FlipItRight: Stable Pose-Targeted Throw-Flip Across Diverse Objects
Pith reviewed 2026-06-28 14:39 UTC · model grok-4.3
The pith
Treating release states explicitly allows stable pose-targeted throw-flips on diverse objects without models or calibration.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
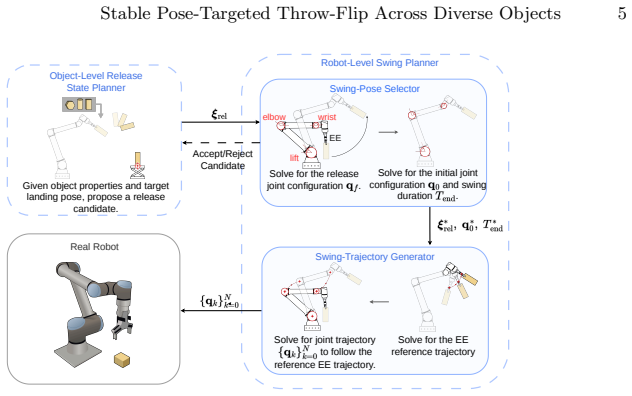
The framework generates candidate release states satisfying the desired landing pose at the object level and evaluates executability while constructing feasible swing motions at the robot level. Treating the release state explicitly enables principled candidate filtering, adaptive selection of configurations, and near-release motion with approximately constant end-effector velocities for robustness to release-timing uncertainty.
What carries the argument
Release state as explicit intermediate representation for bridging object landing requirements and robot swing execution.
If this is right
- Direct deployment on new objects and targets is possible without data collection or calibration.
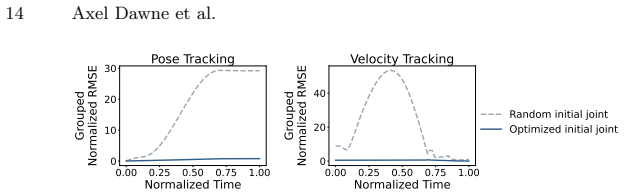
- Ablation studies show each design choice improves throwing performance.
- 90 percent success rate holds across objects varying in shape, size, and mass in 120 real trials.
- Approximately constant end-effector velocities during final swing enhance robustness to timing uncertainty.
Where Pith is reading between the lines
- Similar explicit intermediate states might simplify planning for other dynamic tasks like catching or batting.
- The planar assumption could be relaxed by extending release states to include 3D orientations and velocities.
- Integration with perception systems for online object property estimation would broaden applicability to unknown items.
Load-bearing premise
An explicit release state suffices to connect object-level landing predictions with robot-level motion constraints for stable execution.
What would settle it
Failure to achieve high success rates on a new set of objects with significantly different mass distributions or shapes, even after applying the planners, would indicate the need for environment-specific adjustments.
Figures
read the original abstract
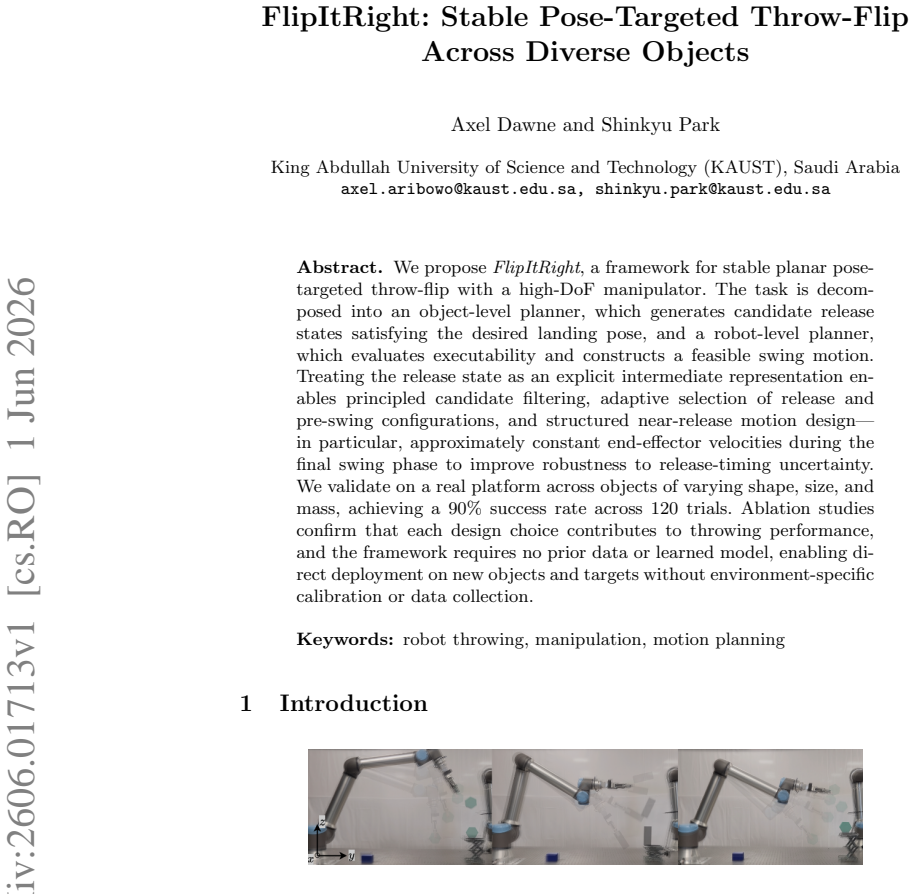
We propose FlipItRight, a framework for stable planar pose-targeted throw-flip with a high-DoF manipulator. The task is decomposed into an object-level planner, which generates candidate release states satisfying the desired landing pose, and a robot-level planner, which evaluates executability and constructs a feasible swing motion. Treating the release state as an explicit intermediate representation enables principled candidate filtering, adaptive selection of release and pre-swing configurations, and structured near-release motion design -- in particular, approximately constant end-effector velocities during the final swing phase to improve robustness to release-timing uncertainty. We validate on a real platform across objects of varying shape, size, and mass, achieving a 90% success rate across 120 trials. Ablation studies confirm that each design choice contributes to throwing performance, and the framework requires no prior data or learned model, enabling direct deployment on new objects and targets without environment-specific calibration or data collection.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
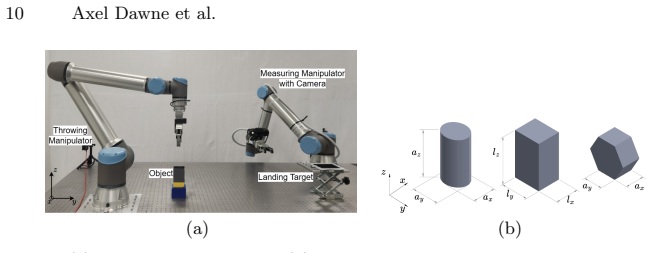
Summary. The paper presents FlipItRight, a model-based framework for stable planar pose-targeted throw-flip with a high-DoF manipulator. The task is split into an object-level planner generating candidate release states for a desired landing pose and a robot-level planner that checks executability and builds a swing trajectory, with emphasis on approximately constant end-effector velocity in the final phase to handle release-timing uncertainty. The framework uses no learned models or per-object calibration. Validation on a real robot across objects of varying shape, size, and mass reports a 90% success rate over 120 trials, with ablations supporting the design choices.
Significance. If the experimental results are reproducible with full protocol details, the explicit release-state representation and constant-velocity swing design offer a parameter-free, directly deployable method for non-prehensile throwing that generalizes without data collection. This could meaningfully advance model-based manipulation for diverse objects where learning-based alternatives require extensive training.
major comments (1)
- [Experimental Validation] Experimental section (or equivalent validation subsection): The central claim of 90% success across 120 trials on varied objects is load-bearing for the paper's contribution, yet the manuscript supplies no information on trial protocol, exact success criteria, failure-mode categorization, object parameter ranges, or statistical measures such as confidence intervals or per-object breakdowns. This prevents assessment of whether results reflect post-hoc selection or genuine robustness.
minor comments (2)
- [Abstract] The abstract states the 90% figure but omits any reference to the number of objects, their physical properties, or how trials were distributed; adding a brief quantitative summary would improve clarity without altering the technical content.
- [Method] Notation for release state and pre-swing configuration is introduced without an explicit diagram or table summarizing the variables; a small notation table would aid readability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the experimental validation. We agree that the reported 90% success rate requires fuller protocol details to allow proper assessment of robustness, and we will revise the manuscript to address this.
read point-by-point responses
-
Referee: [Experimental Validation] Experimental section (or equivalent validation subsection): The central claim of 90% success across 120 trials on varied objects is load-bearing for the paper's contribution, yet the manuscript supplies no information on trial protocol, exact success criteria, failure-mode categorization, object parameter ranges, or statistical measures such as confidence intervals or per-object breakdowns. This prevents assessment of whether results reflect post-hoc selection or genuine robustness.
Authors: We acknowledge that the current manuscript does not provide these details. In the revised version we will expand the experimental section (and any supplementary material) to include: (1) a complete trial protocol describing setup, number of repetitions per object/target, randomization procedures, and environmental conditions; (2) precise success criteria (e.g., final pose error thresholds for position and orientation together with stability requirements); (3) a categorized breakdown of failure modes observed across trials; (4) explicit ranges and distributions of object parameters (mass, dimensions, shape categories); and (5) statistical measures including per-object success rates, overall confidence intervals, and any relevant hypothesis testing. These additions will be placed in the main text or a dedicated validation subsection so that readers can evaluate the strength of the empirical claims. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper describes a model-based planner that generates release states from object dynamics and constructs swing motions with constant-velocity phases, validated directly via 120 real-robot trials at 90% success across varied objects with zero learned parameters or calibration. No equations, parameters, or claims reduce by construction to fitted inputs, self-definitions, or self-citation chains; the reported performance is tied to external physical execution rather than internal redefinition or renaming of results.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
In: 2009 IEEE International Conference on Robotics and Automation, pp
Mori, W., Ueda, J., Ogasawara, T.: 1-DOF dynamic pitching robot that indepen- dently controls velocity, Angular velocity, and direction of a ball: Contact models and motion planning. In: 2009 IEEE International Conference on Robotics and Automation, pp. 1655–1661. IEEE, Kobe (2009)
2009
-
[2]
In: 2009 IEEE International Conference on Robotics and Automation, pp
Miyashita, H., Yamawaki, T., Yashima, M.: Control for throwing manipulation by one joint robot. In: 2009 IEEE International Conference on Robotics and Automation, pp. 1273–1278. IEEE, Kobe (2009)
2009
-
[3]
Journal of System Design and Dynamics 5(1), 139–154 (2011)
Miyashita, H., Yamawaki, T., Yashima, M.: Parts Assembly and Sorting by Throw- ing Manipulation: Planning and Control. Journal of System Design and Dynamics 5(1), 139–154 (2011)
2011
-
[4]
In: 2015 IEEE International Conference on Robotics and Au- tomation (ICRA), pp
Sintov, A., Shapiro, A.: A stochastic dynamic motion planning algorithm for object-throwing. In: 2015 IEEE International Conference on Robotics and Au- tomation (ICRA), pp. 2475–2480. IEEE, Seattle, WA, USA (2015)
2015
-
[5]
IEEE Robotics & Automation Magazine29(3), 127–138 (2022)
Bombile, M., Billard, A.: Dual-Arm Control for Coordinated Fast Grabbing and Tossing of an Object: Proposing a New Approach. IEEE Robotics & Automation Magazine29(3), 127–138 (2022)
2022
-
[6]
In: 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp
Senoo, T., Namiki, A., Ishikawa, M.: High-speed throwing motion based on kinetic chain approach. In: 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3206–3211. IEEE, Nice (2008)
2008
-
[7]
International Journal of Computer and Information Engineering7(7), 937 – 945 (2013) 16 Axel Dawne et al
Gai, Y., Kobayashi, Y., Hoshino, Y., Emaru, T.: Motion control of a ball throw- ing robot with a flexible robotic arm. International Journal of Computer and Information Engineering7(7), 937 – 945 (2013) 16 Axel Dawne et al
2013
-
[8]
In: 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp
Pekarovskiy, A., Buss, M.: Optimal control goal manifolds for planar nonprehensile throwing. In: 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 4518–4524. IEEE, Tokyo (2013)
2013
-
[9]
IEEE Robotics and Automation Letters9(3), 2184–2191 (2024)
Zermane, A., Dehio, N., Kheddar, A.: Planning Impact-Driven Logistic Tasks. IEEE Robotics and Automation Letters9(3), 2184–2191 (2024)
2024
-
[10]
In: 2012 IEEE International Conference on Robotics and Automation, pp
Zhang, Y., Luo, J., Hauser, K.: Sampling-based motion planning with dynamic intermediate state objectives: Application to throwing. In: 2012 IEEE International Conference on Robotics and Automation, pp. 2551–2556. IEEE (2012)
2012
-
[11]
In: 2009 IEEE International Conference on Mechatronics, pp
Lombai, F., Szederkenyi, G.: Throwing motion generation using nonlinear opti- mization on a 6-degree-of-freedom robot manipulator. In: 2009 IEEE International Conference on Mechatronics, pp. 1–6. IEEE, Malaga, Spain (2009)
2009
-
[12]
Robotics and Autonomous Systems167, 104,481 (2023)
Bombile, M., Billard, A.: Bimanual dynamic grabbing and tossing of objects onto a moving target. Robotics and Autonomous Systems167, 104,481 (2023)
2023
-
[13]
, Chien, M.-C., Chang, Y.-J., Su, S.-H., Kai, C.-Y.: A ball-throwing robot with visual feedback
Hu, J.-S. , Chien, M.-C., Chang, Y.-J., Su, S.-H., Kai, C.-Y.: A ball-throwing robot with visual feedback. In: 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2511–2512. IEEE, Taipei (2010)
2010
-
[14]
In: 2022 IEEE/RSJ International Conference on Intelligent Robots and Sys- tems (IROS), pp
Liu, Y., Nayak, A., Billard, A.: A Solution to Adaptive Mobile Manipulator Throw- ing. In: 2022 IEEE/RSJ International Conference on Intelligent Robots and Sys- tems (IROS), pp. 1625–1632. IEEE, Kyoto, Japan (2022)
2022
-
[15]
IEEE Transactions on Automation Science and Engineering pp
Aslam, S., Kumar, K., Zhou, P., Yu, H., Wang, M.Y., She, Y.: DartBot: Overhand Throwing of Deformable Objects with Tactile Sensing and Reinforcement Learning. IEEE Transactions on Automation Science and Engineering pp. 1–1 (2025)
2025
-
[16]
Deep Predictive Policy Training using Reinforcement Learning
Ghadirzadeh, A., Maki, A., Kragic, D., Bj¨ orkman, M.: Deep Predictive Policy Training using Reinforcement Learning (2017). ArXiv:1703.00727 [cs]
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[17]
Werner, L., Nan, F., Eyschen, P., Spinelli, F.A., Yang, H., Hutter, M.: Dynamic Throwing with Robotic Material Handling Machines (2024). ArXiv:2405.19001 [cs]
-
[18]
In: 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp
Kober, J., Muelling, K., Peters, J.: Learning throwing and catching skills. In: 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 5167–5168 (2012)
2012
-
[19]
IEEE Robotics and Automation Letters 8(2), 576–583 (2023)
Monastirsky, M., Azulay, O., Sintov, A.: Learning to Throw With a Handful of Samples Using Decision Transformers. IEEE Robotics and Automation Letters 8(2), 576–583 (2023)
2023
-
[20]
In: 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Liu, Y., Costa, B.D., Billard, A.: Learning to throw-flip. In: 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE (2025)
2025
-
[21]
In: Pro- ceedings
Aboaf, E., Atkeson, C., Reinkensmeyer, D.: Task-level robot learning. In: Pro- ceedings. 1988 IEEE International Conference on Robotics and Automation, pp. 1309–1310. IEEE Comput. Soc. Press, Philadelphia, PA, USA (1988)
1988
-
[22]
In: 2023 IEEE International Conference on Robotics and Automation (ICRA), pp
Kasaei, H., Kasaei, M.: Throwing Objects into A Moving Basket While Avoiding Obstacles. In: 2023 IEEE International Conference on Robotics and Automation (ICRA), pp. 3051–3057. IEEE, London, United Kingdom (2023)
2023
-
[23]
IEEE Transactions on Robotics 36(4), 1307–1319 (2020)
Zeng, A., Song, S., Lee, J., Rodriguez, A., Funkhouser, T.: TossingBot: Learning to Throw Arbitrary Objects With Residual Physics. IEEE Transactions on Robotics 36(4), 1307–1319 (2020)
2020
-
[24]
IEEE Transactions on Robotics40, 3232–3251 (2024)
Chen, L., Lu, W., Zhang, K., Zhang, Y., Zhao, L., Zheng, Y.: TossNet: Learning to Accurately Measure and Predict Robot Throwing of Arbitrary Objects in Real Time With Proprioceptive Sensing. IEEE Transactions on Robotics40, 3232–3251 (2024)
2024
-
[25]
Springer-Verlag, Berlin (2006)
Nocedal, J., Wright, S.J.: Numerical Optimization, 2nd edn. Springer-Verlag, Berlin (2006)
2006
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.