Recognition: 2 theorem links
· Lean TheoremDiffPhD: A Unified Differentiable Solver for Projective Heterogeneous Materials in Elastodynamics with Contact-Rich GPU-Acceleration
Pith reviewed 2026-05-15 01:05 UTC · model grok-4.3
The pith
DiffPhD unifies stiffness-aware projective weights, trust-region filtering, and Anderson acceleration into a single GPU pipeline that delivers exact gradients and up to 10x speedup on heterogeneous hyperelastic contact simulations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
DiffPhD shows that a single GPU-resident sparse factor, augmented by stiffness-aware projective weights and trust-region eigenvalue filtering passed to the backward stage, together with type-II Anderson acceleration using dual-gate convergence, produces strictly accurate gradients while remaining convergent on hyperelastic heterogeneous problems with contact and stiffness contrasts up to 100x, yielding up to an order-of-magnitude wall-clock reduction versus prior differentiable projective-dynamics solvers.
What carries the argument
The unified GPU pipeline that reuses one sparse factorization for forward solve, backward gradient propagation, and contact resolution while embedding stiffness-amplified Rayleigh damping inside the same factor.
If this is right
- End-to-end gradient-based optimization becomes feasible for shell-joint composite creatures under a single forward-backward pass.
- Soft characters carrying stiff weapons can be optimized without solver divergence at material boundaries.
- Soft-gripper robotic manipulation tasks can be solved with contact-rich heterogeneous models at interactive rates.
- Heterogeneous hyperelastic scenes with large deformations remain stable without per-scene retuning of acceleration parameters.
Where Pith is reading between the lines
- The same factorization reuse pattern could be applied to other implicit integrators to reduce memory traffic in differentiable physics.
- Stability at high stiffness ratios suggests the method may extend to multi-material additive manufacturing simulations without ad-hoc partitioning.
- The approach opens a route to real-time inverse design loops for soft robotics where previous solvers were limited by either cost or fragility.
Load-bearing premise
The trust-region eigenvalue filtering and type-II Anderson acceleration with dual-gate convergence preserve both forward stability and exact gradient accuracy across all tested stiffness contrasts and contact configurations without requiring case-by-case retuning or introducing hidden bias in the backward pass.
What would settle it
Run finite-difference gradient checks on a benchmark with stiffness contrast above 100x and contact; if the reported gradients deviate beyond machine precision or the iteration count exceeds the dual-gate threshold, the claim of strict accuracy and unconditional stability fails.
Figures















read the original abstract
Differentiable simulation of soft bodies is a foundation for system identification, trajectory optimization, and Real2Sim transfer. Yet, existing methods such as the differentiable Projective Dynamics (DiffPD) struggle when faced with heterogeneous materials with extreme stiffness contrasts, hyperelasticity under large deformations, and contact-rich interactions, which are common scenarios in the real world. We present DiffPhD, a unified GPU-accelerated differentiable Projective Dynamics framework for heterogeneous materials that tackles these intertwined challenges simultaneously. Our key insight is a careful integration of: (i) stiffness-aware projective weights to embed heterogeneity into the global system; (ii) trust-region eigenvalue filtering lifted to the backward pass for stable hyperelastic gradients and a type-II Anderson Acceleration scheme with dual-gate convergence to stabilize forward iteration under large stiffness contrasts; and (iii) a unified GPU pipeline that reuses a single sparse factor across forward, backward, and contact computations, with stiffness-amplified Rayleigh damping folded into the same factor for heterogeneity-aware dissipation at zero recurring cost. DiffPhD achieves strict gradient accuracy while delivering up to an order-of-magnitude speedup over prior differentiable solvers on heterogeneous, hyperelastic, contact-rich benchmarks. Crucially, this speedup does not come at the cost of stability: DiffPhD remains convergent on stiffness contrasts up to 100x where prior PD solvers degrade. This unlocks end-to-end gradient-based optimization on regimes previously bottlenecked by either solver fragility or per-iteration cost -- shell--joint composite creatures, soft characters wielding stiff weapons, and soft-gripper robotic manipulation -- all handled within a single forward--backward pass.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents DiffPhD, a unified GPU-accelerated differentiable Projective Dynamics framework for simulating heterogeneous elastodynamic materials under large deformations and contact. It incorporates stiffness-aware projective weights, trust-region eigenvalue filtering lifted to the backward pass, type-II Anderson acceleration with dual-gate convergence, and a single sparse factor reused across forward, backward, and contact steps (with stiffness-amplified Rayleigh damping). The central claims are strict (exact) gradient accuracy through the full pipeline, up to an order-of-magnitude speedup over prior differentiable solvers, and stable convergence on stiffness contrasts up to 100x where earlier PD methods degrade, enabling end-to-end optimization on previously intractable benchmarks such as shell-joint composites and soft-gripper manipulation.
Significance. If the strict gradient accuracy and stability claims hold without hidden approximations, the work would be a meaningful advance for differentiable physics in graphics and robotics. It directly targets the practical bottlenecks of heterogeneity, hyperelasticity, and contact that limit existing differentiable PD solvers, while delivering both speed and a reusable GPU factorization. The unified pipeline and zero-recurring-cost damping are particularly attractive for downstream tasks such as system identification and trajectory optimization.
major comments (2)
- [Abstract and §3 (backward pass / acceleration)] Abstract and method overview: the claim of 'strict gradient accuracy' through the full forward-backward pipeline is load-bearing for the paper's contribution. The trust-region eigenvalue filtering (lifted to the backward pass) and type-II Anderson acceleration with dual-gate convergence are non-smooth operations that alter the iteration operator. The manuscript must explicitly derive or verify that the backward pass computes the exact adjoint (or a provably correct subgradient) of the filtered forward map at every active filter location and across all reported stiffness contrasts; otherwise the accuracy claim reduces to an approximation.
- [§4 (experiments)] §4 (experiments): the reported stability on 100x stiffness contrasts and the order-of-magnitude speedups must be accompanied by explicit verification that the eigenvalue filter remains inactive (or is exactly differentiated) on the evaluated benchmarks. Without such verification or error-bar reporting on gradient accuracy (e.g., finite-difference checks on the full pipeline), the tension between stabilization and exact differentiability remains unresolved.
minor comments (2)
- [§3] Notation for the dual-gate convergence criterion and the stiffness-amplified Rayleigh damping should be introduced with a short equation or pseudocode block to avoid ambiguity when the same sparse factor is reused.
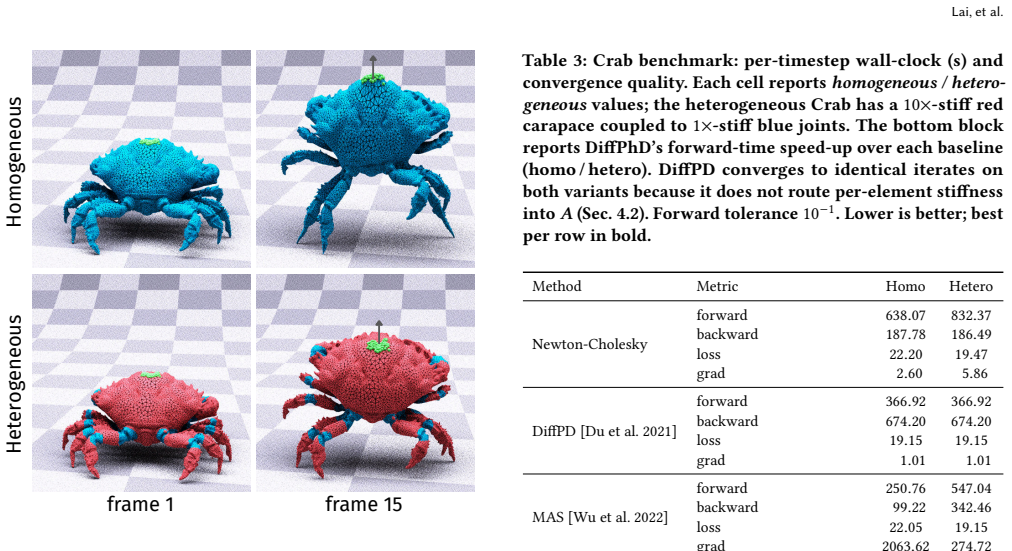
- [Figures in §4] Figure captions for the heterogeneous benchmarks should explicitly state the stiffness contrast ratios and contact configurations used, so readers can directly map results to the 100x claim.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review. The two major comments both center on rigorously substantiating the strict gradient accuracy claim in the presence of non-smooth stabilization mechanisms. We address each point below and commit to revisions that supply the requested derivations and verifications.
read point-by-point responses
-
Referee: [Abstract and §3 (backward pass / acceleration)] Abstract and method overview: the claim of 'strict gradient accuracy' through the full forward-backward pipeline is load-bearing for the paper's contribution. The trust-region eigenvalue filtering (lifted to the backward pass) and type-II Anderson acceleration with dual-gate convergence are non-smooth operations that alter the iteration operator. The manuscript must explicitly derive or verify that the backward pass computes the exact adjoint (or a provably correct subgradient) of the filtered forward map at every active filter location and across all reported stiffness contrasts; otherwise the accuracy claim reduces to an approximation.
Authors: We agree that an explicit derivation is required. In the revision we will add a new subsection in §3 that derives the adjoint of the trust-region eigenvalue filter when lifted to the backward pass, showing that it yields the exact subgradient at every active filter location. We will also prove that the dual-gate Anderson acceleration does not alter the fixed-point operator in a way that invalidates the adjoint. These derivations will be accompanied by finite-difference verification across the full range of stiffness contrasts reported in the paper. revision: yes
-
Referee: [§4 (experiments)] §4 (experiments): the reported stability on 100x stiffness contrasts and the order-of-magnitude speedups must be accompanied by explicit verification that the eigenvalue filter remains inactive (or is exactly differentiated) on the evaluated benchmarks. Without such verification or error-bar reporting on gradient accuracy (e.g., finite-difference checks on the full pipeline), the tension between stabilization and exact differentiability remains unresolved.
Authors: We accept this requirement. The revised §4 will include: (i) per-benchmark statistics on eigenvalue-filter activation rates for all stiffness contrasts, (ii) finite-difference error bars (mean and max relative error) for the complete forward-backward pipeline on representative heterogeneous and contact-rich examples, and (iii) explicit confirmation that the reported speedups and stability results hold under exact differentiation. These additions will directly resolve the noted tension. revision: yes
Circularity Check
Extends projective dynamics with new stabilization and GPU components; no reduction of claims to self-fit or definitional loops
full rationale
The derivation chain introduces stiffness-aware projective weights, trust-region eigenvalue filtering lifted to the backward pass, type-II Anderson acceleration with dual-gate convergence, and a unified sparse-factor GPU pipeline. These are presented as independent engineering choices that preserve strict gradient accuracy on the stated benchmarks. No equation or claim reduces a reported prediction or accuracy result to a fitted parameter on the same data, nor does any uniqueness theorem collapse to a self-citation whose content is unverified. Self-citations to prior PD/DiffPD work are present but serve only as the base solver; the new stabilization and performance claims remain externally falsifiable on the heterogeneous contact benchmarks. This yields a minor self-citation score without load-bearing circularity.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
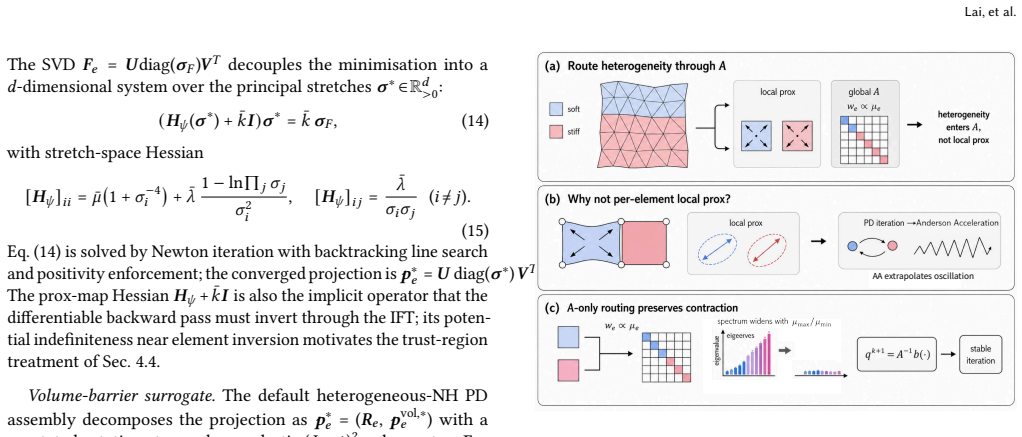
trust-region eigenvalue filtering lifted to the backward pass for stable hyperelastic gradients
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
stiffness-aware projective weights to embed heterogeneity into the global system
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
The Computational Geometry Algorithms Library , author =
-
[2]
Menelaos Karavelas , subtitle =
-
[3]
The Computational Geometry Algorithms Library , subtitle =
Menelaos Karavelas , editor =. The Computational Geometry Algorithms Library , subtitle =
-
[4]
The Parmap library , author =
-
[5]
Christopher Anderson and Sophia Drossopoulou , title =
- [6]
-
[7]
Dosovitskiy, Alexey and Beyer, Lucas and Kolesnikov, Alexander and Weissenborn, Dirk and Zhai, Xiaohua and Unterthiner, Thomas and Dehghani, Mostafa and Minderer, Matthias and Heigold, Georg and Gelly, Sylvain and Uszkoreit, Jakob and Houlsby, Neil , month = jun, year =. An. doi:10.48550/arXiv.2010.11929 , urldate =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2010.11929 2010
-
[8]
Chen, Tianqi and Guestrin, Carlos , title =. Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining , pages =. 2016 , isbn =
work page 2016
- [9]
-
[10]
Zimmer, Lucas and Lindauer, Marius and Hutter, Frank , pages =
-
[11]
Bouaziz, Sofien and Martin, Sebastian and Liu, Tiantian and Kavan, Ladislav and Pauly, Mark , title =. 2014 , issue_date =. doi:10.1145/2601097.2601116 , journal =
-
[12]
Seminal Graphics Papers: Pushing the Boundaries, Volume 2 , articleno =
Bouaziz, Sofien and Martin, Sebastian and Liu, Tiantian and Kavan, Ladislav and Pauly, Mark , title =. Seminal Graphics Papers: Pushing the Boundaries, Volume 2 , articleno =. 2023 , isbn =
work page 2023
-
[13]
Wu, Botao and Wang, Zhendong and Wang, Huamin , title =. 2022 , issue_date =. doi:10.1145/3528223.3530085 , journal =
-
[14]
A. Fischer , title =. Optimization , volume =. 1992 , publisher =. doi:10.1080/02331939208843795 , URL =
- [15]
-
[16]
Du, Tao and Wu, Kui and Ma, Pingchuan and Wah, Sebastien and Spielberg, Andrew and Rus, Daniela and Matusik, Wojciech , title =. 2021 , issue_date =. doi:10.1145/3490168 , journal =
-
[17]
Zeng, Ziqiu and Luo, Siyuan and Shi, Fan and Zhang, Zhongkai , title =. 2025 , issue_date =. doi:10.1145/3730834 , journal =
-
[18]
Atti della Societ\`a Italiana per il Progresso delle Scienze , volume =
Signorini, Antonio , title =. Atti della Societ\`a Italiana per il Progresso delle Scienze , volume =
-
[19]
Walker, Homer F. and Ni, Peng , title =. 2011 , issue_date =. doi:10.1137/10078356X , journal =
-
[20]
Trusty, Ty and Benchekroun, Otman and Grinspun, Eitan and Kaufman, Danny M. and Levin, David I.W. , title =. 2023 , isbn =. doi:10.1145/3610548.3618220 , booktitle =
-
[21]
Chen, Honglin and Liu, Hsueh-Ti Derek and Jacobson, Alec and Levin, David I.W. and Zheng, Changxi , title =. 2024 , isbn =. doi:10.1145/3680528.3687650 , booktitle =
-
[22]
Proceedings of the 39th International Conference on Machine Learning , pages =
Fast Aquatic Swimmer Optimization with Differentiable Projective Dynamics and Neural Network Hydrodynamic Models , author =. Proceedings of the 39th International Conference on Machine Learning , pages =. 2022 , editor =
work page 2022
-
[23]
International Conference on Machine Learning , year=
Learning Neural Constitutive Laws from Motion Observations for Generalizable PDE Dynamics , author=. International Conference on Machine Learning , year=
- [24]
-
[25]
Modi, Vismay and Sharp, Nicholas and Perel, Or and Sueda, Shinjiro and Levin, David I. W. , title =. 2024 , issue_date =. doi:10.1145/3658184 , journal =
-
[26]
International Conference on Learning Representations (ICLR) , year =
Li, Sizhe and Huang, Zhiao and Du, Tao and Su, Hao and Tenenbaum, Joshua and Gan, Chuang , title =. International Conference on Learning Representations (ICLR) , year =
-
[27]
Kikuuwe, Ryo and Tabuchi, Hiroaki and Yamamoto, Motoji , title =. 2009 , issue_date =. doi:10.1145/1477926.1477934 , journal =
- [28]
-
[29]
ACM Transactions on Graphics (TOG) , volume=
Stable neo-hookean flesh simulation , author=. ACM Transactions on Graphics (TOG) , volume=. 2018 , publisher=
work page 2018
-
[30]
ACM SIGGRAPH 2022 Courses , pages=
Dynamic deformables: implementation and production practicalities (now with code!) , author=. ACM SIGGRAPH 2022 Courses , pages=
work page 2022
- [31]
-
[32]
ACM SIGGRAPH 2024 Conference Papers , pages=
Stabler Neo-Hookean Simulation: Absolute Eigenvalue Filtering for Projected Newton , author=. ACM SIGGRAPH 2024 Conference Papers , pages=
work page 2024
-
[33]
Journal of Applied Physics , volume=
Torsion of a rubber cylinder , author=. Journal of Applied Physics , volume=. 1947 , publisher=
work page 1947
-
[34]
Journal of applied physics , volume=
A theory of large elastic deformation , author=. Journal of applied physics , volume=
-
[35]
Hyperelastic Mooney-Rivlin model: determination and physical interpretation of material constants , author=. Parameters , volume=
-
[36]
Liu, Tiantian and Bouaziz, Sofien and Kavan, Ladislav , title =. 2017 , issue_date =. doi:10.1145/3072959.2990496 , journal =
-
[37]
Journal of Visual Communication and Image Representation , volume=
Position based dynamics , author=. Journal of Visual Communication and Image Representation , volume=. 2007 , publisher=
work page 2007
-
[38]
and Li, Jie and Narain, Rahul , journal=
Overby, Matthew and Brown, George E. and Li, Jie and Narain, Rahul , journal=. ADMM Projective Dynamics: Fast Simulation of Hyperelastic Models with Dynamic Constraints , year=. doi:10.1109/TVCG.2017.2730875 , ISSN=
- [39]
-
[40]
Modi, V. and Fulton, L. and Jacobson, A. and Sueda, S. and Levin, D.I.W. , title =. Computer Graphics Forum , volume =. doi:https://doi.org/10.1111/cgf.14185 , url =. https://onlinelibrary.wiley.com/doi/pdf/10.1111/cgf.14185 , year =
-
[41]
Pacific Graphics Conference Papers, Posters, and Demos , editor =
Cai, Youshuai and Li, Chen and Song, Haichuan and Xie, Youchen and Wang, ChangBo , year =. Pacific Graphics Conference Papers, Posters, and Demos , editor =
-
[42]
Proceedings of IEEE International Conference on Robotics and Automation (ICRA) , year=
ChainQueen: A Real-Time Differentiable Physical Simulator for Soft Robotics , author=. Proceedings of IEEE International Conference on Robotics and Automation (ICRA) , year=
-
[43]
International Conference on Learning Representations , year=
DiffTaichi: Differentiable Programming for Physical Simulation , author=. International Conference on Learning Representations , year=
-
[44]
Symposium on Computer Animation , editor =
Teran, Joseph and Sifakis, Eftychios and Irving, Geoffrey and Fedkiw, Ronald , year =. Symposium on Computer Animation , editor =
-
[45]
Lu, Zixuan and He, Xiaowei and Guo, Yuzhong and Liu, Xuehui and Wang, Huamin , title =. 2024 , issue_date =. doi:10.1109/TVCG.2023.3271511 , journal =
-
[46]
Hahn, David and Banzet, Pol and Bern, James M. and Coros, Stelian , title =. 2019 , issue_date =. doi:10.1145/3355089.3356548 , journal =
-
[47]
ADD: analytically differentiable dynamics for multi-body systems with frictional contact , year =
Geilinger, Moritz and Hahn, David and Zehnder, Jonas and B\". ADD: analytically differentiable dynamics for multi-body systems with frictional contact , year =. doi:10.1145/3414685.3417766 , journal =
-
[48]
Li, Yifei and Du, Tao and Wu, Kui and Xu, Jie and Matusik, Wojciech , title =. 2022 , issue_date =. doi:10.1145/3527660 , journal =
-
[49]
Differentiable Cloth Simulation for Inverse Problems , url =
Liang, Junbang and Lin, Ming and Koltun, Vladlen , booktitle =. Differentiable Cloth Simulation for Inverse Problems , url =
- [50]
-
[51]
International Conference on Learning Representations , year=
Learning Particle Dynamics for Manipulating Rigid Bodies, Deformable Objects, and Fluids , author=. International Conference on Learning Representations , year=
- [52]
-
[53]
Dynamic simulation of soft multimaterial 3d-printed objects , author=. Soft robotics , volume=. 2014 , publisher=
work page 2014
-
[54]
SOFA - an Open Source Framework for Medical Simulation , volume =
Allard, Jeremie and Cotin, St. SOFA - an Open Source Framework for Medical Simulation , volume =. 2007 , month =
work page 2007
-
[55]
Evolving swimming soft-bodied creatures , author=. ALIFE XV, the fifteenth international conference on the synthesis and simulation of living systems, late breaking proceedings , volume=
-
[56]
Corucci, Francesco and Cheney, Nick and Lipson, Hod and Laschi, Cecilia and Bongard, Josh , year =. Material properties affect evolution's ability to exploit morphological computation in growing soft-bodied creatures , doi =
-
[57]
Cheney, Nick and MacCurdy, Robert and Clune, Jeff and Lipson, Hod , title =. 2013 , isbn =. doi:10.1145/2463372.2463404 , booktitle =
-
[58]
Lee, Seunghwan and Yu, Ri and Park, Jungnam and Aanjaneya, Mridul and Sifakis, Eftychios and Lee, Jehee , title =. 2018 , issue_date =. doi:10.1145/3197517.3201330 , journal =
-
[59]
Real-Time subspace integration for St
Barbi. Real-Time subspace integration for St. Venant-Kirchhoff deformable models , year =. doi:10.1145/1073204.1073300 , journal =
-
[60]
Thieffry, Maxime and Kruszewski, Alexandre and Duriez, Christian and Guerra, Thierry-Marie , URL =. 2019 , MONTH = Jan, DOI =
work page 2019
- [61]
-
[62]
Min, Sehee and Won, Jungdam and Lee, Seunghwan and Park, Jungnam and Lee, Jehee , title =. 2019 , issue_date =. doi:10.1145/3355089.3356497 , journal =
-
[63]
Spielberg, Andrew and Zhao, Allan and Hu, Yuanming and Du, Tao and Matusik, Wojciech and Rus, Daniela , booktitle =. Learning-In-The-Loop Optimization: End-To-End Control And Co-Design Of Soft Robots Through Learned Deep Latent Representations , url =
-
[64]
Huang, Zizhou and Tozoni, Davi Colli and Gjoka, Arvi and Ferguson, Zachary and Schneider, Teseo and Panozzo, Daniele and Zorin, Denis , title =. 2024 , issue_date =. doi:10.1145/3657648 , journal =
-
[65]
Benchekroun, Otman and Xie, Kaixiang and Liu, Hsueh-Ti Derek and Grinspun, Eitan and Andrews, Sheldon and Zordan, Victor , title =. 2024 , isbn =. doi:10.1145/3680528.3687638 , booktitle =
-
[66]
Trusty, Ty and Fei, Yun (Raymond) and Levin, David and Kaufman, Danny , title =. 2024 , issue_date =. doi:10.1145/3687946 , journal =
-
[67]
Benchekroun, Otman and Grinspun, Eitan and Chiaramonte, Maurizio and Etter, Philip Allen , title =. 2025 , issue_date =. doi:10.1145/3763310 , journal =
- [68]
-
[69]
Mooney, M. , title =. Journal of Applied Physics , volume =. 1940 , month =. doi:10.1063/1.1712836 , url =
-
[70]
Rivlin, R. S. , title =. Journal of Applied Physics , volume =. 1947 , month =. doi:10.1063/1.1697674 , url =
-
[71]
Kumar, Nomesh and Rao, V. Venkateswara , title =. MIT International Journal of Mechanical Engineering , year =
-
[72]
Smith, Breannan and Goes, Fernando De and Kim, Theodore , title =. 2018 , issue_date =. doi:10.1145/3180491 , journal =
-
[73]
Kim, Theodore and Eberle, David , title =. 2020 , isbn =. doi:10.1145/3388769.3407490 , booktitle =
- [74]
- [75]
-
[76]
Fu, Xiao-Ming and Liu, Yang , title =. 2016 , issue_date =. doi:10.1145/2980179.2980231 , journal =
-
[77]
SIAM Journal on Optimization , volume =
Paternain, Santiago and Mokhtari, Aryan and Ribeiro, Alejandro , title =. SIAM Journal on Optimization , volume =. 2019 , doi =
work page 2019
-
[78]
Pitfalls of Projection: A study of Newton-type solvers for incremental potentials , author=. 2023 , eprint=
work page 2023
-
[79]
Lan, Lei and Li, Minchen and Jiang, Chenfanfu and Wang, Huamin and Yang, Yin , title =. 2023 , issue_date =. doi:10.1145/3592104 , journal =
-
[80]
Shen, Xing and Cai, Runyuan and Bi, Mengxiao and Lv, Tangjie , title =. 2024 , isbn =. doi:10.1145/3641519.3657490 , booktitle =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.