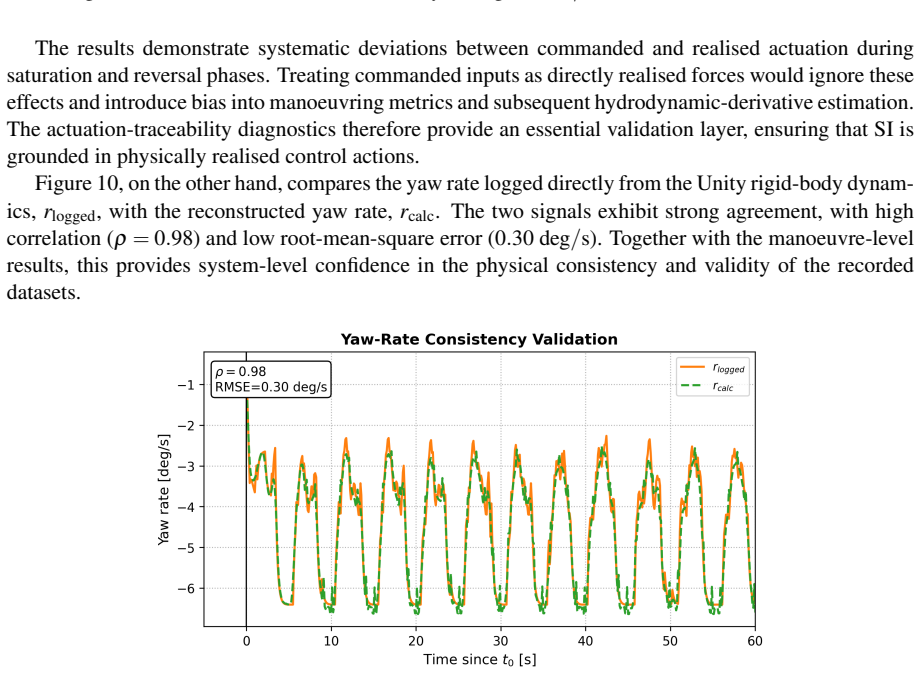
Traceable Virtual Sea Trials in the Marine Robotics Unity Simulator for Manoeuvring Assessment of Unmanned Surface Vehicles
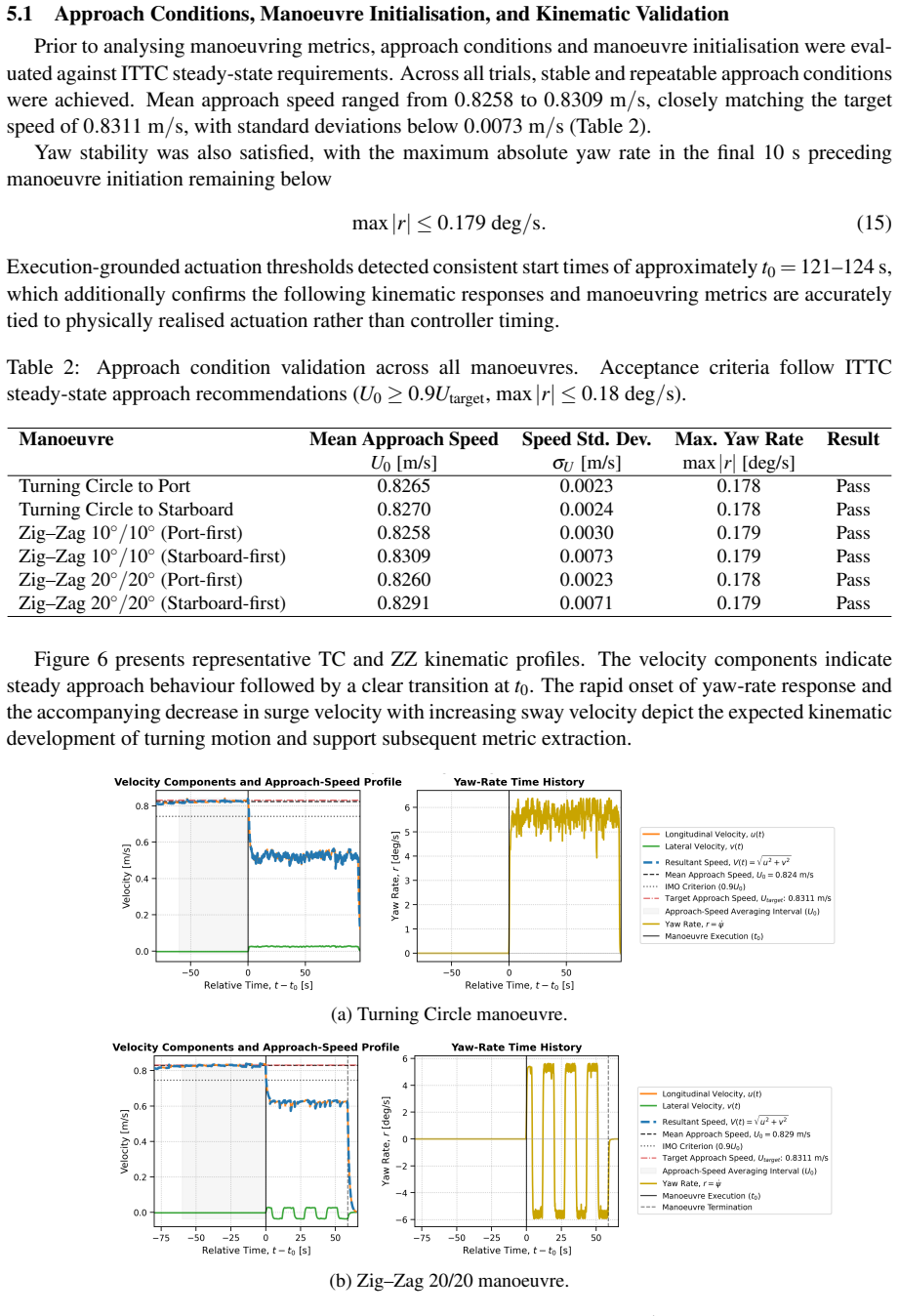
Pith reviewed 2026-06-27 09:55 UTC · model grok-4.3
The pith
A virtual sea trial framework produces traceable and repeatable manoeuvre data for unmanned surface vehicles in simulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The dedicated TC/ZZ data acquisition and post-processing pipeline improves repeatability and auditability of simulator-based manoeuvres while producing SI-ready datasets for hydrodynamic-derivative identification and digital-twin workflows, with explicit separation of command inputs from realised actuation for differential-thrust steering.
What carries the argument
The TC/ZZ data acquisition and post-processing pipeline that handles traceable command-actuation logging and automated extraction of IMO/ITTC-aligned manoeuvring metrics.
Load-bearing premise
The simulator's physics model produces manoeuvre data sufficiently representative of real USV hydrodynamics for the generated datasets to support system identification and derivative estimation.
What would settle it
Direct comparison of hydrodynamic derivatives estimated from the virtual datasets against those from physical sea trials on the same vehicle would reveal large discrepancies if the data are not representative.
Figures

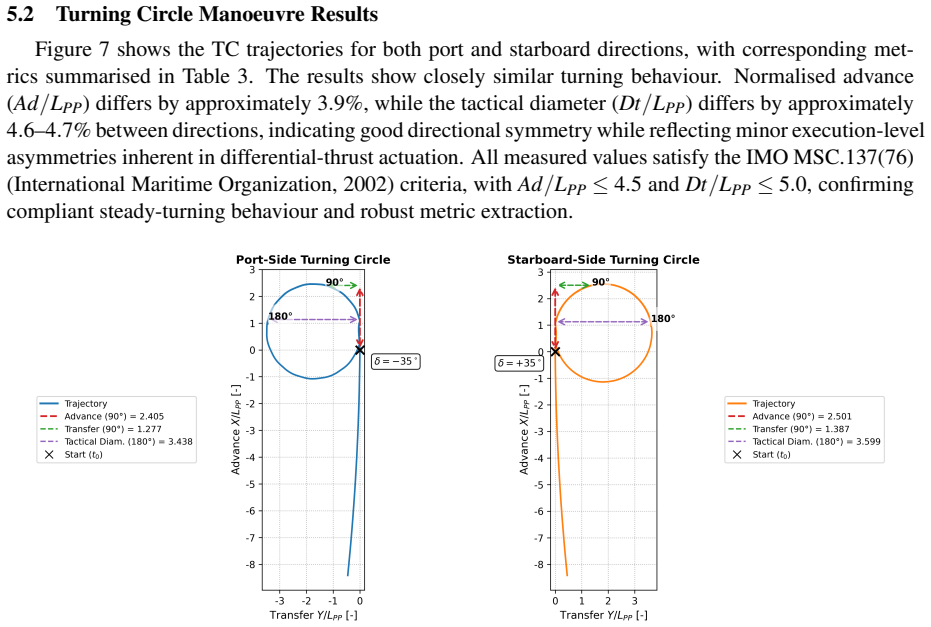
read the original abstract
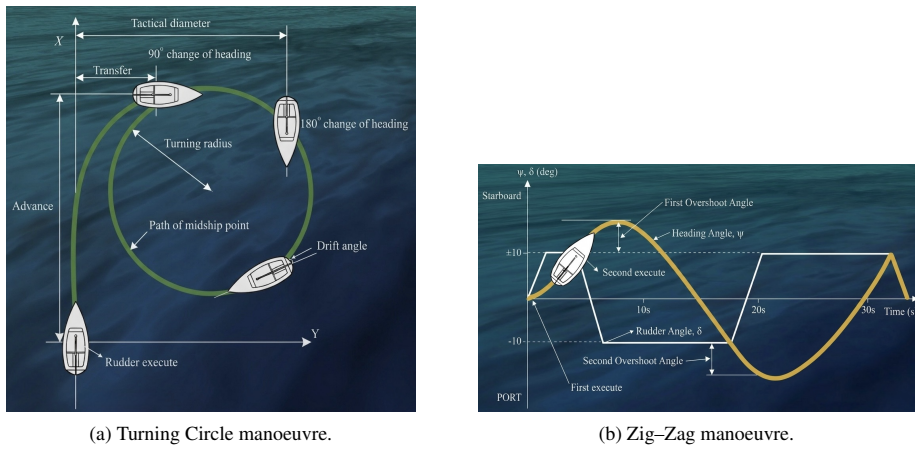
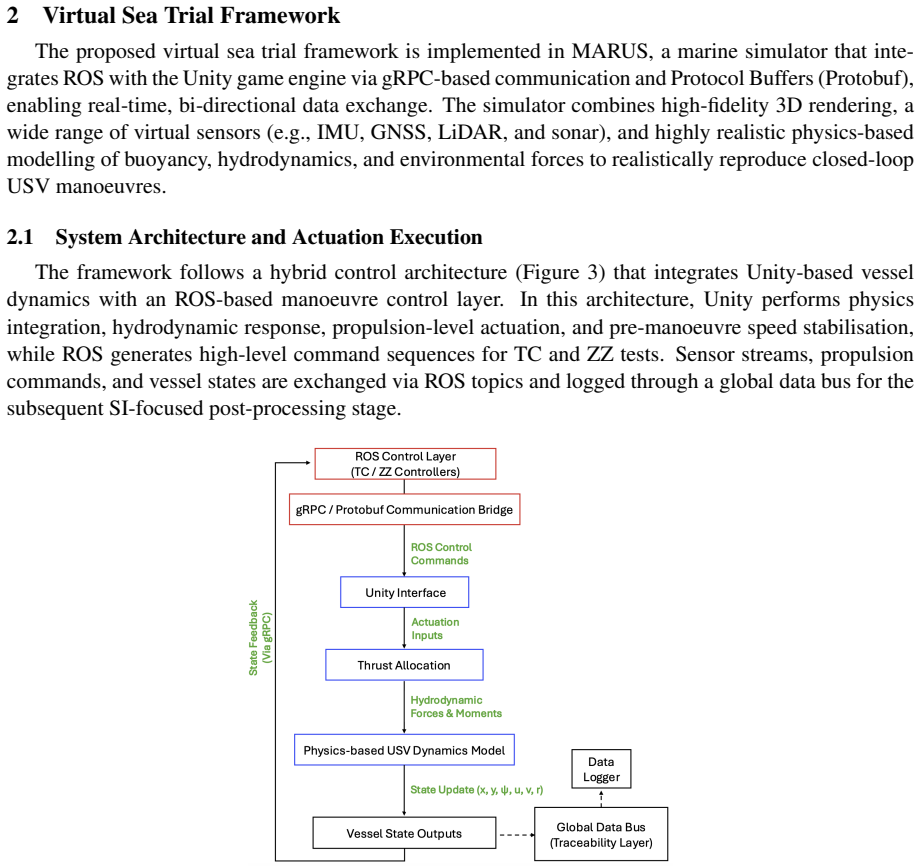
Accurate identification of hydrodynamic derivatives is essential for control and navigation of Unmanned Surface Vehicles (USVs), but high-fidelity manoeuvring data from physical sea trials are constrained by cost and safety. Turning Circle (TC) and Zig-Zag (ZZ) trials remain fundamental to IMO and ITTC assessment procedures. This paper extends the Marine Robotics Unity Simulator (MARUS) by introducing a standardised Virtual Sea Trial framework for automated execution and data generation of TC/ZZ manoeuvres, with traceable command-actuation logging, system-identification (SI)-focused data conditioning, and automated extraction of IMO/ITTC-aligned manoeuvring metrics. A key contribution is a dedicated TC/ZZ data acquisition and post-processing pipeline, improving the repeatability and auditability of simulator-based manoeuvres while producing SI-ready datasets for hydrodynamic-derivative identification and digital-twin workflows. Another feature is explicit command-execution separation for differential-thrust steering, where inputs are recorded as ordered rudder-equivalent commands and realised actuation is logged as an execution-level proxy derived from applied thrust. Case-study results demonstrate repeatable and compliant manoeuvre behaviour. For TC tests, the normalised advance differs by approximately 3.9 percent between port and starboard sides, while the tactical diameter differs by approximately 4.6 to 4.7 percent. For ZZ tests, first and second overshoot excesses remain below 1 degree for both +/- 10 degree and +/- 20 degree manoeuvres, satisfying IMO criteria, while peak yaw rates range from approximately 4.1 to 5.8 deg/s. Overall, the framework provides a repeatable and auditable virtual sea-trial workflow for generating IMO/ITTC-aligned datasets and supporting system identification, hydrodynamic-derivative estimation, and digital-twin calibration.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper extends the Marine Robotics Unity Simulator (MARUS) with a Virtual Sea Trial framework for automated Turning Circle (TC) and Zig-Zag (ZZ) manoeuvres on USVs. It adds traceable command-actuation logging (with explicit separation for differential-thrust steering), SI-focused data conditioning, and automated extraction of IMO/ITTC-aligned metrics. Case-study results report internal repeatability (TC advance difference ~3.9%, tactical diameter difference ~4.6–4.7%; ZZ overshoots <1° and peak yaw rates 4.1–5.8 deg/s) meeting IMO criteria, with the central claim that the workflow produces auditable, SI-ready datasets supporting hydrodynamic-derivative estimation and digital-twin calibration.
Significance. If the simulator's physics model is shown to be representative, the framework would provide a practical, standardised tool for generating repeatable virtual sea-trial data at lower cost and risk than physical trials. The traceable logging and post-processing pipeline address real needs for auditability in marine robotics workflows. The reported internal consistency and IMO compliance are useful indicators of workflow reliability within the simulator environment.
major comments (2)
- [Abstract / case-study results] Abstract / case-study results: the claim that the generated datasets support system identification and hydrodynamic-derivative estimation is not demonstrated. No derivatives are extracted from the TC/ZZ traces, no comparison to physical sea-trial data is shown, and the reported metrics establish only internal simulator repeatability and IMO compliance rather than external representativeness.
- [Description of the TC/ZZ data acquisition and post-processing pipeline] Description of the TC/ZZ data acquisition and post-processing pipeline: the assumption that MARUS manoeuvre data are hydrodynamically representative enough for SI and derivative estimation remains untested. No sensitivity analysis on the underlying physics model or limited validation against real USV data is provided, leaving the downstream utility claims unsubstantiated.
minor comments (1)
- [Abstract] The abstract states peak yaw rates of 4.1–5.8 deg/s without specifying the exact manoeuvre, speed, or rudder angle; adding this detail would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need to clarify the manuscript's scope. The work focuses on developing a traceable virtual sea trial framework and pipeline for generating auditable, SI-ready datasets from automated TC/ZZ manoeuvres in MARUS, with demonstrated internal repeatability and IMO compliance. We do not perform hydrodynamic derivative extraction or external validation here, as those are intended downstream uses. We address each major comment below and propose targeted revisions for clarity.
read point-by-point responses
-
Referee: [Abstract / case-study results] Abstract / case-study results: the claim that the generated datasets support system identification and hydrodynamic-derivative estimation is not demonstrated. No derivatives are extracted from the TC/ZZ traces, no comparison to physical sea-trial data is shown, and the reported metrics establish only internal simulator repeatability and IMO compliance rather than external representativeness.
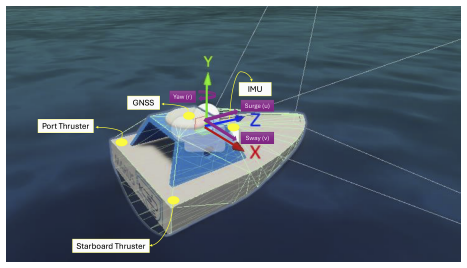
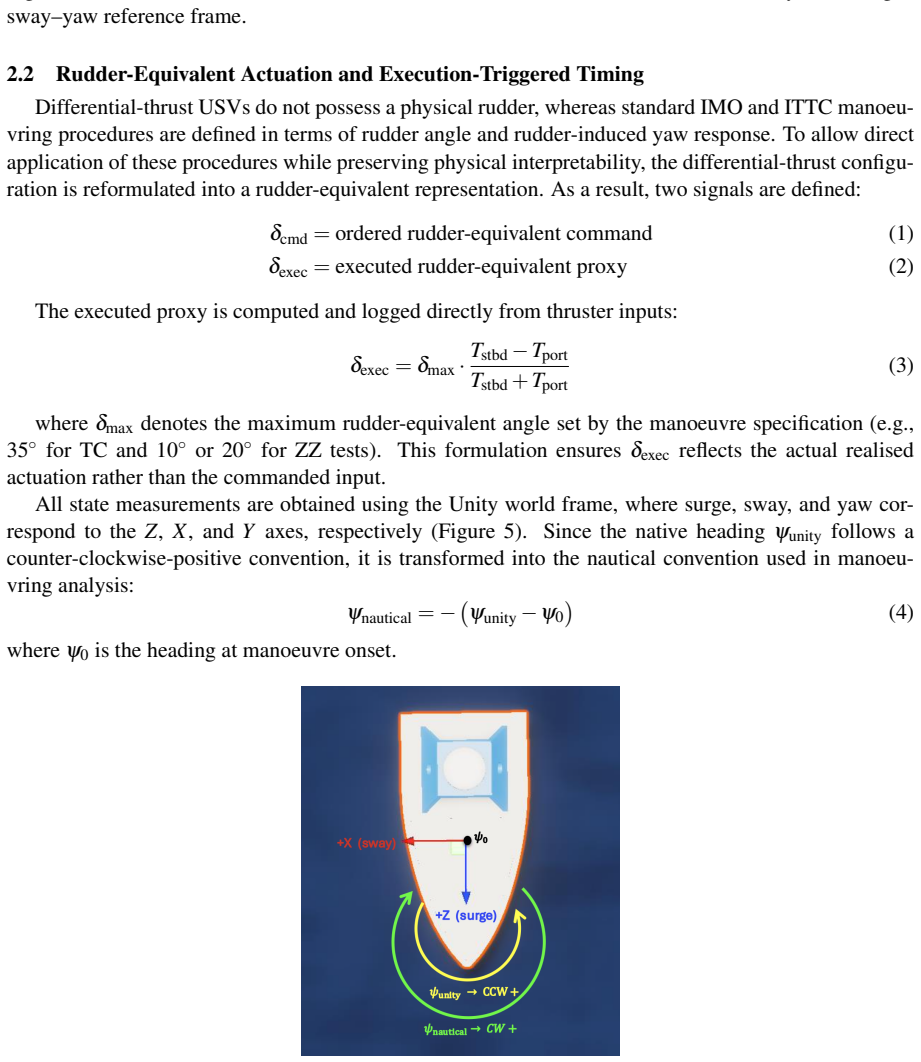
Authors: We agree the manuscript does not extract derivatives or compare to physical data. The central contribution is the automated, traceable acquisition and conditioning pipeline that produces datasets formatted and audited for subsequent SI and derivative estimation (e.g., with explicit command-actuation separation and SI-focused post-processing). The case-study metrics establish that the generated traces are repeatable and IMO-compliant within the simulator, which is a necessary foundation for their use in SI workflows. The abstract and conclusions use 'supporting' and 'for hydrodynamic-derivative identification' to indicate intended utility rather than completed demonstration. To address potential overstatement, we will revise the abstract, introduction, and conclusions to state that the framework 'produces SI-ready datasets enabling' or 'prepared for' hydrodynamic-derivative estimation, removing any implication of completed SI. revision: partial
-
Referee: [Description of the TC/ZZ data acquisition and post-processing pipeline] Description of the TC/ZZ data acquisition and post-processing pipeline: the assumption that MARUS manoeuvre data are hydrodynamically representative enough for SI and derivative estimation remains untested. No sensitivity analysis on the underlying physics model or limited validation against real USV data is provided, leaving the downstream utility claims unsubstantiated.
Authors: The paper assumes the MARUS physics model (based on standard hydrodynamic formulations in Unity) provides a suitable environment for virtual trials, consistent with other simulation studies in marine robotics. No sensitivity analysis or real-USV validation is included because the manuscript scope is the traceable pipeline and automation, not model validation. The reported internal consistency demonstrates the workflow's reliability for producing auditable data, but external representativeness would indeed require separate benchmarking. We will add an explicit limitations paragraph noting that downstream SI utility depends on the fidelity of the underlying simulator model and recommending future physical validation. revision: yes
Circularity Check
No circularity: framework description with no derivation chain
full rationale
The paper describes a software framework extension to MARUS for automated TC/ZZ virtual sea trials, including data pipelines and metric extraction. No equations, parameter fitting, predictions, or mathematical derivations appear in the provided text. All reported results concern internal simulator repeatability and IMO compliance metrics generated within the simulator itself; the central claim is the existence and auditability of the workflow, which does not reduce to any self-referential input by construction. This matches the default non-circular case for a pure engineering-framework paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
System identification of vessel manoeuvring mod- els. Ocean Engineering 266, 112940. doi:10.1016/j.oceaneng.2022.112940. Amer, A., ´Alvarez-Tu˜n´on, O., U˘gurlu, H.˙I., Le Fevre Sejersen, J., Brodskiy, Y ., Kayacan, E.,
-
[2]
Unav- sim: A visually realistic underwater robotics simulator and synthetic data-generation framework, in: 2023 21st International Conference on Advanced Robotics (ICAR), pp. 570–576. doi:10.1109/IC AR58858.2023.10406819. An, G., Xiang, G., Xiang, X., Guedes Soares, C.,
work page doi:10.1109/ic 2023
-
[3]
Physics informed neural networks based identi- fication modelling of ship maneuvering motion and associated optimal excitation design. Engineering Applications of Computational Fluid Mechanics 19, 2566860. doi:10.1080/19942060.2025. 2566860. Ariza Ramirez, W., Leong, Z.Q., Nguyen, H., Jayasinghe, S.G.,
-
[4]
Ocean Engineering 166, 26–36
Non-parametric dynamic system identification of ships using multi-output gaussian processes. Ocean Engineering 166, 26–36. doi:10 .1016/j.oceaneng.2018.07.056. Bai, X., Li, B., Xu, X., et al.,
2018
-
[5]
Journal of Marine Science and Application 21, 47–58
A review of current research and advances in unmanned surface vehicles. Journal of Marine Science and Application 21, 47–58. doi:10.1007/s11804-022-002 76-9. 14 Benjamin, M., Schmidt, H., Newman, P.M., Leonard, J.J.,
-
[6]
Autonomy for unmanned marine vehi- cles with moos-ivp, in: Marine Robot Autonomy. Springer, pp. 47–90. doi:10.1007/978-1-461 4-5659-9-2. Fossen, T.I.,
-
[7]
URL: https://doi.org/10.48550/arXiv.2502.11887, doi:10.48550/arXiv.2502.11
Stonefish: Supporting machine learning research in marine robotics. URL: https://doi.org/10.48550/arXiv.2502.11887, doi:10.48550/arXiv.2502.11
-
[8]
International Maritime Organization,
arXiv:2502.11887 [cs]. International Maritime Organization,
-
[9]
Asvsim (airsim for surface vehicles): A high-fidelity simulation framework for autonomous surface vehicle research. URL:https://doi.org/10.48550/arXiv.2506.22174, doi:10.48550/arX iv.2506.22174. arXiv:2506.22174 [cs]. Loncar, I., Obradovic, J., Krasevac, N., Mandic, L., Kvasic, I., Ferreira, F., Slosic, V ., Nad, D., Miskovic, N.,
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2506.22174
-
[10]
Marus – a marine robotics simulator, in: OCEANS 2022, Hampton Roads, pp. 1–7. doi:10 .1109/OCEANS47191.2022.9976969. Luo, W., Moreira, L., Guedes Soares, C.,
arXiv 2022
-
[11]
Manoeuvring simulation of catamaran by using implicit models based on support vector machines. Ocean Engineering 82, 150–159. doi:10.1016/j.ocea neng.2014.03.008. Lv, Z., Wang, X., Wang, G., Xing, X., Lv, C., Yu, F.,
-
[12]
Manhaes, M.M.M., Scherer, S.A., V oss, M., Douat, L.R., Rauschenbach, T.,
doi:10.3390/jmse13050969. Manhaes, M.M.M., Scherer, S.A., V oss, M., Douat, L.R., Rauschenbach, T.,
-
[13]
Uuv simulator: A gazebo-based package for underwater intervention and multi-robot simulation, in: OCEANS 2016 MTS/IEEE Monterey, pp. 1–8. doi:10.1109/OCEANS.2016.7761080. Moreira, L., Guedes Soares, C.,
-
[14]
Modeling, Identification and Control: A Norwegian Research Bulletin 27, 259–275
An overview of the marine systems simu- lator (mss): A simulink toolbox for marine control systems. Modeling, Identification and Control: A Norwegian Research Bulletin 27, 259–275. doi:10.4173/mic.2006.4.4. Potokar, E., Ashford, S., Kaess, M., Mangelson, J.G.,
-
[15]
In: 2022 International Conference on Robotics and Automation (ICRA)
Holoocean: An underwater robotics simulator, in: 2022 International Conference on Robotics and Automation (ICRA), pp. 3040–3046. doi:10.1109/ICRA46639.2022.9812353. Smith, P., Dunbabin, M.,
-
[16]
IEEE Journal of Oceanic Engineering 44, 310–319
High-fidelity autonomous surface vehicle simulator for the maritime robotx challenge. IEEE Journal of Oceanic Engineering 44, 310–319. doi:10.1109/JOE.2018.2 875571. Sukas, O.F., Kinaci, O.K., Bal, S.,
-
[17]
Theoretical background and application of mansim for ship maneuvering simulations. Ocean Engineering 192, 106239. doi:10.1016/j.oceaneng.2019. 106239. Tadros, M., Aung, M.Z., Louvros, P., Pollalis, C., Nazemian, A., Boulougouris, E.,
-
[18]
Journal of Marine Science and Engineering 13,
Ship manoeu- vring research 2010–2025: From hydrodynamics and control to digital twins, ai and mass. Journal of Marine Science and Engineering 13,
2010
-
[19]
Umenberger, J., Wgberg, J., Manchester, I.R., Sch¨on, T.B.,
doi:10.3390/jmse13122322. Umenberger, J., Wgberg, J., Manchester, I.R., Sch¨on, T.B.,
-
[20]
Maximum likelihood identification of 15 stable linear dynamical systems. Automatica 96, 280–292. doi:10.1016/j.automatica.201 8.06.036. Wang, Z., Qiu, C., Dong, Z., Cheng, S., Zheng, L., Chen, S.,
-
[21]
doi:10.3390/jmse13071341. Xu, H., Guedes Soares, C.,
-
[22]
Journal of Marine Science and Application 24, 459–478
Review of system identification for manoeuvring modelling of marine surface ships. Journal of Marine Science and Application 24, 459–478. doi:10.1007/s11804-0 25-00681-w. Yasukawa, H., Yoshimura, Y .,
-
[23]
ISA Transactions 58, 186–195
Multi-innovation auto-constructed least squares identification for 4 dof ship manoeuvring modelling with full-scale trial data. ISA Transactions 58, 186–195. doi:10 .1016/j.isatra.2015.04.004. Zhang, M.M., Choi, W.S., Herman, J., Davis, D., V ogt, C., McCarrin, M., Vijay, Y ., Dutia, D., Lew, W., Peters, S., Bingham, B.,
2015
-
[24]
Dave aquatic virtual environment: Toward a general underwater robotics simulator, in: 2022 IEEE/OES Autonomous Underwater Vehicles Symposium (AUV), pp. 1–8. doi:10.1109/AUV53081.2022.9965808. 16
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.