Building Generalization Into Behavior Generation Via Adaptive Compositions of Regularities
Pith reviewed 2026-06-28 22:12 UTC · model grok-4.3
The pith
Adaptive composition of regularities produces context-appropriate robot behavior in novel conditions by modulating influence based on informativeness.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
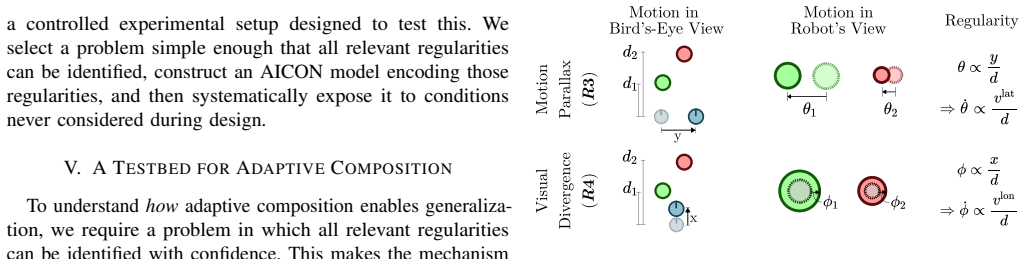
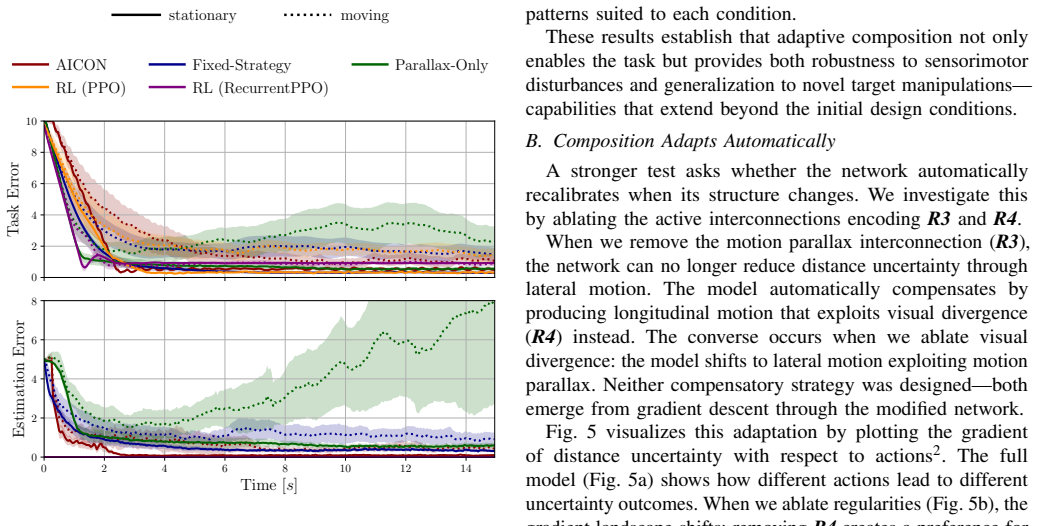
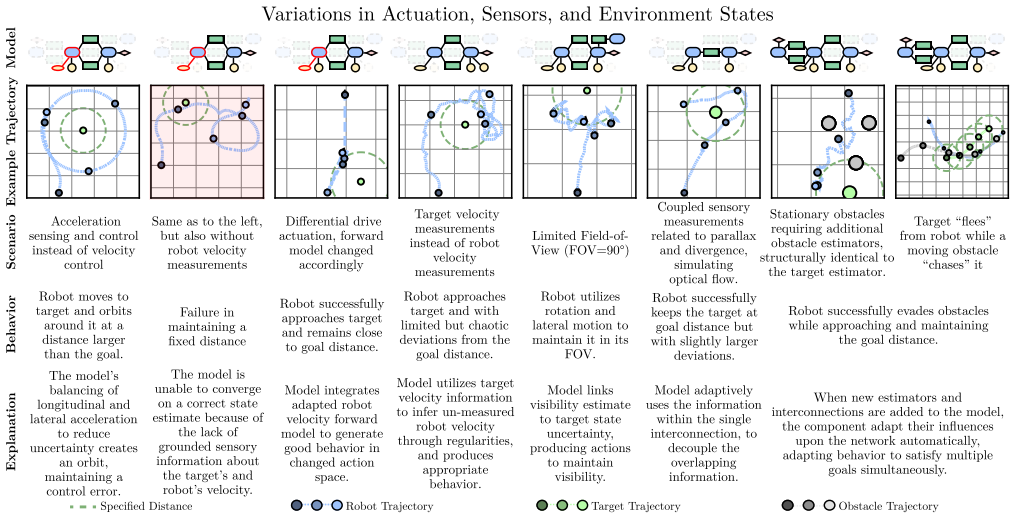
Generalization arises from adaptively composing regularities into situation-appropriate structures for behavior generation. In a model where regularities appear as interacting processes in a differentiable network, sensory feedback enacts the composition and gradient descent produces the behavior. When applied to a simple simulated problem containing every relevant regularity, the model generates context-appropriate behavior in all but one case where the regularities are provably insufficient, and ablations show automatic modulation of influence by informativeness.
What carries the argument
Adaptive composition of regularities realized through sensory feedback that selects and combines interacting processes in a differentiable network.
If this is right
- Behavior generation can succeed in conditions never seen during design as long as the necessary regularities are present.
- The system can automatically down-weight regularities that carry little information for the current situation.
- Generalization is achieved through the inductive bias of adaptive composition rather than through explicit coverage of every possible case.
- Failure occurs only when the encoded regularities themselves are inadequate for the task.
Where Pith is reading between the lines
- The same mechanism might allow extension to settings where some regularities must be discovered rather than supplied in advance.
- It could be tested whether the modulation of influence scales when the number of regularities grows large.
- One could examine whether similar adaptive selection appears in other behavior-generation methods that use feedback.
- If the modulation step is removed, performance should drop specifically on conditions that require selecting among competing regularities.
Load-bearing premise
All relevant regularities can be identified in advance and represented as interacting processes so the adaptive composition mechanism can be tested in isolation.
What would settle it
A novel condition in which the supplied regularities are sufficient yet the generated behavior is not context-appropriate, or a condition in which behavior succeeds without the automatic modulation by informativeness.
Figures



read the original abstract
Generalization in robotics requires prior knowledge about how the world is structured, yet this structure changes from one situation to the next. This paper investigates the proposition that generalization arises from adaptively composing regularities -- predictable relationships within the robot-environment system -- into situation-appropriate structures for behavior generation. We examine this proposition by analyzing the mechanism in AICON (Active InterCONnect), a framework representing regularities as interacting processes in a differentiable network, where sensory feedback realizes composition and gradient descent generates behavior. To isolate adaptive composition as the key mechanism, we study a simple simulated problem in which all relevant regularities can be identified. We expose the resulting model to a wide range of novel conditions not considered during design, and we find that it generates context-appropriate behavior in all but one case, where encoded regularities are provably insufficient. Ablations reveal that the network automatically modulates which regularities influence behavior based on their informativeness. These results suggest that adaptive composition of regularities constitutes a powerful inductive bias for building generalization into behavior generation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that generalization in robot behavior arises from adaptively composing regularities (predictable robot-environment relationships) into situation-specific structures. Using the AICON framework, regularities are represented as interacting processes in a differentiable network; sensory feedback realizes composition and gradient descent generates behavior. To isolate this mechanism, the authors test a simple simulated problem in which all relevant regularities are pre-identified in advance. The model produces context-appropriate behavior across a wide range of novel conditions except one case where the encoded regularities are provably insufficient. Ablations indicate the network automatically modulates regularity influence according to informativeness.
Significance. If the central result holds, the work supplies evidence that adaptive composition of pre-encoded regularities can serve as an inductive bias for generalization in behavior generation, reducing the need for exhaustive situation-specific design. The differentiable-network implementation and informativeness-based ablation are concrete strengths that allow direct inspection of the proposed mechanism. The restriction to a fully identifiable simulated domain, however, leaves open whether the same isolation is achievable in less controlled settings.
major comments (1)
- [Abstract] Abstract (experimental design paragraph): The claim that adaptive composition is isolated as the source of generalization rests on the premise that the hand-specified set of regularities is complete for every novel condition tested. Because the test domain is deliberately chosen so that 'all relevant regularities can be identified,' success in 'all but one case' is consistent with exhaustive prior coverage rather than with the adaptive-composition process itself. A load-bearing clarification would be an explicit argument or additional experiment showing that at least one tested condition requires a regularity combination that was not trivially present in the initial encoding.
minor comments (1)
- [Abstract] Abstract: the acronym AICON is introduced without expansion on first use; a parenthetical definition would aid readers.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. We address the major comment on the abstract and experimental design below, agreeing that an explicit clarification will strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract (experimental design paragraph): The claim that adaptive composition is isolated as the source of generalization rests on the premise that the hand-specified set of regularities is complete for every novel condition tested. Because the test domain is deliberately chosen so that 'all relevant regularities can be identified,' success in 'all but one case' is consistent with exhaustive prior coverage rather than with the adaptive-composition process itself. A load-bearing clarification would be an explicit argument or additional experiment showing that at least one tested condition requires a regularity combination that was not trivially present in the initial encoding.
Authors: We agree that an explicit argument is needed to isolate the role of adaptive composition. The regularities are general, identifiable relationships (e.g., basic robot-environment interactions) rather than pre-composed solutions for specific novel conditions. The tested novel conditions require dynamic, situation-specific combinations assembled on the fly via sensory feedback and gradient descent; these combinations are not trivially present as single encoded units. This is supported by the ablations demonstrating automatic modulation of regularity influence according to informativeness in each context, and by the single failure case where the regularities are provably insufficient. We will revise the abstract and add a clarifying paragraph (with reference to the test conditions) in the experimental design section of the revised manuscript. revision: yes
Circularity Check
No circularity: empirical demonstration on external simulation benchmark is self-contained
full rationale
The paper presents an empirical evaluation of the AICON framework on a deliberately restricted simulated problem chosen so that all relevant regularities can be pre-identified and encoded. The reported success rate (context-appropriate behavior in all but one case) and ablation findings on informativeness-based modulation are outcomes of running the network on novel conditions; they do not reduce by the paper's own equations or definitions to a fitted parameter or self-referential input. No load-bearing self-citation, uniqueness theorem, or ansatz smuggling is present in the provided text, and the central claim is tested against an external benchmark rather than derived from the mechanism itself.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Regularities are predictable relationships within the robot-environment system that can be represented as interacting processes in a differentiable network
invented entities (1)
-
AICON framework
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Representation Learning: A Review and New Perspectives,
Y . Bengio, A. Courville, and P. Vincent, “Representation Learning: A Review and New Perspectives,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 35, no. 8, pp. 1798–1828, 2013
2013
-
[2]
Challenging common assump- tions in the unsupervised learning of disentangled representations,
F. Locatello, S. Bauer, M. Lucicet al., “Challenging common assump- tions in the unsupervised learning of disentangled representations,” in International Conference on Machine Learning, 2019, pp. 4114–4124
2019
-
[3]
β-V AE: Learning basic visual concepts with a constrained variational framework,
I. Higgins, L. Matthey, A. Palet al., “ β-V AE: Learning basic visual concepts with a constrained variational framework,” inInternational Conference on Learning Representations, 2017, art. no. 5
2017
-
[4]
Learning World Models with Identifiable Factorization,
Y .-R. Liu, B. Huang, Z. Zhuet al., “Learning World Models with Identifiable Factorization,”Advances in Neural Information Processing Systems, pp. 31 831–31 864, 2023
2023
-
[5]
RoboDreamer: Learning Compositional World Models for Robot Imagination,
S. Zhou, Y . Du, J. Chenet al., “RoboDreamer: Learning Compositional World Models for Robot Imagination,” inInternational Conference on Machine Learning, 2024, pp. 61 885–61 896
2024
-
[6]
Generalization without Systematicity: On the Compositional Skills of Sequence-to-Sequence Recurrent Networks,
B. Lake and M. Baroni, “Generalization without Systematicity: On the Compositional Skills of Sequence-to-Sequence Recurrent Networks,” in International Conference on Machine Learning, 2018, pp. 2873–2882
2018
-
[7]
A robust layered control system for a mobile robot,
R. Brooks, “A robust layered control system for a mobile robot,”IEEE Journal on Robotics and Automation, vol. 2, no. 1, pp. 14–23, 1986
1986
-
[8]
Dynamical Movement Primitives: Learning Attractor Models for Motor Behaviors,
A. J. Ijspeert, J. Nakanishi, H. Hoffmann, P. Pastor, and S. Schaal, “Dynamical Movement Primitives: Learning Attractor Models for Motor Behaviors,”Neural Computation, vol. 25, no. 2, pp. 328–373, 2013
2013
-
[9]
Com- positional generalization from first principles,
T. Wiedemer, P. Mayilvahanan, M. Bethge, and W. Brendel, “Com- positional generalization from first principles,”Advances in Neural Information Processing Systems, pp. 6941–6960, 2023
2023
-
[10]
Auto-Encoding Variational Bayes,
D. P. Kingma and M. Welling, “Auto-Encoding Variational Bayes,” in International Conference on Learning Representations, 2014, art. no. 16
2014
-
[11]
Causal Curiosity: RL Agents Discovering Self-supervised Experiments for Causal Representation Learning,
S. A. Sontakke, A. Mehrjou, L. Itti, and B. Sch ¨olkopf, “Causal Curiosity: RL Agents Discovering Self-supervised Experiments for Causal Representation Learning,” inInternational Conference on Machine Learning, 2021, pp. 9848–9858
2021
-
[12]
An Information Processing Pattern from Robotics Predicts Properties of the Human Visual System,
A. Battaje, A. Godinez, N. M. Hanning, M. Rolfs, and O. Brock, “An Information Processing Pattern from Robotics Predicts Properties of the Human Visual System,” 2024, bioRxiv:2024.06.20.599814
2024
-
[13]
No Plan but Everything Under Control: Robustly Solving Sequential Tasks with Dynamically Composed Gradient Descent,
V . Mengers and O. Brock, “No Plan but Everything Under Control: Robustly Solving Sequential Tasks with Dynamically Composed Gradient Descent,” inIEEE International Conference on Robotics and Automation, 2025, pp. 90–96
2025
-
[14]
Lever- aging Uncertainty in Collective Opinion Dynamics with Heterogeneity,
V . Mengers, M. Raoufi, O. Brock, H. Hamann, and P. Romanczuk, “Lever- aging Uncertainty in Collective Opinion Dynamics with Heterogeneity,” Scientific Reports, vol. 14, art. no. 27314, 2024
2024
-
[15]
A Robotics- Inspired Scanpath Model Reveals the Importance of Uncertainty and Semantic Object Cues for Gaze Guidance in Dynamic Scenes,
V . Mengers, N. Roth, O. Brock, K. Obermayer, and M. Rolfs, “A Robotics- Inspired Scanpath Model Reveals the Importance of Uncertainty and Semantic Object Cues for Gaze Guidance in Dynamic Scenes,”Journal of Vision, vol. 25, no. 2, art. no. 6, 2025
2025
-
[16]
The Need for Biases in Learning Generalizations,
T. M. Mitchell, “The Need for Biases in Learning Generalizations,” 1980, Technical Report 00571, Rutgers University
1980
-
[17]
Mitchell,Machine Learning, 1st ed
T. Mitchell,Machine Learning, 1st ed. McGraw-Hill, Inc., 1997
1997
-
[18]
STRIPS: A New Approach to the Appli- cation of Theorem Proving to Problem Solving,
R. E. Fikes and N. J. Nilsson, “STRIPS: A New Approach to the Appli- cation of Theorem Proving to Problem Solving,”Artificial Intelligence, vol. 2, no. 3, pp. 189–208, 1971
1971
-
[19]
LaValle,Planning Algorithms
S. LaValle,Planning Algorithms. Cambridge University Press, 2006
2006
-
[20]
Sampling-Based Robot Motion Planning: A Review,
M. Elbanhawi and M. Simic, “Sampling-Based Robot Motion Planning: A Review,”IEEE Access, vol. 2, pp. 56–77, 2014
2014
-
[21]
Reactive Task and Motion Planning under Temporal Logic Specifications,
S. Li, D. Park, Y . Sung, J. A. Shah, and N. Roy, “Reactive Task and Motion Planning under Temporal Logic Specifications,” inIEEE International Conference on Robotics and Automation, 2021, pp. 12 618– 12 624
2021
-
[22]
Symbolic State Space Optimization for Long Horizon Mobile Manipulation Planning,
X. Zhang, Y . Zhu, Y . Dinget al., “Symbolic State Space Optimization for Long Horizon Mobile Manipulation Planning,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, 2023, pp. 866–872
2023
-
[23]
Task and Motion Planning for Execution in the Real,
T. Pan, R. Shome, and L. E. Kavraki, “Task and Motion Planning for Execution in the Real,”IEEE Transactions on Robotics, vol. 40, pp. 3356–3371, 2024
2024
-
[24]
The World Is Its Own Best Model: Robust Real-World Manipulation Through Online Behavior Selection,
M. Baum and O. Brock, “The World Is Its Own Best Model: Robust Real-World Manipulation Through Online Behavior Selection,” inIEEE International Conference on Robotics and Automation, 2022, pp. 1499– 1505
2022
-
[25]
Planning and acting in partially observable stochastic domains,
L. P. Kaelbling, M. Littman, and A. Cassandra, “Planning and acting in partially observable stochastic domains,”Artificial Intelligence, vol. 101, pp. 99–134, 1998
1998
-
[26]
Integrated task and motion planning in belief space,
L. P. Kaelbling and T. Lozano-Perez, “Integrated task and motion planning in belief space,”The International Journal of Robotics Research, vol. 32, no. 9-10, pp. 1194–1227, 2013
2013
-
[27]
Belief space planning assuming maximum likelihood observations,
R. Platt, R. Tedrake, L. Kaelbling, and T. Lozano-Perez, “Belief space planning assuming maximum likelihood observations,” inRobotics: Science and Systems, 2010, pp. 291–299
2010
-
[28]
Contingencies from Observations: Tractable Contingency Planning with Learned Behavior Models,
N. Rhinehart, J. He, C. Packeret al., “Contingencies from Observations: Tractable Contingency Planning with Learned Behavior Models,” in IEEE International Conference on Robotics and Automation, 2021, pp. 13 663–13 669
2021
-
[29]
A Tutorial on Visual Servo Control,
S. Hutchinson, G. D. Hager, and P. I. Corke, “A Tutorial on Visual Servo Control,”IEEE Transactions on Robotics and Automation, vol. 12, no. 5, pp. 651–670, 1996
1996
-
[30]
Real-time obstacle avoidance for manipulators and mobile robots,
O. Khatib, “Real-time obstacle avoidance for manipulators and mobile robots,”The International Journal of Robotics Research, vol. 5, no. 1, pp. 90–98, 1986
1986
-
[31]
Hybrid Vision-force Control for Robot with Uncertainties,
Y . Zhao and C. Cheah, “Hybrid Vision-force Control for Robot with Uncertainties,” inIEEE International Conference on Robotics and Automation, vol. 1, 2004, pp. 261–266 V ol.1
2004
-
[32]
Singularity-free Guiding Vector Field for Robot Navigation,
W. Yao, H. G. de Marina, B. Lin, and M. Cao, “Singularity-free Guiding Vector Field for Robot Navigation,”IEEE Transactions on Robotics, vol. 37, no. 4, pp. 1206–1221, 2021
2021
-
[33]
Model predictive control: Recent developments and future promise,
D. Q. Mayne, “Model predictive control: Recent developments and future promise,”Automatica, vol. 50, no. 12, pp. 2967–2986, 2014
2014
-
[34]
M. Bhardwaj, B. Sundaralingam, A. Mousavianet al., “STORM: An Integrated Framework for Fast Joint-Space Model-Predictive Control for Reactive Manipulation,”arXiv:2104.13542 [cs], 2021
-
[35]
Avoid Everything: Model-Free Collision Avoidance with Expert-Guided Fine-Tuning,
A. Fishman, A. Walsman, M. Bhardwajet al., “Avoid Everything: Model-Free Collision Avoidance with Expert-Guided Fine-Tuning,” in Conference on Robot Learning, 2025, pp. 1925–1948
2025
-
[36]
Diffusion policy: Visuomotor policy learning via action diffusion,
C. Chi, Z. Xu, S. Fenget al., “Diffusion policy: Visuomotor policy learning via action diffusion,”The International Journal of Robotics Research, vol. 44, no. 10-11, pp. 1684–1704, 2025
2025
-
[37]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal Policy Optimization Algorithms,” 2017, arXiv:1707.06347
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[38]
Neural Network Dynamics for Model-Based Deep Reinforcement Learning with Model- Free Fine-Tuning,
A. Nagabandi, G. Kahn, R. S. Fearing, and S. Levine, “Neural Network Dynamics for Model-Based Deep Reinforcement Learning with Model- Free Fine-Tuning,” inIEEE International Conference on Robotics and Automation, 2018, pp. 7559–7566
2018
-
[39]
How to train your robot with deep reinforcement learning: lessons we have learned,
J. Ibarz, J. Tan, C. Finnet al., “How to train your robot with deep reinforcement learning: lessons we have learned,”The International Journal of Robotics Research, vol. 40, no. 4-5, pp. 698–721, 2021
2021
-
[40]
PILCO: A Model-Based and Data-Efficient Approach to Policy Search,
M. Deisenroth and C. E. Rasmussen, “PILCO: A Model-Based and Data-Efficient Approach to Policy Search,” inInternational Conference on Machine Learning, 2011, pp. 465–472
2011
-
[41]
SE3-Pose-Nets: Structured Deep Dynamics Models for Visuomotor Control,
A. Byravan, F. Leeb, F. Meier, and D. Fox, “SE3-Pose-Nets: Structured Deep Dynamics Models for Visuomotor Control,” inIEEE International Conference on Robotics and Automation, 2018, pp. 3339–3346
2018
-
[42]
Goal-Conditioned End-to-End Visuomotor Control for Versatile Skill Primitives,
O. Groth, C.-M. Hung, A. Vedaldi, and I. Posner, “Goal-Conditioned End-to-End Visuomotor Control for Versatile Skill Primitives,” inIEEE International Conference on Robotics and Automation, 2021, pp. 1319– 1325
2021
-
[43]
Lost in latent space: Disentangled models and the challenge of com- binatorial generalisation,
M. L. Montero, J. S. Bowers, R. P. Costa, C. J. Ludwig, and G. Malhotra, “Lost in latent space: Disentangled models and the challenge of com- binatorial generalisation,”Advances in Neural Information Processing Systems, pp. 10 136–1049, 2022
2022
-
[44]
Demysti- fying Diffusion Policies: Action Memorization and Simple Lookup Table Alternatives,
C. He, X. Liu, G. S. Camps, G. Sartoretti, and M. Schwager, “Demysti- fying Diffusion Policies: Action Memorization and Simple Lookup Table Alternatives,” 2025, arXiv:2505.05787
-
[45]
Thrun, W
S. Thrun, W. Burgard, and D. Fox,Probablistic Robotics. MIT Press, 2005
2005
-
[46]
Differentiable Factor Graph Optimization for Learning Smoothers,
B. Yi, M. A. Lee, A. Kloss, R. Mart´ın-Mart´ın, and J. Bohg, “Differentiable Factor Graph Optimization for Learning Smoothers,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, 2021, pp. 1339–1345
2021
-
[47]
L. Feng, F. Tung, M. O. Ahmed, Y . Bengio, and H. Hajimirsadegh, “Were RNNs All We Needed?” 2024, arXiv:2410.01201
-
[48]
Koller and N
D. Koller and N. Friedman,Probabilistic Graphical Models: Principles and Techniques. MIT Press, 2009
2009
-
[49]
Factor Graphs for Robot Perception,
F. Dellaert and M. Kaess, “Factor Graphs for Robot Perception,” Foundations and Trends in Robotics, vol. 6, no. 1-2, pp. 1–139, 2017
2017
-
[50]
Understanding Belief Propagation and its Generalizations,
J. S. Yedidia, W. T. Freeman, and Y . Weiss, “Understanding Belief Propagation and its Generalizations,” inExploring Artificial Intelligence in the New Millennium, 2003, pp. 239–269
2003
-
[51]
Interacting Maps for Fast Visual Interpretation,
M. Cook, L. Gugelmann, F. Jug, C. Krautz, and A. Steger, “Interacting Maps for Fast Visual Interpretation,” inIEEE International Joint Conference on Neural Networks, 2011, pp. 770–776
2011
-
[52]
Toward Joint Approximate Inference of Visual Quantities on Cellular Processor Arrays,
J. N. P. Martel, M. Chau, P. Dudek, and M. Cook, “Toward Joint Approximate Inference of Visual Quantities on Cellular Processor Arrays,” inIEEE International Symposium on Circuits and Systems, 2015, pp. 2061–2064
2015
-
[53]
Learning to Simulate Complex Physics with Graph Networks,
A. Sanchez-Gonzalez, J. Godwin, T. Pfaffet al., “Learning to Simulate Complex Physics with Graph Networks,” inInternational Conference on Machine Learning, 2020, pp. 8459–8468
2020
-
[54]
Combining Motion and Appearance for Robust Probabilistic Object Segmentation in Real Time,
V . Mengers, A. Battaje, M. Baum, and O. Brock, “Combining Motion and Appearance for Robust Probabilistic Object Segmentation in Real Time,” inIEEE International Conference on Robotics and Automation, 2023, pp. 683–689
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.