Information-Preserving Continuous Occupancy Mapping with Variance-Weighted Submap Joining
Pith reviewed 2026-06-27 12:55 UTC · model grok-4.3
The pith
A continuous probabilistic submap joining framework using information-preserving log-odds compression achieves higher pose accuracy and global consistency than grid-based methods.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that a continuous probabilistic submap joining framework jointly optimizes submap poses and a global occupancy field in latent log-odds space via an information-preserving sparse Bayesian formulation that compresses raw observations into sufficient-statistic log-odds tuples while retaining posterior information, yielding closed-form predictive mean and variance estimates that enable analytical Jacobians and a closed-form optimal global map upon pose convergence.
What carries the argument
The information-preserving sparse Bayesian formulation that compresses raw occupancy observations into sufficient-statistic log-odds tuples while retaining the posterior information
If this is right
- Higher pose accuracy than state-of-the-art grid-based submap joining approaches
- Improved global consistency compared to grid-based methods
- More compact map representations than existing continuous occupancy mapping methods
- Better-calibrated uncertainty estimates than existing continuous occupancy mapping methods
Where Pith is reading between the lines
- The closed-form global map upon pose convergence could support incremental updates when new submaps arrive without restarting the entire optimization.
- Operating directly in continuous space may allow smoother coupling with differentiable planning or control modules that rely on gradient information from the map.
- Variance-weighted joining may extend naturally to multi-robot scenarios where each robot contributes submaps with differing sensor noise characteristics.
Load-bearing premise
The sparse Bayesian formulation can compress raw occupancy observations into sufficient-statistic log-odds tuples while fully retaining the posterior information of the original observations, enabling closed-form predictive mean and variance estimates.
What would settle it
A side-by-side comparison on the same simulated and real-world datasets showing that the compressed log-odds tuples lose measurable posterior information relative to raw observations, or that the method fails to exceed grid-based pose accuracy, would falsify the central claims.
Figures





read the original abstract
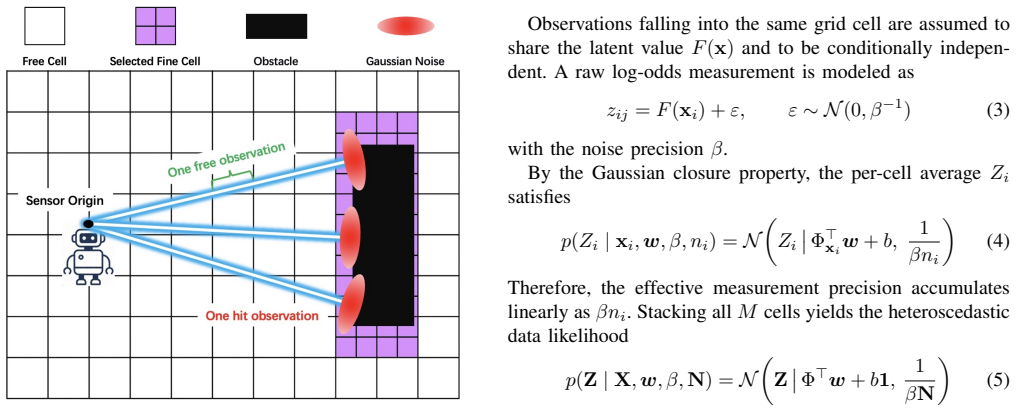
Large-scale SLAM remains challenging due to accumulated trajectory drift and the increasing computational cost of maintaining global consistency. Submap joining alleviates these issues by constructing locally consistent submaps and subsequently fusing them into a global map. However, existing occupancy-based submap joining methods operate on discrete grids, resulting in non-smooth gradients during optimization and neglecting the uncertainty associated with occupancy estimates. We propose the first continuous probabilistic submap joining framework that jointly optimizes submap poses and a global occupancy field in the latent log-odds space. The framework employs an information-preserving sparse Bayesian formulation that compresses raw occupancy observations into sufficient-statistic log-odds tuples while retaining the posterior information of the original observations. This yields closed-form predictive mean and variance estimates for occupancy mapping, which directly enable a submap joining formulation with analytical Jacobians, leading to more accurate submap joining and yielding a closed-form optimal global map upon pose convergence. Experiments on both simulated and large-scale real-world datasets demonstrate that the proposed method achieves higher pose accuracy and improved global consistency than state-of-the-art grid-based submap joining approaches, while producing more compact map representations and better-calibrated uncertainty estimates than existing continuous occupancy mapping methods.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes the first continuous probabilistic submap joining framework for large-scale SLAM occupancy mapping. It introduces a sparse Bayesian formulation that compresses raw occupancy observations into sufficient-statistic log-odds tuples while retaining the full posterior, yielding closed-form predictive mean/variance estimates and analytical Jacobians. This enables joint optimization of submap poses and a global occupancy field in latent log-odds space, producing a closed-form optimal global map upon convergence. Experiments on simulated and large-scale real-world datasets claim superior pose accuracy and global consistency versus grid-based submap joining methods, plus more compact representations and better-calibrated uncertainty than existing continuous occupancy methods.
Significance. If the information-preserving compression property holds, the work offers a principled advance for continuous occupancy mapping in SLAM by replacing discrete grids with a formulation that supports efficient, differentiable joining and explicit uncertainty propagation. The closed-form predictive statistics and analytical Jacobians are explicit strengths that could improve optimization stability and enable tighter integration with pose-graph methods. Experimental claims of improved compactness and calibration on real-world data, if substantiated, would strengthen the case for adoption in large-scale robotics applications.
minor comments (3)
- [Abstract] Abstract: the phrase 'information-preserving sparse Bayesian formulation' is central but introduced without a forward reference to the specific theorem or proposition that formally proves posterior retention; add an explicit pointer in the abstract or introduction.
- The title emphasizes 'Variance-Weighted Submap Joining' yet the abstract describes the weighting only implicitly through the log-odds tuples; ensure the weighting mechanism is defined with an equation number in §3 or §4 so readers can locate it immediately.
- Notation: the 'sufficient-statistic log-odds tuples' are referenced repeatedly but lack an early, self-contained definition (e.g., a boxed equation showing the tuple components and their relation to the original occupancy likelihood); this would aid readability without altering technical content.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our work on the first continuous probabilistic submap joining framework and for recommending minor revision. The recognition of the information-preserving compression, closed-form predictive statistics, and analytical Jacobians is appreciated.
Circularity Check
No significant circularity detected
full rationale
The paper's central derivation rests on introducing a sparse Bayesian formulation that compresses occupancy observations into log-odds tuples while retaining posterior information, yielding closed-form predictive statistics and analytical Jacobians for submap joining. No equations, self-citations, or fitted parameters are exhibited that reduce any claimed prediction or uniqueness result to its own inputs by construction. The information-preserving property is asserted as a feature of the chosen formulation rather than derived tautologically from prior results or data fits within the paper. Experimental claims of improved accuracy and consistency are presented as empirical outcomes, not forced by the method's definition. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Method for registration of 3-d shapes
Paul J Besl and Neil D McKay. Method for registration of 3-d shapes. InSensor fusion IV: control paradigms and data structures, volume 1611, pages 586–606. Spie, 1992
1992
-
[2]
A volumetric method for building complex models from range images
Brian Curless and Marc Levoy. A volumetric method for building complex models from range images. InProceed- ings of the 23rd annual conference on Computer graphics and interactive techniques, pages 303–312, 1996
1996
-
[3]
Prob- abilistic map fusion for fast, incremental occupancy map- ping with 3D Hilbert Maps
Kevin Doherty, Jinkun Wang, and Brendan Englot. Prob- abilistic map fusion for fast, incremental occupancy map- ping with 3D Hilbert Maps. In2016 IEEE International Conference on Robotics and Automation (ICRA), pages 1011–1018. IEEE, 2016
2016
-
[4]
Au- tonomous navigation in unknown environments with sparse bayesian kernel-based occupancy mapping.IEEE Transactions on Robotics, 38(6):3694–3712, 2022
Thai Duong, Michael Yip, and Nikolay Atanasov. Au- tonomous navigation in unknown environments with sparse bayesian kernel-based occupancy mapping.IEEE Transactions on Robotics, 38(6):3694–3712, 2022
2022
-
[5]
Using occupancy grids for mobile robot perception and navigation.Computer, 22(6):46–57, 1989
Alberto Elfes. Using occupancy grids for mobile robot perception and navigation.Computer, 22(6):46–57, 1989
1989
-
[6]
Colmap: A memory-efficient occupancy grid mapping framework
Alex Fisher, Ricardo Cannizzaro, Madeleine Cochrane, Chatura Nagahawatte, and Jennifer L Palmer. Colmap: A memory-efficient occupancy grid mapping framework. Robotics and Autonomous Systems, 142:103755, 2021
2021
-
[7]
Cedric Le Gentil, Cedric Pradalier, and Timothy D Barfoot. Towards efficient occupancy mapping via gaussian process latent field shaping.arXiv preprint arXiv:2506.13640, 2025
arXiv 2025
-
[8]
Real-time loop closure in 2d lidar slam
Wolfgang Hess, Damon Kohler, Holger Rapp, and Daniel Andor. Real-time loop closure in 2d lidar slam. In 2016 IEEE international conference on robotics and automation (ICRA), pages 1271–1278. IEEE, 2016
2016
-
[9]
Virtual occupancy grid map for submap-based pose graph slam and planning in 3d environments
Bing-Jui Ho, Paloma Sodhi, Pedro Teixeira, Ming Hsiao, Tushar Kusnur, and Michael Kaess. Virtual occupancy grid map for submap-based pose graph slam and planning in 3d environments. In2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 2175–2182. IEEE, 2018
2018
-
[10]
Octomap: An efficient probabilistic 3d mapping framework based on octrees
Armin Hornung, Kai M Wurm, Maren Bennewitz, Cyrill Stachniss, and Wolfram Burgard. Octomap: An efficient probabilistic 3d mapping framework based on octrees. Autonomous robots, 34(3):189–206, 2013
2013
-
[11]
Sparse local submap joining filter for building large-scale maps.IEEE Transactions on Robotics, 24(5):1121–1130, 2008
Shoudong Huang, Zhan Wang, and Gamini Dissanayake. Sparse local submap joining filter for building large-scale maps.IEEE Transactions on Robotics, 24(5):1121–1130, 2008
2008
-
[12]
Warped gaussian processes occupancy mapping with uncertain inputs.IEEE Robotics and Automation Letters, 2(2):680–687, 2017
Maani Ghaffari Jadidi, Jaime Valls Miro, and Gamini Dissanayake. Warped gaussian processes occupancy mapping with uncertain inputs.IEEE Robotics and Automation Letters, 2(2):680–687, 2017
2017
-
[13]
Rmap: a rectangular cuboid approximation framework for 3d environment mapping.Autonomous Robots, 37(3):261– 277, 2014
Sheraz Khan, Athanasios Dometios, Chris Verginis, Costas Tzafestas, Dirk Wollherr, and Martin Buss. Rmap: a rectangular cuboid approximation framework for 3d environment mapping.Autonomous Robots, 37(3):261– 277, 2014
2014
-
[14]
Gmmap: Memory-efficient continuous occupancy map using gaussian mixture model.IEEE Transactions on Robotics, 40:1339–1355, 2024
Peter Zhi Xuan Li, Sertac Karaman, and Vivienne Sze. Gmmap: Memory-efficient continuous occupancy map using gaussian mixture model.IEEE Transactions on Robotics, 40:1339–1355, 2024
2024
-
[15]
High resolution maps from wide angle sonar
Hans Moravec and Alberto Elfes. High resolution maps from wide angle sonar. InProceedings. 1985 IEEE international conference on robotics and automation, volume 2, pages 116–121. IEEE, 1985
1985
-
[16]
Gaussian process occupancy maps.The International Journal of Robotics Research, 31(1):42–62, 2012
Simon T O’Callaghan and Fabio T Ramos. Gaussian process occupancy maps.The International Journal of Robotics Research, 31(1):42–62, 2012
2012
-
[17]
Hilbert maps: Scalable continuous occupancy mapping with stochastic gradient descent.The International Journal of Robotics Research, 35(14):1717–1730, 2016
Fabio Ramos and Lionel Ott. Hilbert maps: Scalable continuous occupancy mapping with stochastic gradient descent.The International Journal of Robotics Research, 35(14):1717–1730, 2016
2016
-
[18]
Gaussian processes for machine learn- ing.International journal of neural systems, 14(02):69– 106, 2004
Matthias Seeger. Gaussian processes for machine learn- ing.International journal of neural systems, 14(02):69– 106, 2004
2004
-
[19]
Bayesian hilbert maps for dynamic continuous occupancy mapping
Ransalu Senanayake and Fabio Ramos. Bayesian hilbert maps for dynamic continuous occupancy mapping. In Conference on Robot Learning, pages 458–471. PMLR, 2017
2017
-
[20]
Probabilistic robotics.Communications of the ACM, 45(3):52–57, 2002
Sebastian Thrun. Probabilistic robotics.Communications of the ACM, 45(3):52–57, 2002
2002
-
[21]
Accurate approx- imations for posterior moments and marginal densities
Luke Tierney and Joseph B Kadane. Accurate approx- imations for posterior moments and marginal densities. Journal of the american statistical association, 81(393): 82–86, 1986
1986
-
[22]
Fully exponential laplace approximations to expectations and variances of nonpositive functions.Journal of the american statistical association, 84(407):710–716, 1989
Luke Tierney, Robert E Kass, and Joseph B Kadane. Fully exponential laplace approximations to expectations and variances of nonpositive functions.Journal of the american statistical association, 84(407):710–716, 1989
1989
-
[23]
The relevance vector machine.Ad- vances in neural information processing systems, 12, 1999
Michael Tipping. The relevance vector machine.Ad- vances in neural information processing systems, 12, 1999
1999
-
[24]
Sparse bayesian learning and the relevance vector machine.Journal of machine learning research, 1(Jun):211–244, 2001
Michael E Tipping. Sparse bayesian learning and the relevance vector machine.Journal of machine learning research, 1(Jun):211–244, 2001
2001
-
[25]
Fast marginal likelihood maximisation for sparse bayesian models
Michael E Tipping and Anita C Faul. Fast marginal likelihood maximisation for sparse bayesian models. InInternational workshop on artificial intelligence and statistics, pages 276–283. PMLR, 2003
2003
-
[26]
Graph slam with signed distance function maps on a humanoid robot
Ren ´e Wagner, Udo Frese, and Berthold B ¨auml. Graph slam with signed distance function maps on a humanoid robot. In2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 2691–2698. IEEE, 2014
2014
-
[27]
A submap joining algorithm for 3d reconstruction using an rgb-d camera based on point and plane features.Robotics and Autonomous Systems, 118: 93–111, 2019
Jun Wang, Jingwei Song, Liang Zhao, Shoudong Huang, and Rong Xiong. A submap joining algorithm for 3d reconstruction using an rgb-d camera based on point and plane features.Robotics and Autonomous Systems, 118: 93–111, 2019
2019
-
[28]
Grid- based submap joining: An efficient algorithm for simul- taneously optimizing global occupancy map and local submap frames
Yingyu Wang, Liang Zhao, and Shoudong Huang. Grid- based submap joining: An efficient algorithm for simul- taneously optimizing global occupancy map and local submap frames. In2024 IEEE/RSJ International Con- ference on Intelligent Robots and Systems (IROS), pages 10121–10128. IEEE, 2024
2024
-
[29]
Occupancy-slam: An efficient and robust algorithm for simultaneously optimizing robot poses and occupancy map.IEEE Transactions on Robotics, 41:4057–4077, 2025
Yingyu Wang, Liang Zhao, and Shoudong Huang. Occupancy-slam: An efficient and robust algorithm for simultaneously optimizing robot poses and occupancy map.IEEE Transactions on Robotics, 41:4057–4077, 2025
2025
-
[30]
Fuzhen Zhang, editor.The Schur Complement and Its Applications, volume 4 ofNumerical Methods and Algorithms. Springer, New York, 2005. ISBN 978-0- 387-24271-2. doi: 10.1007/b105056
-
[31]
2d laser slam with general features represented by implicit functions.IEEE Robotics and Automation Letters, 5(3):4329–4336, 2020
Jiaheng Zhao, Liang Zhao, Shoudong Huang, and Yue Wang. 2d laser slam with general features represented by implicit functions.IEEE Robotics and Automation Letters, 5(3):4329–4336, 2020
2020
-
[32]
Linear slam: A linear solution to the feature-based and pose graph slam based on submap joining
Liang Zhao, Shoudong Huang, and Gamini Dissanayake. Linear slam: A linear solution to the feature-based and pose graph slam based on submap joining. In2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 24–30. IEEE, 2013
2013
-
[33]
Occupancy-slam: Simultaneously optimizing robot poses and continuous occupancy map
Liang Zhao, Yingyu Wang, and Shoudong Huang. Occupancy-slam: Simultaneously optimizing robot poses and continuous occupancy map. InRobotics: Science and Systems (RSS), pages 1–13. MIT Press Journals, 2022
2022
-
[34]
Continuous occupancy map fusion with fast Bayesian Hilbert Maps
Weiming Zhi, Lionel Ott, Ransalu Senanayake, and Fabio Ramos. Continuous occupancy map fusion with fast Bayesian Hilbert Maps. In2019 International Confer- ence on Robotics and Automation (ICRA), pages 4111–
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.