Motion-Coupled Sensing: When the State Change Powers Its Own Sensing
Pith reviewed 2026-05-20 02:15 UTC · model grok-4.3
The pith
Routine hinge motion supplies enough energy for one full ultrasonic measurement and long-range wireless transmission without batteries.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Routine hinge motion can supply enough energy for one bounded wake-sense-transmit transaction, including ultrasonic sensing and a long-range LoRa uplink. The authors call this principle motion-coupled sensing and instantiate it with an open-source compact electromagnetic harvester that retrofits to bins, doors, and cabinets with no structural modification. The bin deployment reaches 99.3 percent per-event transmission reliability over 5,945 actuations, while door and cabinet deployments reach 92 percent and 94 percent success over 1,870 and 1,636 actuations respectively.
What carries the argument
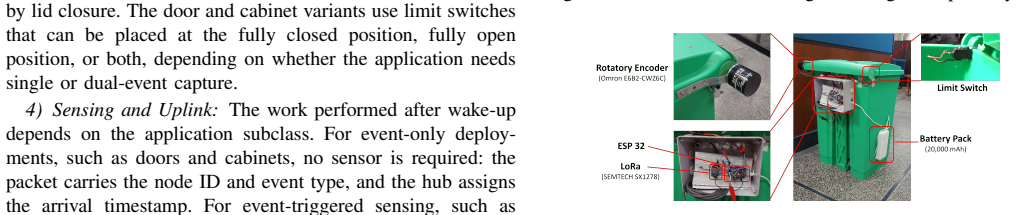
A compact electromagnetic harvester mounted on hinges that converts mechanical actuation energy into electrical power sufficient for one ultrasonic distance measurement plus LoRa uplink.
If this is right
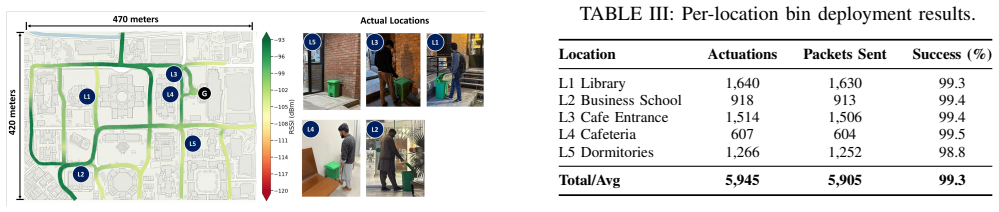
- Waste-bin monitoring achieves 99.3 percent per-event transmission reliability across 5,945 lid actuations at five locations.
- The same hardware envelope transfers to room doors and office cabinets, yielding 92 percent and 94 percent transmission success without redesign.
- Periodic polling and scheduled battery maintenance become unnecessary for IoT systems that monitor accessed spaces.
- Mechanical access can be treated as a self-powered sensing transaction rather than a separate energy or reporting event.
Where Pith is reading between the lines
- The same harvesting approach could apply to other mechanical interfaces where opening or closing coincides with a measurable state change, such as gates or appliance doors.
- Large-scale deployments of access-triggered sensors could reduce long-term maintenance costs by eliminating battery replacements across many devices.
- If energy yield varies with user force or temperature, lightweight adaptive sampling could extend the method to lower-energy actuations.
Load-bearing premise
Each hinge actuation produces sufficient and consistent mechanical energy to complete the ultrasonic measurement and LoRa uplink under typical user behavior and normal conditions.
What would settle it
A sequence of everyday hinge actuations in which the harvester fails to generate enough power for the sensor to complete the full measurement and transmission sequence.
Figures








read the original abstract
Batteryless IoT systems have largely followed two paths: ambient-energy sensing, where energy arrival is decoupled from the event being monitored, and kinetic event telegrams, where a user actuation powers a short report of the actuation itself. Mechanically gated states expose a third case: the access motion is not only an event to report, but the moment at which a latent physical state may have changed and must be measured. We show that routine hinge motion can supply enough energy for one bounded wake-sense-transmit transaction, including ultrasonic sensing and a long-range LoRa uplink. We call this principle motion-coupled sensing and instantiate it with an open-source compact electromagnetic harvester that retrofits to bins, doors, and cabinets with no structural modification. We size the platform for the most demanding workload, waste-bin monitoring, where each actuation must power both an ultrasonic measurement and a long-range LoRa uplink. Across five campus locations and 5,945 lid actuations, the bin deployment achieves 99.3% per-event transmission reliability. Field deployments on room doors with 1,870 actuations and office cabinets with 1,636 actuations achieve 92% and 94% transmission success respectively, demonstrating that the same energy envelope transfers across hinge geometries without hardware redesign. These results show that mechanical access can be treated as a self-powered sensing transaction, removing periodic polling and scheduled battery maintenance for IoT deployments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces motion-coupled sensing, where routine hinge actuations (opening bins, doors, or cabinets) generate mechanical energy via a compact electromagnetic harvester to power a single batteryless IoT transaction: wake-up, ultrasonic state sensing, and long-range LoRa uplink. It reports field results from 5,945 bin actuations (99.3% success), 1,870 door actuations (92% success), and 1,636 cabinet actuations (94% success) across campus sites, claiming the same hardware envelope works across geometries without redesign and removes the need for batteries or polling.
Significance. If the energy sufficiency holds under real-world variability, the work could meaningfully advance self-powered IoT for access and state monitoring by treating the actuation itself as the power source for sensing and reporting. The large empirical dataset (over 9,000 actuations) and open-source harvester design provide concrete, reproducible support for practical viability in the tested scenarios.
major comments (2)
- [Evaluation] The central claim that each routine actuation supplies sufficient energy for the full ultrasonic-plus-LoRa cycle rests on aggregate success rates, but the evaluation does not bound or histogram actuation force, speed, or harvested energy. Without these statistics, it is unclear whether gentler or slower motions (still registering as valid openings) fall below the transaction energy threshold.
- [Results] No section derives or measures the minimum energy envelope versus observed actuation statistics, leaving the weakest assumption (consistent energy delivery across users and hinges) untested beyond the reported 92–99.3% rates.
minor comments (2)
- [Abstract] The abstract would benefit from a concise statement of the per-transaction energy budget or harvester efficiency to contextualize the success rates.
- Figure captions and deployment descriptions could more explicitly note the number of sites and any environmental variations observed.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the strength of our empirical claims. We respond to each major comment below and indicate planned revisions.
read point-by-point responses
-
Referee: [Evaluation] The central claim that each routine actuation supplies sufficient energy for the full ultrasonic-plus-LoRa cycle rests on aggregate success rates, but the evaluation does not bound or histogram actuation force, speed, or harvested energy. Without these statistics, it is unclear whether gentler or slower motions (still registering as valid openings) fall below the transaction energy threshold.
Authors: We agree that direct histograms of force, speed, or per-actuation harvested energy would provide stronger evidence. Our current evaluation relies on aggregate success rates from uncontrolled real-world use by many individuals over weeks, which inherently samples a distribution of actuation strengths. The 99.3 % bin, 92 % door, and 94 % cabinet success rates across 9,451 events therefore already incorporate gentler motions that still triggered valid openings. In revision we will add a new subsection that reports laboratory measurements of the minimum energy required for a complete wake-sense-transmit cycle and discusses how the observed field reliability bounds the fraction of sub-threshold actuations. revision: partial
-
Referee: [Results] No section derives or measures the minimum energy envelope versus observed actuation statistics, leaving the weakest assumption (consistent energy delivery across users and hinges) untested beyond the reported 92–99.3% rates.
Authors: The manuscript already sizes the harvester and electronics for the most demanding workload (waste-bin ultrasonic ranging plus LoRa uplink) and shows that the identical hardware envelope succeeds on doors and cabinets without redesign. This cross-geometry consistency provides indirect support for the assumption. To make the energy envelope explicit, we will insert a short derivation of the transaction energy budget together with the laboratory characterization of the harvester output under representative hinge velocities; we will then relate these figures to the per-deployment success rates. revision: yes
Circularity Check
No circularity: purely empirical deployment results
full rationale
The paper reports measured transmission success rates (99.3% on bins, 92% on doors, 94% on cabinets) from 9,451 real-world actuations across five locations. No derivation, equation, prediction, or first-principles argument is presented that reduces to fitted parameters, self-citations, or renamed inputs. The central claim rests on direct field measurements of energy sufficiency under actual use, which are externally falsifiable and independent of any analytical chain within the paper.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Typical user actuations on hinges produce mechanical energy above the threshold needed for one ultrasonic measurement plus LoRa transmission.
Reference graph
Works this paper leans on
-
[1]
A battery free internet of things,
J. Hester, “A battery free internet of things,”Comm. of the ACM, 2021
work page 2021
-
[2]
D. Zhu and S. Beeby, “Kinetic energy harvesting,”Energy Harvesting Systems: Principles, Modeling and Applications, 2011
work page 2011
-
[3]
Using of batteryless LoRaW AN ultrasonic sensor node for smart garbage collection,
S. Asenov and D. Tokmakov, “Using of batteryless LoRaW AN ultrasonic sensor node for smart garbage collection,” inELECTRONICA, 2022
work page 2022
-
[4]
A. K. Ziraba, T. N. Haregu, and B. Mberu, “A review and framework for understanding the potential impact of poor solid waste management on health in developing countries,”Archives of Public Health, 2016
work page 2016
-
[5]
Integrated sustainable waste management in developing countries,
D. C. Wilson, C. A. Velis, and L. Rodic, “Integrated sustainable waste management in developing countries,”Proceedings of the Institution of Civil Engineers: Waste and Resource Management, 2013
work page 2013
-
[6]
IoT-based solid waste management solutions: A survey,
K. Pardiniet al., “IoT-based solid waste management solutions: A survey,”Journal of Sensor and Actuator Networks, 2019
work page 2019
-
[7]
IoT-enabled smart waste management systems for smart cities: A systematic review,
I. Sosunova and J. Porras, “IoT-enabled smart waste management systems for smart cities: A systematic review,”IEEE Access, 2022
work page 2022
-
[8]
Intelligent waste management solutions,
Nordsense, “Intelligent waste management solutions,” 2025
work page 2025
-
[9]
Smart waste and recycling solutions,
Bigbelly, “Smart waste and recycling solutions,” 2025
work page 2025
-
[10]
Wireless sensor network based home monitoring system for wellness determination of elderly,
N. K. Suryadevara and S. C. Mukhopadhyay, “Wireless sensor network based home monitoring system for wellness determination of elderly,” IEEE Sensors Journal, 2012
work page 2012
-
[11]
Towards the implementation of IoT for environmental condition monitoring in homes,
Kellyet al., “Towards the implementation of IoT for environmental condition monitoring in homes,”IEEE Sensors Journal, 2013
work page 2013
-
[12]
EnOcean – the world of energy harvesting wireless technology,
EnOcean GmbH, “EnOcean – the world of energy harvesting wireless technology,” White Paper, Feb. 2020
work page 2020
-
[13]
Design of an RFID-based battery-free programmable sensing platform,
A. P. Sampleet al., “Design of an RFID-based battery-free programmable sensing platform,”IEEE TIM, 2008
work page 2008
-
[14]
Ambient backscatter: Wireless communication out of thin air,
V . Liu, A. Parks, V . Talla, S. Gollakota, D. Wetherall, and J. R. Smith, “Ambient backscatter: Wireless communication out of thin air,” inProceedings of the ACM SIGCOMM Conference, 2013, pp. 39–50
work page 2013
-
[15]
Mementos: System support for long- running computation on RFID-scale devices,
B. Ransford, J. Sorber, and K. Fu, “Mementos: System support for long- running computation on RFID-scale devices,” inASPLOS, 2011
work page 2011
-
[16]
Timely execution on intermittently powered batteryless sensors,
J. Hester, L. Sitanayah, and J. Sorber, “Timely execution on intermittently powered batteryless sensors,” inSenSys, 2017
work page 2017
-
[17]
Energy-aware sensing on battery-less LoRaW AN devices with energy harvesting,
A. Sabovicet al., “Energy-aware sensing on battery-less LoRaW AN devices with energy harvesting,”Electronics, vol. 9, no. 6, p. 904, 2020
work page 2020
-
[18]
Kinetic energy harvesting based sensing and IoT systems: A review,
Z. Chen, F. Gao, and J. Liang, “Kinetic energy harvesting based sensing and IoT systems: A review,”Frontiers in Electronics, 2022
work page 2022
-
[19]
Y . Xuet al., “Self-powered RPM sensor using a single-anchor variable reluctance energy harvester with pendulum effects,” inENSsys, 2023
work page 2023
-
[20]
Design and implementation of an event-driven smart sensor node for wireless monitoring systems,
C. Liuet al., “Design and implementation of an event-driven smart sensor node for wireless monitoring systems,”Sensors, 2023
work page 2023
-
[21]
Self-sustaining ultra-wideband positioning system for event-driven indoor localization,
P. Mayeret al., “Self-sustaining ultra-wideband positioning system for event-driven indoor localization,”IEEE Internet of Things Journal, 2023
work page 2023
-
[22]
ATmega328P: 8-bit A VR microcontroller with 32k bytes in-system programmable flash,
Atmel Corporation, “ATmega328P: 8-bit A VR microcontroller with 32k bytes in-system programmable flash,” Datasheet, 2015
work page 2015
-
[23]
SX1278: 137 mhz to 1020 mhz low power long range transceiver,
Semtech Corporation, “SX1278: 137 mhz to 1020 mhz low power long range transceiver,” Datasheet, 2015
work page 2015
-
[24]
Saavedraet al., “The smart meter challenge: Feasibility of autonomous indoor IoT devices depending on its energy harvesting source and IoT wireless technology,”Sensors, 2021
work page 2021
-
[25]
E6B2-CWZ6C incremental rotary encoder,
Omron Corporation, “E6B2-CWZ6C incremental rotary encoder,” 2020
work page 2020
-
[26]
HC-SR04: Ultrasonic ranging module,
ETC, “HC-SR04: Ultrasonic ranging module,” Datasheet, 2013
work page 2013
-
[27]
IoT-based smart garbage system for efficient food waste management,
I. Honget al., “IoT-based smart garbage system for efficient food waste management,”The Scientific World Journal, 2014
work page 2014
-
[28]
A multi-layer LoRaW AN infrastructure for smart waste management,
D. Baldoet al., “A multi-layer LoRaW AN infrastructure for smart waste management,”Sensors, 2021
work page 2021
-
[29]
On the coverage of LPW ANs: Range evaluation and channel attenuation model for LoRa technology,
J. Petajajarviet al., “On the coverage of LPW ANs: Range evaluation and channel attenuation model for LoRa technology,”ITST, 2015
work page 2015
-
[30]
Batteryless harvester module: 10,000-iteration mechanical stress test (6 h 46 min),
“Batteryless harvester module: 10,000-iteration mechanical stress test (6 h 46 min),” https://tinyurl.com/yn5ekxc2, 2026
work page 2026
-
[31]
Batteryless harvester module: Door evaluation (2 h 25 min),
“Batteryless harvester module: Door evaluation (2 h 25 min),” https:// shorturl.at/BA1z8, 2026
work page 2026
-
[32]
Batteryless harvester module: Cabinet evaluation (1 h 13 min),
“Batteryless harvester module: Cabinet evaluation (1 h 13 min),” https: //shorturl.at/NqOQz, 2026
work page 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.