Provably Guaranteed Polytopic Uncertainty Quantification for SLAM
Pith reviewed 2026-06-29 11:57 UTC · model grok-4.3
The pith
Polytopes produce certified uncertainty sets that provably contain true poses and landmarks throughout the full SLAM pipeline.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
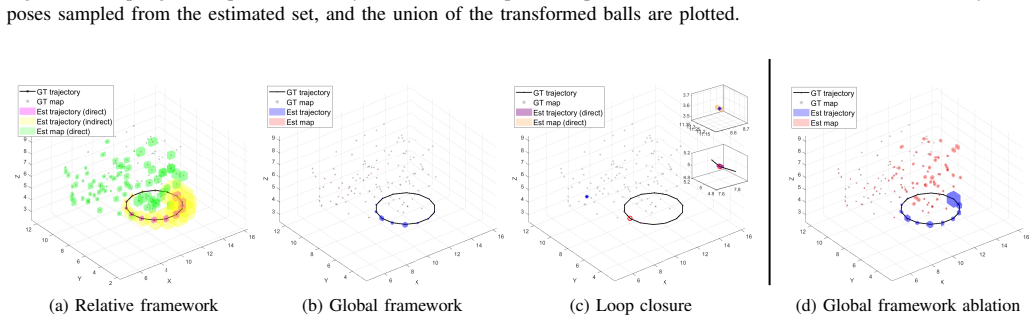
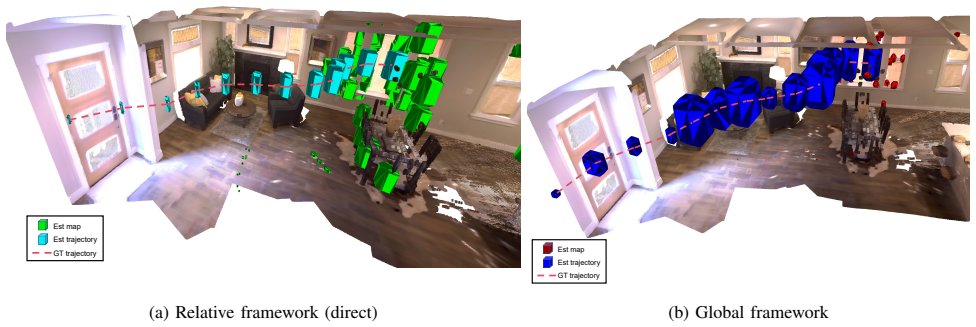
The algorithms consist of three basic UQ modules: forward UQ for mapping, backward UQ for pose tracking, and pose compound. Each module produces a certified uncertainty set; when the input uncertainty bounds are deterministic, the output sets inherit deterministic guarantees, i.e., they provably contain the true poses and landmarks. Polytopes represent the uncertainty sets to enable tractable computations and a unified treatment of pose uncertainty.
What carries the argument
Three basic UQ modules that propagate polytopic uncertainty sets forward and backward while preserving containment under the chosen pose compound operation.
If this is right
- Certified polytopic sets are generated for both mapping and pose tracking modules.
- The complete SLAM pipeline maintains provable containment of true states when inputs are deterministic.
- Conformal prediction supplies data-driven calibration of measurement uncertainty at a user-specified probability.
- Polytopic representation supports unified handling of pose uncertainty across the pipeline.
- The method is demonstrated on simulations and real experiments with open-sourced code.
Where Pith is reading between the lines
- The modular structure could allow substitution of individual UQ modules with alternative set representations if containment is maintained.
- The approach suggests a template for adding formal guarantees to other sequential estimation pipelines in robotics.
- Open-sourced implementation enables direct testing on additional robot platforms or datasets to check tightness of the sets.
- In deployed systems the certified sets could serve as inputs to downstream safety monitors or planners.
Load-bearing premise
Polytopes admit tractable forward and backward propagation through the full SLAM pipeline while preserving the containment property under the chosen pose compound operation.
What would settle it
A simulation or experiment in which a true pose or landmark lies outside the output polytopic set after module propagation, even though the input uncertainty bounds were deterministic.
Figures


read the original abstract
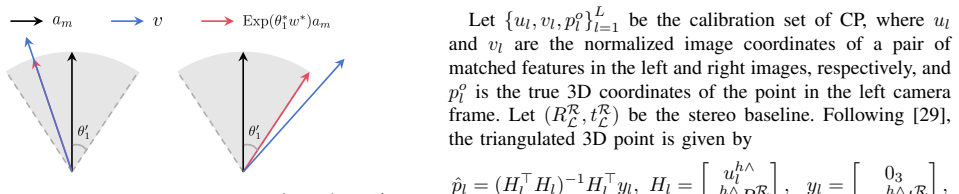
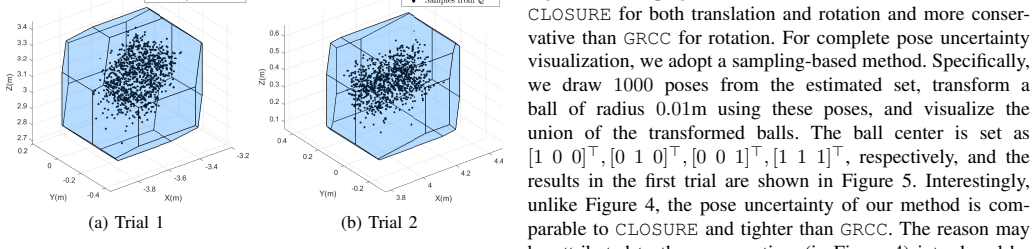
In safety-critical robotics applications, guaranteed and practical uncertainty quantification (UQ) in perception is vital. Many existing works either offer no formal containment guarantee, rely on restrictive modeling assumptions, or focus only on pose estimation rather than a complete SLAM pipeline. This paper presents provably guaranteed UQ algorithms for 3D-3D landmark-based SLAM. The algorithms consist of three basic UQ modules: forward UQ for mapping, backward UQ for pose tracking, and pose compound. Each module produces a certified uncertainty set; when the input uncertainty bounds are deterministic, the output sets inherit deterministic guarantees, i.e., they provably contain the true poses and landmarks. Specifically, we use polytopes to represent uncertainty sets, enabling tractable computations and a unified treatment of pose uncertainty. To enhance algorithms' practical usability, we incorporate conformal prediction to calibrate measurement uncertainty from data with prescribed probability. Simulations and experiments demonstrate that the proposed algorithms provide both strong theoretical guarantees and practical usability. The code is open-sourced at https://github.com/LIAS-CUHKSZ/Polytopic-SLAM-Uncertainty-Quantification.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims to introduce three polytopic UQ modules (forward mapping, backward tracking, and pose compound) for 3D-3D landmark-based SLAM that each produce certified uncertainty sets. When input bounds are deterministic, the output polytopes provably contain the true poses and landmarks; conformal prediction is used to calibrate measurement uncertainty from data, with simulations and experiments demonstrating both theoretical guarantees and practical usability. The code is open-sourced.
Significance. If the containment inheritance holds through the full pipeline, the work would address a notable gap by supplying tractable, provably guaranteed UQ for complete SLAM rather than isolated pose estimation. The open-sourced implementation and use of conformal calibration for data-driven bounds are concrete strengths that support reproducibility and usability in safety-critical robotics.
major comments (2)
- [abstract / § on pose compound module] The central claim rests on preservation of deterministic containment under the chosen pose compound operation (abstract, paragraph on the three basic UQ modules). The manuscript must explicitly define the compound operation and prove that the polytopic representation remains closed under it while inheriting the containment property; without this derivation the inheritance guarantee for the full SLAM pipeline is not yet load-bearing.
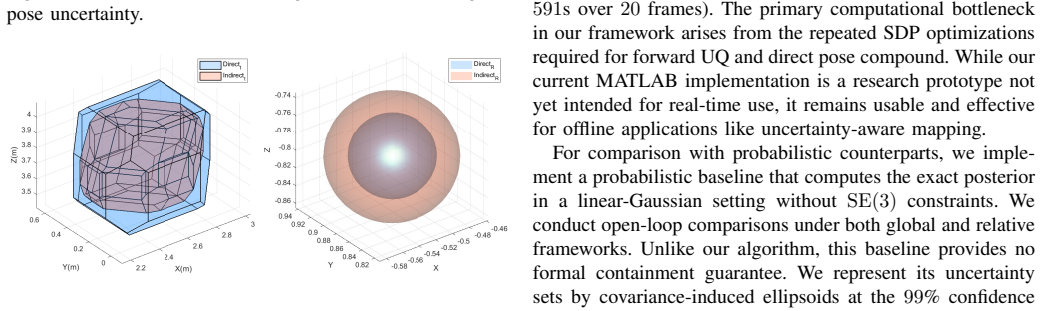
- [forward UQ and backward UQ modules] Forward and backward UQ modules are asserted to produce certified sets from deterministic input bounds. The error-propagation analysis (including any linearization or bounding steps) must be shown to be exact with respect to the containment property rather than conservative approximations; otherwise the deterministic guarantee reduces to a heuristic.
minor comments (2)
- Notation for polytopic sets and their vertices should be introduced once and used consistently across modules to avoid ambiguity in the propagation steps.
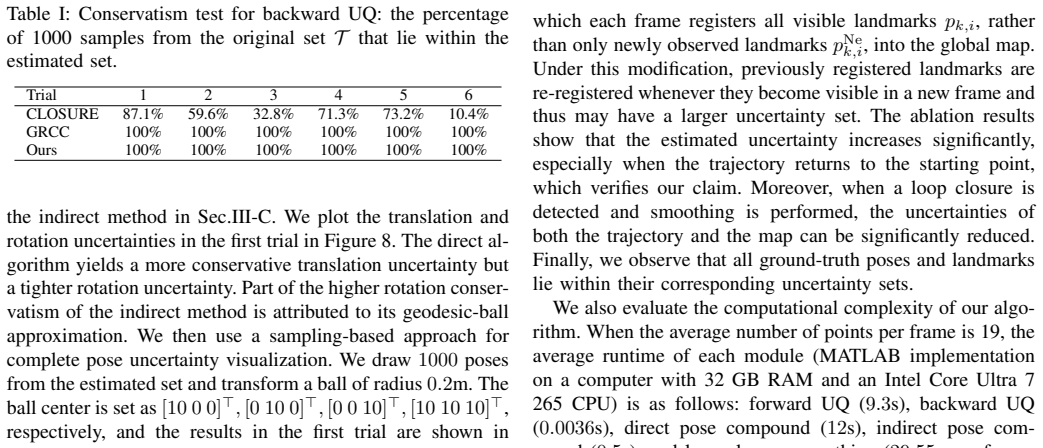
- The experimental section would benefit from explicit reporting of the fraction of trials in which the true landmarks/poses lie inside the computed polytopes, to directly support the containment claim.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and will revise the manuscript to make the definitions and proofs more explicit.
read point-by-point responses
-
Referee: [abstract / § on pose compound module] The central claim rests on preservation of deterministic containment under the chosen pose compound operation (abstract, paragraph on the three basic UQ modules). The manuscript must explicitly define the compound operation and prove that the polytopic representation remains closed under it while inheriting the containment property; without this derivation the inheritance guarantee for the full SLAM pipeline is not yet load-bearing.
Authors: The pose compound operation is defined in Section 3.3 as the SE(3) group action on polytopic uncertainty sets, realized via affine transformations and Minkowski sums. Proposition 3.4 proves closure under this operation and inheritance of deterministic containment. To strengthen visibility of this central result, we will add an explicit definition and a self-contained proof sketch immediately following the module overview in the revised manuscript. revision: yes
-
Referee: [forward UQ and backward UQ modules] Forward and backward UQ modules are asserted to produce certified sets from deterministic input bounds. The error-propagation analysis (including any linearization or bounding steps) must be shown to be exact with respect to the containment property rather than conservative approximations; otherwise the deterministic guarantee reduces to a heuristic.
Authors: The forward and backward modules employ set-valued mappings that are containment-preserving by construction: forward UQ computes the exact image of the input polytope under the measurement function using vertex-based outer approximation, while backward UQ uses the preimage under the inverse mapping with support-function bounds. No linearization is used. We will insert a short lemma in Sections 4 and 5 that formally states the containment property for each bounding step. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper constructs three UQ modules (forward mapping, backward tracking, pose compound) that propagate polytopic uncertainty sets while preserving deterministic containment whenever input bounds are deterministic. These properties follow directly from the choice of polytopic representation and the algebraic definition of the compound operation; no module output is obtained by fitting parameters to the target quantities or by renaming the inputs. Conformal prediction is invoked only for probabilistic calibration of measurement noise from external data and does not participate in the deterministic containment claims. No self-citation chain or uniqueness theorem imported from prior author work is required to establish the core guarantees. The derivation is therefore self-contained algorithmic construction rather than reduction to its own fitted inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Soft2: Stereo visual odometry for road vehicles based on a point-to-epipolar-line metric.IEEE Transactions on Robotics, 39(1):273–288, 2022
Igor Cviši ´c, Ivan Markovi ´c, and Ivan Petrovi ´c. Soft2: Stereo visual odometry for road vehicles based on a point-to-epipolar-line metric.IEEE Transactions on Robotics, 39(1):273–288, 2022
2022
-
[2]
Teaser: Fast and certifiable point cloud registration.IEEE Transac- tions on Robotics, 37(2):314–333, 2020
Heng Yang, Jingnan Shi, and Luca Carlone. Teaser: Fast and certifiable point cloud registration.IEEE Transac- tions on Robotics, 37(2):314–333, 2020
2020
-
[3]
Building rome with convex optimization
Haoyu Han and Heng Yang. Building rome with convex optimization. InProceedings of Robotics: Science and Systems, pages 1–19, 2025
2025
-
[4]
LSD- SLAM: Large-scale direct monocular SLAM
Jakob Engel, Thomas Schöps, and Daniel Cremers. LSD- SLAM: Large-scale direct monocular SLAM. InPro- ceedings of European Conference on Computer Vision, pages 834–849, 2014
2014
-
[5]
SE-Sync: A certifiably correct algorithm for synchronization over the special euclidean group.The International Journal of Robotics Research, 38(2-3):95– 125, 2019
David M Rosen, Luca Carlone, Afonso S Bandeira, and John J Leonard. SE-Sync: A certifiably correct algorithm for synchronization over the special euclidean group.The International Journal of Robotics Research, 38(2-3):95– 125, 2019
2019
-
[6]
Characterizing the uncertainty of jointly distributed poses in the Lie algebra.IEEE Transactions on Robotics, 36(5):1371–1388, 2020
Joshua G Mangelson, Maani Ghaffari, Ram Vasudevan, and Ryan M Eustice. Characterizing the uncertainty of jointly distributed poses in the Lie algebra.IEEE Transactions on Robotics, 36(5):1371–1388, 2020
2020
-
[7]
Closure: Fast quantification of pose uncertainty sets
Yihuai Gao, Yukai Tang, Han Qi, and Heng Yang. Closure: Fast quantification of pose uncertainty sets. In Proceedings of Robotics: Science and Systems, pages 1– 13, 2024
2024
-
[8]
gatekeeper: Online safety verification and control for nonlinear systems in dynamic environments
Devansh Ramgopal Agrawal, Ruichang Chen, and Dim- itra Panagou. gatekeeper: Online safety verification and control for nonlinear systems in dynamic environments. IEEE Transactions on Robotics, 40:4358–4375, 2024
2024
-
[9]
Springer Nature, 2022
Richard Szeliski.Computer Vision: Algorithms and Applications. Springer Nature, 2022
2022
-
[10]
Set- membership approach and kalman observer based on zonotopes for discrete-time descriptor systems.Automat- ica, 93:435–443, 2018
Ye Wang, Vicenç Puig, and Gabriela Cembrano. Set- membership approach and kalman observer based on zonotopes for discrete-time descriptor systems.Automat- ica, 93:435–443, 2018
2018
-
[11]
Set-based state esti- mation for discrete-time constrained nonlinear systems: An approach based on constrained zonotopes and DC programming.Automatica, 159:111401, 2024
Alesi A de Paula, Davide M Raimondo, Guilherme V Raffo, and Bruno OS Teixeira. Set-based state esti- mation for discrete-time constrained nonlinear systems: An approach based on constrained zonotopes and DC programming.Automatica, 159:111401, 2024
2024
-
[12]
Zonotopic set-membership state estimation for discrete-time descriptor LPV systems.IEEE Trans- actions on Automatic Control, 64(5):2092–2099, 2018
Ye Wang, Zhenhua Wang, Vicenç Puig, and Gabriela Cembrano. Zonotopic set-membership state estimation for discrete-time descriptor LPV systems.IEEE Trans- actions on Automatic Control, 64(5):2092–2099, 2018
2092
-
[13]
Param- eter estimation algorithms for a set-membership descrip- tion of uncertainty.Automatica, 26(5):887–898, 1990
Gustavo Belforte, Basilio Bona, and Vito Cerone. Param- eter estimation algorithms for a set-membership descrip- tion of uncertainty.Automatica, 26(5):887–898, 1990
1990
-
[14]
Set inversion via interval analysis for nonlinear bounded-error estimation.Auto- matica, 29(4):1053–1064, 1993
Luc Jaulin and Eric Walter. Set inversion via interval analysis for nonlinear bounded-error estimation.Auto- matica, 29(4):1053–1064, 1993
1993
-
[15]
Guaranteed SLAM—an interval approach.Robotics and Autonomous Systems, 100:160–170, 2018
Mohamed Mustafa, Alexandru Stancu, Nicolas De- lanoue, and Eduard Codres. Guaranteed SLAM—an interval approach.Robotics and Autonomous Systems, 100:160–170, 2018
2018
-
[16]
Interval-based visual-lidar sensor fusion.IEEE Robotics and Automa- tion Letters, 6(2):1304–1311, 2021
Raphael V oges and Bernardo Wagner. Interval-based visual-lidar sensor fusion.IEEE Robotics and Automa- tion Letters, 6(2):1304–1311, 2021
2021
-
[17]
Interval-based visual-inertial Li- DAR SLAM with anchoring poses
Aaronkumar Ehambram, Raphael V oges, Claus Brenner, and Bernardo Wagner. Interval-based visual-inertial Li- DAR SLAM with anchoring poses. InProceedings of International Conference on Robotics and Automation, pages 7589–7596, 2022
2022
-
[18]
Formal verification and control with conformal prediction: Practical safety guar- antees for autonomous systems.IEEE Control Systems, 45(6):72–122, 2025
Lars Lindemann, Yiqi Zhao, Xinyi Yu, George J Pappas, and Jyotirmoy V Deshmukh. Formal verification and control with conformal prediction: Practical safety guar- antees for autonomous systems.IEEE Control Systems, 45(6):72–122, 2025
2025
-
[19]
Con- formal prediction: A gentle introduction.Foundations and Trends® in Machine Learning, 16(4):494–591, 2023
Anastasios N Angelopoulos, Stephen Bates, et al. Con- formal prediction: A gentle introduction.Foundations and Trends® in Machine Learning, 16(4):494–591, 2023
2023
-
[20]
Uncertainty quantification of set-membership estimation in control and perception: Revisiting the minimum en- closing ellipsoid
Yukai Tang, Jean-Bernard Lasserre, and Heng Yang. Uncertainty quantification of set-membership estimation in control and perception: Revisiting the minimum en- closing ellipsoid. InProceedings of Annual Learning for Dynamics & Control Conference, pages 286–298, 2024
2024
-
[21]
Object pose estimation with statistical guarantees: Conformal keypoint detection and geometric uncertainty propagation
Heng Yang and Marco Pavone. Object pose estimation with statistical guarantees: Conformal keypoint detection and geometric uncertainty propagation. InProceedings of IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 8947–8958, 2023
2023
-
[22]
Uncertainty quantification for visual object pose estima- tion.arXiv preprint arXiv:2511.21666, 2025
Lorenzo Shaikewitz, Charis Georgiou, and Luca Carlone. Uncertainty quantification for visual object pose estima- tion.arXiv preprint arXiv:2511.21666, 2025
-
[23]
A tutorial on confor- mal prediction.Journal of Machine Learning Research, 9(3):371–421, 2008
Glenn Shafer and Vladimir V ovk. A tutorial on confor- mal prediction.Journal of Machine Learning Research, 9(3):371–421, 2008
2008
-
[24]
Conformal prediction: a unified review of theory and new challenges.Bernoulli, 29(1):1–23, 2023
Matteo Fontana, Gianluca Zeni, and Simone Vantini. Conformal prediction: a unified review of theory and new challenges.Bernoulli, 29(1):1–23, 2023
2023
-
[25]
On canonical representations of convex polyhedra
David Avis, Komei Fukuda, and Stefano Picozzi. On canonical representations of convex polyhedra. InMathe- matical Software, pages 350–360. World Scientific, 2002
2002
-
[26]
Ad- justable robust optimization via Fourier–Motzkin elimi- nation.Operations Research, 66(4):1086–1100, 2018
Jianzhe Zhen, Dick Den Hertog, and Melvyn Sim. Ad- justable robust optimization via Fourier–Motzkin elimi- nation.Operations Research, 66(4):1086–1100, 2018
2018
-
[27]
SIAM, 1994
Yurii Nesterov and Arkadii Nemirovskii.Interior-point polynomial algorithms in convex programming. SIAM, 1994
1994
-
[28]
Toward globally optimal state esti- mation using automatically tightened semidefinite relax- ations.IEEE Transactions on Robotics, 40:4338–4358, 2024
Frederike Dümbgen, Connor Holmes, Ben Agro, and Timothy Barfoot. Toward globally optimal state esti- mation using automatically tightened semidefinite relax- ations.IEEE Transactions on Robotics, 40:4338–4358, 2024
2024
-
[29]
Bias- eliminated PnP for stereo visual odometry: Provably consistent and large-scale localization.IEEE Robotics and Automation Letters, 10(11):11840–11847, 2025
Guangyang Zeng, Yuan Shen, Ziyang Hong, Yuze Hong, Viorela Ila, Guodong Shi, and Junfeng Wu. Bias- eliminated PnP for stereo visual odometry: Provably consistent and large-scale localization.IEEE Robotics and Automation Letters, 10(11):11840–11847, 2025
2025
-
[30]
Springer, 2018
John M Lee.Introduction to Riemannian Manifolds, volume 2. Springer, 2018
2018
-
[31]
LOAM: Lidar odometry and mapping in real-time
Ji Zhang, Sanjiv Singh, et al. LOAM: Lidar odometry and mapping in real-time. InProceedings of Robotics: Science and Systems, pages 1–9, 2014
2014
-
[32]
Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap SLAM
-
[33]
Cambridge University Press, 2004
Stephen Boyd and Lieven Vandenberghe.Convex Opti- mization. Cambridge University Press, 2004
2004
-
[34]
The Replica Dataset: A Digital Replica of Indoor Spaces
Julian Straub, Thomas Whelan, Lingni Ma, Yufan Chen, Erik Wijmans, Simon Green, Jakob J Engel, Raul Mur- Artal, Carl Ren, Shobhit Verma, et al. The replica dataset: A digital replica of indoor spaces.arXiv preprint arXiv:1906.05797, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1906
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.