A Simulation Platform for Flapping-Wing Vehicles
Pith reviewed 2026-06-28 14:23 UTC · model grok-4.3
The pith
FWAV-Sim is a Unity-based simulator that combines composite aerodynamics, fractal turbulence, and realistic sensors to support autonomy development for flapping-wing vehicles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
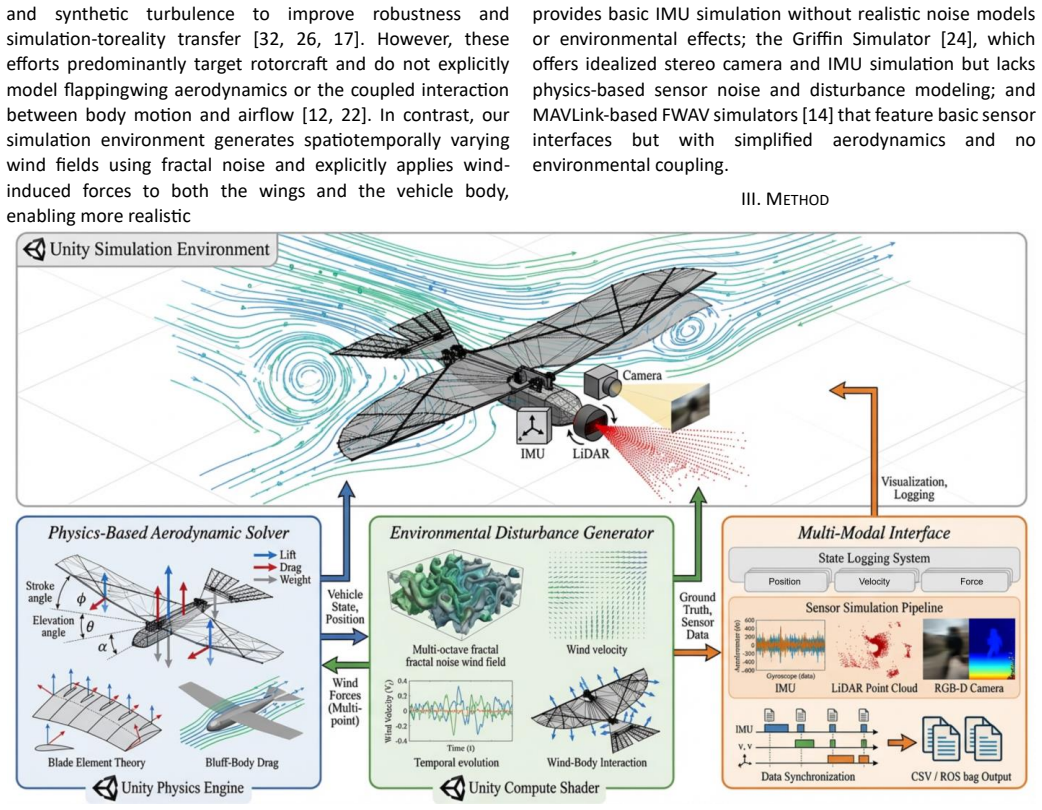
The authors introduce FWAV-Sim, a high-fidelity Unity-based simulation framework that integrates a composite aerodynamic model combining quasi-steady blade-element theory with bluff-body drag effects, spatiotemporally correlated turbulence generation through fractal noise synthesis, and realistic sensor simulation including noisy IMU measurements, LiDAR point clouds, and RGB camera feeds. The platform enables scalable generation of synchronized datasets containing ground-truth vehicle states, aerodynamic forces, turbulent wind fields, and multi-modal sensor streams. Experimental validation demonstrates that autonomy pipelines including both controllers and perception systems developed in FWA
What carries the argument
The FWAV-Sim framework, which integrates a composite aerodynamic model, fractal turbulence generator, and realistic multi-modal sensor simulation in a Unity environment to produce synchronized ground-truth datasets.
If this is right
- Autonomy controllers can be trained to handle turbulent aerodynamic disturbances more effectively.
- Perception systems can be developed and tested while accounting for realistic sensor noise and payload limits.
- Scalable synchronized datasets become available for training machine learning components on FWAV state estimation and control.
- Simulation-to-reality transfer improves for vehicles that are highly sensitive to wind disturbances.
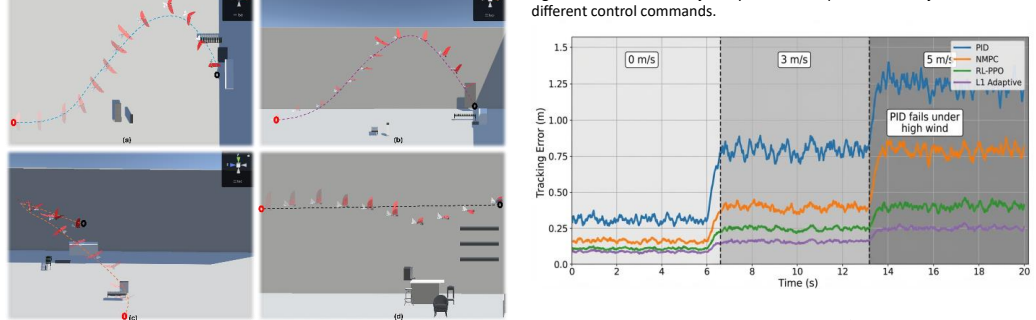
- Both control and perception pipelines exhibit better overall simulation capability as shown in the validation experiments.
Where Pith is reading between the lines
- The fractal turbulence generator could enable controlled testing of specific wind patterns that are difficult to reproduce outdoors.
- The Unity foundation may allow straightforward extension to other flapping or rotary aerial platforms with similar disturbance sensitivities.
- Standardized use of this simulator could create comparable benchmarks for different autonomy algorithms across research groups.
- Adding further sensor modalities such as event cameras would extend the platform's utility for low-latency perception tasks.
Load-bearing premise
The composite aerodynamic model, fractal turbulence generator, and sensor noise models are sufficiently faithful to real-world FWAV dynamics and sensing limitations that autonomy systems trained or tested inside the simulator will show measurably better real-world performance.
What would settle it
Real-world flight tests in which controllers and perception systems developed inside FWAV-Sim show no measurable performance gain over equivalent systems developed inside conventional simplified simulators.
Figures




read the original abstract
Flapping-wing aerial vehicles (FWAVs) demonstrate remarkable agility but face substantial autonomy challenges due to their high sensitivity to aerodynamic disturbances and limited sensor payload capacity. Current simulation platforms typically rely on oversimplified laminar flow assumptions and idealized sensor models, failing to capture the complex turbulence patterns and perceptual limitations encountered in real-world operation. This simulation-to-reality discrepancy significantly impedes the development of robust autonomy systems for FWAVs. We introduce FWAV-Sim, a high-fidelity Unity-based simulation framework that integrates: (1) a composite aerodynamic model combining quasi-steady blade-element theory with bluff-body drag effects, (2) spatiotemporally correlated turbulence generation through fractal noise synthesis, and (3) realistic sensor simulation including noisy IMU measurements, LiDAR point clouds, and RGB camera feeds. Our platform enables scalable generation of synchronized datasets containing ground-truth vehicle states, aerodynamic forces, turbulent wind fields, and multi-modal sensor streams. Experimental validation demonstrates that autonomy pipelines (including both controllers and perception systems) developed in FWAV-Sim exhibit significantly improved simulation capability, thereby advancing the outstanding performance in simulation-based development for flapping-wing aerial systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents FWAV-Sim, a Unity-based simulation framework for flapping-wing aerial vehicles. It combines a composite aerodynamic model (quasi-steady blade-element theory plus bluff-body drag), fractal-noise turbulence generation, and multi-modal sensor models (noisy IMU, LiDAR point clouds, RGB). The platform produces synchronized ground-truth datasets, and the abstract asserts that experimental validation shows autonomy pipelines (controllers and perception systems) developed inside FWAV-Sim achieve significantly improved performance over prior simulation-based approaches.
Significance. A well-validated high-fidelity FWAV simulator addressing turbulence and sensor realism could accelerate sim-to-real autonomy development in a domain where real-world testing is costly and risky. The platform description itself supplies a concrete set of modeling choices that future work could build upon, but the absence of any quantitative validation data means the claimed performance gains remain an assertion rather than a demonstrated result.
major comments (1)
- [Abstract] Abstract: The central claim that 'experimental validation demonstrates that autonomy pipelines ... developed in FWAV-Sim exhibit significantly improved simulation capability' is unsupported. No metrics, baselines, real-world flight data, ablation results, exclusion criteria, or experimental protocol are supplied anywhere in the manuscript to substantiate the asserted sim-to-real transfer gains.
minor comments (1)
- [Abstract] The phrase 'significantly improved simulation capability' is ambiguous; it is unclear whether the improvement is claimed for the simulator fidelity itself or for the autonomy systems trained inside it.
Simulated Author's Rebuttal
We thank the referee for the thorough review and for identifying the unsupported claim in the abstract. We address this point directly below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that 'experimental validation demonstrates that autonomy pipelines ... developed in FWAV-Sim exhibit significantly improved simulation capability' is unsupported. No metrics, baselines, real-world flight data, ablation results, exclusion criteria, or experimental protocol are supplied anywhere in the manuscript to substantiate the asserted sim-to-real transfer gains.
Authors: We agree that the abstract's assertion of experimental validation and significantly improved performance is not supported by any quantitative results, metrics, baselines, or protocols in the manuscript. The current text describes the modeling components, turbulence generation, sensor models, and dataset generation capabilities but does not contain the claimed validation experiments. We will revise the abstract to remove this unsupported claim and instead accurately describe the platform's contributions to high-fidelity simulation and synchronized ground-truth data generation. No performance comparisons or sim-to-real transfer results will be asserted. revision: yes
Circularity Check
No circularity: platform description with no derivations or self-referential predictions
full rationale
The paper introduces FWAV-Sim as a simulation framework combining existing modeling techniques (quasi-steady blade-element theory, fractal noise, sensor models) without any claimed derivations, fitted parameters renamed as predictions, or load-bearing self-citations. The abstract's validation claim is an assertion of improved performance but does not reduce any result to its own inputs by construction, nor invoke uniqueness theorems or ansatzes from prior author work. No equations or prediction steps are present that could exhibit the enumerated circular patterns.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The quasi-steady blade-element theory combined with bluff-body drag sufficiently models FWAV aerodynamics
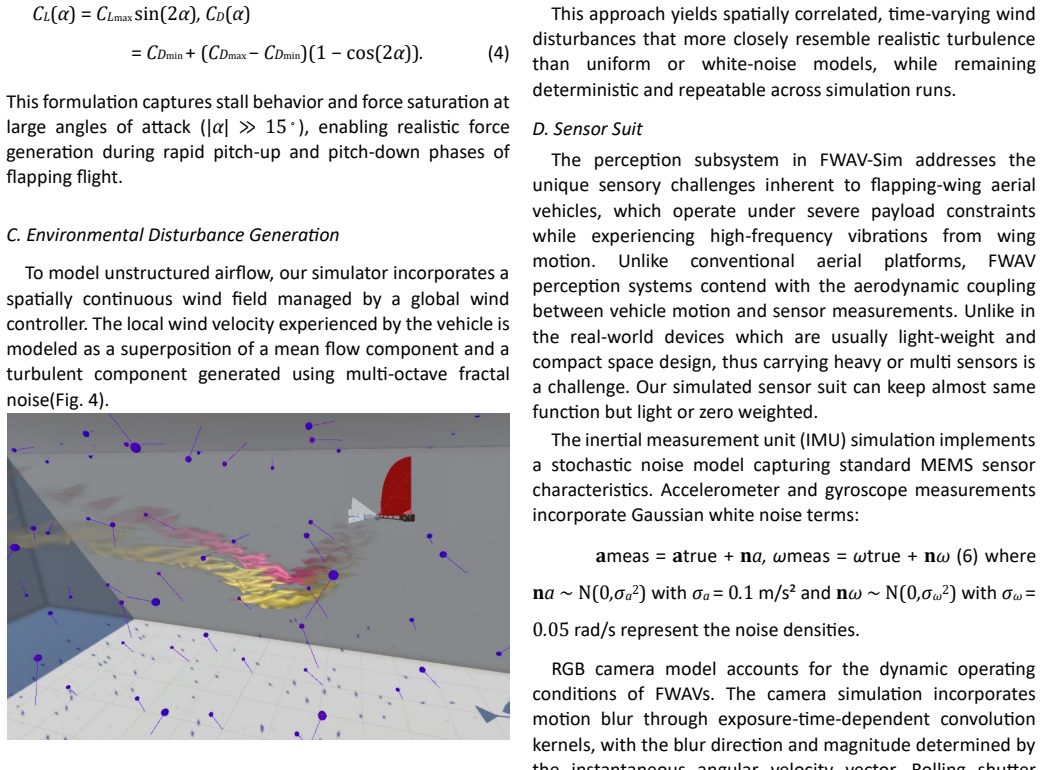
- domain assumption Fractal noise synthesis produces spatiotemporally correlated turbulence representative of real atmospheric conditions
Reference graph
Works this paper leans on
-
[1]
The blackbird dataset: A large -scale dataset for uav perception in aggressive flight, 2018
Amado Antonini, Winter Guerra, Varun Murali, Thomas Sayre-McCord, and Sertac Karaman. The blackbird dataset: A large -scale dataset for uav perception in aggressive flight, 2018. URL https://arxiv.org/abs/1810. 01987
2018
-
[2]
Dynamic stability and flight control of biomimetic flapping-wing micro air vehicle
Muhammad Yousaf Bhatti, Sang -Gil Lee, and Jae -Hung Han. Dynamic stability and flight control of biomimetic flapping-wing micro air vehicle. Aerospace, 8(12), 2021. ISSN 2226 -4310. doi: 10.3390/aerospace8120362. URL https://www.mdpi.com/2226-4310/8/12/362
-
[3]
The euroc micro aerial vehicle datasets
Michael Burri, Janosch Nikolic, Pascal Gohl, Thomas Schneider, Joern Rehder, Sammy Omari, Markus W Achtelik, and Roland Siegwart. The euroc micro aerial vehicle datasets. The International Journal of Robotics Research, 35(10):1157 –1163, 2016. doi: 10. 1177/0278364915620033. URL https://doi.org/10.1177/ 0278364915620033
2016
-
[4]
Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation
Liang-Chieh Chen, Yukun Zhu, George Papandreou, Florian Schroff, and Hartwig Adam. Encoder -decoder with atrous separable convolution for semantic image segmentation, 2018. URL https://arxiv.org/abs/1802.02611
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[5]
Turbulence modelling applied to aircraft wake vortex study
Moldoveanu Cristian -Emil, Moraru Florentin, Somoiag Pamfil, Henri Boisson, and Andre Giovannini. Turbulence modelling applied to aircraft wake vortex study. MTA Review, XXI, 01 2011
2011
-
[6]
G.C.H.E. de Croon, K.M.E. de Clercq, R. Ruijsink, B. Remes, and C. de Wagter. Design, aerodynamics, and vision - based control of the delfly. International Journal of Micro Air Vehicles , 1(2):71 –97, 2009. doi: 10.1260/175682909789498288. URL https://doi.org/10. 1260/175682909789498288
-
[7]
Are we ready for autonomous drone racing? the UZH-FPV drone racing dataset
Jeffrey Delmerico, Titus Cieslewski, Henri Rebecq, Matthias Faessler, and Davide Scaramuzza. Are we ready for autonomous drone racing? the UZH-FPV drone racing dataset. In IEEE Int. Conf. Robot. Autom. (ICRA), 2019
2019
-
[8]
The aerodynamics of hovering insect flight
Charles Porter Ellington. The aerodynamics of hovering insect flight. i. the quasi -steady analysis. Philosophical Transactions of the Royal Society of London. B, Biological Sciences, 305(1122):1–15, 02 1984. ISSN 0080-4622. doi: 10.1098/rstb.1984.0049. URL https: //doi.org/10.1098/rstb.1984.0049
-
[9]
Flappy Hummingbird: An Open Source Dynamic Simulation of Flapping Wing Robots and Animals
Fan Fei, Zhan Tu, Yilun Yang, Jian Zhang, and Xinyan Deng. Flappy hummingbird: An open source dynamic simulation of flapping wing robots and animals, 2019. URL https://arxiv.org/abs/1902.09628
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[10]
Winter Guerra, Ezra Tal, Varun Murali, Gilhyun Ryou, and Sertac Karaman. Flightgoggles: Photorealistic sensor simulation for perception -driven robotics using photogrammetry and virtual reality. In 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages 6941 –6948, 2019. doi: 10.1109/ IROS40897.2019.8968116
-
[11]
Aerodynamic efficiency explains flapping strategies used by birds
L Christoffer Johansson. Aerodynamic efficiency explains flapping strategies used by birds. Proceedings of the National Academy of Sciences , 121(46): e2410048121, 2024
2024
-
[12]
Elia Kaufmann, Antonio Loquercio, Rene´ Ranftl, Matthias Muller, Vladlen Koltun, and Davide Scara -¨ muzza. Deep drone acrobatics, 2020. URL https: //arxiv.org/abs/2006.05768
-
[13]
Development of the Nano Hummingbird: A Tailless Flapping Wing Micro Air Vehicle
Matthew Keennon, Karl Klingebiel, and Henry Won. Development of the Nano Hummingbird: A Tailless Flapping Wing Micro Air Vehicle . doi: 10.2514/6.2012 -
-
[14]
URL https://arc.aiaa.org/doi/abs/10.2514/6.2012- 588
-
[15]
J. M. Kok and J. S. Chahl. A low -cost simulation platform for flapping wing MAVs. In Akhlesh Lakhtakia, Mato Knez, and Raul J. Mart´ ´ın -Palma, editors, Bioinspiration, Biomimetics, and Bioreplication 2015, volume 9429, page 94290L. International Society for Optics and Photonics, SPIE, 2015. doi: 10.1117/12.2084142. URL https://doi.org/10.1117/12.2084142
-
[16]
PointPillars: Fast Encoders for Object Detection from Point Clouds
Alex H. Lang, Sourabh Vora, Holger Caesar, Lubing Zhou, Jiong Yang, and Oscar Beijbom. Pointpillars: Fast encoders for object detection from point clouds, 2019. URL https://arxiv.org/abs/1812.05784
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[17]
Stable flight of a flapping-wing micro air vehicle under wind disturbance
Jonggu Lee, Seungwan Ryu, and H Jin Kim. Stable flight of a flapping-wing micro air vehicle under wind disturbance. IEEE Robotics and Automation Letters , 5 (4):5685 –5692, 2020
2020
-
[18]
Deep drone racing: From simulation to reality with domain randomization
Antonio Loquercio, Elia Kaufmann, Rene Ranftl, Alexey´ Dosovitskiy, Vladlen Koltun, and Davide Scaramuzza. Deep drone racing: From simulation to reality with domain randomization. IEEE Transactions on Robotics , 36(1):1–14, 2020. doi: 10.1109/TRO.2019.2942989
-
[19]
Ma, Pakpong Chirarattananon, Sawyer B
Kevin Y . Ma, Pakpong Chirarattananon, Sawyer B. Fuller, and Robert J. Wood. Controlled flight of a biologically inspired, insect-scale robot. Science, 340(6132):603–607,
-
[20]
doi: 10.1126/science. 1231806. URL https://www.science.org/doi/abs/10.1126/ science.1231806
-
[21]
A review of flapping wing mav modelling
Victor Mwenda Mwongera. A review of flapping wing mav modelling. Int. J. Aeronaut. Sci. Aerosp. Res, 2(2): 27– 36, 2015
2015
-
[22]
Development and flight performance of a biologically -inspired tailless flapping-wing micro air vehicle with wing stroke plane modulation
Quoc-Viet Nguyen and Woei Leong Chan. Development and flight performance of a biologically -inspired tailless flapping-wing micro air vehicle with wing stroke plane modulation. Bioinspiration & biomimetics, 14(1): 016015, 2018
2018
-
[23]
Christopher T. Orlowski and Anouck R. Girard. Dynamics, stability, and control analyses of flapping wing micro -air vehicles. Progress in Aerospace Sciences, 51:18–30, 2012. ISSN 0376 -0421. doi: https://doi.org/10.1016/j.paerosci.2012.01.001. URL https://www.sciencedirect.com/science/article/pii/ S0376042112000103
-
[24]
Neural-fly enables rapid learning for agile flight in strong winds
Michael O’Connell, Guanya Shi, Xichen Shi, Kamyar Azizzadenesheli, Anima Anandkumar, Yisong Yue, and Soon-Jo Chung. Neural-fly enables rapid learning for agile flight in strong winds. Science Robotics, 7(66): eabm6597, 2022
2022
-
[25]
Vins -mono: A robust and versatile monocular visual -inertial state estimator
Tong Qin, Peiliang Li, and Shaojie Shen. Vins -mono: A robust and versatile monocular visual -inertial state estimator. IEEE transactions on robotics , 34(4):1004 – 1020, 2018
2018
-
[26]
The griffin perception dataset: Bridging the gap between flapping-wing flight and robotic perception
Juan Pablo Rodr´ıguez -Gomez, Raul Tapia, Julio L´ Paneque, Pedro Grau, Augusto Gomez´ Egu´ıluz, Jose Ramiro Mart´ınez -de Dios, and Anibal Ollero. The griffin perception dataset: Bridging the gap between flapping-wing flight and robotic perception. IEEE Robotics and Automation Letters, 6(2):1066–1073, 2021
2021
-
[27]
U-Net: Convolutional Networks for Biomedical Image Segmentation
Olaf Ronneberger, Philipp Fischer, and Thomas Brox. Unet: Convolutional networks for biomedical image segmentation, 2015. URL https://arxiv.org/abs/1505.04597
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[28]
CAD2RL: Real Single-Image Flight without a Single Real Image
Fereshteh Sadeghi and Sergey Levine. Cad2rl: Real single- image flight without a single real image, 2017. URL https://arxiv.org/abs/1611.04201
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[29]
Sanjay P . Sane. The aerodynamics of insect flight. Journal of Experimental Biology , 206(23):4191–4208, 12
-
[30]
ISSN 0022 -0949. doi: 10.1242/jeb.00663. URL https://doi.org/10.1242/jeb.00663
-
[31]
AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles
Shital Shah, Debadeepta Dey, Chris Lovett, and Ashish Kapoor. Airsim: High -fidelity visual and physical simulation for autonomous vehicles, 2017. URL https: //arxiv.org/abs/1705.05065
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[32]
Pvrcnn: Point - voxel feature set abstraction for 3d object detection,
Shaoshuai Shi, Chaoxu Guo, Li Jiang, Zhe Wang, Jianping Shi, Xiaogang Wang, and Hongsheng Li. Pvrcnn: Point - voxel feature set abstraction for 3d object detection,
- [33]
-
[34]
An introduction to flapping wing aerodynamics , volume
Wei Shyy, Hikaru Aono, Chang -kwon Kang, and Hao Liu. An introduction to flapping wing aerodynamics , volume
-
[35]
Cambridge University Press, 2013
2013
-
[36]
Haithem Taha, Muhammad R. Hajj, and Ali Nayfeh. Flight dynamics and control of flapping-wing mavs: A review. Nonlinear Dynamics, 70, 10 2012. doi: 10.1007/s11071-012-0529-5
-
[37]
Domain Randomization for Transferring Deep Neural Networks from Simulation to the Real World
Josh Tobin, Rachel Fong, Alex Ray, Jonas Schneider, Wojciech Zaremba, and Pieter Abbeel. Domain randomization for transferring deep neural networks from simulation to the real world, 2017. URL https://arxiv. org/abs/1703.06907
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[38]
Z. Jane Wang. Dissecting insect flight. Annual Review of Fluid Mechanics , 37(Volume 37, 2005):183 –210, 2005. ISSN 1545 -4479. doi: https://doi.org/10.1146/annurev.fluid.36.050802.12194 0. URL https://www.annualreviews.org/content/journals/10. 1146/annurev.fluid.36.050802.121940
-
[39]
Wood, Benjamin Finio, Michael Karpelson, Nestor O
Robert J. Wood, Benjamin Finio, Michael Karpelson, Nestor O. Perez -Arancibia, Pratheev Sreetharan, and´ John P . Whitney. Challenges for micro-scale flappingwing micro air vehicles. In Thomas George, M. Saif Islam, and Achyut Dutta, editors, Micro- and Nanotechnology Sensors, Systems, and Applications IV, volume 8373, page 83731J. International Society f...
-
[40]
Enze Xie, Wenhai Wang, Zhiding Yu, Anima Anandkumar, Jose M. Alvarez, and Ping Luo. Segformer: Simple and efficient design for semantic segmentation with transformers, 2021. URL https://arxiv.org/abs/2105.15203
-
[41]
Fast-lio2: Fast direct lidar-inertial odometry
Wei Xu, Yixi Cai, Dongjiao He, Jiarong Lin, and Fu Zhang. Fast-lio2: Fast direct lidar-inertial odometry. IEEE Transactions on Robotics, 38(4):2053–2073, 2022
2053
-
[42]
Second: Sparsely embedded convolutional detection
Yan Yan, Yuxing Mao, and Bo Li. Second: Sparsely embedded convolutional detection. Sensors, 18(10),
-
[43]
Sen- sors18(10) (2018).https://doi.org/10.3390/s18103337
ISSN 1424 -8220. doi: 10.3390/s18103337. URL https://www.mdpi.com/1424-8220/18/10/3337
-
[44]
URL https://arxiv.org/abs/2006.11275
Tianwei Yin, Xingyi Zhou, and Philipp Krahenb¨ uhl.¨ Center-based 3d object detection and tracking, 2021. URL https://arxiv.org/abs/2006.11275
-
[45]
Pyramid scene parsing network,
Hengshuang Zhao, Jianping Shi, Xiaojuan Qi, Xiaogang Wang, and Jiaya Jia. Pyramid scene parsing network,
-
[46]
URL https://arxiv.org/abs/1612.01105
work page internal anchor Pith review Pith/arXiv arXiv
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.