Comparative Analysis of Military Detection Using Drone Imagery Across Multiple Visual Spectrums
Pith reviewed 2026-05-21 04:36 UTC · model grok-4.3
The pith
Training the YOLOv11-small model on four synthetic drone image styles allows military object detection under simulated low-visibility, thermal, and nighttime conditions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Creating synthetic Gray Scale, Thermal Vision, Night Vision, and Obscura Vision versions of the KIIT-MiTA drone imagery and training YOLOv11-small on them produces object detectors that function across those simulated visual conditions.
What carries the argument
The YOLOv11-small model trained on the four synthetically generated image styles derived from the KIIT-MiTA drone dataset.
If this is right
- Detection systems become usable in low-light and heat-signature scenarios without needing separate real-sensor training sets.
- Drone operations gain reliability for both surveillance and strike missions under changing visibility.
- The same synthetic-generation approach can be applied to other military or civilian drone datasets.
Where Pith is reading between the lines
- Direct comparison of model performance on real sensor data versus the synthetic versions would quantify how much domain gap remains.
- Testing the trained model on entirely new military object classes not seen in the original KIIT-MiTA set would show generalization limits.
- Deploying the detector on actual drones and logging failure cases in the field would reveal operational gaps the synthetic data missed.
Load-bearing premise
The four synthetically generated image styles faithfully reproduce the statistical properties and detection challenges of actual field-collected imagery in those modalities.
What would settle it
Acquire real thermal or night-vision drone footage of the same military objects and measure whether the model trained only on the synthetic versions achieves comparable detection rates on the real footage.
Figures




read the original abstract
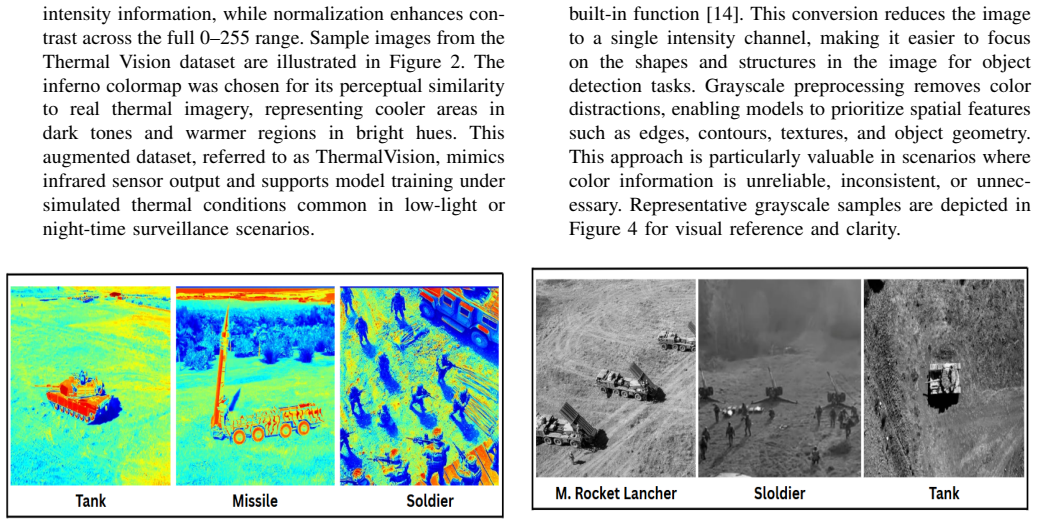
In modern warfare, drones are becoming an essential part of intelligence gathering and carrying out precise attacks in different kinds of hostile environments. Their ability to operate in real-time and hostile environments from a safe distance makes them invaluable for surveillance and military operations. The KIIT-MiTA dataset is comprised of images of different military scenarios taken from drones, and these provide a foundation for detecting military objects, but it does not take into account the various types of real-world scenarios. With that in mind, to evaluate how the models are performing under varying conditions, four different types of datasets are created: Gray Scale, Thermal Vision, Night Vision, and Obscura Vision. These simulate the real-world environments such as low visibility, heat-based imagery, and nighttime conditions. The YOLOv11-small model is trained and used to detect objects across diverse settings. This research boosts the performance and reliability of drone-based operations by contributing to the development of advanced detection systems in both defensive and offensive missions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper evaluates the YOLOv11-small object detector on the KIIT-MiTA drone imagery dataset for military object detection. It generates four synthetic visual modalities (Gray Scale, Thermal Vision, Night Vision, Obscura Vision) from the original RGB images to simulate diverse operational conditions and compares model performance across these variants, claiming improved reliability for real-world drone-based military missions.
Significance. If the synthetic modalities accurately reproduce the statistical properties and detection challenges of real sensor data, the empirical comparison could offer practical guidance on detector robustness for military drone operations in varied visibility and spectral conditions. The work is a straightforward empirical study without machine-checked proofs, parameter-free derivations, or reported reproducible code, so its significance hinges on the fidelity of the image transformations.
major comments (1)
- [Methods] Methods section (dataset creation): The forward simulations for Thermal Vision, Night Vision, and Obscura Vision are described only as stylistic mappings from the original RGB KIIT-MiTA images, with no quantitative fidelity checks (e.g., histogram matching, noise power spectrum, or contrast statistics) against real thermal, SWIR, or low-light sensor captures. This directly weakens the central claim that performance differences demonstrate reliability for actual field operations.
minor comments (2)
- [Abstract] Abstract: The phrase 'Obscura Vision' is introduced without definition or reference; a brief clarification of its generation process would improve readability.
- [Results] Results: No mention of baseline comparisons (e.g., against YOLOv8 or standard RGB-only training) or statistical significance testing of mAP differences appears in the provided text; adding these would strengthen the comparative analysis.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We have revised the Methods section to provide more explicit details on the simulation process and added basic quantitative characterizations of the image transformations.
read point-by-point responses
-
Referee: [Methods] Methods section (dataset creation): The forward simulations for Thermal Vision, Night Vision, and Obscura Vision are described only as stylistic mappings from the original RGB KIIT-MiTA images, with no quantitative fidelity checks (e.g., histogram matching, noise power spectrum, or contrast statistics) against real thermal, SWIR, or low-light sensor captures. This directly weakens the central claim that performance differences demonstrate reliability for actual field operations.
Authors: We agree that the original description was brief and that quantitative checks against real sensor data would be ideal. The KIIT-MiTA dataset contains only RGB drone imagery with no paired real thermal, SWIR, or low-light captures available for the same scenes, so direct fidelity validation to actual hardware outputs is not feasible. The four variants were created as stylistic simulations to approximate common operational visual conditions (grayscale, heat-signature style, low-light enhancement, and reduced-visibility) for the purpose of testing detector robustness. In the revision we have expanded the Methods section with explicit transformation steps and formulas for each modality. We have also added a new table reporting basic image statistics (mean intensity, contrast via RMS, and histogram intersection scores) between the original RGB and each simulated variant to characterize the changes introduced. Claims in the abstract, introduction, and conclusion have been tempered to emphasize evaluation under simulated conditions as a proxy rather than direct equivalence to field sensor data. revision: partial
- Direct quantitative fidelity validation against real thermal, SWIR, or low-light sensor captures, as no such paired multi-spectral data exists for the KIIT-MiTA scenes.
Circularity Check
No circularity: purely empirical comparison on synthetic variants
full rationale
The paper describes creation of four synthetic image styles (Gray Scale, Thermal Vision, Night Vision, Obscura Vision) from the KIIT-MiTA RGB drone dataset, followed by training and evaluation of YOLOv11-small for military object detection. No mathematical derivations, equations, fitted parameters, or self-citations are present that reduce any claimed result to its own inputs by construction. The analysis consists of direct performance measurements (mAP etc.) on the generated data, which is self-contained as an empirical study without load-bearing reductions to self-defined quantities.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Synthetic image transformations preserve the object-detection-relevant statistics of real thermal, night-vision, and low-visibility imagery.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/DimensionForcingD3_admits_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The YOLOv11-small model is trained and used to detect objects across diverse settings.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
H. Luhao and et al., “Research and application of yolov11-based object segmentation in intelligent recognition at construction sites,”Buildings, vol. 14, no. 12, p. 3777, 2024
work page 2024
-
[2]
Drones in defense: Real-time vision-based military target surveillance and tracking,
S. Chakrabarty, R. Chatterjee, S. Chakraborty, S. Roy Shuvo, and R. Chowdhury, “Drones in defense: Real-time vision-based military target surveillance and tracking,” in2025 3rd ISACC. IEEE, 2025, pp. 508–513
work page 2025
-
[3]
Object detection from uav thermal infrared images and videos using yolo models,
J. Chenchen and et al., “Object detection from uav thermal infrared images and videos using yolo models,”International Journal of Applied Earth Observation and Geoinformation, vol. 112, p. 102912, 2022
work page 2022
-
[4]
A systematic literature review on object detection using near infrared and thermal images,
B. Nicolas and et al., “A systematic literature review on object detection using near infrared and thermal images,”Neurocomputing, vol. 560, p. 126804, 2023
work page 2023
-
[5]
Making of night vision: Object detection under low-illumination,
X. Yuxuan and et al., “Making of night vision: Object detection under low-illumination,”IEEE Access, vol. 8, pp. 123 075–123 086, 2020
work page 2020
-
[6]
Object detection for night vision using deep learning algorithms,
B. Dipali and et al., “Object detection for night vision using deep learning algorithms,”International Journal of Computer Trends and Technology, vol. 71, no. 2, pp. 87–92, 2023
work page 2023
-
[7]
Yolo-firi: Improved yolov5 for infrared image object detection,
L. Shasha and et al., “Yolo-firi: Improved yolov5 for infrared image object detection,”IEEE access, vol. 9, pp. 141 861–141 875, 2021
work page 2021
-
[8]
Multi-yolov8: An infrared moving small object detection model based on yolov8 for air vehicle,
S. Shizun and et al., “Multi-yolov8: An infrared moving small object detection model based on yolov8 for air vehicle,”Neurocomputing, vol. 588, p. 127685, 2024
work page 2024
-
[9]
Detection of objects from noisy images,
N. Al-Akhir and et al., “Detection of objects from noisy images,” in 2020 2nd STI. IEEE, 2020, pp. 1–6
work page 2020
-
[10]
The impact of noise and brightness on object detection methods,
J. A. Rodr ´ıguez-Rodr´ıguez, E. L ´opez-Rubio, J. A. ´Angel-Ruiz, and M. A. Molina-Cabello, “The impact of noise and brightness on object detection methods,”Sensors, vol. 24, no. 3, p. 821, 2024
work page 2024
-
[11]
Fast object detection in digital grayscale images,
L. Aivars and et al., “Fast object detection in digital grayscale images,” inProceedings of the Latvian Academy of Sciences, vol. 63, no. 3. De Gruyter Poland, 2009, p. 116
work page 2009
-
[12]
colorspace: A toolbox for manipulating and assessing colors and palettes,
Z. Achim and et al., “colorspace: A toolbox for manipulating and assessing colors and palettes,”Journal of Statistical Software, vol. 96, pp. 1–49, 2020
work page 2020
-
[13]
Advanced image processing using opencv,
S. Himanshu, “Advanced image processing using opencv,” inPractical Machine Learning and Image Processing: For Facial Recognition, Object Detection, and Pattern Recognition Using Python. Springer, 2019, pp. 63–88
work page 2019
-
[14]
A comparative study of converting coloured image to gray- scale image using different technologies,
K. Kavita, “A comparative study of converting coloured image to gray- scale image using different technologies,”Department of Computer Science, Fergusson College, Pune India, 2012
work page 2012
-
[15]
Blur image detection using laplacian operator and open-cv,
B. Raghav and et al., “Blur image detection using laplacian operator and open-cv,” in2016 SMART, 2016, pp. 63–67
work page 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.