A constrained symbolic regression approach for Lyapunov function discovery
Pith reviewed 2026-06-27 15:13 UTC · model grok-4.3
The pith
Constrained symbolic regression discovers valid Lyapunov functions for autonomous dynamical systems without assuming their form.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that formulating Lyapunov function discovery as a constrained self-supervised symbolic regression problem with expression trees of fixed depth and solving it with a branch-and-bound-and-check procedure discovers valid Lyapunov functions for autonomous dynamical systems without a priori assumptions on functional form, as demonstrated on several case studies.
What carries the argument
Constrained symbolic regression on fixed-depth expression trees whose objective directly encodes both function values and the two Lyapunov stability conditions, solved by branch-and-bound-and-check.
If this is right
- The approach applies in principle to any continuous dynamical system.
- Discovered functions appear in explicit symbolic form and are therefore directly interpretable.
- No assumption about the shape of the Lyapunov function is required before the search begins.
- The branch-and-bound-and-check procedure makes the combinatorial search tractable for the tested examples.
Where Pith is reading between the lines
- The same constraint-encoding idea could be tried on systems that include control inputs or external disturbances.
- Hybrid schemes that first use the symbolic method on low-dimensional subsystems and then refine with other techniques become conceivable.
- Automated generation of stability certificates might shorten the design loop in control applications where manual Lyapunov construction is currently required.
Load-bearing premise
The two Lyapunov stability conditions can be written as hard constraints inside the symbolic regression objective without ruling out all workable functions or requiring separate verification that the returned expression works everywhere.
What would settle it
A concrete continuous autonomous system that is known to possess a Lyapunov function but for which the solver returns either no feasible expression or an expression whose derivative along trajectories is positive at some tested point.
Figures

read the original abstract
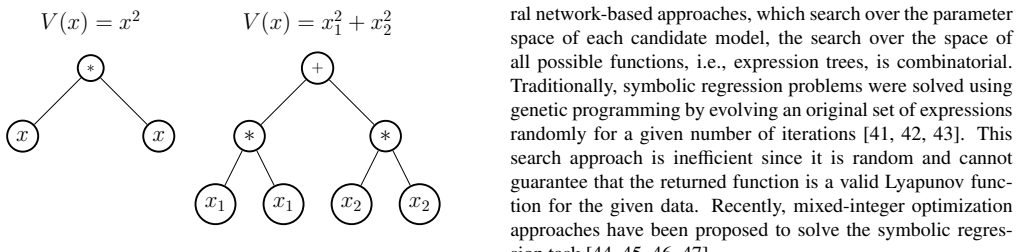
In this paper, we consider the data-driven discovery of Lyapunov functions for autonomous dynamical systems. We represent the Lyapunov function as an expression tree of fixed depth and formulate the Lyapunov discovery task as a constrained self-supervised symbolic regression problem. The constraints model the output of the Lyapunov function for a given input as well as the Lyapunov stability conditions. This modeling approach makes no a priori assumptions about the functional form of the Lyapunov function, is inherently interpretable since the function is obtained in a symbolic form, and, in principle, can be applied to any continuous dynamical system. We also develop a tailored branch-and-bound-and-check solution approach to efficiently solve the resulting learning task. Applications to several case studies show the ability of the proposed approach to discover Lyapunov functions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a constrained symbolic regression approach for discovering Lyapunov functions in autonomous dynamical systems. Lyapunov functions are represented as expression trees of fixed depth, and the discovery is cast as a constrained self-supervised symbolic regression problem where constraints encode the function values and the Lyapunov stability conditions (positive definiteness and negative derivative along trajectories). A branch-and-bound-and-check solver is developed to solve the resulting optimization problem, and the method is demonstrated on several case studies.
Significance. Should the approach reliably produce functions that satisfy the Lyapunov conditions globally, it would represent a notable advance in data-driven methods for stability analysis, eliminating the need for a priori functional form assumptions and providing interpretable symbolic expressions. The development of a tailored solver for the constrained problem is a technical strength.
major comments (2)
- [Abstract] Abstract: The central claim that the method discovers valid Lyapunov functions (i.e., satisfying V(x)>0 and ˙V(x)<0 everywhere in a region) rests on the encoding of stability conditions as constraints. However, the abstract provides no information on whether these constraints are enforced only at discrete sample points or guaranteed symbolically over the continuum; satisfaction at samples does not imply global validity for continuous systems, which is load-bearing for the no-post-hoc-verification assertion.
- [Abstract] Abstract: No quantitative metrics (e.g., verification success rates over dense grids, comparison against baselines such as sum-of-squares or neural Lyapunov methods) are reported for the case studies. This absence makes it impossible to assess whether the discovered expressions actually meet the Lyapunov conditions beyond the training samples, directly undermining the claim of effective discovery.
minor comments (1)
- The abstract could briefly specify the dynamical systems used in the case studies (e.g., dimension, nonlinearity type) to contextualize the demonstrations.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on the abstract. We address each point below and will revise the manuscript accordingly to improve clarity and strengthen the presentation of results.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the method discovers valid Lyapunov functions (i.e., satisfying V(x)>0 and ˙V(x)<0 everywhere in a region) rests on the encoding of stability conditions as constraints. However, the abstract provides no information on whether these constraints are enforced only at discrete sample points or guaranteed symbolically over the continuum; satisfaction at samples does not imply global validity for continuous systems, which is load-bearing for the no-post-hoc-verification assertion.
Authors: We agree that the abstract should clarify the nature of the constraints. In the proposed approach, the Lyapunov conditions are encoded as constraints evaluated at a finite collection of sampled points in the state space. The optimization therefore enforces the conditions only at these discrete locations rather than providing a symbolic guarantee over the continuum. We will revise the abstract to explicitly note this sample-based enforcement and indicate that global validity requires separate verification (e.g., on a dense grid). This revision will also remove any implication of automatic global validity without post-discovery checks. revision: yes
-
Referee: [Abstract] Abstract: No quantitative metrics (e.g., verification success rates over dense grids, comparison against baselines such as sum-of-squares or neural Lyapunov methods) are reported for the case studies. This absence makes it impossible to assess whether the discovered expressions actually meet the Lyapunov conditions beyond the training samples, directly undermining the claim of effective discovery.
Authors: We concur that quantitative evaluation metrics are needed to substantiate the claims. In the revised version we will augment the case-study section with verification success rates computed on dense grids (distinct from the training samples) and will include direct numerical comparisons against sum-of-squares and neural-Lyapunov baselines for the reported examples. revision: yes
Circularity Check
No significant circularity; method is a novel constrained optimization formulation
full rationale
The paper defines Lyapunov discovery as a constrained self-supervised symbolic regression task on fixed-depth expression trees, with stability conditions encoded directly as constraints in the objective and solved via a custom branch-and-bound-and-check procedure. No derivation step reduces the claimed discovery of valid Lyapunov functions to a fitted parameter renamed as prediction, a self-citation chain, or an ansatz smuggled from prior work by the same authors. The central claim rests on the solver's ability to produce symbolic expressions satisfying the encoded inequalities at the modeled points, which is independent of the target stability properties and does not presuppose the functional form or the final result. This is a standard new-method presentation with no load-bearing self-referential reduction.
Axiom & Free-Parameter Ledger
free parameters (1)
- expression tree depth
axioms (1)
- domain assumption The dynamical system is autonomous and continuous
Forward citations
Cited by 1 Pith paper
-
Symbolic Discovery of Iterative Algorithms: A Continuous Latent Space Bayesian Optimization Framework
A VAE-plus-Bayesian-optimization framework discovers new symbolic iterative optimization algorithms without assuming update function forms and faster than prior mathematical programming methods.
Reference graph
Works this paper leans on
-
[1]
H. K. Khalil, J. W. Grizzle, Nonlinear systems, V ol. 3, Prentice hall Upper Saddle River, NJ, 2002
2002
-
[2]
E. D. Sontag, A ‘universal’construction of artstein’s theo- rem on nonlinear stabilization, Systems & control letters 13 (2) (1989) 117–123
1989
-
[3]
Grimm, M
G. Grimm, M. J. Messina, S. E. Tuna, A. R. Teel, Model predictive control: For want of a local control Lyapunov function, all is not lost, IEEE Transactions on Automatic Control 50 (5) (2005) 546–558
2005
-
[4]
Heidarinejad, J
M. Heidarinejad, J. Liu, P. D. Christofides, Economic model predictive control of nonlinear process systems us- ing lyapunov techniques, AIChE Journal 58 (3) (2012) 855–870
2012
-
[5]
Y . Chow, O. Nachum, E. Duenez-Guzman, M. Ghavamzadeh, A lyapunov-based approach to safe reinforcement learning, Advances in neural information processing systems 31 (2018)
2018
-
[6]
E. D. Sontag, Mathematical control theory: deterministic finite dimensional systems, Springer, 1998
1998
-
[7]
W. M. Haddad, V . Chellaboina, Nonlinear dynamical sys- tems and control: a Lyapunov-based approach, Princeton University Press, 2008
2008
-
[8]
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, P. Tabuada, Control barrier functions: The- ory and applications, in: 18th European Control Confer- ence (ECC), Ieee, 2019, pp. 3420–3431
2019
-
[9]
Tsukamoto, S.-J
H. Tsukamoto, S.-J. Chung, J.-J. E. Slotine, Contraction theory for nonlinear stability analysis and learning-based control: A tutorial overview, Annual Reviews in Control 52 (2021) 135–169
2021
-
[10]
Gurel, L
O. Gurel, L. Lapidus, A guide to methods for the gen- eration of liapunov functions, Industrial & Engineering Chemistry 61 (3) (1969) 30–41
1969
-
[11]
Giesl, S
P. Giesl, S. Hafstein, Review on computational methods for lyapunov functions, Discrete and Continuous Dynam- ical Systems-B 20 (8) (2015) 2291–2331
2015
-
[12]
W. Tang, P. Daoutidis, A bilevel programming approach to the convergence analysis of control-lyapunov functions, IEEE Transactions on Automatic Control 64 (10) (2019) 4174–4179
2019
-
[13]
W. Tang, P. Daoutidis, Optimal design of control- lyapunov functions by semi-infinite stochastic program- ming, in: 2023 62nd IEEE Conference on Decision and Control (CDC), IEEE, 2023, pp. 7277–7284
2023
-
[14]
Papachristodoulou, S
A. Papachristodoulou, S. Prajna, On the construction of lyapunov functions using the sum of squares decomposi- tion, in: Proceedings of the 41st IEEE Conference on De- cision and Control, 2002., V ol. 3, IEEE, 2002, pp. 3482– 3487
2002
-
[15]
Goubault, J.-H
E. Goubault, J.-H. Jourdan, S. Putot, S. Sankara- narayanan, Finding non-polynomial positive invariants and lyapunov functions for polynomial systems through darboux polynomials, in: 2014 American Control Confer- ence, IEEE, 2014, pp. 3571–3578
2014
-
[16]
Julian, J
P. Julian, J. Guivant, A. Desages, A parametrization of piecewise linear lyapunov functions via linear program- ming, International Journal of Control 72 (7-8) (1999) 702–715
1999
-
[17]
S. F. Marinósson, Lyapunov function construction for or- dinary differential equations with linear programming, Dynamical Systems: An International Journal 17 (2) (2002) 137–150
2002
-
[18]
Björnsson, P
J. Björnsson, P. Giesl, S. Hafstein, C. M. Kellett, H. Li, Computation of continuous and piecewise affine lyapunov functions by numerical approximations of the massera construction, in: 53rd IEEE Conference on Decision and Control, IEEE, 2014, pp. 5506–5511
2014
-
[19]
T. A. Johansen, Computation of lyapunov functions for smooth nonlinear systems using convex optimization, Au- tomatica 36 (11) (2000) 1617–1626
2000
-
[20]
Giesl, Construction of a local and global lyapunov function for discrete dynamical systems using radial ba- sis functions, Journal of Approximation Theory 153 (2) (2008) 184–211
P. Giesl, Construction of a local and global lyapunov function for discrete dynamical systems using radial ba- sis functions, Journal of Approximation Theory 153 (2) (2008) 184–211
2008
-
[21]
M. A. Ben Sassi, S. Sankaranarayanan, X. Chen, E. Ábrahám, Linear relaxations of polynomial positivity for polynomial lyapunov function synthesis, IMA Journal of Mathematical Control and Information 33 (3) (2016) 723–756
2016
-
[22]
Ratschan, Z
S. Ratschan, Z. She, Providing a basin of attraction to a target region of polynomial systems by computation of lyapunov-like functions, SIAM Journal on Control and Optimization 48 (7) (2010) 4377–4394
2010
-
[23]
Z. Li, I. Mitrai, Learning interpretable and stable dynam- ical models via mixed-integer lyapunov-constrained opti- mization, arXiv preprint arXiv:2604.07611 (2026). 10
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[24]
Petridis, S
V . Petridis, S. Petridis, Construction of neural network based lyapunov functions, in: The 2006 IEEE Interna- tional Joint Conference on Neural Network Proceedings, IEEE, 2006, pp. 5059–5065
2006
-
[25]
Serpen, Empirical approximation for lyapunov func- tions with artificial neural nets, in: Proceedings
G. Serpen, Empirical approximation for lyapunov func- tions with artificial neural nets, in: Proceedings. 2005 IEEE International Joint Conference on Neural Networks, 2005., V ol. 2, IEEE, 2005, pp. 735–740
2005
-
[26]
S. M. Richards, F. Berkenkamp, A. Krause, The lyapunov neural network: Adaptive stability certification for safe learning of dynamical systems, in: Conference on robot learning, PMLR, 2018, pp. 466–476
2018
-
[27]
Chang, N
Y .-C. Chang, N. Roohi, S. Gao, Neural lyapunov con- trol, Advances in neural information processing systems 32 (2019)
2019
-
[28]
S. Chen, M. Fazlyab, M. Morari, G. J. Pappas, V . M. Pre- ciado, Learning region of attraction for nonlinear systems, in: 2021 60th IEEE Conference on Decision and Control (CDC), IEEE, 2021, pp. 6477–6484
2021
-
[29]
R. Zhou, T. Quartz, H. De Sterck, J. Liu, Neural lyapunov control of unknown nonlinear systems with stability guar- antees, Advances in Neural Information Processing Sys- tems 35 (2022) 29113–29125
2022
-
[30]
J. Wu, A. Clark, Y . Kantaros, Y . V orobeychik, Neural lya- punov control for discrete-time systems, Advances in neu- ral information processing systems 36 (2023) 2939–2955
2023
-
[31]
Grande, A
D. Grande, A. Peruffo, E. Anderlini, G. Salavasidis, Aug- mented neural Lyapunov control, IEEE Access 11 (2023) 67979–67986
2023
-
[32]
Abate, D
A. Abate, D. Ahmed, M. Giacobbe, A. Peruffo, Formal synthesis of lyapunov neural networks, IEEE Control Sys- tems Letters 5 (3) (2020) 773–778
2020
- [33]
-
[34]
H. Dai, B. Landry, M. Pavone, R. Tedrake, Counter- example guided synthesis of neural network lyapunov functions for piecewise linear systems, in: 2020 59th IEEE Conference on Decision and Control (CDC), IEEE, 2020, pp. 1274–1281
2020
- [35]
- [36]
- [37]
-
[38]
D. E. Knuth, The art of computer programming, V ol. 1, Pearson Education, 1997
1997
-
[39]
E. M. Smith, C. C. Pantelides, Global optimisation of gen- eral process models, Global optimization in engineering design (1996) 355–386
1996
-
[40]
E. M. Smith, C. C. Pantelides, A symbolic reformula- tion/spatial branch-and-bound algorithm for the global op- timisation of nonconvex minlps, Comput. Chem. Eng. 23 (4-5) (1999) 457–478
1999
-
[41]
J. R. Koza, Genetic programming as a means for program- ming computers by natural selection, Statistics and com- puting 4 (2) (1994) 87–112
1994
-
[42]
Grosman, D
B. Grosman, D. R. Lewin, Lyapunov-based stability anal- ysis automated by genetic programming, in: 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applica- tions, 2006 IEEE International Symposium on Intelligent Control, IEEE, 2006, pp. 766–771
2006
-
[43]
J. S. McGough, A. W. Christianson, R. C. Hoover, Sym- bolic computation of lyapunov functions using evolution- ary algorithms, in: Proceedings of the 12th IASTED in- ternational conference, V ol. 15, 2010, pp. 508–515
2010
-
[44]
Globally Optimal Symbolic Regression
V . Austel, S. Dash, O. Gunluk, L. Horesh, L. Liberti, G. Nannicini, B. Schieber, Globally optimal symbolic re- gression, arXiv preprint arXiv:1710.10720 (2017)
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[45]
Cozad, N
A. Cozad, N. V . Sahinidis, A global MINLP approach to symbolic regression, Math. Program. 170 (2018) 97–119
2018
-
[46]
Neumann, L
P. Neumann, L. Cao, D. Russo, V . S. Vassiliadis, A. A. Lapkin, A new formulation for symbolic regression to identify physico-chemical laws from experimental data, Chem. Eng. J. 387 (2020) 123412
2020
-
[47]
J. Kim, S. Leyffer, P. Balaprakash, Learning symbolic ex- pressions: Mixed-integer formulations, cuts, and heuris- tics, INFORMS Journal on Computing 35 (6) (2023) 1383–1403
2023
-
[48]
Alfarano, F
A. Alfarano, F. Charton, A. Hayat, Global lyapunov func- tions: a long-standing open problem in mathematics, with symbolic transformers, Advances in Neural Information Processing Systems 37 (2024) 93643–93670
2024
- [49]
- [50]
-
[51]
M. R. Engle, N. V . Sahinidis, Deterministic symbolic re- gression with derivative information: General methodol- ogy and application to equations of state, AIChE Journal 68 (6) (2022) e17457
2022
-
[52]
M. L. Bynum, G. A. Hackebeil, W. E. Hart, C. D. Laird, B. L. Nicholson, J. D. Siirola, J.-P. Watson, D. L. Woodruff, Pyomo–optimization modeling in python, 3rd Edition, V ol. 67, Springer Science & Business Media, 2021
2021
-
[53]
URLhttps://www.gurobi.com
Gurobi Optimization, LLC, Gurobi Optimizer Reference Manual (2026). URLhttps://www.gurobi.com
2026
-
[54]
A. M. Geoffrion, Generalized benders decomposition, Journal of optimization theory and applications 10 (4) (1972) 237–260
1972
-
[55]
X. Li, A. Tomasgard, P. I. Barton, Nonconvex generalized benders decomposition for stochastic separable mixed- integer nonlinear programs, Journal of optimization the- ory and applications 151 (3) (2011) 425–454. 12
2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.