020
-
[2]
Finite-horizon robust suboptimal control- based impact angle guidance,
S. R. Kumar and A. Maity, “Finite-horizon robust suboptimal control- based impact angle guidance,”IEEE Transactions on Aerospace and Electronic Systems, vol. 56, no. 3, pp. 1955–1965, 2019
1955
-
[3]
Impact-time-control guidance law for anti-ship missiles,
I.-S. Jeon, J.-I. Lee, and M.-J. Tahk, “Impact-time-control guidance law for anti-ship missiles,”IEEE Transactions on control systems technology, vol. 14, no. 2, pp. 260–266, 2006
2006
-
[4]
Impact-time-control guidance with generalized proportional navigation based on nonlinear formulation,
——, “Impact-time-control guidance with generalized proportional navigation based on nonlinear formulation,”Journal of Guidance, Control, and Dynamics, vol. 39, no. 8, pp. 1885–1890, 2016
2016
-
[5]
Distributed guidance law design for cooperative simultaneous attacks with multiple missiles,
J. Zhou and J. Yang, “Distributed guidance law design for cooperative simultaneous attacks with multiple missiles,”Journal of Guidance, Control, and Dynamics, vol. 39, no. 10, pp. 2439–2447, 2016
2016
-
[6]
Modified pure proportional navigation guidance law for impact time control,
N. Cho and Y . Kim, “Modified pure proportional navigation guidance law for impact time control,”Journal of Guidance, Control, and Dynamics, vol. 39, no. 4, pp. 852–872, 2016
2016
-
[7]
Polynomial shaping of the look angle for impact-time control,
R. Tekin, K. S. Erer, and F. Holzapfel, “Polynomial shaping of the look angle for impact-time control,”Journal of Guidance, Control, and Dynamics, vol. 40, no. 10, pp. 2668–2673, 2017
2017
-
[8]
Adaptive impact time control via look-angle shaping un- der varying velocity,
——, “Adaptive impact time control via look-angle shaping un- der varying velocity,”Journal of Guidance, Control, and Dynamics, vol. 40, no. 12, pp. 3247–3255, 2017
2017
-
[9]
Impact time control with generalized-polynomial range formu- lation,
——, “Impact time control with generalized-polynomial range formu- lation,”Journal of Guidance, Control, and Dynamics, vol. 41, no. 5, pp. 1190–1195, 2018
2018
-
[10]
New approach to guidance law design,
R. T. Yanushevsky and W. J. Boord, “New approach to guidance law design,”Journal of Guidance, Control, and Dynamics, vol. 28, no. 1, pp. 162–166, 2005
2005
-
[11]
Lyapunov-based impact time control guidance laws against stationary targets,
M. Kim, B. Jung, B. Han, S. Lee, and Y . Kim, “Lyapunov-based impact time control guidance laws against stationary targets,”IEEE Transactions on Aerospace and Electronic Systems, vol. 51, no. 2, pp. 1111–1122, 2015
2015
-
[12]
Lyapunov-based guidance law for impact time control and simultaneous arrival,
A. Saleem and A. Ratnoo, “Lyapunov-based guidance law for impact time control and simultaneous arrival,”Journal of Guidance, Control, and Dynamics, vol. 39, no. 1, pp. 164–173, 2016
2016
-
[13]
Impact time guidance for large heading errors using sliding mode control,
S. R. Kumar and D. Ghose, “Impact time guidance for large heading errors using sliding mode control,”IEEE Transactions on Aerospace and Electronic Systems, vol. 51, no. 4, pp. 3123–3138, 2016
2016
-
[14]
Nonsingular sliding mode guidance for impact time control,
D. Cho, H. J. Kim, and M.-J. Tahk, “Nonsingular sliding mode guidance for impact time control,”Journal of Guidance, Control, and Dynamics, vol. 39, no. 1, pp. 61–68, 2016
2016
-
[15]
Sliding-mode impact time guidance law design for various target motions,
Q. Hu, T. Han, and M. Xin, “Sliding-mode impact time guidance law design for various target motions,”Journal of Guidance, Control, and Dynamics, vol. 42, no. 1, pp. 136–148, 2019
2019
-
[16]
Super-twisting control based impact time constrained guidance,
A. Sinha and S. R. Kumar, “Super-twisting control based impact time constrained guidance,” inAIAA Scitech 2020 Forum, 2020, p. 0610
2020
-
[17]
Three-dimensional nonlinear impact time guidance using predicted interception point,
A. Sinha, R. V . Nanavati, and S. Ranjan Kumar, “Three-dimensional nonlinear impact time guidance using predicted interception point,” Journal of Guidance, Control, and Dynamics, vol. 46, no. 3, pp. 608– 617, 2023
2023
-
[18]
Control of impact time with increased robustness via feedback linearization,
R. Tekin, K. S. Erer, and F. Holzapfel, “Control of impact time with increased robustness via feedback linearization,”Journal of Guidance, Control, and Dynamics, vol. 39, no. 7, pp. 1682–1689, 2016
2016
-
[19]
Deviated pursuit based interception at a priori fixed time,
S. R. Kumar and D. Mukherjee, “Deviated pursuit based interception at a priori fixed time,”Journal of Guidance, Control, and Dynamics, vol. 42, no. 9, pp. 2124–2131, 2019
2019
-
[20]
Impact time constrained integrated guidance and control design,
A. Sinha, S. R. Kumar, and D. Mukherjee, “Impact time constrained integrated guidance and control design,”Aerospace Science and Tech- nology, vol. 115, p. 106824, 2021
2021
-
[21]
Nonsingular impact time guidance and control using deviated pursuit,
——, “Nonsingular impact time guidance and control using deviated pursuit,”Aerospace Science and Technology, vol. 115, p. 106776, 2021
2021
-
[22]
True-proportional-navigation in- spired finite-time homing guidance for time constrained interception,
S. R. Kumar and D. Mukherjee, “True-proportional-navigation in- spired finite-time homing guidance for time constrained interception,” Aerospace Science and Technology, vol. 123, p. 107499, 2022
2022
-
[23]
Time-critical unified rendezvous guid- ance for an unmanned autonomous vehicle,
A. Sinha and S. R. Kumar, “Time-critical unified rendezvous guid- ance for an unmanned autonomous vehicle,”Journal of Autonomous Vehicles and Systems, vol. 4, no. 3, p. 031001, 2024
2024
-
[24]
Guidance laws against towed decoy based on adaptive back-stepping sliding mode and anti- saturation methods,
J.-P. Dong, J.-G. Sun, Y . Guo, and S.-M. Song, “Guidance laws against towed decoy based on adaptive back-stepping sliding mode and anti- saturation methods,”International Journal of Control, Automation and Systems, vol. 16, no. 4, pp. 1724–1735, 2018
2018
-
[25]
True-proportional- navigation based time constrained guidance of unmanned surface vessel,
R. M. K. Verma, S. R. Kumar, and H. Arya, “True-proportional- navigation based time constrained guidance of unmanned surface vessel,” in2025 American Control Conference (ACC). IEEE, 2025, pp. 874–879
2025
-
[26]
Provably safe control for constrained nonlinear systems with bounded input,
S. Kumar, S. R. Kumar, and A. Sinha, “Provably safe control for constrained nonlinear systems with bounded input,”arXiv preprint arXiv:2504.11592, 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.